基于静态重叠网格法的全附体潜艇的斜航仿真
2023-07-03张大朋赵博文
张大朋,严 谨,赵博文
(1. 广东海洋大学船舶与海运学院,广东 湛江 524088;2. 浙江大学海洋学院, 浙江 舟山 316021)
1 引言
潜艇是一种既能在水面航行又能在水下潜行并进行作战活动的军用舰船,其最大的特点是具有良好的隐蔽性和机动性[1]。作为海军主要作战单位之一,潜艇需要完成一系列具有即时性、战术性以及紧急性特点的操纵运动,这就需要潜艇具有良好的操纵性[2]。因此,对于潜艇操纵性的研究历来都是潜艇总体设计中的一项重要内容[3]。斜航试验一般在普通长条形拖曳水池或风洞中进行,用来确定漂角的位置导数。试验时船模安装在拖车上,其中纵剖面与水池中心线成一夹角,做等速斜航运动。试验过程中,通过系统地改变漂角β,测量船模所受的拘束力和力矩,从而可以求得水动力位置导数[4]。
目前对潜艇斜航的数值模拟方法可以简单分为两种[5]:一种是模型不动,按照漂角β设置入口速度分量;另一种是模型按照实际漂角β设置,只在入口处给定速度。第一种方法分别在模型前方和侧方的速度入口处设置流速的分量u和v,两个流速分量在模型处合成一个新的流速,该流速和模型的夹角即为漂角β。该方法有一定的不便之处:由于模型和水流进行了等同处理,与直接更换模型角度的方法相比,求解设置更加繁琐,对首次接触CFD的初学者来说并不友好。除此之外,由于模型和计算域的相对位置始终不变,该方法不能直观的反应模型漂角β的改变对周围流场的影响,模型和水流之间的扰动作用也并不明显,因此可能在一定程度上增大计算误差。
第二种方法通过改变模型角度实现漂角β的变换,直观上比第一种方法更接近现实。但每次更换漂角时都需要改变模型角度,虽然各水域工况下水下航行器的几何模型和水域模型是相同的,但漂角的改变带来了航行器姿态的变化,因此需要对每一个水域工况进行模型重建,同时需要重新关联网格设置,这样必将大大增加划分网格的工作量,同时增大了完成一个水域工况计算所需的周期,给计算工作增添了很多重复繁琐且不必要的步骤。
基于此,本文采用一种新的计算方法——静态重叠网格法,该方法有一个包络模型的重叠区域和一个大范围的静止区域,每次变化漂角只需要改变重叠区域的角度,网格不需要重新生成。既能够直观的反应真实模型状态,又不需要重新关联网格,极大的减小了工作量,节约了时间成本。
2 潜艇空间运动受力分析
2.1 坐标系及参数表达
为了方便研究潜艇在海洋空间中运动的动力学问题,本章采用如图1所示的两个坐标系:一个是固定在大地上的惯性坐标系O-ξηζ;另一个是坐标原点固定在艇体重心上的随艇一起运动的艇体坐标系G-xyz,x轴正向指向船艏,y轴正向指向右舷,z轴正向指向船底,两个坐标系均为右手坐标系。运动的艇体坐标系还可以分解为水平面上的坐标系和垂直面上的坐标系。
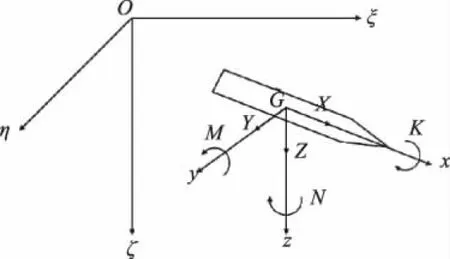
图1 惯性坐标系和艇体坐标系
通常情况下采用不同的坐标系描述运动问题没有本质上的差别,除了上述艇体坐标系外,还有一种应用在导弹运动、鱼雷航行过程中的雷体坐标系。艇体坐标系和雷体坐标系在受力分析上没有本质上的差别,只有在拟合水动力系数过程中和运动控制系统上有所区别。本文主要研究全附体潜艇的水动力性能,并不涉及运动控制系统,因此为了方便研究,选取艇体坐标系作为运动坐标系,潜艇的操纵运动方程也是在图1所示的艇体坐标系下建立。
艇体坐标系下,潜艇相对于固定坐标系的平移速度U可以分解为x轴上的纵向速度u、y轴上的侧向速度v和z轴上的垂向速度w,同样的,绕艇体重心G转动的角速度Ω也可以分解为横摇角速度p,俯仰角速度q和偏航角速度r,力和力矩在艇体坐标系上分解同样可以得到三个分量。现将艇体坐标系下潜艇的运动参数和水动力表达列于表1中。
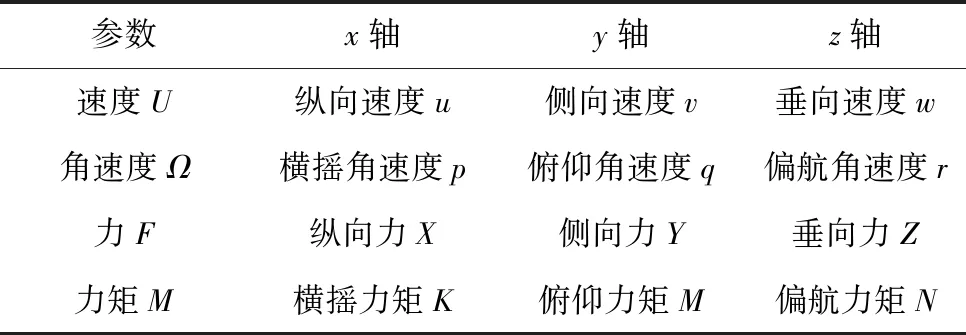
表1 运动参数和水动力表达
水平面运动中,潜艇重心处的速度矢量U与x轴正方向的夹角称为漂角β,规定由速度矢量U转到x轴顺时针方向为正,符合右手法则;垂直面运动中,速度矢量U与x轴正方向的夹角称为攻角α,规定由速度矢量U转到x轴逆时针向为正,同样符合右手法则。
2.2 潜艇流体动力
潜艇在水中运动过程中受到的力可分为流体静力和流体动力。流体静力是指潜艇受到的重力和浮力;流体动力是指潜艇在水中运动时,艇体、螺旋桨、舵和附体等推动周围流场的物体与水之间的相互作用力。艇体的运动、螺旋桨的旋转会使周围的水流运动,从而引起运动的水流对艇体的反作用力。这种反作用力的大小、方向和分布都取决于潜艇的运动,所以在操纵性研究中,通常把艇体与舵作为一个整体,操舵看作是艇形的改变(本章不考虑转舵的情况),而把螺旋桨的水动力分开研究。除此之外,为了简化问题,一般认为潜艇在平静的无限深广水域中运动,即不考虑流场边界的影响。


