基于发现概率模型的吊放声纳搜潜效能研究*
2023-06-05顾云涛史旭峰
顾云涛 李 谦 史旭峰
(1.海军装备部西安代表局 西安 710068)(2.中国船舶集团有限公司第七〇五研究所 西安 710077)
1 引言
吊放声纳是指通过吊放电缆将声纳基阵垂入水中进行目标探测的声纳,主要装备在反潜直升机上。由于吊放声纳具有搜潜效率高、探测精度高、体积小、重量轻、操作简单、可重复使用等特点,普遍应用于反潜直升机的作战当中[1~3]。在实际的搜潜任务当中,影响搜潜效能的因素较多,如任务决心、态势信息、水文参数、搜潜方法、声纳工作参数等[4~5]。通过分析搜潜过程中的相关参数与目标发现概率之间的关系,可以有效地提升吊放声纳搜潜效能,对战术行为以及后续的指挥策略提供了重要的理论依据和模型支撑。
应召搜潜是反潜战中重要的作战样式,是指在通过其它兵力获得某海域概略位置内的敌方潜艇信息,反潜直升机快速飞抵目标出现过的区域,通过多种搜索手段进行搜索检测,进而发现潜艇目标,实现对目标的二次搜索,为后续的反潜打击作战提供敌方潜艇准确的态势信息[6~7]。
针对目标航速已知,航向未知的态势信息,通常采用扩展螺旋线的方法实现应召搜潜,文献[8~12]中分别提出了利用吊放声纳的扩展螺旋线搜索方法,通过对扩展螺旋线方法中的搜潜路径以及声纳探测范围进行了优化和改进,利用蒙特卡洛的方法对发现概率进行了仿真验证,结果表明此类方法可以提高整个搜潜过程中的搜潜效能。
然而上述文献仅通过蒙特卡洛方法对不同情况下的搜潜效能进行了仿真计算,未能给出一种有效地计算某一潜艇分布规律下的吊放声纳对目标的发现概率计算方法。为此,本文结合反潜直升机中的搜潜过程,采用吊放声纳实现应召搜潜作为任务场景,对应召搜潜中的搜潜概率模型进行了深入研究,并对影响对敌方目标发现概率的参数进行了仿真分析,并给出了相关结论,为后续的反潜作战辅助决策提供了理论依据和算法支撑。
2 吊放声纳应召搜潜过程
反潜直升机使用吊放声纳进行搜潜作战的基本过程主要包括起飞准备、出航、对潜搜索、返航着陆(舰)等过程。
对潜搜索:反潜直升机到达搜索海域之后、按照预定的搜索航线飞行,在第一个探测点下降到悬停高度悬停,通过电缆从机身内下放换能器。根据海区深度和水声环境,将换能器下放到合适的深度,开机搜索目标。
图1给出了使用吊放声纳执行搜潜任务的示意图。反潜直升机从悬停于当前探测点开始,至机动到下一个探测点并完成悬停所需时间,定义为搜索周期。搜索周期出要取决于三部分:即反潜直升机下放、收起吊放声纳换能器所必须花费的时间;换能器在水中工作的时间(真正有效的探测时间);反潜直升机在两个探测点之间的飞行时间。因此,吊放声纳搜索周期的计算公式可以表示为
