短途无人配送车自动驾驶技术研究综述
2023-06-25王强晖邵忠瑛
王强晖 邵忠瑛
摘要:随着互联网经济与物流运输的迅猛发展,“最后一公里”在送货效率、安全、成本上需要更智能化的解决方案,无人化的物流配送成为解决当前配送痛点的关键技术,短途无人配送车已经从试验室阶段迈向商业化应用阶段。与其他车型的无人驾驶技术类似,无人配送车也需要应用到车辆定位、环境感知、路径规划及决策、车辆控制四大核心技术。据此,通过研究核心技术的发展情况,梳理了现阶段无人配送车存在的技术问题,以期为行业提供参考。
关键词:短途;自动驾驶;无人配送;综述研究
中图分类号:U471.1 收稿日期:2023-01-12
DOI:10.19999/j.cnki.1004-0226.2023.06.003
1 前言
作为整个货运物流传动链条中费用最大、效率最低、环境污染最严重的“最后一公里”,一直是派送阶段质量的短板。这尽管归属于配送尾端,却具有非常重要的意义。有数据显示,末端配送阶段在费用和时间的耗费占整个派送作业30%之上。无人配送的痛点由客观原因和人为要素产生,充分体现在“最后一公里”配送的发货速率、配送安全性、配送成本费三个方面。比如,须派送货物品类诸多、配送过程中环境繁杂、派送途径繁杂、消费者对于派送规定多种多样、派送工作人员服务质量不一等问题。物流运输“最后一公里”需要更加智能的方式来优化。
派送的痛点持续存在,但配送需求与日俱增。在我国互联网快速发展的同时,物流运输也在飞速发展,不断增长的货运量和订单数量给派送尾端带来极大的工作压力。而另一个现实是,我国适龄青年劳动人口在不断减少。由于人口老龄化和城市化进程的加速,适龄青年工作人口总数与生产建设、服务项目消费市场中间形成了极大差别。由此可见,单靠人力开展派送,早已不能完全处理时下物流运输“最后一公里”所存在的困难,无人配送的高速发展刻不容缓。
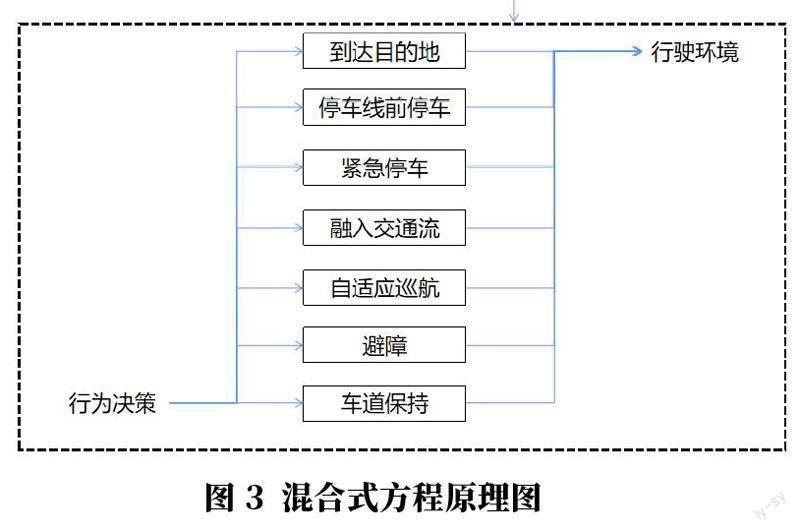
无人配送是一种自动驾驶系统的实际应用,因此需要使用自动驾驶中的相关技术,其中大部分技术跟一般的无人驾驶基本一致,需要将硬件与软件感应器紧密结合,完成汽车定位、环境感知、最短路径算法管理决策、车辆控制四大关键技术,如图1所示。
本文主要从无人配送需要用到的无人驾驶技术和遇到的技术难点进行解读,共同探讨如何有效提升“最后一公里”的运作效率,以期为行业起到借鉴作用。
2 车辆定位技术
无人配送与自动驾驶系统一样,也要运用到定位技术。自动驾驶系统的基础是自主导航,不仅是车子与外界因素的位置关系,还要认知车子本身的绝对位置,因而定位与导航都是核心技术之一。现阶段自动驾驶系统定位主要依靠卫星导航系统和惯性导航系统来达到。
