基于混合蚁群算法的无人机航迹规划
2023-06-15郝昱陈强
郝昱 陈强
摘要:由于传统方法在无人机航迹规划实际应用中规划的航迹长度较长,文章提出基于混合蚁群算法的无人机航迹规划。由山峰模型和天气模型组建无人机航迹环境数学模型,描述无人机飞行航迹环境情况,以无人机航迹代价最小建立目标函数,并对无人机航迹长度、高度、速度、转弯角度进行约束,采用混合蚁群算法对目标函数求解,求出最优航迹规划策略。实验证明,文章设计方法规划的航迹长度最短为1 032.58 m,规划航迹长度较短,在无人机航迹规划方面具有良好的应用前景。
关键词:混合蚁群算法;无人机;航迹规划;航迹代价;约束条件
中图分类号:TP391 文献标志码:A
0 引言
航迹规划是无人机完成飞行任务的关键,无人机自主飞行主要依靠航迹规划,一条合格的无人机航迹规划路线需要满足线路短、达到时间短、能源消耗少、代价小、无障碍等多个条件,由于多数情况下无人机飞行环境比较恶劣,障碍物较多,地形比较复杂,导致无人机航迹规划难度较高[1]。随着无人机生产数量和需求量的不断提高,无人机航迹规划问题受到学者和专家们的重视和关注[2-3]。
1 无人机航迹规划方法设计
1.1 无人机飞行环境建模
无人机航迹规划是在一个特定的环境中,首先需要建立无人机飞行环境数学模型,此次采用指数函数模拟出山峰环境,其用公式表示为:
h(x,y)=∑i=1Hiexp-x-xix*2-y-yiy*2(1)
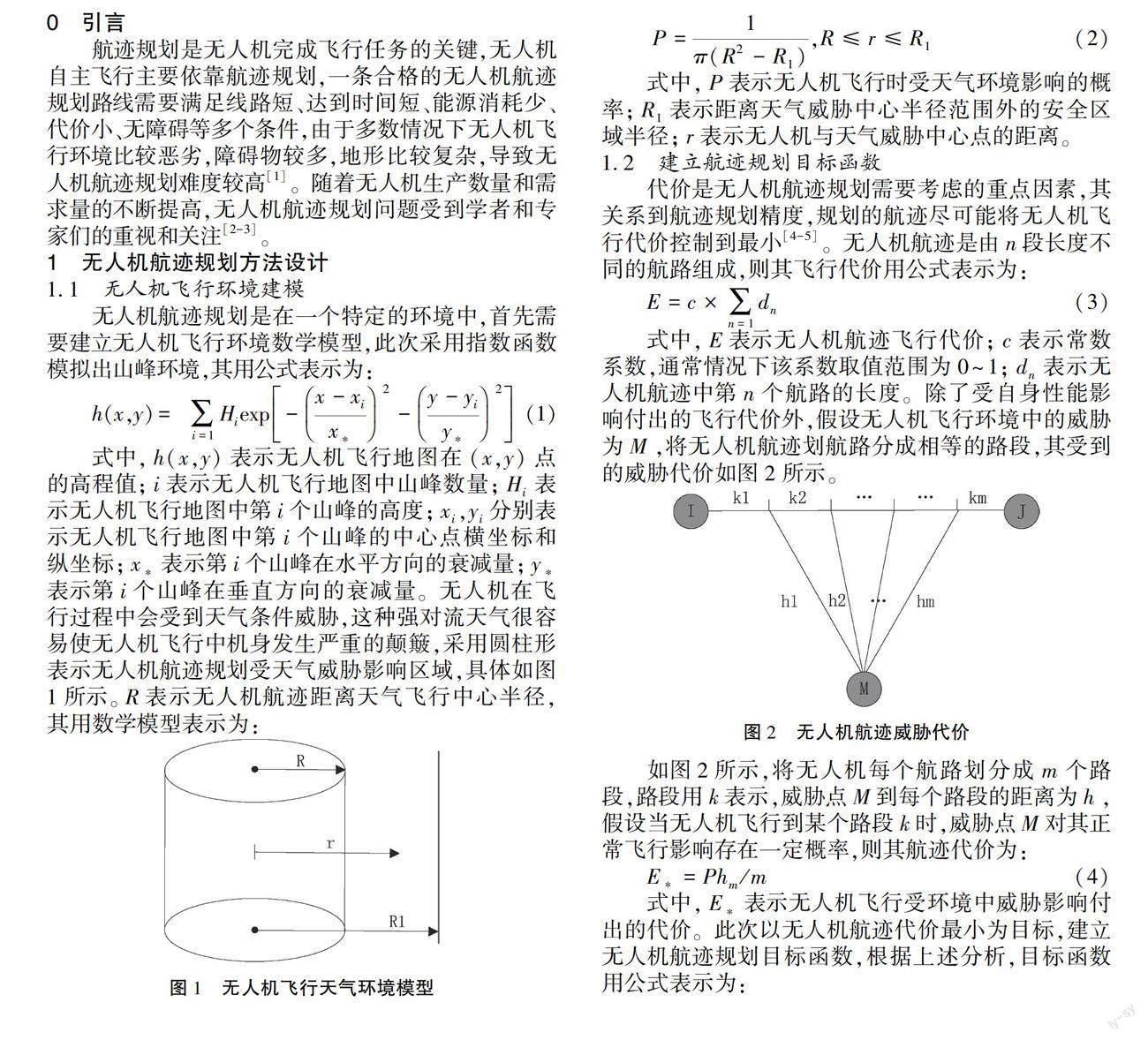
式中,h(x,y)表示无人机飞行地图在(x,y)点的高程值;i表示无人机飞行地图中山峰数量;Hi表示无人机飞行地图中第i个山峰的高度;xi,yi分别表示无人机飞行地图中第i个山峰的中心点横坐标和纵坐标;x*表示第i个山峰在水平方向的衰减量;y*表示第i个山峰在垂直方向的衰减量。无人机在飞行过程中会受到天气条件威胁,这种强对流天气很容易使无人机飞行中机身发生严重的颠簸,采用圆柱形表示无人机航迹规划受天气威胁影响区域,具体如图1所示。R表示无人机航迹距离天气飞行中心半径,其用数学模型表示为:
P=1π(R2-R1),R≤r≤R1(2)
式中,P表示无人机飞行时受天气环境影响的概率;R1表示距离天气威胁中心半径范围外的安全区域半径;r表示无人机与天气威胁中心点的距离。
1.2 建立航迹规划目标函数
代价是无人机航迹规划需要考虑的重点因素,其关系到航迹规划精度,规划的航迹尽可能將无人机飞行代价控制到最小[4-5]。无人机航迹是由n段长度不同的航路组成,则其飞行代价用公式表示为:
E=c×∑n=1dn(3)
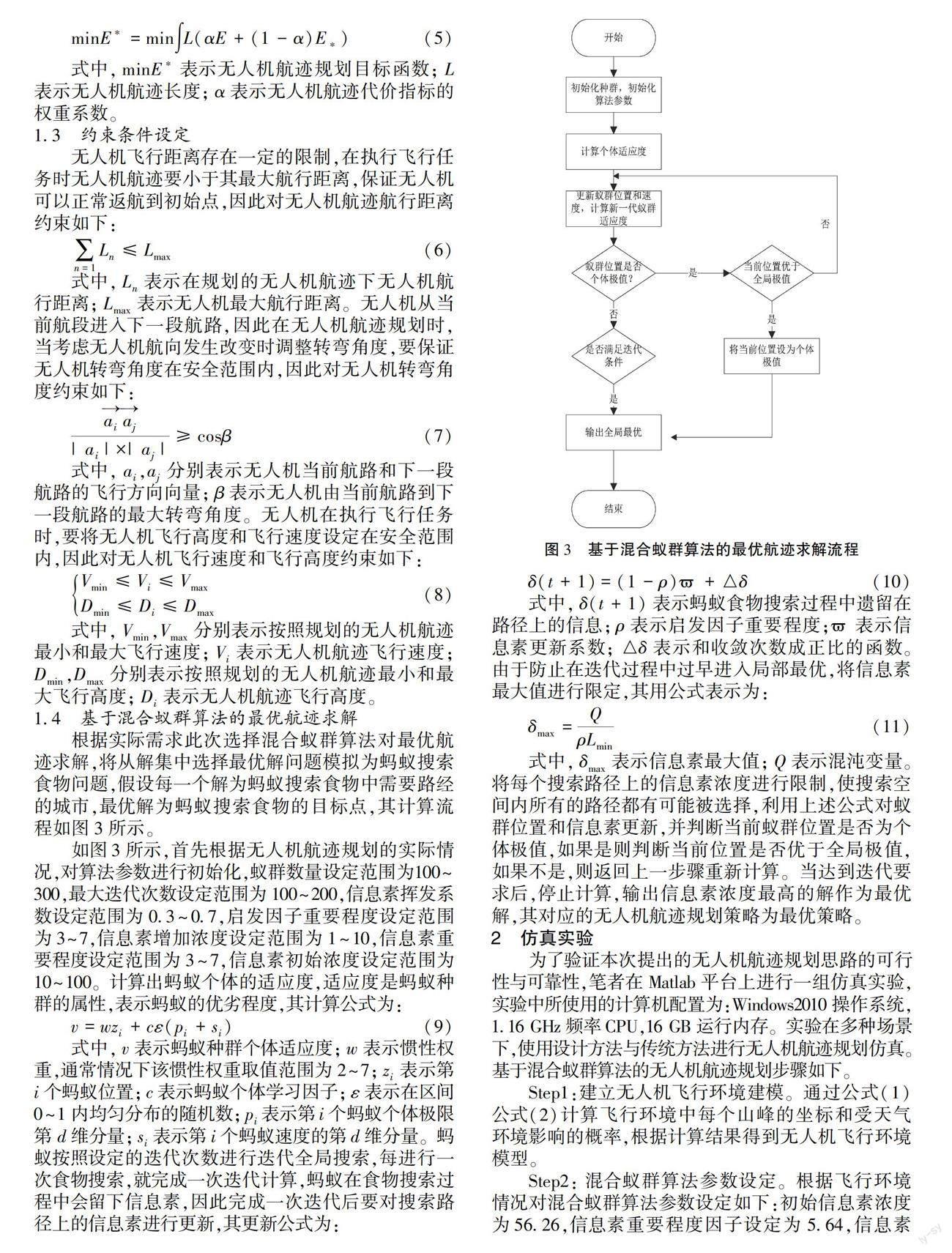
式中,E表示无人机航迹飞行代价;c表示常数系数,通常情况下该系数取值范围为0~1;dn表示无人机航迹中第n个航路的长度。除了受自身性能影响付出的飞行代价外,假设无人机飞行环境中的威胁为M,将无人机航迹划航路分成相等的路段,其受到的威胁代价如图2所示。
如图2所示,将无人机每个航路划分成m个路段,路段用k表示,威胁点M到每个路段的距离为h,假设当无人机飞行到某个路段k时,威胁点M对其正常飞行影响存在一定概率,则其航迹代价为:
E*=Phm/m(4)
式中,E*表示无人机飞行受环境中威胁影响付出的代价。此次以无人机航迹代价最小为目标,建立无人机航迹规划目标函数,根据上述分析,目标函数用公式表示为:
minE*=min∫L(αE+(1-α)E*)(5)
式中,minE*表示无人机航迹规划目标函数;L表示无人机航迹长度;α表示无人机航迹代价指标的权重系数。
1.3 约束条件设定
无人机飞行距离存在一定的限制,在执行飞行任务时无人机航迹要小于其最大航行距离,保证无人机可以正常返航到初始点,因此对无人机航迹航行距离约束如下:
∑n=1Ln≤Lmax(6)
式中,Ln表示在规划的无人机航迹下无人机航行距离;Lmax表示无人机最大航行距离。无人机从当前航段进入下一段航路,因此在无人机航迹规划时,当考虑无人机航向发生改变时调整转弯角度,要保证无人机转弯角度在安全范围内,因此对无人机转弯角度约束如下:
aiaj|ai|×|aj|≥cosβ(7)
式中,ai,aj分别表示无人机当前航路和下一段航路的飞行方向向量;β表示无人机由当前航路到下一段航路的最大转弯角度。无人机在执行飞行任务时,要将无人机飞行高度和飞行速度设定在安全范围内,因此对无人机飞行速度和飞行高度约束如下:
Vmin≤Vi≤Vmax
Dmin≤Di≤Dmax(8)
式中,Vmin,Vmax分别表示按照规划的无人机航迹最小和最大飞行速度;Vi表示无人机航迹飞行速度;Dmin,Dmax分别表示按照规划的无人机航迹最小和最大飞行高度;Di表示无人机航迹飞行高度。
1.4 基于混合蚁群算法的最优航迹求解
根据实际需求此次选择混合蚁群算法对最优航迹求解,将从解集中选择最优解问题模拟为蚂蚁搜索食物问题,假设每一个解为蚂蚁搜索食物中需要路经的城市,最优解为蚂蚁搜索食物的目标点,其计算流程如图3所示。
