智能平流层浮空器Loon 关键技术分析与仿真
2023-06-27邓小龙杨希祥朱炳杰麻震宇侯中喜
邓小龙,杨希祥,朱炳杰,麻震宇,侯中喜
国防科技大学 空天科学学院,长沙 410073
临近空间介于传统航空空间和航天空间之间,是人类活动的新空间和国家安全的新疆域[1]。临近空间蕴藏着高高空长航时信息服务、远程机动快速投送以及上可制天、下可制空/制地/制海/制信息等巨大军事、民用战略价值,已成为国际战略竞争前沿[2]。
平流层浮空器是目前开展临近空间研究与应用的重要平台载体,具有驻空时间长、载荷能力强、飞行高度高、使用效费比高等显著优点,相较于航空平台和航天平台,在时间分辨率和空间分辨率上具有显著优势,在网络通信、遥感遥测、科学研究、态势感知等领域有巨大的应用能力[3-4]。平流层浮空器主要包括平流层飞艇和高空气球。平流层飞艇通常采用流线型外形设计,依靠太阳电池和储能电池构成的循环能源驱动推进系统,在设计高度上进行定点飞行、区域驻留,平流层飞艇系统庞大复杂、设计难度高,面临囊体、能源、控制等关键技术与核心问题,目前仍有待进一步的技术攻关验证。法国Thales 公司的Stratobus 平流层巴士和美国Sceye 公司的HAPS 平流层飞艇是国外公开在研的典型长航时飞艇项目[5-7]。高空气球是一类无动力平流层浮空器,其运动取决于所处的风场环境,根据内外压差大小可分为零压气球和超压气球2 大类[8]。作为开展临近空间科学研究与技术验证的最主要平台,高空气球的主要研究机构有美国NASA、日本JAXA、法国CNES、瑞典SSC 等,其最大搭载能力超过3 t,最大飞行高度超过50 km,最长飞行时长超过300 天[9-11]。
研究发现,平流层风速和风向随着海拔变化而变化,且存在较规律性的准零风层[12]。针对此规律,人们在高空气球技术方案基础上,创新性地提出了基于风场环境利用的平流层浮空器系统,其基本思想是通过气球对不同高度风层中的风速和风向进行合理利用,实现气球平台的区域驻留或飞行轨迹规划[13]。这种通过简单系统组成、小型平台规模、低制造和使用成本的技术途径,颠覆传统高空气球在应用能力方面的不足和平流层飞艇对共性技术的严苛要求,已成为近年来航空航天的前沿研究领域[14-16]。事实上,由于基于风场利用的浮空器具有的持久驻空能力、飞行轨迹可控能力和高可靠性,其在行星探测方面也表现出巨大的应用前景。例如,美国JPL 实验室的Hall 等通过分析金星和泰坦星球的环境特点,对比研究了多种高度调控机制的浮空探测器方案,并结合动力学仿真分析了浮空器的动态部署过程[17]。
相较于高空气球和平流层飞艇,基于风场环境利用的平流层浮空器也需要克服与其工作原理相关的特有的关键技术[18]。例如,在风场利用方面,人们提出了多种途径来开展平流层浮空器对不同风层的利用,如调节囊体中压舱空气量[19]、压缩调节浮力体的体积[20-21]、内置超压储气调节[22-23]、气动舵面牵引[24-25]、串联多气球系统[26-27]等。这些创新性研究使得此类新型平流层浮空器成为前沿研究领域,催生了World View、STRATACUS、Space Perspective、Loon 等创新项目的实施[3,28]。其中,Loon 气球项目通过调节囊体中压舱空气量进行平台高度调控,在技术创新和应用探索方面取得大量前瞻性和突破性进展,对于新型平流层浮空器技术研究具有重要参考价值[29-31]。
事实上,Loon 气球作为基于风场利用的平流层浮空器典型项目,其在系统设计、控制方法、风场利用等方面进行了大量的创新性、系统性、深入性的研究,并开展了充分的实践探索,在技术上证实了基于风场利用的平流层浮空器的可行性和先进性。因此,对Loon 气球技术方案进行研究和分析,将为此类飞行器的设计和应用提供重要的支撑。
本文首先对Loon 气球的项目概况及实践探索进行总结分析,然后对囊体材料与结构、高度调控、能源与推进、安控回收、风场建模、自主控制等核心关键技术进行了深入的讨论分析,在此基础上,对事关总体方案可行性的总体参数、超热超压、气体泄漏、能源平衡、轨迹规划等进行仿真分析,提出发展启示与建议,为基于风场利用的新型平流层浮空器发展、论证、设计、试验、应用等研究提供参考借鉴。
1 Loon 气球项目概况
Loon 气球项目于2013 年正式提出,由谷歌X 实验室负责,致力于通过高空气球设计、研制、试验技术及其控制方法,开拓高空通信技术,在世界范围内提供稳定可靠的平流层网络信息服务[32]。Loon 气球的研究工作主要涉及航空、通信和人工智能等领域。
Loon 气球通常以多个气球编队的方式实现对地面区域持续网络覆盖。图1(a)所示为Loon气球的网络架构,其包括多个Loon 气球,通过气球搭载载荷之间的相互通讯组建平流层网络,通过载荷与地面装置之间进行网络互通,实现地面用户的网络接入。这种基于平流层飞行平台的网络一方面可与现有的地面网络系统共存,拓展传统地面网络覆盖范围;另一方面可极大地增强通信网络在自然灾害和应急事件中的弹性应对能力。图1(b)所示为Loon 气球的工作原理。由图可知,有别于常规超压气球的定高飞行和零压气球的高度波动飞行,Loon 气球基于对风场环境的分析,主动调节飞行高度,通过利用不同高度风速风向的差异,实现其飞行轨迹的规划和控制。
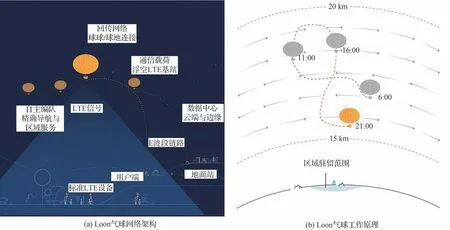