a.卫星导航系统。GPS、北斗卫星导航系统都涉及射定位技术和相对定位技术。相对定位技术可分为静态数据定位与动态精准定位两类,其中动态精准定位RTK理论是一种新的常见定位系统测量方法。
无人配送车辆使用的是RTK定位技术。RTK定位技术归属于多源定位技术,对天气情况及周边阻碍物敏感度低。通过互联网RTK对数据进行差分信号的运算,得出移动站与基准站的偏差关联性,从而得到定位导航。
b.惯性力高航系统软件(通称惯导系统)。惯导系统的硬件由手机陀螺仪和加速度传感器组成。惯导系统归属于测算导航方式,可连续测到载体的所在位置。该系统不受外界干扰信号产生的影响,具备全天、全天候、全地域工作等特点。
应对具体繁杂的行车自然环境,定位系统通常会受制于自身缺点而难以保证精确度,因而现阶段无人自动驾驶车辆主要采用的是通信卫星惯导系统的排列方式。
3 環境感知技术
环境感知作为自动驾驶系统里的主要阶段,处在无人驾驶汽车与外界因素数据交换平台的关键所在部位,其重点在于使无人驾驶汽车能够更好地模拟人类驾驶员感知力,进而了解自己和周围的安全驾驶情况。
好似人们受制于本身视线一样,无人驾驶汽车上安装的各种感应器也有自己的认知盲点。在无人驾驶环节中,根据组合使用多种类型传感器和陨铁时钟频率关联感知技术,能够屏蔽认知盲点,一般不会影响正常安全驾驶。
无人驾驶汽车获得与处理环境数据,主要运用于情况感知和V2X网联平台通信。交通出行情况认知功能性的完成取决于环境感知感应器及相应的感知技术。依照获得交通出行环境数据的路径,可分为以下两种:
a.处于被动环境传感器。此类感应器本身不容易发射信号,而是通过接纳外界反射面或辐射源信号获得环境数据。
b.积极环境传感器。此类感应器主动与环境因素发射信号开展环境感知,主要是指激光传感器、车载雷达和超声波雷达。
车体情况认知功能性的完成主要基于GPS、北斗卫星导航系统、惯性导航系统等设施,致力于获得汽车的行车速度、姿势方向等相关信息,为无人驾驶汽车的定位与导航栏提供有效数据信息。
V2X网联平台通信阐述了汽车、路面、使用人三者的联系,主要利用RFID、拍照设备、云主机等得到交通路况、交通信息、路人信息内容等一系列路况信息,进而提升安全驾驶可靠性和安全驾驶高效率。智能化汽车里选用配置计划方案通常由多种型号规格或多种类型机器设备来搭配。