如图3所示,首先根据无人机航迹规划的实际情况,对算法参数进行初始化,蚁群数量设定范围为100~300,最大迭代次数设定范围为100~200,信息素挥发系数设定范围为0.3~0.7,启发因子重要程度设定范围为3~7,信息素增加浓度设定范围为1~10,信息素重要程度设定范围为3~7,信息素初始浓度设定范围为10~100。计算出蚂蚁个体的适应度,适应度是蚂蚁种群的属性,表示蚂蚁的优劣程度,其计算公式为:
v=wzi+cε(pi+si)(9)
式中,v表示蚂蚁种群个体适应度;w表示惯性权重,通常情况下该惯性权重取值范围为2~7;zi表示第i个蚂蚁位置;c表示蚂蚁个体学习因子;ε表示在区间0~1内均匀分布的随机数;pi表示第i个蚂蚁个体极限第d维分量;si表示第i个蚂蚁速度的第d维分量。蚂蚁按照设定的迭代次数进行迭代全局搜索,每进行一次食物搜索,就完成一次迭代计算,蚂蚁在食物搜索过程中会留下信息素,因此完成一次迭代后要对搜索路径上的信息素进行更新,其更新公式为:
δ(t+1)=(1-ρ)+△δ(10)
式中,δ(t+1)表示蚂蚁食物搜索过程中遗留在路径上的信息;ρ表示启发因子重要程度;表示信息素更新系数;△δ表示和收敛次数成正比的函数。由于防止在迭代过程中过早进入局部最优,将信息素最大值进行限定,其用公式表示为:
δmax=QρLmin(11)
式中,δmax表示信息素最大值;Q表示混沌变量。将每个搜索路径上的信息素浓度进行限制,使搜索空间内所有的路径都有可能被选择,利用上述公式对蚁群位置和信息素更新,并判断当前蚁群位置是否为个体极值,如果是则判断当前位置是否优于全局极值,如果不是,则返回上一步骤重新计算。当达到迭代要求后,停止计算,输出信息素浓度最高的解作为最优解,其对应的无人机航迹规划策略为最优策略。
2 仿真实验
为了验证本次提出的无人机航迹规划思路的可行性与可靠性,笔者在Matlab平台上进行一组仿真实验,实验中所使用的计算机配置为:Windows2010操作系统,1.16 GHz频率CPU,16 GB运行内存。实验在多种场景下,使用设计方法与传统方法进行无人机航迹规划仿真。基于混合蚁群算法的无人机航迹规划步骤如下。
Step1:建立无人机飞行环境建模。通过公式(1)公式(2)计算飞行环境中每个山峰的坐标和受天气环境影响的概率,根据计算结果得到无人机飞行环境模型。
Step2: 混合蚁群算法参数设定。根据飞行环境情况对混合蚁群算法参数设定如下:初始信息素浓度为56.26,信息素重要程度因子設定为5.64,信息素挥发系数设定为0.56,信息素增加浓度因子设定为6.35,启发因子重要程度设定为6.48,蚁群数量设定为100,最大迭代次数设定为200。
