蔬菜气吸轮式精量排种器设计与试验
2023-06-12张明华姜有聪何思禹黄子顺陶婉琰
张明华,姜有聪,何思禹,黄子顺,秦 伟,钱 诚,陶婉琰,臧 英
蔬菜气吸轮式精量排种器设计与试验
张明华1,2,3,4,姜有聪1,2,何思禹1,2,黄子顺1,2,秦 伟1,2,钱 诚1,2,陶婉琰1,2,臧 英1,2,3,4※
(1. 华南农业大学工程学院/岭南现代农业科学与技术广东省实验室,广州 10642;2. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 10642;3. 广东省农业人工智能重点实验室,广州 510642;4. 华南农业大学黄埔创新研究院,广州 510715)
蔬菜类型多,种子尺寸差异大,为扩大排种器的适用范围,该研究提出一种基于扰种条辅助充种的蔬菜气吸轮式精量排种器。通过理论分析确定了排种器的关键结构参数,设计了一种带有坡度的扰种条结构,最薄处厚度为0.5 mm、最厚处厚度为1.0 mm,并对充种阶段种子在扰种条上和清种阶段的受力情况分别进行分析,确定了扰种条和清种装置结构。选取菜心、萝卜和辣椒种子为试验对象,利用台架试验获得扰种条倾角和厚度的较优值;开展较优结构参数下的排种器充种性能试验,以工作负压、排种转速和清种距离为试验因素,进行三因素三水平正交试验。试验结果表明,对于菜心种子,工作负压为0.92 kPa,排种转速为13.3 r/min,清种距离为0.70 mm时,充种合格率为99.20%,漏吸率为0.13%;对于萝卜种子,工作负压为4.47 kPa,排种转速为25.5 r/min,清种距离为1.20 mm时,充种合格率为97.34%,漏吸率0.53%;对于辣椒种子,工作负压为1.49 kPa,排种转速为16.9 r/min,清种距离为0.69 mm时,充种合格率为88.27%,漏吸率为2.67%,满足菜心、萝卜、辣椒的种植农艺要求,研究结果可为蔬菜气吸轮式精量排种器设计提供参考。
农业机械;设计;试验;气吸式排种器;精量播种;蔬菜种子
0 引 言
中国是世界上最大的蔬菜生产国和消费国[1],据2020年中国统计年鉴数据显示,全国蔬菜种植面积约为2 148.5万hm2,产量74 912.9万t[2]。菜心、萝卜、辣椒是种植广泛的蔬菜作物,其中辣椒是中国种植面积最大的蔬菜,菜心、萝卜是重要的特色蔬菜作物[3]。菜心、萝卜、辣椒等种子形态不一、种植农艺要求不同,品种适用及播种量调节难度大。2020年露地蔬菜机播率约为25%,机械化水平亟待提高[4]。因此研究适应于菜心、萝卜、辣椒的精量播种技术,可显著提高机具利用率和降低生产成本,是实现蔬菜产业可持续发展的重要途径之一[5]。
排种器是播种机的核心部件,主要分为机械式和气力式。蔬菜籽粒形态不一、易破损,机械式排种器实现蔬菜精量播种难度较大。气力式精量排种器是依靠气流完成排种作业,对种子具有较好的适应性、伤种率低、排种精度高等优点,被广泛研究与应用[6-9]。尹文庆等[10]设计了一种气力槽轮组合式蔬菜排种器,采用二级排种方式,最优参数组合下的排种合格率高于93%,但需更换不同吸嘴型孔满足不同蔬菜播种要求;夏红梅等[11-12]在充种室内增设了一种带有Y型导槽的导向振动供种装置,使种子能在导槽内形成单层、均匀的定向流动,保持各种子的姿态一致,可满足扁平茄果类种子1~2粒合格率要求。刘海等[13]设计了一种正负气压组合式精量排种器,采用双排种盘共用一个气室结构,可同时播种8行,利用DEM-CFD气固耦合动网格模型分析了各影响因素对排种性能的影响,满足小白菜的精量播种。王方艳等[14]设计了一种一器双行气力式排种器,适用于包衣胡萝卜种子的精量播种。以上研究的气力式排种器多针对单一作物,适应于菜心、萝卜、辣椒等蔬菜种子的气力式精量排种器的研究较少。
本文拟设计一种基于扰种条辅助充种的蔬菜气吸轮式精量排种器,利用力学计算、高速摄影技术和台架试验相结合,分析关键结构参数和工作参数对充种性能的影响,以期为蔬菜气吸轮式精量排种器的设计提供参考。
1 排种器结构及工作原理
蔬菜气吸轮式精量排种器整体结构如图1所示。主要由充种壳体、挡种毛刷、种层调节板、卸种板、传动轴、清种装置、法兰、排种轮、气室壳体等部件组成。排种轮通过法兰与传动轴固定连接,安装在充种壳体和气室壳体之间,固定的气室壳体与旋转的排种轮紧密贴合,形成正负压气室;排种轮周向均匀布置有扰种条和吸种孔;种层调节板位于充种壳体与排种轮形成的充种室内,调节种层高度控制充种量;挡种毛刷置于充种区始端,位于充种壳体内,防止充种区种子落入投种口造成重播;清种装置置于充种区末端,安装在充种壳体上,清除吸种孔吸附的多余种子。
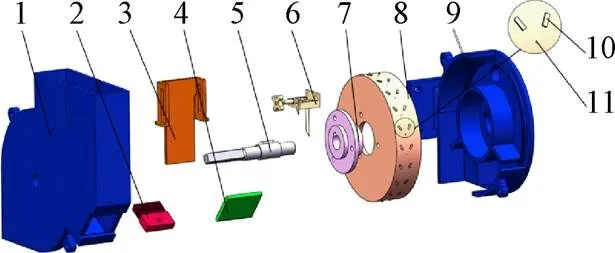
1.充种壳体 2.挡种毛刷 3.种层调节板 4.卸种板 5.传动轴 6.清种装置 7.法兰 8.排种轮 9.气室壳体 10.扰种条 11.吸种孔
排种器工作时,将种层调节板调整至合适高度,种箱内的种子在重力作用下进入充种区(如图2)形成堆积,传动轴带动排种轮逆时针转动,排种轮上的扰种条对种群造成扰动并破坏其稳定堆积状态,与排种轮接触的薄层种子在扰种条的作用下从种群中分离出来,随后从扰种条倾斜面滑落至吸种孔附近,在气流作用下与外界形成负压气流,通过负压气室传递给吸种孔处,使种子被吸种孔吸附。种子随排种轮旋转至清种区,由清种装置将吸种孔附近多余的种子清落回充种区,完成单粒取种。种子在负压作用下通过携种区,进入投种区,此时吸种孔对应的正压气室与风机的正压口相接,吸种孔处产生正压,种子在重力、离心力和正压气流的共同作用下与吸种孔分离,完成投种。排种轮旋转至过渡区,为下一次充种做准备。

Ⅰ.充种区 Ⅱ.清种区 Ⅲ.携种区 Ⅳ.投种区 Ⅴ.过渡区
Ⅰ. Seed filling area Ⅱ. Seed cleaning area Ⅲ. Seed carrying area Ⅳ. Seed cropping area Ⅴ. Seed transition area
注:为排种轮角速度,rad·s-1。
Note:is the angular velocity of the seeding wheel, rad·s-1.