图2 水平面坐标系
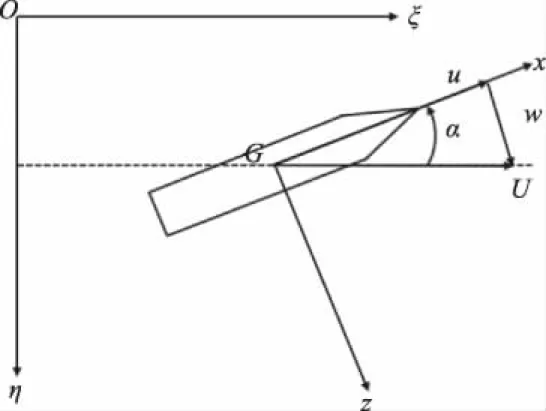
图3 垂直面坐标系
2.3 潜艇流体惯性力
流体惯性力只与加速度项和加速度线性项相关。潜艇空间六个自由度的运动所有的流体惯性力共有36项

(1)

2.4 流体黏性力


(2)
垂直面的黏性力(矩)可以表示为

(3)
式中,一阶水动力系数可以细分为:位置导数Yv,Nv,Zw,Mw(又称速度导数)和旋转导数Yr,Nr,Zq,Mq(又称角速度导数)。
当考虑空间运动时,就需要考虑平面运动之间的相互影响,这其中包括横倾运动时速度引起的水动力、既有攻角又有漂角的斜侧直航、同时有侧向速度v和角速度ω的耦合运动等。为了详细讲解水动力系数的求解过程以及仿真流程,本章的水动力计算均在水平面和垂直面中进行,不考虑空间的复杂状况。
2.5 无因次化体系
由于物体的水动力特性只和其水动力外形及布局有关,而不受具体几何尺寸或者水密度、航速、质量等因素的影响,因此为了在讨论中排除不同尺寸、航速等因素对其所受水动力的影响,在潜艇的水动力学中引入了无因次化体系。无因次化体系中的基本物理量列于表2中。