Step3:最优无人机航迹规划方案求解。通过公式(9)~公式(11),对蚁群个体适应度计算及对蚁群迭代更新,输出全局最优,得到无人机航迹规划最优方案。
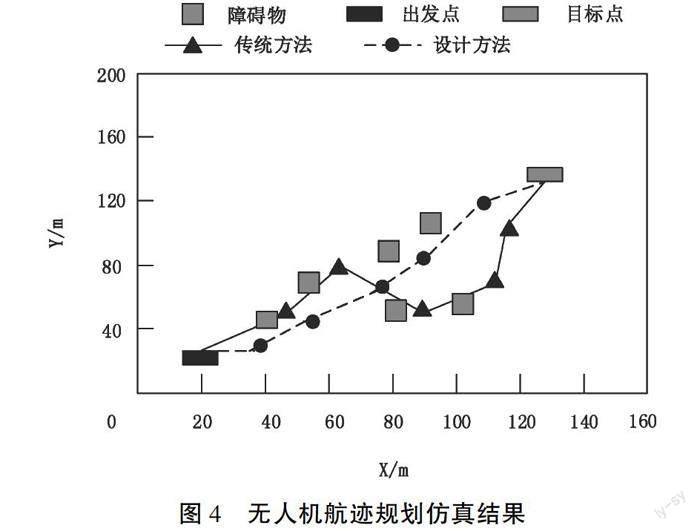
将本文设计方法与传统方法进行仿真对比,场景设计:在模拟的无人机飞行环境中设定6个威胁点。选择7个坐标点作为无人机飞行目标点,从出发点出发飞行达到8个目标点,对8次飞行航迹进行规划,以第一个飞行航迹规划为例,其仿真结果如图4所示。
从图4可以看出,设计方法规划的无人机航迹避开了所有障碍物,而传统方法规划的无人机航迹仅避开了两个障碍物,与其中4个障碍物重合,说明设计方法规划精度优于传统方法。
为了进一步验证设计方法适用性,以航迹长度为两种方法评价指标,使用电子表格记录每条飞行航迹长度,对比两种方法规划的航迹长度长短,具体数据如表1所示。
通过对表1中数据分析可以得出以下结论:采用设计方法规划的无人机航迹长度比较短,同一目标点设计方法规划的无人机航迹长度比传统方法短近894.62 m,这是因为此次采用了混合蚁群算法,保证了无人机航迹规划精度。此外,此次设计方法中对无 人机航迹三维环境进行了建模,综合无人机飞行地形环境和天气环境两个环境因素,描述出无人机航迹规划环境需求。因此实验结果证明在航迹长度方面设计方法优于传统方法,设计方法对无人机航迹目标点的目的性更强,规划的航迹长度更短。
3 结语
本文提出了一个新的规划思路,并通过实验论证了该思路的可行性与可靠性,有效缩短了无人机航迹长度,此次研究对丰富无人机航迹规划理论,具有良好的现实意义。
参考文献
[1]谢新连,何平,何傲,等.复杂水域船舶避碰路径规划研究[J]..重庆交通大学学报(自然科学版),2019(12):1-7.
[2]杨玉,金敏,鲁华祥.融合简化稀疏A*算法与模拟退火算法的无人机航迹规划[J].计算机系统应用,2019(4):25-31.
[3]陈侠,艾宇迪,梁红利.基于改进蚁群算法的无人机三维航迹规划研究[J].战术导弹技术,2019(2):59-66,105.
[4]赵江,张岩,马泽文,等.对AGV路径规划A星算法的改进与验证[J].计算机工程与应用,2018(21):217-223.
[5]宋雪倩,胡士强.基于Dubins路径的A*算法的多无人机路径规划[J].电光与控制,2018(11):25-29.
(编辑 王雪芬)
UAV path planning based on hybrid ant colony algorithm
Hao Yu, Chen Qiang
(Jiangxi University of Science and Technology,Ganzhou 341400, China)
Abstract: Due to the long flight path length planned by traditional methods in the practical application of UAV flight path planning, this paper proposes a UAV flight path planning method based on hybrid ant colony algorithm. A mathematical model of UAVs flight path environment was established by mountain peak model and weather model to describe the environment of UAVs flight path. The objective function was established with the minimum cost of UAVs flight path, and constraints were set according to the actual requirements to constrain the length, height, speed and turning Angle of UAVs flight path. The mixed ant colony algorithm was used to solve the objective function, and the optimal flight path planning strategy was obtained. The experimental results show that the shortest length of the planned flight path is 1 032.58 m, and the planned flight path length is relatively short, which has a good application prospect in UAV flight path planning.
Key words: hybrid ant colony algorithm; drones; track planning; track cost; constraint condition