图2 排种器工作区域划分
Fig.2 Working area division of seed metering device
2 排种器关键参数设计
2.1 蔬菜种子三轴尺寸
排种器关键部件设计以蔬菜种子的物料特性为依据。为提高排种器对品种的适应性,本文选用外形和尺寸差异较大的菜心、萝卜和辣椒种子为研究对象,品种分别为“四九-19”、“短叶13号”和“吨椒传奇”。分别随机选取3种蔬菜种子各150粒,用精度为0.01 mm的数显游标卡尺对种子的三轴尺寸进行测量,统计结果如表1所示。菜心种子呈类球形,球度最大,平均长度1.63 mm,平均宽度1.53 mm,平均厚度1.48 mm;萝卜种子呈椭球形,尺寸较大,厚度略扁,平均长度3.67 mm,平均宽度2.91 mm,平均厚度1.98 mm;辣椒种子呈圆形扁平状,球度最小,平均长度3.66 mm,平均宽度3.02 mm,平均厚度0.77 mm。

表1 蔬菜种子三轴尺寸统计表
2.2 排种轮直径
排种轮是排种器的核心部件之一,其直径大小对其他各部件结构参数确定至关重要[15-16]。排种转速和充种时间的关系如下:
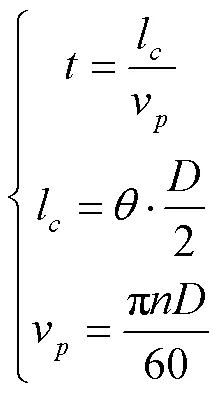
式中为充种时间,s;l为充种弧长,mm;v为排种轮线速度,mm/s;为排种轮直径,mm;为充种角,rad;为排种转速,r/min。
由式(1)可得:

由式(2)可知,充种时间与充种角成正比,与排种转速成反比,与排种轮直径无关,因此增大排种轮直径并不能延长充种时间。现有排种轮直径选取范围一般为140~260 mm[17],综合考虑排种器整体设计,本文选取排种轮直径为150 mm,材料为光敏树脂。
2.3 排种轮吸种孔数
吸种孔参数是影响充种性能的重要因素,播种机作业速度和株距一定时,吸种孔数量越多,排种转速越低,有利于提高充种性能[18]。但吸种孔数量过多,会使被前一扰种条和吸种孔作用后的种子层,没有足够的时间和空间恢复与排种轮的接触,导致漏吸率上升。排种轮吸种孔数量计算式为
式中v为播种机作业速度,m/s;为株距,m。
播种机作业速度为0.56~1.39 m/s,排种转速为10~30 r/min[19-20]。根据种植农艺要求[21-22],菜心株距为0.10~0.30 m,由式(3)得10≤≤30;萝卜株距为0.14~0.25 m,则10≤≤21.4;辣椒株距为0.15~0.30 m,则10≤≤20。综合考虑扰种条安装位置和充种性能,本文选择吸种孔数量为20,相邻吸种孔中心角为18°。
2.4 吸种孔直径
吸种孔直径由种子尺寸确定[23],即:
=(0.64~0.66)(4)
式中为吸种孔直径,mm;为种子宽度,mm。
吸种孔直径越大,转速越高时所需吸附压强越小,但过大会导致种子堵塞吸种孔,影响充种性能。为满足多种蔬菜播种需求,以较小蔬菜种子菜心计算,确定排种轮吸种孔直径为1.0 mm。
2.5 扰种条
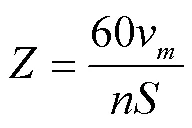
当种子成堆静止或缓慢流动时,种子不易被吸种孔吸附造成漏吸,利用扰种条可打破充种室内种群堆积状态,同时引导种子朝吸种孔移动,利于被吸种孔吸附[24-27]。本文设计了一种扰种条,其长度L为6 mm、宽度H为2 mm的矩形长条[28],长轴方向与吸种孔相切,紧贴于排种轮外表面。扰种条的主要结构参数为厚度D和倾角,设扰种条间距为,如图3所示。
注:Dr为扰种条厚度,mm;Hr为扰种条宽度,mm;Lr为扰种条长度,mm;H为扰种条间距,mm。
扰种条厚度过小,对种子的扰动效果差,不能充分扰动种群,充种效果较差;扰种条厚度过大,对种子的扰动效果强,种群运动剧烈,但会出现扰种条携种现象,造成播种精度降低。因此,扰种条应仅扰动贴近排种轮表面的一薄层种子为宜[29],即满足
D=(0.8~1.0)d(5)
式中d为种子厚度,mm。
辣椒种子厚度最小,d为0.56~1.04 mm,则扰种条厚度D范围为0.45~1.04 mm。根据相关文献[30],分别设计厚度为0.5、1.0 mm的扰种条,如图4,其中图4b为带有坡度的扰种条,最薄处厚度为0.5 mm、最厚处厚度为1.0 mm(下文简称0.5~1.0 mm)。
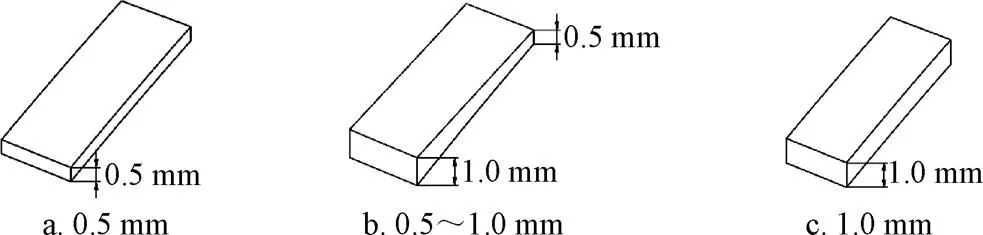
图4 扰种条厚度示意图
扰种条间距小于2倍种子长度时,会产生扰种条夹持种子的现象,导致重吸率增大,因此应使>2,其中为种子平均长度,由此可得,扰种条间距应大于7.34 mm,综合考虑确定扰种条间距8 mm。
以单粒种子为研究对象,假定其为一刚性质点,以种子质心为原点建立空间直角坐标系,如图5所示,轴垂直于扰种条倾斜面,轴平行于扰种条倾斜面,轴通过种子与排种轮接触点且垂直于排种轮表面。
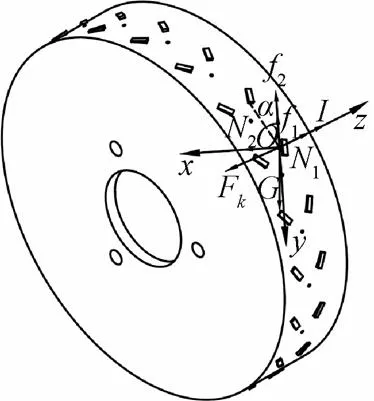
注:x、y、z为坐标轴;O为种子质心(坐标系原点);N1为排种轮表面对种子的支持力,N;N2为扰种条对种子的支持力,N;G为种子重力,N;f1为种子与排种轮表面摩擦力,N;f2为种子与扰种条表面摩擦力,N;α为扰种条倾角,(°);Fk为科氏力,N;I为离心力,N。
为使种子沿扰种条向吸种孔处靠近,应确保其有沿轴正向运动的趋势,即各力在轴的分力之和为正,即
G>1+2(6)
根据种子在扰种条上的受力(图6)可知种子在方向上的受力方程为

其中

式中1为种子与排种轮间的滑动摩擦系数;为种子质量,kg;v为种子相对速度,m/s;为排种轮半径,m;为重力加速度,9.81 m/s2。
将式(7)和(8)代入式(6)可得:

由式(9)可知,影响种子与扰种条相对运动的参数有排种转速、种子与排种轮间的滑动摩擦系数1、排种轮半径、充种角与扰种条倾角。扰种条倾角越小,越有利于提高种子的流动。扰种条倾角上限值应小于90°减自然休止角[31],试验测得菜心、萝卜、辣椒自然休止角分别为 27.32°、37.47°、34.15°,为便于加工,取上限值为50°。扰种条倾角过小时,扰种条对种群扰动范围小,充种性能下降,通过预试验测得,扰种条倾角下限值为10°。
注:为充种角,(°);G为重力以充种角分解的切向力,N;G为重力在轴方向的分力,N;G为重力在轴方向的分力,N,G为重力在轴方向的分力,N。
Note:is seed filling angle, (°);Gis the tangential force of gravitydecomposed by the seed filling angleN;Gis the component force of gravityin the-axis direction, N;Gis the component force of gravityin the-axis direction, N;Gis the component force of gravityin the-axis direction, N.