图1 Loon 气球网络与工作原理Fig.1 Network and principal of Loon balloons
2014 年,Loon 气球成功实现了平流层与地面之间的LTE 互通验证;2015 年,研制了气球的自动发放系统,可自动实现30 min 内完成充气、提升、放飞等流程;2017 年,正式开始商业应用探索,与Telefonica 公司和秘鲁政府合作,采用Nokia 的LTE 技术为该国受洪灾地区提供网络服务,随后为波多黎各受飓风灾害地区提供通信服务;2019 年,谷歌与软银的HAPSMobile 公司合作研制通用的平流层通信载荷,以探索其在平流层飞艇和高空太阳能飞机上的使用,此时Loon气球累计完成平流层飞行100×104h,累计飞行距离7 000×104km;2020 年,Loon 气球开始为肯尼亚提供大范围覆盖的商用网络服务,同年与HAPSMobil 发起共建高空平台通信联盟(High Altitude Platform Station Alliance,HAPS Alliance),其涵盖了世界上的电信、航天、教育及政府机构,目的是促进平流层飞行器的使用与应用,建立HAPS 生态,制定HAPS 网络互操作性的标准化[33];2021 年,由于商业利润受限原因,暂停了Loon 项目;随后,持续参与该项目的美国Raven Aerostar 公司收购了Loon 项目的知识产权,并专注于平流层浮空器平台的军事应用能力验证。
表1 为Loon 气球项目启动以来主要型号的部分参数。可以看出,其系统组成、技术体制、设计参数等被多次修改调整,同时飞行性能也大幅提升。具体表现为,气体体积逐渐增大,系统总质量逐渐增大,平均驻空能力大幅增加,气球的副气囊构型多次调整。例如,项目初期Lark 系列气球体积约为750 m3,采用隔膜式副气囊设计,高度调控范围约为2 km,平均驻空时长为13 天。随着项目推进,谷歌在材料、工艺、系统组成等方面进行了大量改进,并且不断改进副气囊方案,对于最新研制的Quail 系列,气球体积增加至2 760 m3,高度调控范围约4 km,平均驻空时长大于240 天。
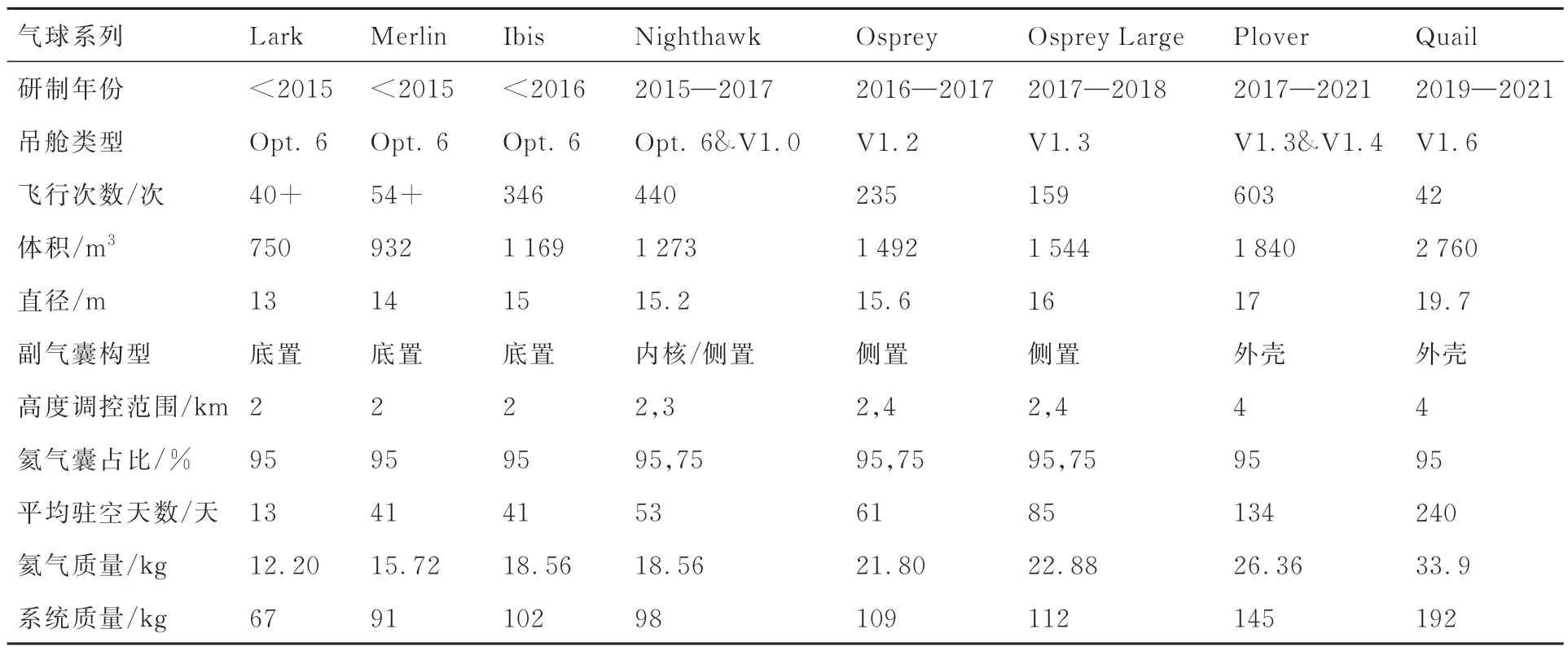
表1 Loon 气球各系列的主要参数Table 1 Main parameters of series of Loon balloons
Loon 气球的Quail 系列平台组成如图2 所示,其主要包括球体、吊舱和载荷3 部分。球体部分主要包括主气囊、副气囊以及高度调节系统(Altitude Control System, ACS)。其中,主气囊采用超压体制,副气囊采用零压体制,高度调节系统位于底部,采用气泵和阀门组合。球体部分主要作用是为平台提供驻空所需要的浮力,并根据任务要求压入或排入空气,进而实现对气球平台驻空高度的调控。吊舱部分主要包括吊舱结构、航电、能源、回收及推进等分系统。载荷部分主要包括用于气球与地面的LTE 设备和气球与气球的通信设备。

图2 Loon 气球系统组成Fig.2 Components of a Loon balloon
2 关键技术分析
对于在环境恶劣的平流层进行持久飞行的Loon 气球,具备如百天量级的长航时驻空、快速抵达服务区域的导航、持久区域驻留和气球平台编队组网等应用能力,其在总体设计、共性技术和试验保障等方面均面临诸多技术挑战。为此,针对Loon 气球在材料、结构、高度调控、能源、推进、回收、风场、导航等诸多方面开展了大量研究。
2.1 材料与结构
2.1.1 球体结构
在驻空飞行阶段,Loon 气球的主囊体始终与外界大气之间维持一定的压力差,即超压。这使得气球在平飞时能维持总体积和外形,进而保持其飞行高度。Loon 气球的主囊体采用南瓜形超压充气结构,这也是高空气球性能得以突破的新技术。Loon 主要与Raven Aerostar 公司进行超压气球的生产合作,该公司是美国主要的浮空器研制生产单位,长期为美国军方提供浮空器装备。
如图2 所示,南瓜型超压充气结构的基本思路是采用3D 囊瓣,相邻2 根加强筋通过小曲率半径的薄膜球膜连接,球膜环向应力仅与局部曲率半径相关,经向张力传递给加强筋,因此薄膜张力与囊体整体尺寸无关,从而大大降低对薄膜材料力学性能的要求,保证了囊体的耐压性能;同时,对囊瓣采用恒定环向曲率半径设计,使得沿经向的环向应力处处相等,充分利用薄膜的力学性能。在指定超压量的气球结构设计中,主要设计变量有囊瓣数量、囊瓣几何外形、囊瓣与加强筋的长度差、囊瓣与加强筋的粘着点数量等。
超压气球结构中,在超压作用下球体的经向力由加强筋承担。超压气球的压差和温度在昼夜发生变化,由于加强筋与球膜的材料力学参数不同,受力不同,二者变形将不同,进而在加强筋和球膜之间产生复杂的非线性接触力学问题。事实上,如何通过球体设计、加强筋和球膜力学参数的匹配、加工工艺设计来降低加强筋和球膜之间的应力集中是超压控制的难点。对于Loon气球,加强筋的长度变化量远大于球膜材料,二者之间的长度差控制在3%~7%。