表2 无因次体系的基本物理量

表3 无因次体系的物理量
基本量的额定值将作为其自身无因次化的基值,同时基本量基值的不同组合也确定了其余所有水动力量的基值。在基本量基值的基础上可以得到无因次化后的物理量:
3 全附体潜艇的斜航仿真
3.1 SUBOFF模型
SUBOFF潜艇模型是美国国防高等研究计划署设计[12]专门用于验证CFD计算准确性的标准模型。目前很多国家对SUBOFF模型进行了系统的水动力性能计算及流场的测试试验,。本文以SUBOFF全附体潜艇为计算模型。
SUBOFF全附体潜艇由一个回转的裸艇体、一个指挥台围壳和四个呈十字形分布的尾舵翼组成,实际潜艇总长104.5米,采用1:24缩小模型。首部长度1.016米,平行中段长度2.229米,尾部长度1.111米,总长4.356米。艇身最大回转直径为0.508米。指挥台前缘位于艇体0.924米处,指挥台长0.368米,高0.46米。尾翼后缘位于4.007米处,呈十字形布置。
SUBOFF的主尺度和几何模型见表4和图4。

表4 SUBOFF主尺度
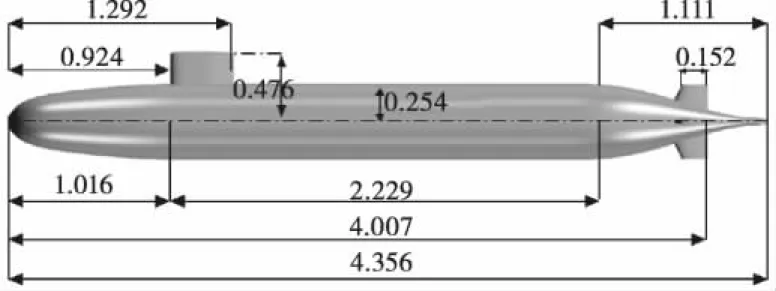
图4 SUBOFF全附体几何模型

图5 SUBOFF的艇体坐标系
图6 艇体面网格
3.2 导入模型
斜航模拟中对惯性坐标系的位置并无特殊要求,但仍建议将惯性坐标系放置在艇的重心上,x轴正向指向艇艏,y轴指向右舷侧,z轴指向艇底,原点距离艇艏2.009m。这样做的好处是可以在惯性坐标系的基础上直接生成一个相同的坐标系,该坐标系即为斜航的艇体坐标系。
3.3 建立计算域
建模时圆柱半径设置为0.55m,该半径不仅要包络住艇的最大回转半径体,还要包含艇上的围壳指挥台。斜航模拟的计算域大小一般通过以下准则确定:入口边界距离艇艏1.5倍艇长,出口边界距离艇尾2.5倍艇长,艇四周均为1.5倍艇长,可以根据实际工况适当调整计算域大小。
重叠网格和背景网格通过交界面进行插值计算和流场信息的交换,通常情况下,两套网格重叠部分的网格尺寸要保持一致,而且背景网格的加密区域在交界面处要至少向两侧延伸两层密网格厚度,以保证两套网格插值计算的准确性。
回转形状的艇体和三维水翼状的尾舵曲率变化较大,因此需要添加面加密来捕捉其形状和结构,整个重叠区域也是水流和艇体产生相互作用的区域,其网格也需要加密。
重叠网格尺寸和背景网格在重叠区域的尺寸应保持一致,以确保交界面处插值计算稳定。最终生成的重叠区域网格数量约104万,背景区域网格约330万,总计约434万。
初始状态(计算未开始时),重叠网格和背景网格会处于如图7所示的互相交错状态。计算过程中,背景网格中重叠的部分会被挖去,只有交界面两侧会有网格重叠,如图8所示。通过转换重叠区域的角度来实现潜艇漂角和攻角的变化。约束模操纵性实验得到的水动力系数都是由艇体坐标系下的力和力矩拟合而得,因此原始艇体坐标系也需要转换相同的角度。