图6 扰种过程受力投影图
Fig.6 Projection diagram of the forces on the seed disturbance process
2.6 清种装置
种子在被吸种孔吸附时,吸种孔不能完全密封,会出现重吸现象,影响播种精度[32-33]。为能够有效地清除吸种孔上吸附的多粒种子,满足不同类型种子的清种要求,本文采用拨指式清种装置,如图7所示,清种拨指固定在调节齿条上,可根据不同种子外形尺寸转动清种调节手柄,调节清种距离S,即清种拨指前端面与吸种孔中心的相对距离。利用一侧清种拨指使种子与其发生碰撞清种,并将吸种孔处未被清除的多余种子挤压向另一侧,再用另一侧清种拨指对其进一步清种,使吸种孔处多余种子在推力作用下脱离吸种孔落回充种区,完成清种。

1.清种调节手柄 2.调节齿条 3.吸种孔 4.调节齿轮 5.清种拨指 6.调节座
当种子随排种轮转动至清种阶段时,种子受力情况如图8所示。
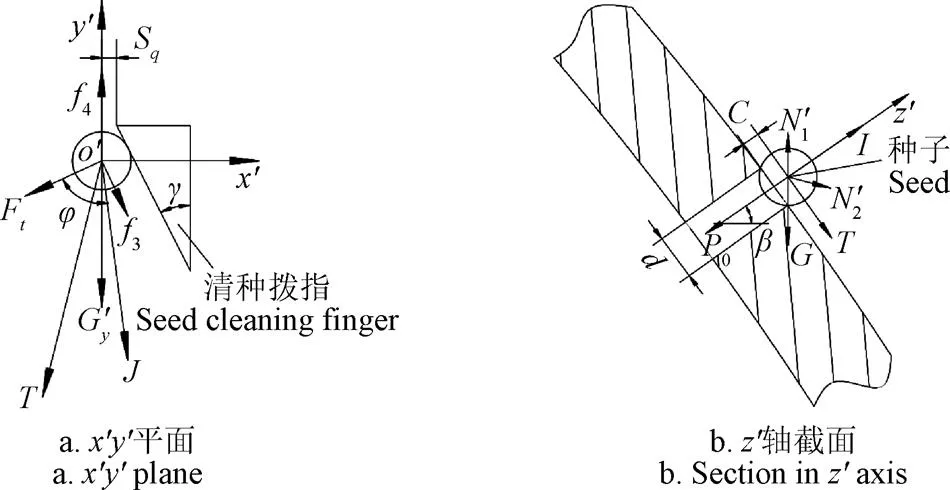
注:x′、y′、z′为坐标轴;O′为坐标系原点;P0为清种阶段种子所受吸附力,N;Ft为清种装置对种子的推力,N;f3为清种装置对种子的摩擦力,N;f4为清种阶段排种轮对种子的摩擦力,N;d为吸种孔直径,mm;N1′、N2′为吸种孔侧壁对种子的支持力,N;Gy’为重力G在y’轴方向的分力,N;J为Gy’与f3的合力,N;T为J与Ft的合力,N;β为受力点与水平方向夹角,(°);γ为清种装置倾角,(°);φ为J与Ft之间的夹角,(°);C为种子重心与排种轮之间的距离,m;Sq为清种距离,m。
将种子所受的力分解为平行于排种轮与垂直于排种轮的力,其中排种轮对种子的摩擦力4起到阻碍种子脱离的作用,为保证吸附更加稳固,可忽略不计[34],因此被吸种孔稳定吸附且随排种轮同步转动不发生脱离的平衡条件为
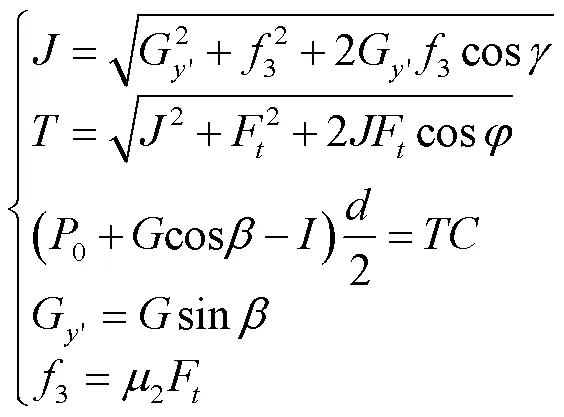
式中2为种子与清种拨指间的滑动摩擦系数。
由式(10)可得
由式(11)可知,在排种轮结构和工作条件确定的情况下,清种装置对种子的推力F越大,种子稳定吸附所受吸附力0越大。因此增加清种装置对种子的推力F,会增大重吸种子稳定吸附所受的吸附力0,打破了原本稳定吸附的平衡状态,将吸种孔附近多余种子清除。因此将清种拨指设计为逐渐逼近吸种孔的结构,逐渐增大对重吸种子的推力,实现清种功能。
3 排种器性能试验
3.1 材料与方法
3.1.1 试验材料与装置
试验材料为“四九-19”菜心种子、“短叶13号”萝卜种子、“吨椒传奇”辣椒种子。排种装置试验台如图9所示,主要包括排种器、51K120RGN-CF型驱动电机、电机调速器、WS9250型风机、气力管道、FASTCAMSUPER 10K高速摄像机。其中,排种轮采用光敏树脂材料3D打印而成;通过切割排种器观察充种效果,利用高速摄像机记录观察区影像,统计充种情况。
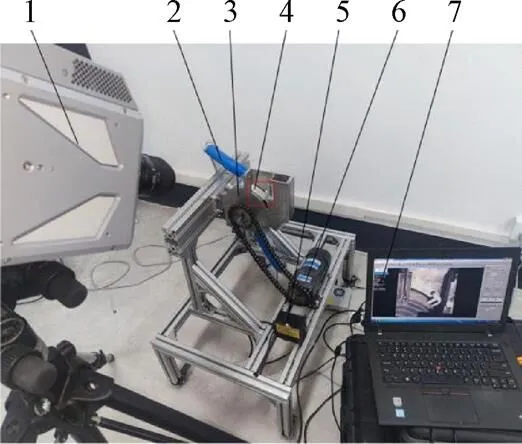
1.高速摄像机 2.气力管道 3.排种器 4.观察区 5.驱动电机 6.电机调速器 7.计算机
3.1.2 试验方案
通过前期预试验和相关文献[10],调节排种转速为20 r/min,工作负压为1.00、4.00、1.50 kPa,清种距离为0.75、1.25、0.75 mm,分别进行扰种条倾角和扰种条厚度对充种性能影响的试验。根据上述分析,扰种条倾角取值范围为10°~50°,选择10°、30°、50°共3个水平;扰种条厚度选择0.5、0.5~1.0、1.0 mm 共3个水平进行试验。试验因素水平如表2所示。
以优选出的扰种条结构为对象,采用三因素三水平正交试验方法,选取工作负压、排种转速和清种距离为试验因素,进行工作参数对充种性能影响的试验。试验因素水平如表3所示。

表2 扰种条结构对充种性能影响的试验因素水平表

表3 工作参数对充种性能影响的试验因素水平表
3.1.3 评价指标
每组试验统计250粒种子,重复3次,取平均值为试验结果[35]。选取充种合格率、重吸率和漏吸率为评价指标,计算式如下:

式中0为吸附0粒种子的吸种孔数量;1为吸附1粒种子的吸种孔数量;2为吸附大于1粒种子的吸种孔数量。
3.2 结果与分析
3.2.1 扰种条结构对充种性能的影响
由表4可知,扰种条倾角、扰种条厚度对充种性能的影响因种子不同存在差异。扰种条倾角对菜心漏吸率影响显著(<0.05),对萝卜充种合格率影响极显著(<0.01),对萝卜漏吸率影响显著(<0.05);扰种条厚度对萝卜重吸率和漏吸率影响极显著(<0.01),对萝卜充种合格率影响显著(<0.05);扰种条倾角和扰种条厚度对辣椒充种性能指标影响均极显著(<0.01)。将各结构参数充种合格率取均值,确定较优参数值为扰种条倾角为30°,扰种条厚度为0.5~1.0 mm。
3.2.2 工作参数对充种性能的影响
基于优选出的扰种条结构,采用Design-Expert软件进行数据处理和统计分析,试验结果如表5所示。

表4 扰种条结构对充种性能影响的试验结果
注:“*”表示影响显著(<0.05),“**”表示影响极显著(<0.01)。下同。
Note: “*” means significant impact (<0.05), “**” means extremely significant impact (<0.01). The same below.