为了调节驻空高度,Loon 采用二元气球体制,即用2 个气室分别装空气和氦气,氦气用于提供浮升力,空气作为压舱物。如图3 所示,针对囊体的质量效率比、高度调控范围、成本和防泄漏需求,根据空气囊位置及布局特点,谷歌先后设计了4 种不同的气球构型,分别为底置式、侧置式、内核式、外壳式。其中,底置式是最常用的布局,通过赤道附近的横向隔膜将空气和氦气分开为上下2 个气室;侧置式通过纵向隔膜将空气和氦气分开为左右2 个气室;内核式采用内置的球状空气囊;外壳式采用内置的球状氦气囊。外壳式设计的质量利用率较低,但是由于氦气填充在零压内置气囊中,使得囊体及焊接带的氦气泄漏率极低,有助于进一步提升气球的驻空时间,成为Loon 气球实现百天以上长航时的关键。
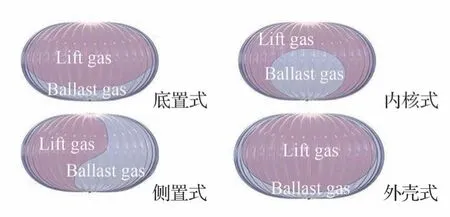
图3 Loon 气球结构构型Fig.3 Structure architecture of Loon balloons
2.1.2 材料与工艺
囊体材料性质是气球持久驻空性能的决定性因素。一方面,材料应具有较好的抗拉伸性能,承受囊体超压带来的应力,该应力的大小由于昼夜交替和高度调控而呈现出交替变化;另一方面,材料应能较好地抵抗循环的热、紫外等应力带来的性能退化。
Loon 气球囊体采用聚乙烯(PE)薄膜材料制作,通过对不同PE 材料进行大量测试,最终选定厚度为38.1 μm 的定制吹制PE 材料,其内部命名为PE01 材料。相较于常规PE 材料,这种交联、取向的PE01 聚乙烯材料具备更高强度和抗老化能力。同时,PE01 材料还提升了光学透明度,进而降低工作温度和材料性能退化。此外,Quail系列单个气球的焊接带总长度达到3.5 km,维持气球焊接加工的高质量和一致性十分关键。
加强筋是超压球体耐受大超压量的主要承力部件,沿主囊体外表面经线方向均匀分布,通过法兰盘在气球顶部和底部汇集,用于维持主气囊曲线外形并承受主要的经向载荷,可显著降低主囊体经向应力,提高主囊体耐差压能力。Loon气球的加强筋采用编织超高分子聚乙烯(UHMWPE),每根加强筋可承受1 000 kg 以上的拉力。
为了提高囊体制造的容错能力和可靠性,针对气球囊体及其材料的测试项目包括扫描厚度、拉伸测试、鼓泡试验、耐揉搓测试、低温测试、囊体耐压测试等。同时,还开展Loon 气球的副气囊循环充放气试验。
针对加工过程的材料优选和失效试验后的材料分析,谷歌研制了2.4 m×24 m 的大型平板扫描仪,其通过采用极化玻璃背透的方式对单个幅瓣进行自动的高分辨率扫描、查看、标记、测量和数据处理,可辨识应力、失效点等重要特征。该设备还用于长时飞行试验后的材料失效与性能退化的检测分析。
2.2 高度调控系统
Loon 气球的高度调控系统位于主气囊的底部,主要包括压缩机和阀门,用于将空气压入气球或排出气球,是气球进行风场利用的关键设备。为了将空气压入超压气球,使用电动涡轮机来进行压缩,如图4 所示。
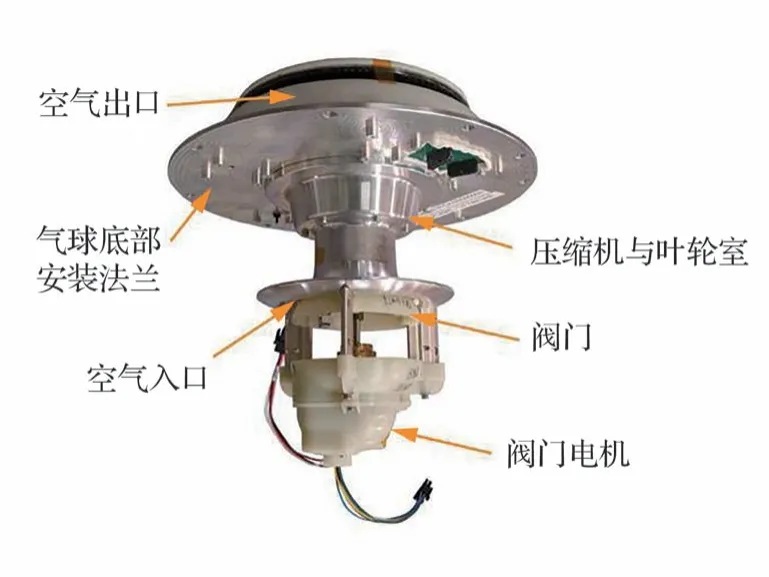
图4 压缩机组成示意图Fig.4 Schematic of compressor components
高频次、长寿命、高可靠是高度调控系统面临的主要挑战,通常Loon 气球的压缩机运行次数>6 000 次,阀门工作次数>12 000 次,压缩机工作时长>1 000 h。在设计时,应充分权衡效率、质量流量、可靠性的要求。Loon 气球的高度调控系统是基于轮子动力学开展涡轮叶轮进行设计,采用高质量有限元网格和准确定边界层条件,并在模型中考虑流动分离。针对其不同工作条件,涡轮的运行速度范围较宽,因此还应分析多工况下的效率。
电动涡轮机中部件材料的热膨胀特性存在差异,由此产生的不匹配将导致轴承系统的过载和欠载,进而影响高速旋转部件的寿命。为此,谷歌提出了被动热补偿轴承预紧方案,对轴承沿热变化方向进行预加载。在压缩机部件制造后,还针对性地开展部件的加速计振动分析,用于缺陷筛选。
高度调控系统作为Loon 气球正常工作的核心部件,对其工作状态监测十分重要。为此,谷歌提出了基于机器学习的无传感器在线寿命预测方法,建立了3 节点k折机器学习模型,具有多传感器输入,针对性能良好的涡轮机和后期故障进行训练。该预测模型在气球平台上本地运行,通过监测系统与模型输出的偏差,判断是否将出现故障。
2.3 能源与推进
2.3.1 能源系统
Loon 气球的能源系统主要包括太阳电池、储能电池、能源管理与配电等,用于为各用电设备供能,其中,高度调控系统和载荷系统是用电最多的设备。对能源系统设计有重要影响的参数包括储能电池的能量密度、太阳电池的功率密度、自主导航系统效率等。表2 为在不同类型吊舱中采用发电与储能设备的主要参数。
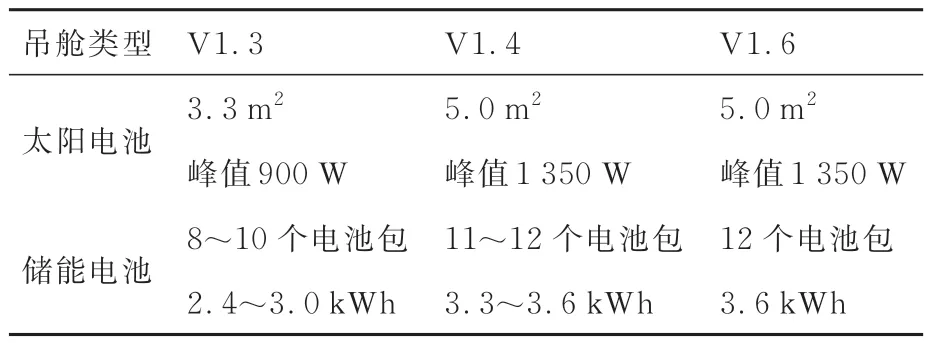
表2 发电与储能设备参数Table 2 Parameters of power generation and storage devices
储能电池采用18650 型号的锂离子电池,后计划改用21700 型电池以提高能量密度。电池包采用12 串2 并的连接方式,多个电池包采用并联方式供电,供电电压为36~50.4 V。同时,Loon气球采用工作在常规温度范围的锂电池,实时监控其温度,并控制其环境温度在15 ℃附近。
Loon 气球采用单晶硅太阳电池,后期型号太阳电池阵面积为5.0 m2,采用6 块太阳电池组件,各组件由49 个单体连接,优化封闭工艺降低面密度,同时研制了X 型结构加强设计以确保在转运和飞行中不会弯曲或破损。太阳电池阵通过MPPT 与储能电池组连接,使得太阳电池始终工作在最大功率点处。