图7 初始状态的重叠网格和背景网格

图8 计算过程中的重叠网格和背景网格
4 后处理和数据分析
4.1 水动力系数
斜航实验主要测定潜艇无因次的位置导数(速度导数),包括水平面的Yv′、Nv′和垂直面的Zw′、Mw′。将漂角(攻角)-14°~14°范围内的一系列试验工况下所得的力和力矩按表3进行无因次化处理并拟合,拟合后的曲线如图9所示。
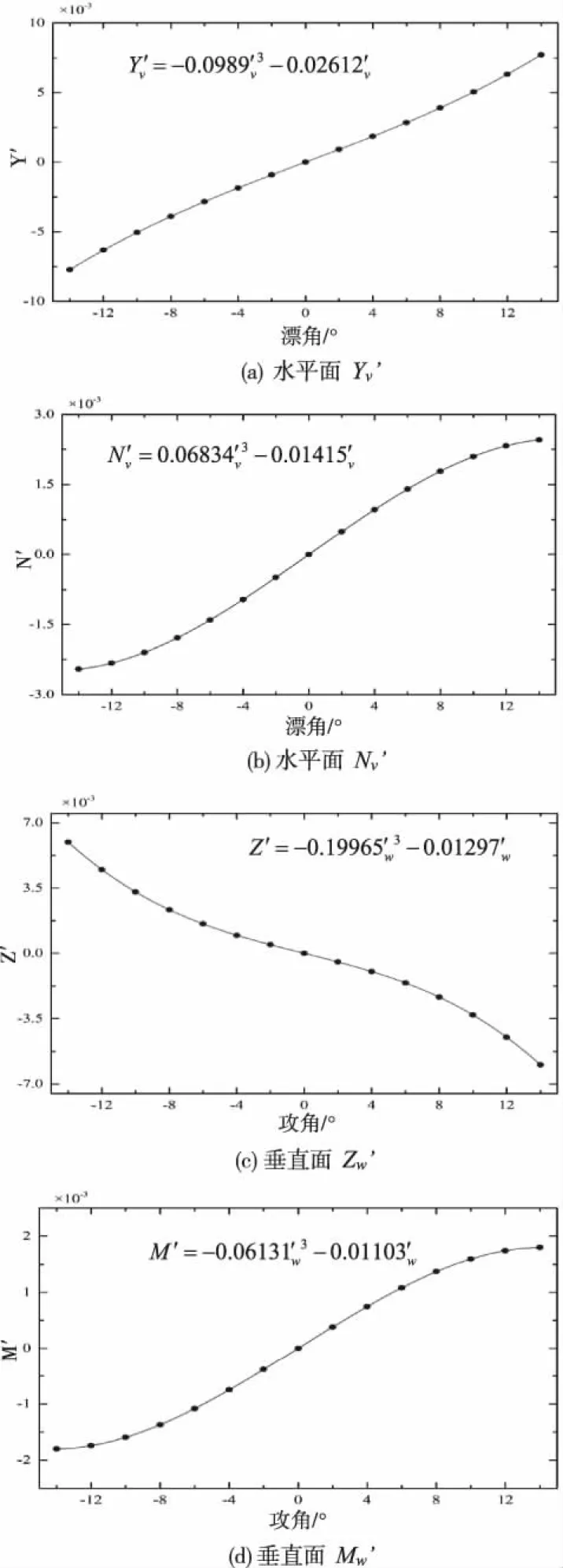
图9 拟合曲线
拟合曲线中的一阶系数即为潜艇无因次的速度系数,将其与美国泰勒研究中心所测得的试验数据进行对比,列于表5中。
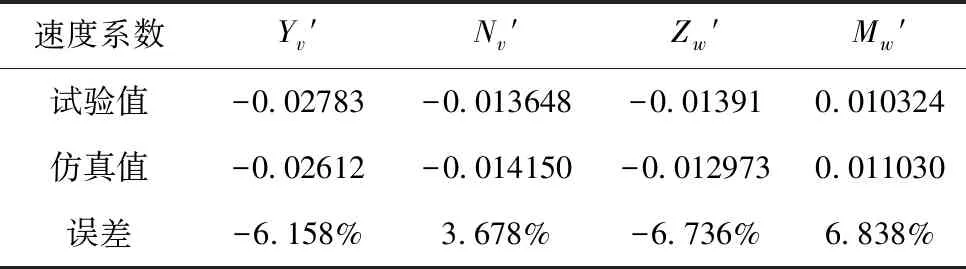
表5 斜航水动力系数比较
由表5可知,仿真值与试验值相比,最大误差不超过7%。在±4°的小漂角范围内,潜艇所受的力和力矩基本上呈线性分布,随着漂角的增大,力和力矩之间的非线性增大,这也就多出了拟合方程中的三次项。如果将整个潜艇看作一个特殊的巨大水翼,那么艇长就相当于水翼的弦长,艇的回转半径(艇宽)相当于翼厚,由于回转半径同艇长相比是一个极小值,所以潜艇也可以看作是一个展弦比极小的水翼。因此在水平面的斜航过程中,潜艇变化的漂角相当于水翼的攻角,此时艇体受到一个升力Yvv,潜艇前体和后体的升力方向一致,都是指向v的负方向,因此总的侧向力Y是一个较大的负值,Yv′也是一个较大的负值。水动力矩由于前体和后体的首尾作用相抵消,其绝对值并不会很大。在水动力中心形成之前,潜艇的前体首部作用同后体尾部作用相比占优,因此Nv是一个较小的负值,此时偏航力矩Nvv有使漂角增大的趋势。垂直面的斜航过程中,垂向力Z的变化趋势和原理同水平面一致,而俯仰力矩Mww同水平面相反,是一个正值。这是因为当垂直面出现攻角时,由于围壳指挥台和尾翼的存在使得艇体上下不对称,四个尾翼中的三个均暴露在进流面中,艇体进流面的面积集中到重心以后,像风标一样,此时Mww从负值变成正值。并且当垂直面出现攻角时,在Mww的作用下,有使攻角减小的趋势。
4.2 涡结构
潜艇在粘性流体中运动时的涡系如图10所示。