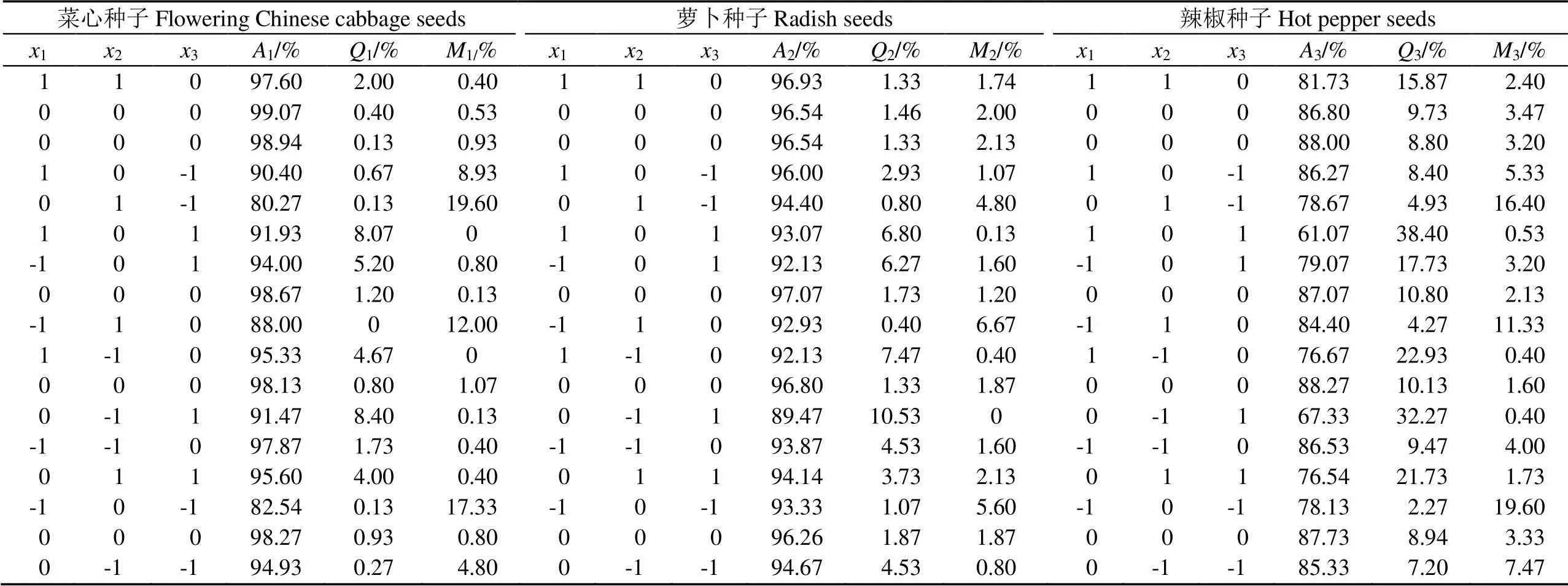
表5 工作参数对充种性能影响的试验结果
注:1、2、3分别为1、2、3的水平值;1、2、3分别为菜心、萝卜、辣椒的充种合格率;1、2、3分别为菜心、萝卜、辣椒的重吸率;1、2、3分别为菜心、萝卜、辣椒的漏吸率。
Note:1,2,3are the level values of1,2and3respectively.1,2,3are the qualified rate of flowering Chinese cabbage, radish and hot pepper respectively;1,2,3are the multiple rate of flowering Chinese cabbage, radish and hot pepper respectively;1,2,3are the missing rate of flowering Chinese cabbage, radish and hot pepper respectively.