高空气球在飞行时受外界环境和内部对流影响一般会持续旋转,并带动吊舱随之单方向较稳定的旋转[34]。安装在吊舱上的太阳电池将同吊舱转动,进而缩短太阳电池的光照时长,降低发电性能。为此,谷歌研究了方位角测定与控制方法,通过2 个太阳辐照传感器和双天线GPS 接收机测定太阳位置,通过步进电机与谐波减速器对气球和吊舱旋转进行解耦,并对吊舱设备的方位进行调整,同时使用滑环进行电信号和功率传输。
2.3.2 推进系统
为了进一步提升操纵性能,Loon 气球研究了电机螺旋桨的侧推方案,提供1~3 m/s 的推进能力,用于减小不利风场的影响或提高其到达有利风场的能力,同时还能增加气球的对流换热。图5为Loon 气球推进系统设计图。
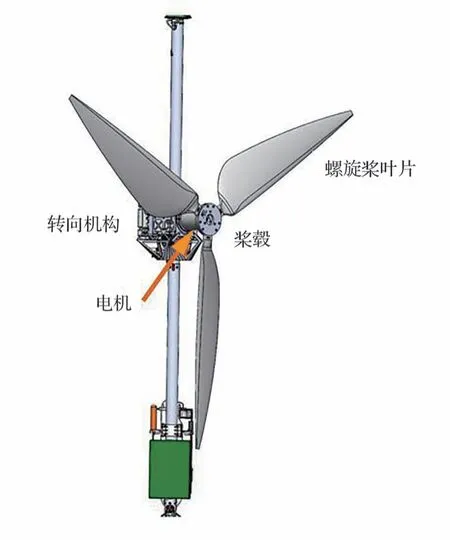
图5 Loon 气球推进系统Fig.5 Propulsion system of Loon balloons
推进系统安装在气球和吊舱之间的硬制连接杆上,主要包括动力电机、螺旋桨、转向机构、制动机构等。为提高驱动效率和扭矩,推进系统采用直驱方案。动力电机为无刷直流电机,可在一定的高度和功率区间高效运行,其工作点效率约为90%。螺旋桨为2 m 直径的3 叶桨,包含3 个桨叶和1 个桨毂,并对螺旋桨的振动、强度和老化特性进行了相应的优化。转向机构采用步进电机驱动蜗轮传动,用于使螺旋桨产生指定方向的推力。制动机构采用契形刹车片设计,用于阻止气球系统快速下降时螺旋桨的自旋转,消除动力电机可能产生的过电压和动力系统故障。
2.4 安控回收
安控回收是平流层浮空器的一项关键技术,Loon 气球的回收方式与常规高空气球不同。Loon 气球终止任务后的系统安全、下降和回收主要通过飞行终止系统和伞降系统共同完成。
飞行终止系统安装在气球顶部,其根据飞行终止指令要求,通过旋转切割器产生放气窗口排放氦气。该系统可产生3 种大小的放气窗口,对应快速、慢速和极慢速下降。伞降系统包括球舱分离设备、气球降落伞、吊舱降落伞等,用于对气球和吊舱分别进行回收。
Loon 气球对计划着陆、意外终止和快速失压3 种场景分别设置了对应的安控回收方案,主要差异在于安控流程、分离高度设置等。以计划着陆为例,其工作流程如图6 所示:①确定落区,设置分离高度;②启动飞行终止系统,气球开始下降;③在低空分离高度(一般约3 000 m)触发球舱分离设备,气球与吊舱分离;④吊舱下降稳定后,依次打开引导伞和吊舱主伞;⑤气球内气体排放充分后,从气球底部依次打开引导伞和气球主伞;⑥吊舱和气球落地后,均与降落伞分离。
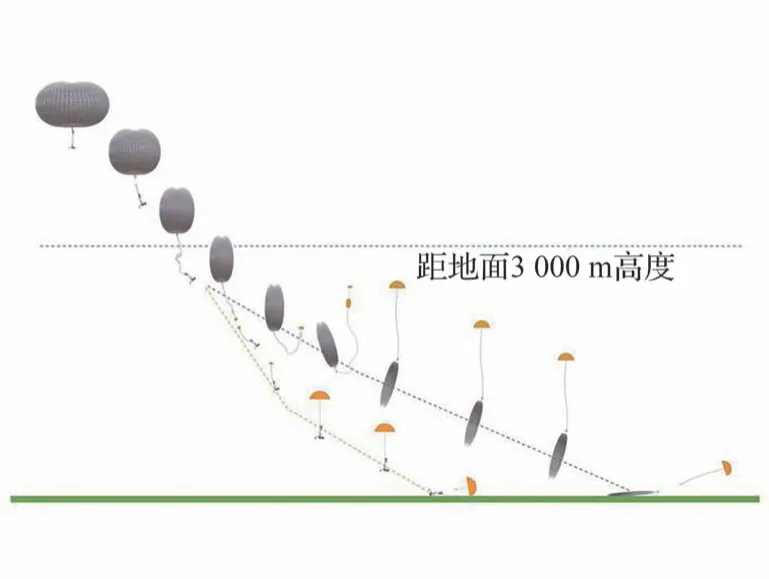
图6 Loon 气球的计划着陆下降流程Fig.6 Descent stages of Loon planned landing
2.5 风场建模
风场预报与建模数据的准确性是Loon 气球开展自主飞行决策和仿真分析的重要前提,其应用了直接观测数据、中长期预报数据、历史再分析数据和临近预报数据等多源气象数据。表3 为Loon 气球飞行中使用的实时数据,主要包括预报数据和观测数据,具体包括高分辨率欧洲中长期天气预报(ECMWF HRES)、美国海洋和大气管理局全球预报(NOAA GFS)、美国国家大气研究中心灾害天气预报(NCAR/BCI)、Loon 观测数据等,各预报数据及观测数据的要素、分辨率、更新频次均不一样。在历史再分析数据方面,谷歌主要使用了上述气象预报部门对1980—2021 年仿真与再分析的全球环境数据集。

表3 Loon 气球自主飞行所用的实时数据源Table 3 Real-time data sources for autonomous navigation of Loon balloons
在Loon 气球的实际飞行时,需要融合网格化的预报数据和稀疏的观测数据,类似于数值天气预报中的数据同化方法。其中,气球观测数据权值的大小与其距离采样点和采样时间成反比。同时,风场建模软件还估算风场的置信度,从距离观测点更近的高置信度降低至距离观测点更远的低置信度,得到的置信值可用于高度调控算法的探索任务。为提高中长期预报精度,研究了基于历史数据的相似集合预报方法。该方法可通过基于历史数据对集合预报进行订正,有效降低预报误差[35]。结果发现,针对ECMWF 预报数据,其风速和风向的预报误差分别降低了12%和20%,可通过分布式计算和深度神经网络提高相似集合预报的运行速度。
对Loon 气球及其编队飞行的仿真分析主要基于ECMWF ERA5 等大气再分析数据集。需要注意,再分析数据集是指利用数据同化系统将各种观测资料和数值天气预报产品进行融合并得到的最优集成,获得稳定、无一且精确的长序列历史分析产品。但是,生成再分析数据时可使用的平流层观测数据非常有限,导致该高度范围的再分析数据准确性欠佳。因此,在开展Loon气球全球范围可达性时,再分析数据并不能较准确地提供各地平流层风场结构特征。此外,由于再分析数据相对较平滑,在仿真分析中,Loon 气球通过添加风场噪声的方式来增加风速和风向的高频特征,分析其对调控算法的影响。
2.6 自主导航与控制
