异构智能车队安全行驶控制研究
2023-06-25席宽樊展鹏曹子轩刘双萍陈磊
席宽 樊展鹏 曹子轩 刘双萍 陈磊
摘要:异构智能车队是提高高速公路通行能力,以及降低能源消耗的有效途径,但是车队行驶过程中的碰撞风险是其面临的挑战。对异构智能车队主动安全控制方法进行研究,首先对车队碰撞风险进行分类,指出了影响异构智能车队安全行驶的因素主要有通信延误、通信距离、制动性能;然后构建了异构智能车队安全自适应巡航控制模型,采用滑模控制技术进行控制,仿真结果表明,滑模控制在确保满足车队稳定性的基础上具有良好控制效果;最后构建了异构智能车队队内车辆紧急换道避撞行为决策模型,并通过仿真试验验证了换道决策的有效性。研究结论对异构智能车队的主动安全控制以及提高车队的安全性,具有一定的参考价值。
关键词:异构智能车队;自适应巡航控制;紧急换道决策;滑模控制
中图分类号:U495 收稿日期:2023-03-30
DOI:10.19999/j.cnki.1004-0226.2023.06.009
1 前言
国民经济的快速发展促进了公路交通的发展,同时汽车保有量也大幅度增加。高速公路在为经济快速发展提供保障的同时也为国民的出行带来了极大的便利,交通安全成了备受关注的话题。根据《全球道路安全现状报告》,全球每年有约200多万人死于交通事故,由车辆驾驶所造成的交通安全事故高达1/3。智能交通为有效解决交通出行效率和交通安全之间存在的矛盾提供了可能,基于V2X的交通环境信息感知交互技术能够对车辆行驶过程中存在的潜在交通安全风险发出预警,从而大大降低交通安全事故的发生。智能车辆编组行驶是提高道路交通效率的有效手段,其通过先进的控制技术、V2V通信技术对同向行驶的车辆统一组织,结合车队前车的运动状态来进行跟踪调整[1]。
智能车队主要有同构智能车队和异构智能车队两种类型,其中同构智能车队中所有车辆类型相同、性能参数相同,主动安全控制相对比较容易,同时学术界的研究比较多,控制技术相对成熟[2];异构智能车队中车辆的类型不同、性能参数也不相同,和同构智能车队相比,异构智能车队的主动安全控制更为复杂。
伴随着车辆类型的多元化发展,异構智能车队在实际中的应用更为广泛,对异构智能车队的主动安全控制迫在眉睫。基于此,本文对异构智能车队安全自适应巡航控制和车队内车辆紧急换道避障决策控制进行研究,期待对促进异构车队的安全、稳定行驶具有一定的参考。
2 异构智能车队碰撞风险
2.1 车队碰撞风险分类
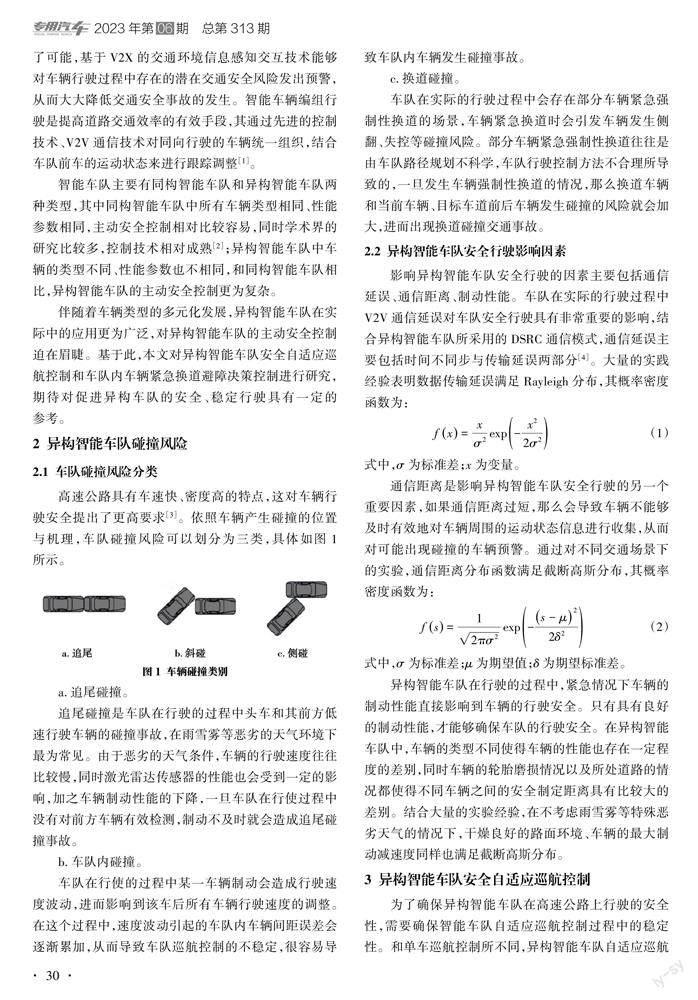
高速公路具有车速快、密度高的特点,这对车辆行驶安全提出了更高要求[3]。依照车辆产生碰撞的位置与机理,车队碰撞风险可以划分为三类,具体如图1所示。
a.追尾碰撞。
追尾碰撞是车队在行驶的过程中头车和其前方低速行驶车辆的碰撞事故,在雨雪雾等恶劣的天气环境下最为常见。由于恶劣的天气条件,车辆的行驶速度往往比较慢,同时激光雷达传感器的性能也会受到一定的影响,加之车辆制动性能的下降,一旦车队在行使过程中没有对前方车辆有效检测,制动不及时就会造成追尾碰撞事故。
b.车队内碰撞。
车队在行使的过程中某一车辆制动会造成行驶速度波动,进而影响到该车后所有车辆行驶速度的调整。在这个过程中,速度波动引起的车队内车辆间距误差会逐渐累加,从而导致车队巡航控制的不稳定,很容易导致车队内车辆发生碰撞事故。
c.换道碰撞。