表6为充种合格率、重吸率和漏吸率回归模型的方差分析,从表中可知,充种合格率、重吸率和漏吸率对菜心、萝卜、辣椒种子的回归模型拟合度均为极显著(<0.01),且回归方程失拟项不显著(>0.05),模型与实际情况拟合较好。
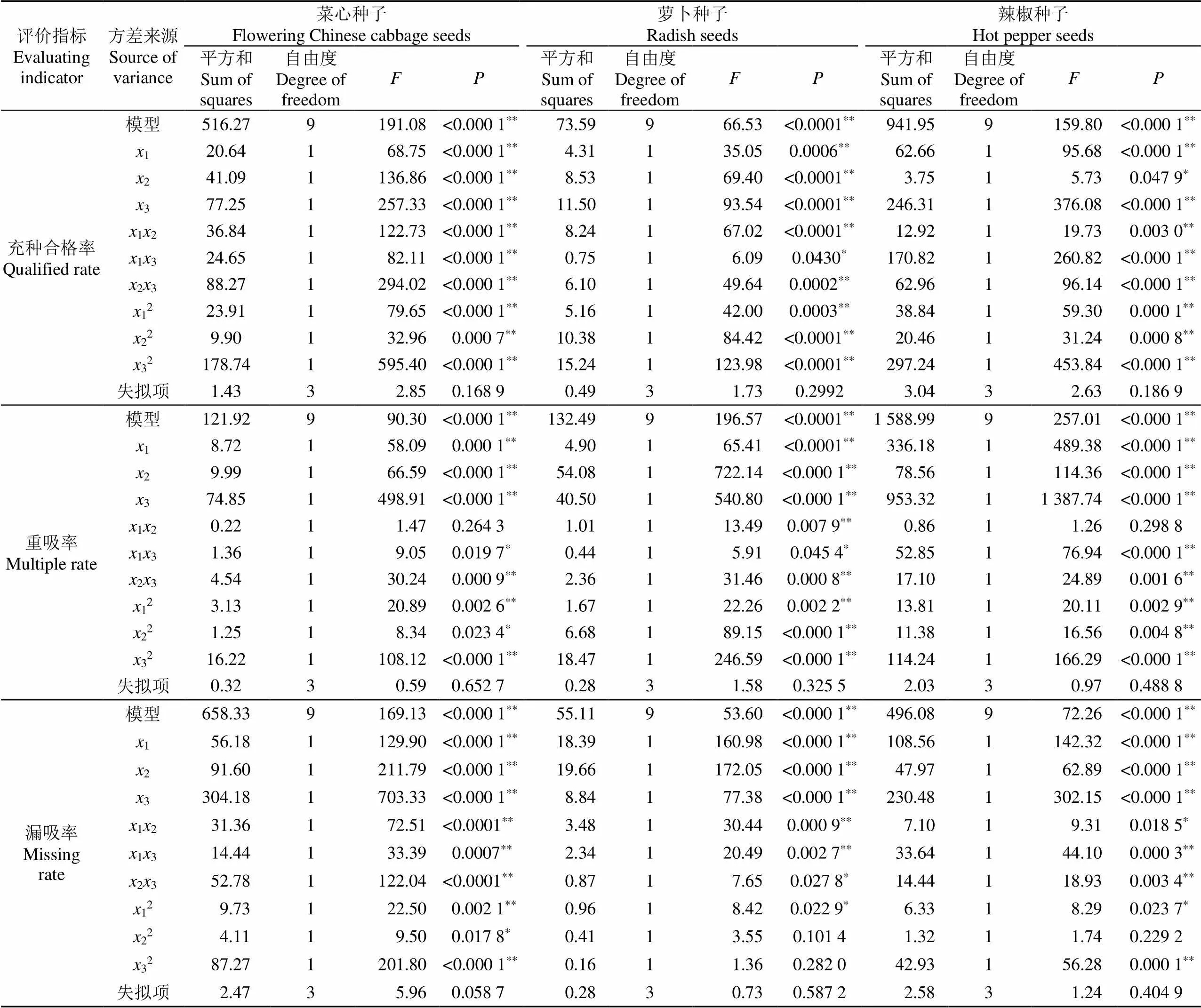
表6 充种合格率、重吸率和漏吸率回归模型的方差分析
剔除对试验指标影响不显著因素,分别建立菜心充种合格率1、重吸率1、漏吸率1与排种转速1、工作负压2和清种距离3之间的回归方程,如式(13)所示。
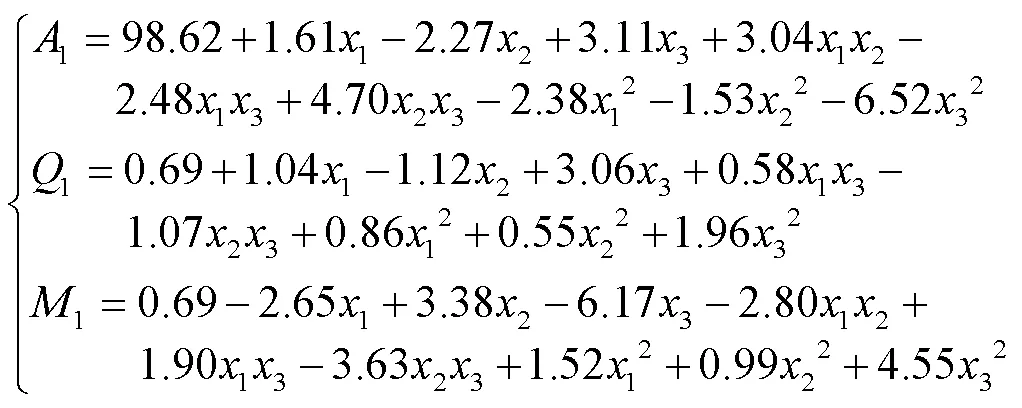
由表6和式(13)可知,回归项1、2、3、12、13、23、12、22、32对菜心充种合格率1影响极显著(<0.01);回归项1、2、3、23、12、32对菜心重吸率1影响极显著(<0.01),回归项13、22对菜心重吸率1影响显著(<0.05);回归项1、2、3、12、13、23、12、32对菜心漏吸率1影响极显著(<0.01),回归项22对菜心漏吸率1影响显著(<0.05)。影响菜心充种合格率、重吸率、漏吸率的因素主次顺序为清种距离、排种转速、工作负压。
式(14)为萝卜充种合格率2、重吸率2、漏吸率2与排种转速1、工作负压2和清种距离3之间的回归方程。
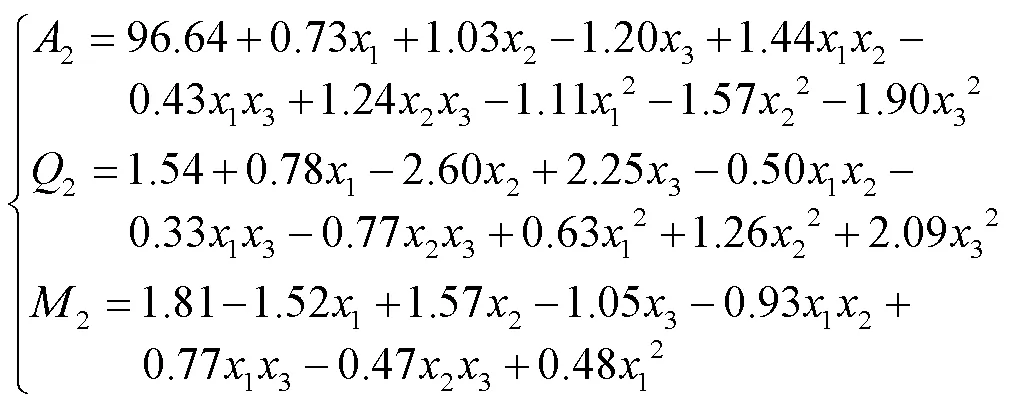
由表6和式(14)可知,回归项1、2、3、12、23、12、22、32对萝卜充种合格率2影响极显著(<0.01),回归项13对萝卜充种合格率2影响显著(<0.05);回归项1、2、3、12、23、12、22、32对萝卜重吸率2影响极显著(<0.01),回归项13对萝卜重吸率2影响显著(<0.05);回归项1、2、3、12、13对萝卜漏吸率2影响极显著(<0.01),回归项23、12对萝卜漏吸率2影响显著(<0.05)。影响萝卜充种合格率的因素主次顺序为清种距离、排种转速、工作负压;影响萝卜重吸率因素主次顺序为排种转速、清种距离、工作负压;影响萝卜漏吸率因素主次顺序为排种转速、工作负压、清种距离。
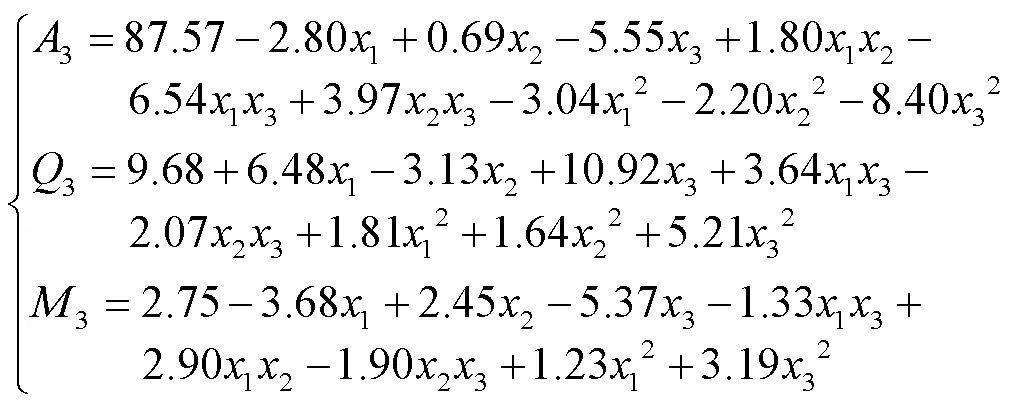
式(15)为辣椒充种合格率3、重吸率3、漏吸率3与排种转速1、工作负压2和清种距离3之间的回归方程。
由表6和式(15)可知,回归项1、3、12、13、23、12、22、32对辣椒充种合格率3影响极显著(<0.01),回归项2对辣椒充种合格率3影响显著(<0.05);回归项1、2、3、13、23、12、22、32对辣椒重吸率3影响极显著(<0.01);回归项1、2、3、13、23、32对辣椒漏吸率3影响极显著(<0.01),回归项12、12对辣椒漏吸率3影响显著(<0.05)。影响辣椒充种合格率、重吸率、漏吸率的因素主次顺序为清种距离、工作负压、排种转速。
3.2.3 因素交互作用对充种合格率的影响
图10a为试验因素交互作用对菜心充种合格率的影响,当清种距离为0.75 mm,工作负压为低水平时,菜心充种合格率随排种转速增加而降低;工作负压为高水平时,充种合格率随排种转速增加呈先增大后降低的趋势;排种转速为低水平时,菜心充种合格率随工作负压增加呈先增大后降低的趋势,排种转速为高水平时,充种合格率随工作负压增加而增大。在排种转速为10~25 r/min,工作负压0.50~1.50 kPa时,菜心充种合格率较高。当排种转速为20 r/min,工作负压一定时,菜心充种合格率随清种距离增加呈先增大后降低的趋势;清种距离一定时,菜心充种合格率随工作负压增加也呈先增大后降低的趋势。在清种距离0.70~0.90 mm,工作负压0.70~1.50 kPa时,菜心充种合格率较高。当工作负压为1.00 kPa,清种距离为低水平时,菜心充种合格率随排种转速增加而降低;清种距离为高水平时,菜心充种合格率随排种转速增加而增大;排种转速一定时,菜心充种合格率随清种距离增加呈先增大后降低的趋势。当清种距离为0.60~0.90 mm,排种转速为10~25 r/min时,菜心充种合格率较高。