Loon 气球通过编队导航系统实现自主利用风场抵达指定区域、与编队中其他气球协同工作等目标,该系统从底部到顶部的3 层功能架构为:区域操纵控制系统Steering Controller、长程导航系统 Cartographer 和编队规划系统 Dispatch。
2.6.1 区域操纵控制系统
区域操纵控制系统根据区域风场模型,决策单个气球实现区域驻留(位置目标)或100 km左右近距离轨迹规划(方向目标)时的风层利用方案或推进系统工作方案。系统的输入包括遥测数据、区域风场和目标(位置目标或方向目标),输出为气球高度调控的指令。该系统面临的主要挑战和解决思路:①平流层预报误差大,严重影响控制规划的确定性,需利用机器学习中探索和利用策略对气球可达范围的风层进行研究并更新数据库;②高度调控速度有限,影响其敏捷性和风场利用能力,可在总体设计中提升高度调控系统能力;③升降过程的耗时和耗能差异大,控制器设计时应分别考虑;④气球下方的强对流天气可能对气球系统带来扰动或放电过程,或者一些区域禁止穿行,应在规划中设置禁飞区;⑤区域控制最优方案随着Loon 气球与目标距离的变化而改变,当距离较远时应倾向于朝向目标的更快风场,而较近时则倾向于较慢风场。
Loon 气球的区域操纵控制系统先后经历了树搜索算法和深度强化学习算法。树搜索是一种近邻搜索算法,通过探索气球所有可行的运动序列,并对各序列仿真和打分。早期,Loon 气球使用树搜索算法发现,由于该算法的最优性和确定性特征,使得其难以考虑风场环境的不确定因素影响,存在控制健壮性不足。而且,随着搜索域的增加,树搜索算法的计算量将指数增加,难以面向更长的时间和更大的区域范围。随后,对树搜索算法进行改进,考虑期望风向误差、期望风向置信值、期望风速误差和期望风速置信度,构建搜索期望函数对气球可达高度进行排序。当气球离目标区域较远时,以风向为主导,靠近后以风速为主导。
各高度的期望值由式(1)期望函数确定:
式中:C(x)为风场的置信度,取值0~1;G(x)为优度,代表风场对于导向目标的可用性,取值0~1;x为高度;ε与k为常数。
在式(1)中,等号右侧第1 项用于鼓励探索,当某些高度处风场置信度低时,将鼓励气球访问k期望的高度层;第2 项用于鼓励利用,当置信度高时,将对风场赋予更大的优度。参数ε与k用于平衡探索与应用。
为了避免过多、过大的高度调节指令,对期望函数改为
式中:等号第3 项为高度调节惩罚项;x0为当前高度;a1和a2为常数。
之后,谷歌开始使用深度强化学习算法训练各种场景条件下的操纵控制器[29]。对于区域驻留问题,针对优化目标,引入奖励值r,当球在驻留点50 km 以内时取r=1。奖励值与在t时刻的气球状态st相关,并由对动作at(上升、下降或停留)的响应来提供。最优控制器是对未来奖励的期望折扣总和的最大化,或者称之为“回报”:
式中:Rs表征飞行控制器从初始状态开始的长期值;Ε为期望值;γ为折扣因子。
通过引入机器学习,Loon 气球不仅优化了其飞行轨迹和能源消耗,还大幅提升应对复杂环境、复杂应用场景的能力。
2.6.2 长程导航系统
长程导航系统用于Loon 气球的远距离飞行航迹规划,其根据全球中长期风场环境,生成全球范围内面向特定目标的导航图,为区域操纵控制系统提供指令输入。
根据任务类型,长程导航系统可生成2 种类型的导航图:快速抵达导航图(ASAP)和指定时间抵达图(AT)。快速抵达导航图中每个位置点的数值对应于从该点到达目标区域所需的时间。区域操纵控制系统在此基础上,判断当前点及周边区域各点的差异,选择最快可达目标的周边点,然后通过区域操纵控制系统调节气球的工作高度,进而飞行至指令的周边点。指定时间抵达图上每个位置点的值对应于该点在规定时间窗口内到达目标区域的概率。长程导航系统在工作中加入禁飞区的设置,确保在远距离规划方面的安全性。Loon 气球实际飞行时,在获得风场预报数据更新后,长程导航系统将重新计算生成新的快速抵达导航图和指定时间抵达图。
快速抵达导航图主要通过2 步来生成:一是产生地图各位置点处Loon 气球从某个时间t到下一时间t+1 的飞行轨迹的链图,时间步长为预报系统提供新预报产品的间隔(一般为6 h)。也就是说,链图是通过对气球在各高度层飘飞6 h的系列化仿真计算得到。二是通过反推迭代的方法计算每个点的到达时间,即基于长期预报数据(10 或15 天),从目标区域周边开始,计算出可在一个时间步长内到达目标的位置点,然后反复迭代计算直至当前时间。当Loon 气球无法在长期预报时效(10 或15 天)到达目标区域,则需要利用每6 h 的全球再分析数据进行计算。
指定时间抵达图的生成仅利用预报数据,其结果表征为特定时间窗口内到达目标的概率,用气球在未来10 天内在特定时间到达目的地,这也是气球编队进行任务分配的重要基础。
2.6.3 编队规划系统
编队规划系统针对任务区域持续覆盖的要求,根据气球编队中各单元的位置及风场情况,确定各Loon 气球的任务目标及时间窗口。同时,其负责的任务还包括:①当任务区域的风向单一,气球难以维持区域驻留时,为了实现目标区域的持续覆盖,则规划Loon 气球以一定的间隔依次飞抵目标点;②当Loon 气球存在载荷类型差异、任务目标差异、服务类型差异时,则应根据各气球平台特点进行分别规划;③针对短期情况进行规划,如临时增加的禁飞区、科学或工程测试等。