一般来讲,感知设备类型越大,价钱越高,精密度相对越高,鉴别范围相对越大。然而每一种感知设备都有局限性,因为道路环境、气温自然环境的多样化,以及其无人驾驶汽车自身的运动特性,照相机容易受众多不可控因素产生的影响。
雷达探测对阳光照射、颜色等不可控因素具有极强的可扩展性,激光传感器、车载雷达和超声波雷达也都有自己的优点,但都不可能彻底消除凹痕反射面、粉尘影响和雨、雪、雾等恶劣气温情况下的检测难点。
定位系统为无人驾驶带来了高精准定位、导航和授时服务,RTK INS组成也为即时精准定位和装配精度提供了保障。因此,无人驾驶汽车应以每日任务需求为导向,针对性地选择适宜的感知设备,组成完成合理配置,做到根本目的。
4 路径规划
最短路径算法是智能驾驶所涉及的一项重要技术。近些年该方法最大的一个改善便是考虑到汽车具体驾驶的自然条件,并依据控制系统形成最优的参照途径。
路径规划一般分为三大形式:
a.分层次递阶式路径规划。
这是一个串联体系结构,在这个体系中,各控制模块顺序明晰,因而也被称为“认知-整体规划-行为”构造。得出任务和约束后,整体规划管理决策便会依据原有标准确定出行为路经,从而完成每日任务。但是它也有缺陷,对全局性标准较为理想,但对传感器和测算数据库系统较为严苛;另外,稳定性不太高,一旦其中出现问题,很有可能形成总体崩溃的情况。
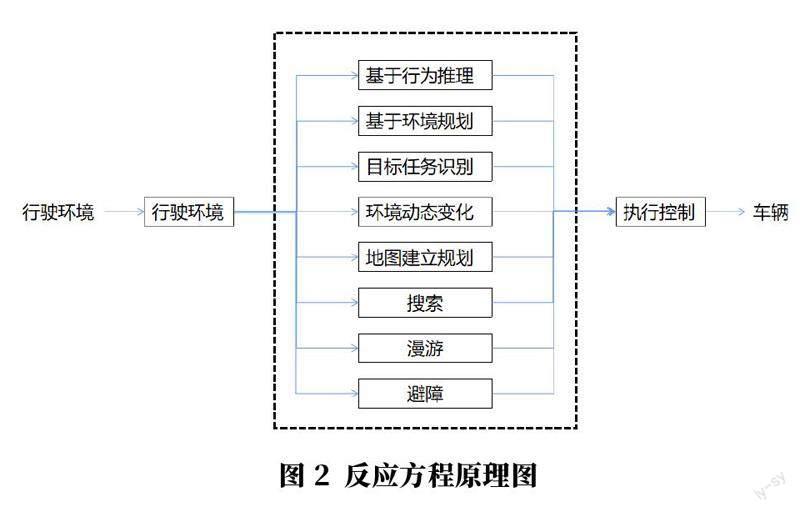
b.反应方程式的路径规划。
选用并接构造,每一个控制层能直接根据传感器键入开展管理决策,更适用于彻底陌生环境。由于每一层只需承担全面的某一个个人行为,整个系统可以方便地完成衔接,并且如果某一层的控制模块出现常见故障,剩余层次仍可能存在价值,系统软件的可扩展性获得了很大的提高。但是它也有自身缺点,系统软件实施的协调能力,必须配备联动机制去解决每个控制电路的冲突;另外,伴随每日任务复杂性的提高和各个人行为中间配对检验的提高,预测分析能力可能不够,从而欠缺较高级别的智能化,如图2所示。
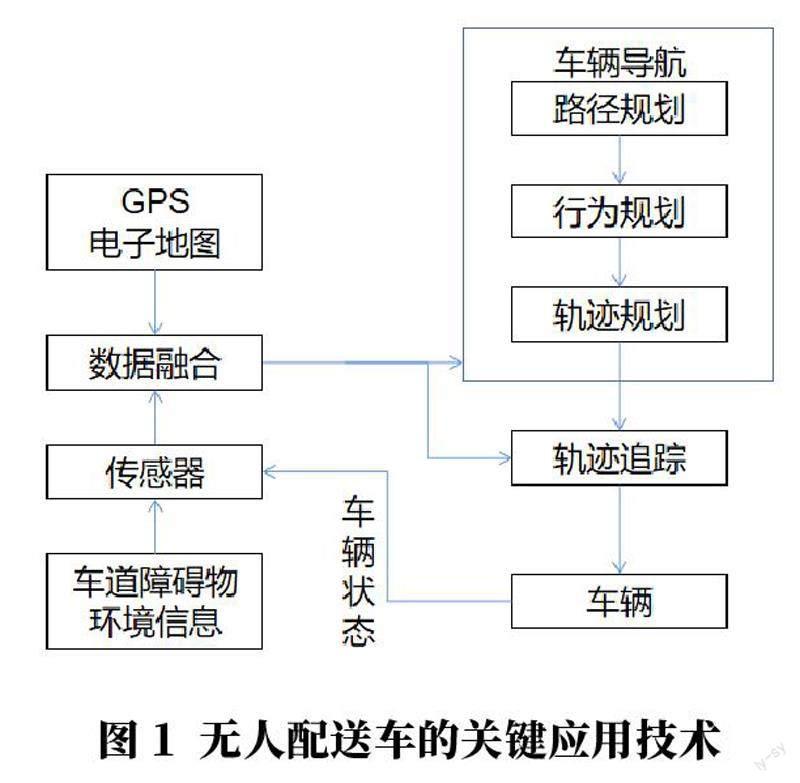
c.混合式路径规划。
分层递阶式和反应式各有优劣,都难以单独满足使用需求,因此应将两者进行有效的结合。混合式在全局规划层次上偏向于分层递阶式行为,在局部规划层次上偏向于反应式行为。混合式体系结构可以应对复杂多变的使用环境,如图3所示。
5 车辆控制执行
无人配送车必须在环境感知的前提下,依据决策规划出来的总体目标运动轨迹,并根据纵向和横向控制系统的搭配使用,使车辆必须按照总体目标运动轨迹精确平稳行车。依据行车自然环境到安全驾驶动作投射的全过程,无人驾驶控制系统可分为间接控制和完全控制两个不同的方案。