图10b为试验因素交互作用对萝卜充种合格率的影响,当清种距离为1.25 mm,工作负压为低水平时,萝卜充种合格率随排种转速增加呈先增大后降低的趋势;工作负压为高水平时,充种合格率随排种转速增加而增大;排种转速为低水平时,萝卜充种合格率随工作负压增加呈先增大后降低的趋势,排种转速为高水平时,充种合格率随工作负压增加而增大。在排种转速为22~30 r/min,工作负压4.10~4.50 kPa时,萝卜充种合格率较高。当排种转速为20 r/min,工作负压一定时,萝卜充种合格率随清种距离增加呈先增大后降低的趋势;清种距离一定时,萝卜充种合格率随工作负压增加也呈先增大后降低的趋势。在清种距离1.15~1.20 mm,工作负压4.30~4.40 kPa时,萝卜充种合格率较高。当工作负压为4.00 kPa,清种距离一定时,萝卜充种合格率随排种转速增加呈先增大后降低的趋势;当排种转速一定时,萝卜充种合格率随清种距离增加也呈先增大后降低的趋势。当清种距离为1.00~1.35 mm,排种转速为14~30 r/min时,萝卜充种合格率较高。
图10c为试验因素交互作用对辣椒充种合格率的影响,当清种距离为0.75 mm,工作负压一定时,辣椒充种合格率随排种转速增加呈先增大后降低的趋势;排种转速一定时,辣椒充种合格率随工作负压增加也呈先增大后降低的趋势。在排种转速为16~24 r/min,工作负压1.10~1.50 kPa时,辣椒充种合格率较高。当排种转速为20 r/min,工作负压一定时,辣椒充种合格率随清种距离增加呈先增大后降低的趋势;清种距离低水平时,辣椒充种合格率随工作负压增加呈先增大后降低的趋势;清种距离高水平时,辣椒充种合格率随工作负压增加而降低。在清种距离0.60~0.80 mm,工作负压1.10~1.70 kPa时,辣椒充种合格率较高。当工作负压为1.50 kPa,清种距离低水平时,辣椒充种合格率随排种转速增加呈先增大后降低的趋势;清种距离高水平时,辣椒充种合格率随排种转速增加而增大;当排种转速一定时,辣椒充种合格率随清种距离增加呈先增大后降低的趋势。当清种距离为0.55~0.75 mm,排种转速为12~24 r/min时,辣椒充种合格率较高。
3.3 参数优化
为获得排种器的最佳工作参数组合,以排种器充种合格率最大,重吸率和漏吸率最小为目标函数,结合因素边界条件,对评价指标回归模型进行多目标优化求解。优化目标函数和约束条件为

运用Design Expert软件求解,对于菜心种子,工作负压为0.92 kPa,排种转速为13.3 r/min,清种距离为0.70 mm时,目标函数预测值分别为充种合格率99.13%、重吸率0.87%、漏吸率0%;对于萝卜种子,工作负压为4.47 kPa,排种转速为25.5 r/min,清种距离为1.20 mm时,目标函数预测值分别为充种合格率97.30%、重吸率1.29%、漏吸率1.41%;对于辣椒种子,工作负压为1.49 kPa,排种转速为16.9 r/min,清种距离为0.69 mm时,目标函数预测值分别为充种合格率88.33%、重吸率8.22%、漏吸率3.45%。
对优化后的参数进行试验验证,在相同的试验条件下重复验证试验3次,根据试验结果可知,对于菜心种子,充种合格率为99.20%,重吸率为0.67%,漏吸率为0.13%;对于萝卜种子,充种合格率为97.34%,重吸率为2.13%,漏吸率0.53%;对于辣椒种子,充种合格率为88.27%,重吸率为9.06%,漏吸率为2.67%,与理论优化结果基本吻合,验证了优化结果的准确性。
4 结 论
1)蔬菜类型多,种子尺寸差异大,为扩大排种器的适用范围,设计了一种基于扰种条辅助充种的蔬菜气吸轮式精量排种器,阐明了排种器的工作过程、原理及主要结构参数。
2)对扰种条结构参数进行试验,以扰种条倾角和扰种条厚度为试验因素,扰种条倾角为30°、扰种条厚度为0.5~1.0 mm时,3种蔬菜种子的充种合格率较高。
3)基于上述扰种条结构,以工作负压、排种转速、清种距离为试验因素,进行三因素三水平正交试验,试验表明,在较优结构参数和工作参数条件下菜心、萝卜、辣椒种子的充种合格率分别为99.20%、97.34%、88.27%,重吸率分别为0.67%、2.13%、9.06%,漏吸率分别为0.13%、0.53%、2.67%,满足菜心、萝卜、辣椒种植农艺要求。
[1] 管春松,崔志超,高庆生,等. 蔬菜精量直播技术及装备的研究现状[J]. 中国蔬菜,2018,(12):9-15.
[2] 国家统计局. 中国统计年鉴[J]. 北京:中国统计出版社,2020.