编队规划系统根据不同的载荷配置和商业目的对Loon 气球进行分组。当一些气球可满足多类目标时,基于任务优选级、时间与区域要求等,通过编队规划系统内的拍卖方式进行任务分配。对于接近飞行寿命的气球,编队规划系统设置了管理流程,通过设置等待区、着陆区和回收任务等进行气球的终止规划。
3 方案仿真分析
3.1 总体参数
基于Loon 气球公开的基本参数和系统构成,对其总体设计参数进行分析。对于Quail 系列的气球,其基本参数包括:气球总体积为2 760 m3,最大直径为19.7 m,高度调控能力为4 km,高度调控范围为16~20 km,平台重量为192 kg,单晶硅太阳电池阵面积为5.0 m2,锂离子储能电池能量为3.6 kWh。
本文应用的环境参数为美国标准大气模式(US standard atmosphere 1976,USSA-1976)[36],高度20 km 和16 km 对应的主要参数如表4 所示。Loon 气球在20 km 驻空高度处,所受总浮力为
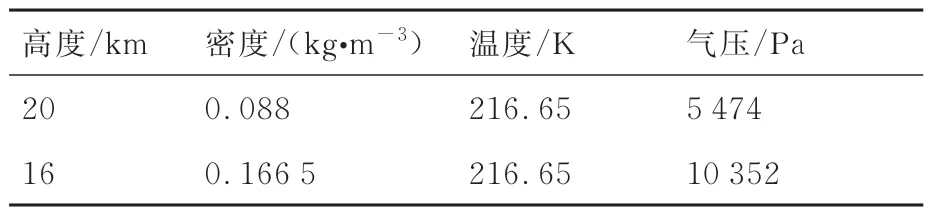
表4 Loon 气球设计工作高度大气参数Table 4 Atmospheric parameters at design altitudes of Loon balloons
式中:ρenv为驻空高度处大气密度;Vhull为驻空时浮空器的总体积。
在正常平飞状态下,主囊体会维持一定的内外压差,参考超压气球的分析结论将夜间基础超压取值150 Pa,夜间基础超热取值5 K[37]。20 km高度时氦气的体积占比为95%,根据理想气体状态方程,可分别计算20 km 驻空高度处气球内氦气与空气的重量:
式中:ΔP为驻空时球体的超压量;VHe为气体内氦气体积;RHe为氦气常数;THe为气体内氦气温度;Vair为空气体积;Rair为气体内空气气体常数;Tair为气体内空气温度。
系统总重为平台重量、氦气重量和空气重量之和,为236.2 kg。由此,Loon 气球的浮力余量约为6.7 kg,满足浮重平衡要求。平流层浮空器中浮升气体的泄漏是不可避免的,为增加驻空时长,通常填充或携带额外的氦气作为氦气泄漏的补充[23]。因此,Loon 气球可将部分浮力余量作为额外的氦气填充在球体中。
如2.3 节所述,Loon 气球为了提高其可达性能力,在改进方案中引入了螺旋桨电推进系统。由于不同高度处大气密度差异以及不同高度处气球内空气质量的差异,导致推进系统工作时会使气球出现不同程度的倾斜,改变阻力特性,进而影响推进功率需求。气球的推进功率可由式(7)进行分析:
式中:CD为阻力系数,在分析中将推进导致的气球倾斜等效为阻力系数改变;v为空速。
图7 所示为Quail 系列气球在16、18、20 km高度处推进速度-功率曲线。由图可知,高海拔工作时的推进性能要显著优于低海拔情况。以3 m/s 的推进空速为例,在16、20 km 上所需的推进系统输出功率分别为140、430 W;当系统以5 m/s 的推进空速工作时,在16、20 km 上所需的推进系统输出功率分别为650、2 000 W。工作高度差异对于推进功率的影响主要是由于较低高度工作时球内空气更多,推进导致的气球倾斜角更大,对应的阻力系数更大。
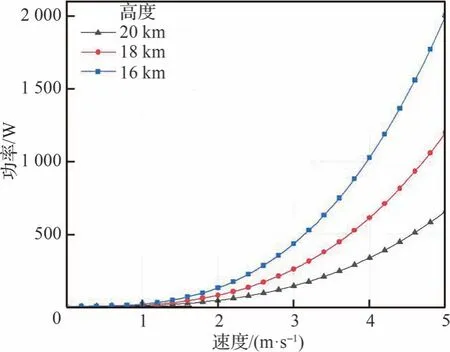
图7 Loon 气球推进空速与功率曲线Fig.7 Speed and power curves of Loon balloons
由此可知,当Loon 气球在不同高度剖面上工作时,在推进和能源方面的约束存在较大差异,进而将对飞行轨迹可达性有不同的影响。例如,同等推进功率情况下,高海拔工作时的可达性将提升,这也为长程导航提供了更大的搜索域。
3.2 超热超压
超热超压是包括高空气球和平流层飞艇在内的所有平流层浮空器持久驻空时面临的一个重要挑战。囊体材料及其内部气体的温度和压力受到太阳辐照、大气环境、地表等因素的影响产生昼夜交替变化的温度与压力,由此形成的应力将对结构安全和气体泄漏产生综合的不利影响[38]。例如,球体内部气体超热会导致超压,可能对充气结构的安全带来风险;囊体材料上温度不均匀分布可产生热疲劳和局部热应力,影响囊体寿命;超热增加浮升气体泄漏速率,影响高度保持能力[39]。
Loon 气球平均驻空时长大于240 天,飞行路径覆盖不同纬度的海洋和陆地环境,必然经历复杂的热环境。本文基于多节点模型开展Loon 气球的驻空热特性分析,对比分析中低纬度的热特性。由于囊体材料的热物性参数并未公开,选取高空气球常用PE 材料的参数值。图8 为气球的热特性分析结果,由图可知,低纬度地区气球的冬至与夏至最大超热量基本接近,昼夜温差约为30 K;高纬度地区气球的冬至与夏至超热特性差异大,夏至时最大昼夜温差约为30 K,冬至时最大昼夜温差约为22 K。对于驻空期间的平流层浮空器,由于内部气体昼夜温度的变化,囊体内的超压量也将随之变化。基于超热分析,可得Loon 气球的最大超压量将大于750 Pa,超压量随着基础压差的增加而增加。
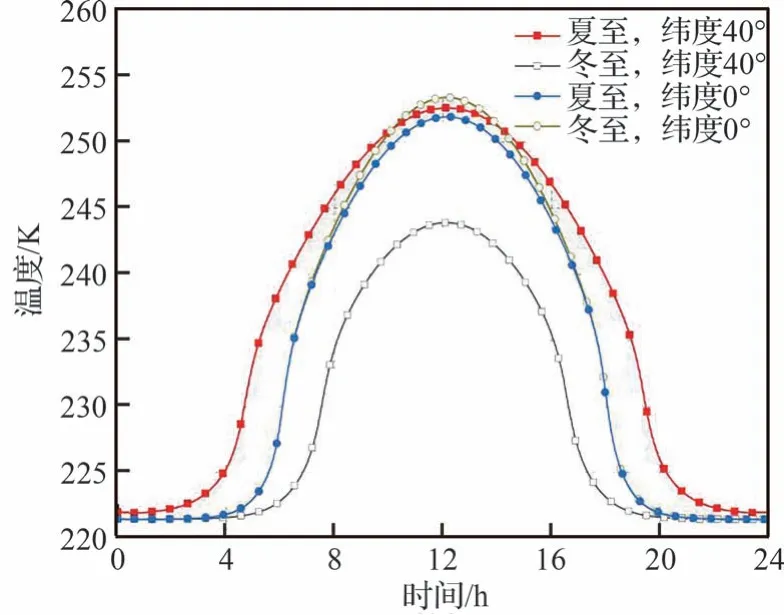
图8 Loon 气球热特性Fig.8 Thermal property of Loon balloons
3.3 气体泄漏
