公路养护作业区限速控制方法研究
2023-06-11罗嵩
罗嵩

摘要 文章介绍公路养护施工控制区段构成和可变限速控制原理,围绕解决传统限速控制的方法基本完全依赖于既有交通参数关系所表现出的一定程度上的滞后性问题,阐述了基于神经网络的可变限速控制方法。BP网络计算方法能够克服传统方法的滞后性问题,但存在局部极小值困扰。RBF网络计算方法则可以同时克服两个不足。
关键词 公路养护;作业区;可变限速;控制方法;技术研究
中图分类号 U418文献标识码 A文章编号 2096-8949(2023)10-0051-03
0 引言
可变限速控制是指在施工期间,为保障施工人员和过往车辆的安全,采用可变限速控制调整车辆速度,并配置警示设施的秩序维护和安全控制技术之一。在实际施工中,机械静态限速控制不利于施工区可应用条件的最大化发挥和利用,而早期多指标模型分析控制方法的模型本身相对固化,基本完全依赖于既有交通参数关系,不能适应交通状态的非线性和时变性特点,一定程度上具有滞后性。人工神经网络分析技术兴起后,该技术引入可变限速控制分析,初期的BP神经网络分析对上述问题有所克服,但同时容易陷入局部极小值的困扰,对于新问题,RBF神经网络提供了解决方法。该文将结合工程实例,介绍施工控制区的神经网络可变限速控制方法,供同类工程参考。
1 施工控制区段与可变限速控制
1.1 施工控制区段构成
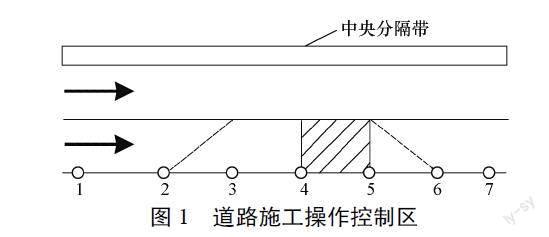
《城市道路施工作业交通组织规范》(GA/T900—2010)要求占道施工须设置控制区,主要包括警示、上游过渡、缓冲、作业、下游过渡、终止等6个区段,具体见图1所示。其中各区段的功能作用见表1所示[1]。
施工控制区限速需符合下述4方面规定:①于警示区内完成限速过程;②采取重复限速或逐级限速提示方法,按每100 m降低10 km/h的标准逐渐限速,配置限速标志,其相邻距离不宜低于200 m;③最终速度限制不应高于表2参数,最终速度限制所对应的车道预留宽度低于表中标准时,宜降低最终速度限制值;④限速组合对应的安全长度计算参考表3参数。
1.2 可变限速控制原理
可变速度控制原理是根据实时采集的交通、天气、道路等信息,构建可变限速控制分析模型,根据效率或安全等控制目标,确定区段的最优速度限制值,并以可变信息标志给予发布,以控制作业区的交通状态。
较早的可变限速的模型化控制,依赖于既有交通参数关系,不能适应交通状态的非线性和时变性特点,一定程度上具有滞后性。BP网络分析方法兴起后,借助神经网络分析,该技术的不足逐渐得到克服。
2 基于BP网络分析的可变限速方法
2.1 BP神经网络
反向传播(BP)神经网络是应用广泛的神经网络,具有很强的非线性映射性能,可以大量学习和储存非线性映射关系,输入输出数据流,实现非线性复杂映射[2]。
2.2 基于BP网络计算的可变限速控制
基于BP网络计算的非线性系统函数建模总体分三步实现,即构建BP神经网络、网络信息训练和网络预测。
由系统输入及输出运算,确定网络层数,样本数据分为训练数据与测试数据,其中训练数据用于训练神经网络,利用训练后的网络的预测函数输出预测数据,并对预测成果进行分析。
兼顾施工区限速控制、施工效率与安全需求,应用BP可变限速控制器实现施工区交通流控制。选择上游区段密度、车速、大车率、交通量等4个因素的代表参数输入神经网络开展控制计算。神经网络输出是可变限速序列,通常包含3个可变限速值。
首先确定样本,样本分为训练学习和测试两种样本,前者用于网络学习训练,后者用于网络精度测试,对收集的样本做归一化处理,通过仿真软件Vissim,获得神经网络的训练学习样本。在模拟中,通过不断改变大车率和交通量,收集神经网络所需的输入值,输入后不断尝试限速组合运算,找到特定输入条件下的最佳限速序列。
前述过程分别对应4个输入和3个输出,其中交通量取1 000~3 500辆/h,按250或500辆/h选择1次,共选择7个交通量输入。大车率范围10%~50%,选择10%。总共输入了5种大车率。结合约束条件和相邻限速标志之间的限速值范围,经过排列组合,所述交通量与大车率条件下,存在128种限速序列组合。采用兼顾效率和安全的综合评估指标,确定最佳限速序列。
3 基于RBF网络分析的可变限速控制方法
3.1 RBF神经网络
RBF神经网络也称径向基函数神经网络,与BP神经网络一样,也是一种前馈型网络,能够逼近任何非线性函数。
在RBF神经网络训练中,高斯函数常作为隐含单元的径基函数,其激活函数如下[3]:
式中,σ——高斯函数方差;ci——高斯函数的中心;——欧式范数。则RBF网络的输出:
式中,P——样本总数;xp——输入的第p个样本;ci——隐含层的节点中心;h——隐含层结点的总数;wij——隐含层层至输出层的权值;yj——对应输入样本的第j个输出。如果d为期望样本的输出,那么基函数方差如下:
在RBF网络中,基函数从输入层至隐含层的输出呈现非线性映射关系,而输出却呈现线性,则RBF网络就实现了从非线性输入到线性输出目的。RBF网络可以映射任何非线性的复杂关系,其训练规则简单,鲁棒性强,非线性映射、记忆能力和自训练能力,从根本上克服BP网络存在的局部极小问题。
3.2 基于RBF网络的可变限速控制
RBF神经网络学习方法的分类与决定网络结构特点的参数构成有关。RBF的网络参数由三部分构成:径向基函数的中心c、方差σ和隐含层到输出层的权值w。
隱含层基函数中心c的选择方法有正交最小二乘法、自组织选择法和随机选择法。该研究采用K-means的学习方法,即以自组织选择方法训练RBF神经网络。其中学习方法由两个过程构成:第一个过程是计算隐含层基函数的中心和方差;第二个过程是找到从隐含层至输出层的权重。学习训练过程如下:
第一步:由K-means聚类方法寻找基函数的中心c。
(1)初始化网络:随机选择n个样本作为基函数中心ci(i=1,2,…,h)。
(2)按相邻最近原则分组样本:根据聚类中心ci至xp之间的欧式距离,将xp分组至学习样本的p(p=1,
2,…,P)聚类集合中。
(3)聚类中心重新调整:统计p中学习样本的均值,获得新聚类中心。新旧聚类中心进行对比,如果两者相等,那么所得聚类中心c即为基函数中心。如果二者不等,则向上一步骤返回,进行基函数中心的下一循环计算。
第二步:方差计算。以高斯函数作为神经网络的基函数,其方差计算如下:
式中,cmax——被选择的所有聚类中心间的长度最大值。
第三步:以最小二乘方法,计算隐含层至输出神经元间的w权值:
借助Matlab系统构建RBF网络。RBF网络中,网络性能受径向基函数的Spread扩展系数的影响较大。选择合理的Spread系数很重要。通过不断地运行尝试,最终可以得到优化的Spread系数为11。
4 实例分析
为验证RBF可变限速控制的功效,该研究将其应用于高速公路施工区域的实例中。某路面养护工程的施工区段某双向六车道,位于某市的三环路以南,螺洲桥和魁浦桥之间,施工区域总长度约2.00 km。施工区为封闭部分单幅车道施工区,封闭外侧的一条车道。
基于工区勘测信息,该研究应用Vissim模拟系统进行仿真,建立模拟施工区段,输入基本交通数据,模拟运行时长4 200 s,初600 s为预热时间,分别进行无变速控制、RBF网络控制和优化的BP网络控制的状态仿真。不同控制下的密度和速度变化曲线表明,无限速控制时,施工区域保持比较大的过流密度,速度处在比较低水平。但在RBF和优化的BP网络算法控制下,施工区域的过流速度都不同程度地获得了提高,交通流密度有所降低。
限速警示标志所在区间的限速变化曲线见图2~3所示。RBF网络控制在小范围内波动,导致频繁改变限速值,相比之下,优化的BP网络控制则表现稳定,显示优化的BP网络控制方法优于RBF网络控制方法。
除了比较交通流参数之外,安全和效率指标见表4所示。数据显示,相比无限速控制,早期多指标模型分析方法和神经网络分析方法均可以不同程度地提高作业区的通行效率与安全。其中经过遗传运算优化以后的BP網络分析的效果最好,降低延误69.30%,降低冲突比例59.00%,使交通量提升7.90%。安全和效率指标的比较结果见表4所示。
从表4可以发现,与无限速控制相比,可变限速方法和神经网络计算方法都不同程度地增强了施工区域的安全性和过行效率。其中优化的BP网络算法的功效最好,冲突率降低了59.00%,延误降低了69.30%,提高交通量7.90%。BF网络算法次之,早期多指标模型分析方法再次之。仿真结果显示,神经网络计算方法能够获得较好的限速控制值,进而有效提高了作业区域的通行效率与安全性。
5 结语
该文结合分析工程实例,基于对公路养护作业区限速控制方法的研究,介绍了公路养护施工控制区段构成、可变限速控制原理,揭示了早期变限速控制分析计算存在的技术不足,阐述了基于神经网络分析的可变限速控制方法。研究表明,基于BP网络计算的可变限速分析控制方法克服了之前的可变限速控制分析存在的不足,对于BP的极小值困扰问题提供了解决方法,但也再度面临了容易陷入局部极小值的困扰。实例分析结果也显示,优化的BP网络算法的功效最好,BF网络算法次之,早期多指标模型分析方法再次之。神经网络计算方法能够获得较好的限速控制值,进而有效地提高了作业区域的通行效率与安全性。
参考文献
[1]刘春春. 基于仿真技术的高速公路施工区交通安全措施研究[D]. 成都:西南交通大学, 2012.
[2]朱永光. 高速公路施工区交通组织与作业段长度优化研究[D]. 西安:长安大学, 2010.
[3]程爽. 基于交通特性的高速公路改扩建工程合理分段方法研究[D]. 武汉:武汉理工大学, 2013