无人驾驶间接控制是一类根据整体规划及追踪的主力无人驾驶车辆的控制方式。根据当前汽车行为要求,在符合汽车本身约束下,规划出一条行得通且可控的无撞击安全性轨迹,以此来实现独立安全驾驶。
无人驾驶完全控制是一类根据人工智能无人驾驶汽车自主控制决策方法。假如被控对象的特点与环境状态已知,且能得到令人满意的控制性能,但实际上行车自然环境受诸多因素的影响,具有高度的不可操控性,致使车辆本身存在行车差异。而完全控制依据人工智能设定了从行车自然环境到安全驾驶动作直接映射的全过程,有较强的操控性和实用性。
6 无人配送车相关技术存在的问题
无人配送技术尽管发展快速,但还是处于产品研发实验的时期,目前仅在局部地区开展小范围的检测。想进入商业化还应克服以下问题:
a.非嵌入式操作系统产生安全隐患:无人配送车的超算平台多为非实时电脑操作系统,可事实上依照车规的需求,每一个车載操作系统都要即时实际操作,才能保证反应速率及使用安全性。
b.机器学习算法水平不够优秀:当面对繁杂情景时,现阶段机器深度学习水平暂且不能非常好的解决。
c.决策规划和运动控制技术还不足以达到市场多元化、个性化的需求:现在市场还在发展中,下游的无人驾驶车技术性经销商暂时还不能提供个性化要求,这也使得无人配送车在决策规划及控制上存在比较多的难题与挑战。
d.车辆可靠性还需要进一步提高:配送过程中遭遇多元化的情景,能不能达到高韧性工作中的派送要求,应该是对车辆稳定性的考验。
e.市场需求的不一致造成车辆设备欠缺专业化、规范化的通用性,提升了成本。
7 结语
无人配送是人工智能典型性落地式情景。尽管自动驾驶系统离彻底完善尚需时日,可是无人配送能够帮助自动驾驶系统迅速落地、不断迭代。
目前,派送情景需要大量科技创新,一旦取得成功,可实现传统产业升级,进行服务性产业链向科技驱动服务性产业链衔接。
参考文献:
[1]刘晓鹏.破解无人配送车商业化困局[J].中国物流与采购,2022(23):26-27.
[2]宋苗苗.基于服务设计的校园无人配送车设计研究[D].哈尔滨:哈尔滨理工大学,2022.
[3]刘锐,郭文佳,刘传福.基于配送需求的无人驾驶驶向“经商”赛道的必然和挑战[J].智能网联汽车,2021(5):65-67.
[4]四川移动推出5G+高精度定位无人配送车[J].通信与信息技术,2020(2):34.
[5]夏华夏.无人驾驶在末端物流配送中的应用和挑战[J].人工智能,2018(6):78-87.
作者简介:
王强晖,男,1991年生,助理工程师,研究方向为智能驾驶道路测试。