由于材料特性、制作工艺、结构密封等因素影响,浮空器都不可避免地存在氦气泄漏,将直接影响其驻空时长[40]。平流层浮空器一般选用柔性层膜囊体材料,选用分子半径小的氦气作为浮升气体,相比其他气体更容易扩散、渗透。同时,囊体上众多的设备安装开口以及气囊成形过程的热合缝也可能存在渗氦问题。此外,采用超压囊体结构抵抗超热,日间驻空期间的差压较大,也会加剧氦气泄漏。
浮空器的气体泄漏主要包括:材料本体的气体渗透、囊体结构微孔的气体泄漏、囊体破裂情况下发生明显孔洞的气体泄漏。Loon 气球在项目初期重点关注制造工艺与材料本体的改进,在2017 年平均驻空时长突破100 天。为了进一步提升其驻空能力,对球结构上进行了创新,其外壳式构型的平均驻空时长突破了200 天。可以看出,Loon 气球在材料和工艺上取得了长足进展,基本解决了孔洞气体泄漏,并缓解了微孔气体泄漏,驻空能力主要取决于本体的气体渗透特性。
囊体材料本体的气体渗透主要由材料性能和制造工艺决定。气体在致密聚合物膜中的传递过程满足溶解-扩散模型[41]。表示恒定温度下、单位时间内单位面积材料的气体泄漏体积的气体渗透体积流量为
式中:κ为材料本体的气体渗透系数;ΔP为囊体材料内外压差;hm为囊体材料厚度。
下面对比分析内核式、外壳式2 种构型的气体泄漏特性及其驻空影响。图9(a)所示为2 种构型中浮空气体泄漏途径示意,图中粗箭头与细箭头分别表示氦气的主要与次要泄漏途径。左图为内核式构型的Loon 气球,其主气囊填充氦气,氦气主要通过主气囊表面向环境大气渗透,同时由于氦气浓度差向内置副气囊渗透并通过空气阀门排出。需要注意的是,前一途径是由于压差导致,气体泄漏量占主导,而后一途径为零压状态,气体泄漏量占比极小。右图为外壳式构型的Loon 气球,其副气囊填充氦气,与主气囊保持零压,氦气主要通过副气囊的部分上表面渗透,且等效材料厚度为副气囊材料与主气囊材料厚度之和,同时由于氦气浓度差通过副气囊向主气囊渗透,并通过主气囊或空气阀门排出。
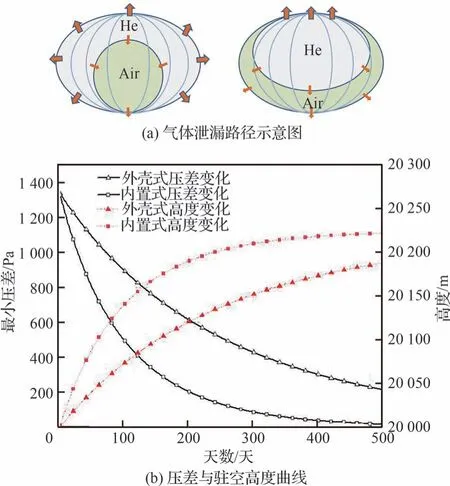
图9 氦气泄漏特性分析Fig.9 Analysis of helium leaking property
图9(b)中对比分析了2 种构型气球中因氦气泄漏导致的压差变化和驻空高度变化的情况。由图可知,在驻空阶段,外壳式构型气球的压差变化较小,从初始压差值1 300 Pa 下降到200 Pa需要约500 天,而内置式构型气球的压差下降上述范围需要约200 天。这说明在同等材料与工艺的情况下,外壳式构型可大幅降低气体泄漏,提高驻空能力。同时,由于氦气泄漏,气球驻空高度将有所提升,这是由于气体泄漏导致其系统总质量降低。因此,气球平台的上升量与气体的泄漏量相关。
3.4 能源平衡
改善太阳光线与电池阵的入射夹角,优化太阳电池阵发电特性,是平流层飞艇、太阳能无人机等临近空间低速飞行器提升其能源循环性能的重要方式[42-44]。Loon 气球通过2 种方法对太阳电池发电性能进行优化,一是太阳电池阵采用斜面安装方式,减小太阳高度角导致的入射角过低问题;二是对太阳电池引入了指向机构,使得其与太阳方位保持一致。这种方式类似于地面光伏发电系统的太阳跟踪系统,也在高空气球太阳电池标定中用于太阳跟踪控制[45-46]。
下面,对太阳电池阵发电特性进行分析,取太阳电池面积为5.0 m2,光电转换效率为20%,MPPT 效率为97%。对比分析太阳电池阵采用不同斜面安装角度的发电差异,结果如图10 所示。图10(a)给出了夏至日与冬至日在北纬40°的20 km 高空中太阳电池阵采用不同斜面安装倾角α时的发电曲线。由图可知,当太阳电池阵采用水平安装方式时(斜面安装角度为0°),当太阳高度角大于0°时电池阵开始发电,但是此时入射角接近于0°,因此发电量从0 开始逐渐增加。而当太阳电池阵具有一定的斜面安装角度时,入射角具有一定的初值,此时发电量将直接从某个初始值开始,该值与斜面安装角度和日期有关。例如,对于夏至日安装角为15°和30°的情况,太阳电池阵初始输出功率分别为340 W 和630 W。显然,虽然光照时长并未增加,但是太阳电池阵总输出能量将提升。

图10 太阳电池阵发电特性分析Fig.10 Power generation properties of solar array
图10(b)对比分析了北纬0°和40°位置处具有不同斜面安装角度的太阳电池阵逐日发电量曲线。显然,太阳电池阵的倾斜安装与指向调整可显著改善其输出特性。以北纬40°的情况为例,当安装角为0°时,其全年最低与最高输出功率分别为3.4 kWh 和11.1 kWh;当安装角为15°时,上述值分别为6.2 kWh 和14.2 kWh。这将明显改善气球平台的发电性能,拓展平台运行过程中的能量约束。
Loon 气球锂离子储能电池能量为3.6 kWh,这里设定其充放电效率为95%,锂离子储能电池可供夜间10 h 用电需求,取用电器总功率为360 W。当气球上的设备在恒定工况工作时,对冬至、北纬40°的具有不同太阳电池阵斜面安装角度(α=0°,15°)的循环能源特性进行分析。
由图11 可以看出,当太阳电池阵采用平面布局(α=0°)时,白天太阳电池最多仅将锂电池充至1 100 Wh,无法将锂电池完全充满,导致储能电池在夜间19:30 左右耗尽,无法实现昼夜闭环。因此,考虑到Loon 气球广泛的应用范围和持续的工作时间,为确保其能源闭环,采用太阳电池阵平面铺装时无法满足全年的能源循环要求。当太阳电池阵采用倾面安装(α=15°)时,日间可实现储能电池的完全充电,且最深放电情况下仍有770 Wh 的电量。