[3] 邹学校,马艳青,戴雄泽,等. 辣椒在中国的传播与产业发展[J]. 园艺学报,2020,47(9):1715-1726.
ZOU Xuexiao, MA Yanqing, DAI Xiongze, et al. Spread and industry development of pepper in China[J]. Acta Horticulturae Sinica, 2020, 47(9): 1715-1726. (in Chinese with English abstract)
[4] 李兆东,杨文超,张甜,等. 油菜高速精量排种器槽齿组合式吸种盘设计与吸附性能试验[J]. 农业工程学报,2019,35(1):12-22.
LI Zhaodong, YANG Wenchao, ZHANG Tian, et al. Design and suction performance test of sucking-seed plate combined with groove-tooth structure on high speed precision metering device of rapeseed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 12-22. (in Chinese with English abstract)
[5] 吴传云,温浩军,吴崇友,等. 我国主要经济作物机械化主攻方向与主推技术[J]. 中国农机化学报,2021,42(12):195-204.
WU Chuanyun, WEN Haojun, WU Chongyou, et al. Main directions and push technologies of economic crops mechanization in China[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(12): 195-204. (in Chinese with English abstract)
[6] GAIKWAD B, SIROHI N. Design of a low-cost pneumatic seeder for nursery plug trays[J]. Biosystems Engineering, 2008, 99: 322-329.
[7] XING H, WANG M, LUO W, et al. Design and experiment analysis of rice pneumatic seeder with adjustable seeding rate[J]. International Journal of Agricultural and Biological Engineering, 2021; 14(4): 113-122.
[8] IBRAHIM E, LIAO X, WANG L, et al. Design and experiment of multi-row pneumatic precision metering device for rapeseed[J]. International Journal of Agricultural and Biological Engineering, 2018; 11(5): 116-123.
[9] LI H, AHMAD R, QI D. Design evaluation and performance analysis of a double-row pneumatic precision metering device for brassica chinensis[J]. Sustainability, 2021, 13(3): 1374.
[10] 尹文庆,赵璐,李骅,等. 气力槽轮组合式蔬菜精密排种器吸嘴型孔设计与试验[J]. 农业机械学报,2019,50(4):68-76,136. YIN Wenqing, ZHAO Lu, LI Hua, et al. Design and experiment on suction nozzle type hole of pneumatic-sheave combined vegetable precision metering device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 68-76, 136. (in Chinese with English abstract)
[11] 夏红梅,周士琳,刘园杰,等. 扁平茄果类种子导向振动供种装置设计与试验[J]. 农业机械学报,2020,51(9):82-88. XIA Hongmei, ZHOU Shilin, LIU Yuanjie, et al. Design and test of directional vibrating seed-feeding device for flat solanaceous vegetable seeds[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 82-88. (in Chinese with English abstract)
[12] 张静,李志伟,刘皞春,等. 气力滚筒式排种器种子吸附边界模型及验证[J]. 农业工程学报,2016,32(23):12-20.
ZHANG Jing, LI Zhiwei, LIU Haochun, et al. Mathematical modeling and validation of seeder’s suction-boundary on pneumatic-roller type metering[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(23): 12-20. (in Chinese with English abstract)
[13] 刘海,廖宜涛,王磊,等. 小白菜正负气压组合式精量排种器设计与试验[J]. 农业机械学报,2022,53(10):54-65.
LIUhai, LIAO Yitao, WANG Lei, et al. Design and experiment of positive and negative pressure combination precision metering device for Pakchoi[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 54-65. (in Chinese with English abstract)
[14] 王方艳,杨亮,鲍余峰,等. 气吸式胡萝卜起垄播种一体机研制[J]. 农业工程学报,2020,36(17):35-45.
WANG Fangyan, YANG Liang, BAO Yufeng, et al. Development of air-suction ridging and seeding machine for carrot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(17): 35-45. (in Chinese with English abstract)
[15] 王芳,吕冰,王洪明,等. 气吸式谷子排种装置吸种孔的结构设计与试验[J]. 农业工程学报,2017,33(8):30-36.
WANG Fang, LYU Bing, WANG Hongming, et al. Structural design and test of seed-suction hole of air-sucking seed-metering device for millet[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 30-36. (in Chinese with English abstract)
[16] 曹秀龙,马旭,李宏伟,等. 气吸滚筒式油菜穴盘育苗精密排种器设计与试验[J]. 农业工程学报,2021,37(2):51-60.
CAO Xiulong, MA Xu, LI Hongwei, et al. Design and experiments of pneumatic roller type precision seed-metering device for rapeseed plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(2): 51-60. (in Chinese with English abstract)
[17] ZHAO S, RAN J, HAO J, et al. Design and experiment of the double-seed hole seeding precision seed metering device for peanuts[J]. International Journal of Agricultural and Biological Engineering, 2022; 15(3): 107-114.
[18] 陈海涛,李桐辉,王洪飞,等. 气吸滚筒式垄上三行大豆密植排种器设计与参数优化[J]. 农业工程学报,2018,34(17):16-24.
CHEN Haitao, LI Tonghui, WANG Hongfei, et al. Design and parameter optimization of pneumatic cylinder ridge three-row close-planting seed-metering device for soybean[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(17): 16-24. (in Chinese with English abstract)
[19] 廖宜涛,廖庆喜,王磊,等. 气力式小粒径种子精量排种器吸种效果影响因素研究[J]. 农业工程学报,2018,34(24):10-17.
LIAO Yitao, LIAO Qingxi, WANG Lei, et al. Investigation on vacuum singulating effect influencing factors of pneumatic precision seed metering device for small particle size of seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(24): 10-17. (in Chinese with English abstract)
[20] 王宝山,王磊,廖宜涛,等. 小粒径种子精量穴播集排器型孔轮设计与试验[J]. 农业机械学报,2022,53(11):64-75,119.
WANG Baoshan, WANG Lei, LIAO Yitao, et al. Design and test of seeding wheels of precision hole-seeding centralized metering device for small particle size seeds[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(11): 64-75, 119. (in Chinese with English abstract)
[21] 崔志超,杨雅婷,刘先才,等. 我国萝卜机械化生产现状及发展建议[J]. 中国蔬菜,2020(8):1-8.
[22] 曾山,姚腊梅,李凝,等. 气吸式辣椒精量穴直播机的研制与试验[J]. 华南农业大学学报,2020,41(3):102-109.
ZENG Shan, YAO Lamei, LI Ning, et al. Development and test of an air-suction type precision direct seeding machine for pepper[J]. Journal of South China Agricultural University, 2020, 41(3): 102-109. (in Chinese with English abstract)
[23] 张波屏. 播种机械设计原理[M]. 北京:机械工业出版社,1982.
[24] 丁力,杨丽,刘守荣,等. 辅助充种种盘玉米气吸式高速精量排种器设计[J]. 农业工程学报,2018,34(22):1-11.
DING Li, YANG Li, LIU Shourong, et al. Design of air suction high speed precision maize seed metering device with assistant seed filling plate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(22): 1-11. (in Chinese with English abstract)
[25] 李玉环,魏亚男,杨丽,等. 扰动促充机械式绿豆精量排种器设计与试验[J]. 农业机械学报,2020,51(S1):43-53.
LI Yuhuan,WEI Ya’nan,YANG Li,et al. Design and experiment of mung bean precision seed-metering device with disturbance for promoting seed filling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 43-53. (in Chinese with English abstract)
[26] 谢东波,张春岭,吴晓庆,等. 扰种齿辅助气吸式大蒜排种器设计与试验[J]. 农业机械学报,2022,53(2):47-57.