图10 潜艇涡系
图10详细展示了潜艇在粘性流体中运动时涡的形成与脱落。由图10可以看出,艇体本身产生的涡最为剧烈,经历形成、发展、附着和脱落等历程后,在艇体后方形成复杂的涡量场。主艇体的进流段和去流段均有一层厚厚的附着涡,平行中体处会发生交错分布的涡脱落。指挥台围壳和尾翼与主艇体的接触部分均会产生马蹄涡。由于附体背流一侧发生了流动的分离,主艇体和指挥台的背流面会在围壳根部形成结合涡,这种结合涡会和马蹄涡沿艇长方向的延伸涡形成项链状涡对。该涡对在向艇后延伸的过程中会和艇体去流段处产生的涡结合并形成一个涡鼓包。潜艇在粘性流体中运动时,流体会受到指挥台围壳和尾翼等障碍物的阻碍作用,从而流速降低,产生下游压力大,上游压力小的逆压梯度,当这种逆压梯度大到一定程度时,流体原来的运动不仅会被停止,而且会在逆压梯度的作用下向指挥台围壳和尾翼的上游(反方向)运动,从而在靠近围壳等障碍物根部附近的地面角区形成沿着围壳进流面根部周向分布的流动分离的涡旋,阻碍了流体进入围壳和尾翼的根部区域。由于这种涡旋的涡面形状类似于弯曲的马蹄铁形状,因此被称为马蹄涡。这就是潜艇马蹄涡系形成过程和原因。
围壳顶端和后缘的尾涡也呈现项链形状,与艇体的项链涡对不同的是,围壳顶端的项链涡更为粗大,受漂角变化和流动分离的影响更明显。尾翼与主艇体产生的马蹄涡会沿着艇体向后延伸,其随边下游也会出现尾涡。尾翼附体的马蹄涡和尾翼随边下游的尾涡之间的相互影响会一直持续到桨盘面处,并且在桨盘面处发生涡量汇集,从而使螺旋桨持续工作在附体尾涡的非均匀流场中。同时,在尾翼端面和尾缘上方处也会诱导产生附着涡蹄。
4.3 不同漂角对流场结构的影响
以水平面的斜航运动为例,选取0°、2°、6°、10°和14°共计5个漂角,重点研究漂角改变对潜艇和周围流场结构的影响。
图11是5个漂角下的潜艇涡结构示意图。由图11可以看出,在0°和2°的小漂角下,主艇体的平行中段几乎没有附着涡的产生,指挥台围壳顶端和后缘也没有项链涡结构,这说明在小漂角范围下,潜艇附体涡系的变化较为平缓,不会形成大范围的涡系脱离以致大幅改变艇体和尾舵附近流场的流动。随着漂角的增大,主艇体平行中段的附着涡逐渐增多,且围壳项链涡沿艇长方向逐渐拉伸成细条状,潜艇背流面涡系发展、脱离速度明显加快。指挥台围壳和主艇体的接触部分的马蹄涡和结合涡愈发明显,同时尾部的涡系也更加复杂,说明漂角增大对潜艇涡结构带来了不利的影响。