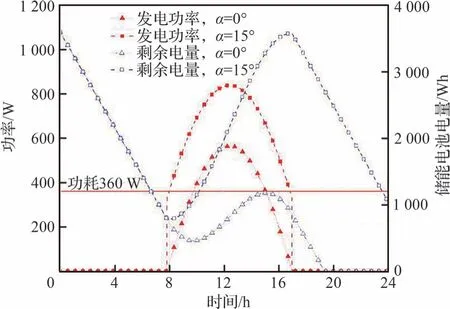
图11 能源昼夜运行仿真结果Fig.11 Simulation results for operation of energy system during day and night
3.5 轨迹规划
如2.6 节所述,根据任务类型,Loon 气球通过3 个功能层的协同工作完成自主导航全流程的控制。其中,长程导航系统根据大尺度中长期天气预报数据开展Loon 气球在长距离上的路径规划,是评估气球在大距离尺度上可达能力的重要依据。本节针对长程路径规划中的风场不确定性因素及推进能力因素对路径可达能力进行分析。
基于马尔可夫决策过程模型,通过值迭代方法对具有不同推进能力的气球在某个风层中的区域可达性进行分析。图12 为可达性分析结果,分别对应于具有0 m/s 和5 m/s 推进能力的气球在飞行区域中到达目标点的期望时间,图中的白色单元格为目标区域,其他各单元格的颜色代表其到目标点的时间。基于仿真的风层数据可知,当气球无动力时只能通过风场的作用到达目标点,只有在较小范围内可以快速部署到目标区域,大部分区域难以在该风层中直接到达目标点;当提供最大速度为5 m/s 时,气球在当前风层中可实现较大的可达性,大部分区域均能在10 h内到达目标点,说明适当增加气球的推进能力可有助于其轨迹规划能力。
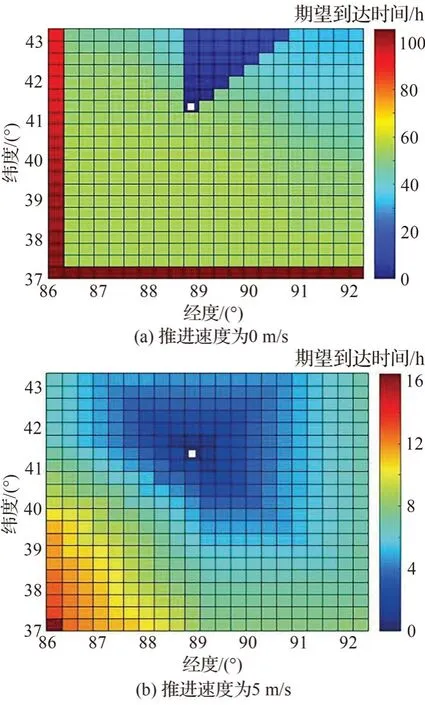
图12 具备不同推进能力气球的期望目标到达时间Fig.12 Expected target arrival time for balloons with different propulsion speeds
4 结 论
平流层浮空器基于高空气球技术体制,通过结合对临近空间风场的智能利用,可实现极强的驻空时长和自主飞行能力,在实现临近空间应用方面有巨大潜力,是具有广阔应用前景的新平台。Loon 气球经过近10 年的创新研究和实践探索,在材料与结构、高度控制、能源推进、安控回收、风场建模和自主控制等平台技术方面不断开展创新设计和技术攻关。本文通过对项目概况及实践探索总结分析,对平台和自主控制相关的核心关键技术进行了深入的讨论分析,并通过建模方法,重点围绕其总体参数、超热超压、气体泄漏、能源平衡、轨迹规划等方面进行仿真分析,研究了以上关键技术的性能改进情况。Loon 气球的技术探索与试验验证对基于风场环境利用的平流层浮空器的发展具有重要参考价值,结合本文研究分析,其启示主要体现在以下4 个方面:
1) 持久驻空能力方面。驻空时长是衡量平流层浮空器综合性能最重要的指标之一,也是其开展各类应用的前提。借鉴Loon 气球平均驻空时长突破240 天的技术实现方式,为提升浮空器持久驻空能力,应关注浮空器材料、结构、工艺等方面的综合优化。在材料性能方面,随着驻空时长的提升,对材料在强紫外、高臭氧环境中的耐老化能力要求将大幅提升,应针对性研制轻质、高强、耐候、低吸收率的高分子材料;在结构设计方面,应开展基于非线性黏弹性模型的球体全飞行过程分析,同时针对薄膜材料与加强筋材料差异[47],优化球体与加强筋的匹配设计;在工艺方面,应选择合适的加工工艺,加强对加工产品的检测手段,严格控制工艺流程,防止微孔损伤的出现[48]。
2) 循环能源优化方面。太阳电池是平流层浮空器系统获取能源的唯一途径,提高太阳电池的输出性能将有助于提升平台的操纵能力和载荷能力。结合Loon 气球技术方案,主要应从太阳电池的应用技术开展创新研究和设计。具体来说,一方面应采取太阳电池的定向与实时布局调整能力,通过准确定位太阳相对位置,调整太阳电池的角度,充分利用太阳辐射的能量,提高太阳电池的能量输出特性[49];另一方面,应改善太阳电池封装工艺和安装方式,提高太阳电池的驻空安全性能和耐老化能力,降低太阳电池的面密度。
3) 目标可达能力方面。目标可达能力是指平流层浮空器能够到达任务区域的能力,包括可达几率及抵达时长等参数。在Loon 气球的研制过程中发现,目标可达性是制约其应用的重要因素。当可达能力弱时,只能通过多平台协同工作来进行,这将加剧任务复杂度和任务成本。为此,Loon 气球在项目后期提出了弱动力控制方法。结合Loon 气球在可达性能力设计和分析方面的工作,应重点关注2 个方面:一是兼顾总体性能的电推进系统设计,包括设备选型、安装方式、转向设计、推进能力需求等[50],应特别注意如果浮空器未采用流线性气动外形,推进系统安装位置会影响推进过程中的球体姿态,进而影响其推进能力;二是推进系统工作策略,应降低推进系统对储能电池的能量需求,否则将使得智能平流层浮空器走向平流层飞艇技术途径。
4) 自主飞行能力方面。自主飞行是智能平流层浮空器最主要的特征,是其有别于传统高空气球的根本。鉴于Loon 气球在自主飞行方面的创新研究,应关注平流层浮空器在不确定风场环境中的自主导航与控制方法。可借鉴Loon 导航控制系统设置,根据任务类型进行功能的解耦与匹配。例如,对于单浮空器平台,应根据其远距离的快速抵达或近距离的区域驻留与航路规划进行分别研究。同时,应结合大气科学和人工智能的进展,利用再分析数据对智能控制算法进行充分的训练和调优,构建适应于一定目标任务的控制器。