车队在实际的行驶过程中会存在部分车辆紧急强制性换道的场景,车辆紧急换道时会引发车辆发生侧翻、失控等碰撞风险。部分车辆紧急强制性换道往往是由车队路径规划不科学,车队行驶控制方法不合理所导致的,一旦发生车辆强制性换道的情况,那么换道车辆和当前车辆、目标车道前后车辆发生碰撞的风险就会加大,进而出现换道碰撞交通事故。
2.2 异构智能车队安全行驶影响因素
异构智能车队在行驶的过程中,紧急情况下车辆的制动性能直接影响到车辆的行驶安全。只有具有良好的制动性能,才能够确保车队的行驶安全。在异构智能车队中,车辆的类型不同使得车辆的性能也存在一定程度的差别,同时车辆的轮胎磨损情况以及所处道路的情况都使得不同车辆之间的安全制定距离具有比较大的差别。结合大量的实验经验,在不考虑雨雪雾等特殊恶劣天气的情况下,干燥良好的路面环境、车辆的最大制动减速度同样也满足截断高斯分布。
3 异构智能车队安全自适应巡航控制
为了确保异构智能车队在高速公路上行驶的安全性,需要确保智能车队自适应巡航控制过程中的稳定性。和单车巡航控制所不同,异构智能车队自适应巡航不仅仅要确保车辆自身的行驶稳定性,同时还要确保整个车队的行驶稳定性[5]。
3.1 异构智能车队安全自适应巡航控制模型
考虑到异构车队系统的不确定性,采用滑模控制方法进行控制。滑模控制为特殊的非线性控制,其能够在动态过程中根据不固定系统当前状态来进行有目的地变化,从而使得系统按照预定的滑动模态进行运动。和其他的控制方法所不同,滑模控制具有快速响应、对应参数变化与扰动不灵敏、无需系统标识、物理实现简单等优点。
滑模控制的原理是根据系统的期望动态特性设计系统的切换超平面。滑模控制器用于控制从超平面到切换超平面的系统状态。一旦系统到达切换超平面,控制函数将确保系统沿着切换超平面到达系统原点。这种沿着切换超平面滑动到原点的过程称为滑动模式控制。由于系统的特性和参数仅取决于设计的切换超平面,与外界干扰无关,滑模变结构控制具有很强的鲁棒性。
超平面的设计方法包括极点配置、特征向量分配、优化设计等,所设计的切换超平面必须满足达到的条件,即系统将保持在滑模平面之后的平面内。控制器设计包括固定序列控制器设计、自由序列控制器设计和最终滑动控制器设计。滑模控制设计主要包括两步:第一步是设计滑模面,要确保不稳定系统存在滑模面;第二步是选择合适的趋近规律,能够确保不稳定的系统在所设计的滑模面上进行滑模运动。在考虑时间延迟的情况,控制器稳定参数满足如下公式:
3.2 异构智能车队安全自适应巡航控制仿真
4 队内车辆紧急换道避撞行为决策控制
为了确保异构智能车队行驶的安全性,车队在行驶过程中遇到紧急情况是否发生车队内车辆的追尾碰撞依赖于车辆的制动性能。在智能车队内,车辆的换道属于强制性换道。受限于车队内车辆之间的距离短以及车辆运动状态调整的复杂性,必须做好行为决策控制,才能够避免发生安全事故。
4.1 队内车辆紧急换道避障决策
根据车队车辆间设定的安全距离,在正常情况下是不会发生队内车辆碰撞事故的,但是由于异构智能车队内不同车辆之间的制动性能往往具有比较大的差异,这使得在实际的行车过程中难免会出现紧急情况。在紧急情况下,车队中的部分车辆就需要紧急换道以此来避免发生碰撞[6]。构建车辆紧急换道的周围环境,在此基础上分析车辆换道的最佳时机。
为了避免碰撞就必须确保两车之间的安全距离,定义为确保换道不发生碰撞和周围车辆需要保持的最小距离为安全间距。紧急换道车辆E在紧急换道时,为了不和车队内前车L1发生碰撞,拥有更长的换道时间,在换道的决策阶段应该以最大的制动减速度来进行制动。基于此,在换道的决策阶段必须确保紧急换道车辆和周围的车辆保持安全距离,如果不满足安全距离,那么就不能够实施紧急换道。在换道的决策阶段通过车辆减速制动,快速对最佳的换道时间做出判断。车辆紧急换道决策步骤如下:
a.在确保紧急换道车辆侧翻安全性和车辆稳定性的前提下确定最短的换道时间,这是因为车辆在高速公路上行驶的过程中速度非常快,快速的换道很容易导致车辆发生侧翻,尽管没有出现车辆碰撞事故,但是却出现了侧翻事故,这是绝对不允许的。
b.根据车辆安全距离模型来判断是否需要换道避撞;如果不需要换道避撞,那么车辆减速紧急制动就可以,這样就能够避免车辆和车队内的前车之间发生追尾事故,这是因为在高速行驶的过程中紧急换道是非常危险的行为,应该尽量避免;如果确定需要换道避撞,那么就做出换道避撞的决策。
c.在做出换道避撞的决策之后选择最佳的换道时间,在最佳的换道时间进行车辆换道操作,然后对车速进行调整,避免换道车辆和新车道车辆之间发生碰撞事故。
紧急换道车E在换道的过程中匀速运动,旁车道后车L2在换道车辆E换道的过程中速度不发生改变,在换道之后根据运行状态来做出调整对旁车道前车L2来讲,在换道车辆E换道的过程中速度不发生改变,换道车辆E在换道完成之后结合自身和旁车道前车L2的运动状态来做出调整。对车队内前车L1来讲,在紧急换道车辆E换道的过程中做匀减速运动。
4.2 队内车辆紧急换道避障决策仿真
设定异构智能车队的正常行驶速度为30 m/s,道路宽度为4 m,换道过程中前车的制动加速度为8 m/s2,后车的制动加速度为5 m/s2。仿真结果表明紧急换道车辆E和车队内前车L1的安全距离先增大后减少。通过调整换道车辆E的速度进行再次仿真可知,当换道车辆E的初始速度大于旁车道前车L2和旁车道后车R2的速度时,旁车道后车R2对紧急换道车选择换道时刻的选择几乎无影响,主要影响换道时间选择的因素是紧急换道车E和旁车道前车L2以及车队内前车L1的安全距离。
5 结语
异构智能车队在提高道路交通效率,确保行驶安全方面发挥着至关重要的作用,在实际中得到了广泛的应用。异构智能车队碰撞主要有追尾碰撞、斜向碰撞、侧向碰撞三种类型,影响车队安全行驶的因素有通信延误、通信距离、车辆制动性能。采用滑模控制技术对异构智能车队安全自适应巡航进行控制,其使得车队自适应巡航跟踪误差超调量小,在满足车队稳定性的基础上控制效果良好。通过构建紧急换道周围环境,提出了车辆紧急换道决策方法,并通过仿真指出紧急换道车辆初始车速对换道时刻选择的影响。本文的研究对异构智能车队主动安全控制,确保车队的安全、稳定行驶具有一定的参考价值。
参考文献:
[1]雷利利,张通基于模糊MPC的智能车队纵向跟随控制[J]江苏大学学报(自然科学版),2022,43(4):394-399+430
[2]覃频频,张顺锋,吴锋民,等基于改进智能驾驶员模型的车队纵横向协同控制[J]公路交通科技,2022,39(9):155-161+176
[3]常鑫,李海舰,荣建,等混有智能网联车队的交通流基本图模型分析[J]东南大学学报(自然科学版),2020,50(4):782-788
[4]朱畏畏,江浩斌,马世典,等基于鱼群逃逸仿生学的智能车队安全行驶模型研究[J]机械制造与自动化,2018,47(5):190-193+205
[5]覃频频,裴世康,侯晓磊,等不同车辆工况对协同自适应巡航控制车队行驶安全的影响[J]交通运输系统工程与信息,2019,19(4):33-42
[6]张家旭,杨雄,施正堂,等汽车紧急换道避障的路径规划与跟踪控制[J]华南理工大学学报(自然科学版),2020,48(9):86-93+106
作者简介:
席宽,男,2001年生,本科在读,研究方向为智能车队。