图11 不同漂角下的潜艇涡结构
图12是不同漂角下潜艇在不同截面处的涡量等值线。主艇体平行中段的涡量主要来自指挥台与主艇体接触部分的涡流。由上文可知,指挥台围壳周围以及沿艇长方向的涡量主要由一条项链状的涡对主导,该涡对源自指挥台边界层的翻卷。项链涡沿着艇的平行中段向后延伸,与指挥台围壳的非定常边界层发生了粘性相互作用,并形成了额外的纵向涡流。在指挥台围壳的顶端和后缘,形成了与不稳定船体边界层相互作用的直立侧涡,而项链涡流则在指挥台围壳后缘形成了复杂的不稳定尾流,这也是上文提到的围壳尾涡的形成原因。从小漂角变化到大漂角,围壳后缘的直立侧涡会在流动分离的作用下发生大幅度侧斜,并与尾舵产生的涡流逐渐融合。由于项链涡流迫使流体从围壳向外流向主艇体,因此它可能在艇体后缘附近,在艇体曲率和两个涡流系统(项链涡流和直立侧涡流)的联合作用下向艇体传递高动量流,从而产生艇体的不稳定性,同时造成分离和碰撞。随着项链涡进一步向艇后发展,它会部分失去其连贯性,并有朝艇体展平的趋势。在这个过程中,它与弯曲增厚的艇体边界层相互作用,产生了一个非常复杂的近壁流场。大漂角斜航下,艇体周围的复杂流动导致了横跨艇体的动量传输,从而影响了艇体边界层中的速度和湍流应力分布。

图12 不同漂角下的涡量等值线
尾翼下游尾涡片中的涡量主要来源于沿着尾翼表面的边界层。潜艇尾翼后面的尾涡片将会引起诱导压阻力,这种诱导压阻力是一种三维流动效应,它将随着尾翼展弦比的减小而增大。尾翼产生的涡流会在艇体后方持续存在,但不与其它涡流相互作用,而且该涡流会在螺旋桨上方通过。
图13是不同漂角下潜艇桨盘面处(x/Loa=0.978)的速度等值线图。直航状态(0°漂角)下,桨盘面处的速度沿桨轴周向均匀分布,由内向外速度线性增大。周向上的速度有一个范围较大的等值区,该等值区向内会有一个骤降现象,这是由于艇体的外形从平行中体收缩到后体造成的。平行中体的速度等值线上方有一个由围壳指挥台引起的速度突起,随着漂角的增大(从艇后向前看为右漂),该速度突起同样会向右移动,同时由围壳指挥台引起的项链涡会使中心处的速度降低。四个呈十字分布的尾翼在桨盘面处引起的速度等值线同样呈十字分布,且漂角越大,该现象越明显。大漂角范围下右尾翼处的速度等值线先是向桨轴处收缩,呈现牛角状,然后逐渐汇拢,并与围壳指挥台引起的速度突起融合。由图12可知,大漂角斜航下,横跨艇体的动量传输影响了艇体边界层中的速度,在图13中具体体现为:桨盘面处边界层中的速度跃升,且漂角范围内速度分布十分不均,不利于螺旋桨的工作。

图13 不同漂角下桨盘面的速度等值线图
5 结论
静态重叠网格法计算得到的位置导数与试验相比误差在允许范围之内,满足工程应用需求。
在±4°的小漂角范围内,潜艇所受的力和力矩基本上呈线性分布,随着漂角的增大,力和力矩之间的非线性增大。
在小漂角范围下,潜艇附体涡系的变化较为平缓,不会形成大范围的涡系脱离以致大幅改变艇体和尾舵附近流场的流动;随着漂角的增大,潜艇背流面涡系发展、脱离速度明显加快。指挥台围壳和主艇体的接触部分的马蹄涡和结合涡愈发明显,同时尾部的涡系也更加复杂,说明漂角增大对潜艇涡结构带来了不利的影响。
大漂角斜航下,横跨艇体的动量传输影响了艇体边界层中的速度;桨盘面处边界层中的速度跃升,且漂角范围内速度分布十分不均,不利于螺旋桨的工作。
直航状态(0°漂角)下,桨盘面处的速度沿桨轴周向均匀分布,由内向外速度线性增大;大漂角范围下右尾翼处的速度等值线先是向桨轴处收缩,呈现牛角状,然后逐渐汇拢,并与围壳指挥台引起的速度突起融合。