XIE Dongbo, ZHANG Chunling, WU Xiaoqing, et al. Design and test of garlic seed placer with seed disturbing tooth assisted air suction[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(2): 47-57. (in Chinese with English abstract)
[27] JIA L, CHEN L, ZHAO L, et al. Design and key parameter optimization of an agitated soybean seed metering device with horizontal seed filling[J]. International Journal of Agricultural and Biological Engineering, 2018, 11(2): 76-87.
[28] 丛锦玲,余佳佳,曹秀英,等. 油菜小麦兼用型气力式精量排种器[J]. 农业机械学报,2014,45(1):46-52. CONG Jinling, YU Jiajia, CAO Xiuying, et al. Design of dual-purpose pneumatic precision metering device for rape and wheat[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1): 46-52. (in Chinese with English abstract)
[29] 张国忠,臧英,罗锡文,等.水稻气力式排种器导向型搅种装置的设计与试验[J]. 农业工程学报,2013,29(12):1-8.
ZHANG Guozhong, ZANG Ying, LUO Xiwen, et al. Design and experiment of oriented seed churning device on pneumatic seed metering device for rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 1-8. (in Chinese with English abstract)
[30] 王宝龙,王在满,罗锡文,等. 杂交稻气力滚筒集排式排种器楔形搅种装置设计与试验[J]. 农业工程学报,2019,35(23):1-8.
WANG Baolong, WANG Zaiman, LUO Xiwen, et al. Design and experiment of wedge churning device for pneumatic cylinder-type seed metering device for hybrid rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(23): 1-8. (in Chinese with English abstract)
[31] 丛锦玲,廖庆喜,曹秀英,等. 油菜小麦兼用排种盘的排种器充种性能[J]. 农业工程学报,2014,30(8):30-39.
CONG Jinling, LIAO Qingxi, CAO Xiuying, et al. Seeding filling performance of dual-purpose seed plate in metering device for both rapeseed & wheat seed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 30-39. (in Chinese with English abstract)
[32] HE Y, ZANG Y, HUANG S, et al. Design of and experiment on a cleaning mechanism of the pneumatic single seed metering device for coated hybrid rice[J]. Agriculture, 2022, 12(8): 1239.
[33] HU J, XIA F, ZHOU K, et al. Design and experiment of seed-cleaning mechanism for inside-filling pneumatic cotton precision seed-metering device[J]. Agriculture, 2022, 12(8): 1217.
[34] 李玉环,杨丽,张东兴,等. 气吸式玉米精量排种器双侧清种装置设计与试验[J]. 农业机械学报,2021,52(7):29-39. LI Yuhuan, YANG Li, ZHANG Dongxing, et al. Design and test of double-side cleaning mechanism for air-suction maize seed-metering device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(7): 29-39. (in Chinese with English abstract)
[35] 臧英,何思禹,王在满,等. 气力式包衣杂交稻单粒排种器研制[J]. 农业工程学报,2021,37(1):10-18.
ZANG Ying, HE Siyu, WANG Zaiman, et al. Design of pneumatic single seed metering device for coated hybrid rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(1): 10-18. (in Chinese with English abstract)
Design and experiment of the air suction wheel precision seed metering device for vegetables
ZHANG Minghua1,2,3,4, JIANG Youcong1,2, HE Siyu1,2, HUANG Zishun1,2, QIN Wei1,2, QIAN Cheng1,2, TAO Wanyan1,2, ZANG Ying1,2,3,4※
(1./,510642, China; 2.,,,510642,; 3.(-),510642; 4.,510715,)
Pneumatic precision metering device has been mostly used for single crops in recent years. However, there are many types of vegetables with large differences in seed size. It is still lacking the pneumatic precision metering device suitable for the vegetable seeds, such as flowering Chinese cabbage, radish, and hot pepper. In this study, an air-suction wheel pneumatic precision metering device was developed for the vegetables using the seed stirring strip and seed filling. The key structural parameters of the precision metering device were determined, where the diameter of the seed-suction hole was 1.0 mm, and the number of seed-suction holes was 20. The structure of the seed stirring strip was designed with a rectangular strip of length 6 mm and width 2 mm. The direction of the long axis was also tangential to the seed-suction hole. The force of the seeds was analyzed on the seed-stirring strip during the seed-filling stage. The range of the parameters was determined in the seed-stirring strip structure. A seed cleaning device was also designed with the staggered and adjustable seed cleaning distances on both sides. Among them, the force on the seeds was analyzed in the seed-cleaning stage, in order to design the structure of the seed-cleaning finger for the gradual approach of the seed-suction hole. The test objects were selected as the seeds of Sijiu No.19 flowering Chinese cabbage, short leaf No.13 radish, and Dunjiao Chuanqi hot pepper. The preference test was carried out, where the qualified, multiple and missing rates were used as test indexes, and the inclination angle and the thickness of the seed stirring strip were used as test factors. The test results showed that there was a variation in the inclination angle and the thickness of the seed stirring strip on the seed filling performance under the different seeds. The qualified rate of each structural parameter was taken as the average value. The better parameter values were determined as the inclination angle of the seed stirring strip was 30°. The thickness of the seed stirring strip was a kind of seed stirring strip with a slope, where the thickness at the thinnest and thickest points were 0.5 and 1.0 mm, respectively. A three-factor and three-level orthogonal test was carried out with the seeding rotation speed, working negative pressure, and seed cleaning distance as the test factors. The regression analysis was also performed to obtain a better combination of working parameters. In flowering Chinese cabbage seeds, the qualified rate, multiple rate, and missing rate were 99.20%, 0.67%, and 0.13%, respectively, when the working negative pressure was 0.92 kPa, the seeding rotation speed was 13.3 r/min, and the seed cleaning distance was 0.70 mm. In radish seeds, the qualified rate, multiple rate and missing rate were 97.34%, 2.13%, and 0.53%, respectively, when the working negative pressure was 4.47 kPa, the seeding rotation speed was 25.5 r/min, and the seed cleaning distance was 1.20 mm. In hot pepper seeds, the qualified rate, multiple rate and missing rate were 88.27%, 9.06%, and 2.67%, respectively, when the working negative pressure was 1.49 kPa, the seeding rotation speed was 16.9 r/min, and the seed cleaning distance was 0.69 mm. The device fully met the agronomic requirements of flowering Chinese cabbage, radish, and hot pepper. The finding can provide a strong reference to design the air-suction wheel precision metering device for vegetables.
agricultural machinery; design; experiment; air-suction metering device; precision seeding; vegetable seed
2022-11-15
2023-03-13
岭南现代农业实验室科研项目(NZ2021039);上海市科技兴农项目(沪农科创字(2021)第4-1号)。
张明华,博士,副研究员,研究方向为水稻与蔬菜种植,智能农机装备。Email:zhangminghuascau@163.com
臧英,博士,教授,研究方向为水稻生产机械关键技术与装备。Email:yingzang@scau.edu.cn
10.11975/j.issn.1002-6819.202211138
S223.2
A
1002-6819(2023)-07-0098-12
张明华,姜有聪,何思禹,等. 蔬菜气吸轮式精量排种器设计与试验[J]. 农业工程学报,2023,39(7):98-109. doi:10.11975/j.issn.1002-6819.202211138 http://www.tcsae.org
ZHANG Minghua, JIANG Youcong, HE Siyu, et al. Design and experiment of the air suction wheel precision seed metering device for vegetables[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(7): 98-109. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202211138 http://www.tcsae.org