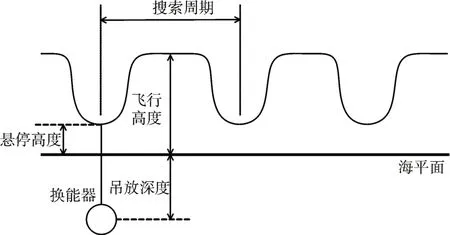
图1 吊放声纳搜潜过程示意图
式中:ttc为吊放声纳在水中的听测时间;tdown、tup分别为下放、升起换能器的时间;tf为反潜直升机的飞行时间。
吊放声纳搜索周期的长短直接影响了搜索效率。但在执行一次搜潜任务过程中,当给出搜潜兵力的武器装备参数时,ttc、tdown、tup一般为固定值。因此,搜索周期只与相邻探测点之间的飞行时间tf有关。
由上面的分析可以看出,整个应召搜潜过程的时间可以表示为
其中,T0表示接收到应召搜潜任务后做好飞行准备,并飞行至首个探测点进行首次听测所需时间;TR表示直升机执行完搜潜任务之后的返航着陆(舰)时间;n表示一次搜潜任务中使用吊放声纳进行听测的次数。
3 水下机动目标散布规律建模
研究水下机动目标的散布规律模型,可以针对于在机动时间内的潜艇目标的位置分布特点,以及高概率出现区域,制定相对应的搜潜航路、搜潜策略,对优化搜潜指挥决策、分配搜潜兵力武器和提高搜潜效率有着重要意义。
水下机动目标位置散布由目标的初始位置散布和目标机动散布引起。在给定某一确定的机动时间的前提下,机动散布又与目标的航速、航向散布有关。根据其他兵力对于目标的初始定位散布规律以及目标航速航向的获取以及分布规律情况,初步分析目标初始位置散布、目标航速散布和目标航向散布模型。图2给出了水下机动目标散布模型构成的结构图,从图2中可以看出,对于不同的目标初始位置分布模型、目标航向散布模型和目标航速散布模型,可以排列组合出种散布方式。
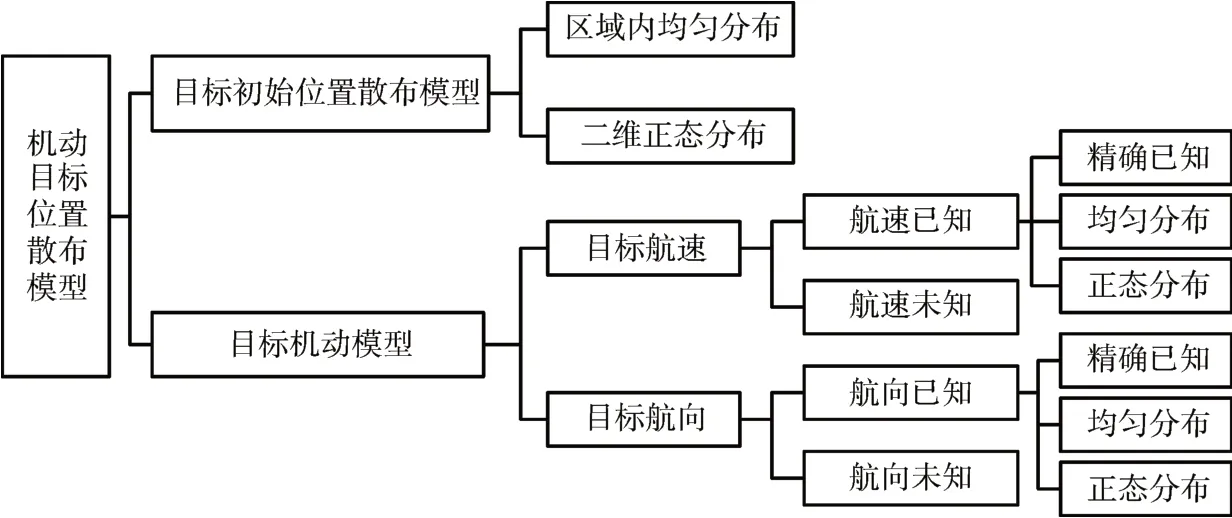
图2 水下机动目标散布模型构成的结构框图
在仿真的过程中,采取的是由目标初始散布规律为二维正态分布、目标航速精确已知和目标航向未知的机动目标散布规律模型。
由于来自先验信息的目标潜艇位置信息具有较大的不确定性,根据中心极限定理可知,敌目标潜艇的初始位置服从二维N(0,σ02)正态分布,散布中心为坐标原点,即数学期望值为0,敌目标潜艇初始位置点(x0,y0)的联合概率密度函数可以表示为
其中,x0,y0相互独立且同分布,本文中采取如下假设σ0x=σ0y=σ0,均服从N(0,σ02)分布,那么目标初始位置散布的概率密度函数可以表示为
令σ0=1km,可以给出目标初始二维正态分布结果,如图3所示。
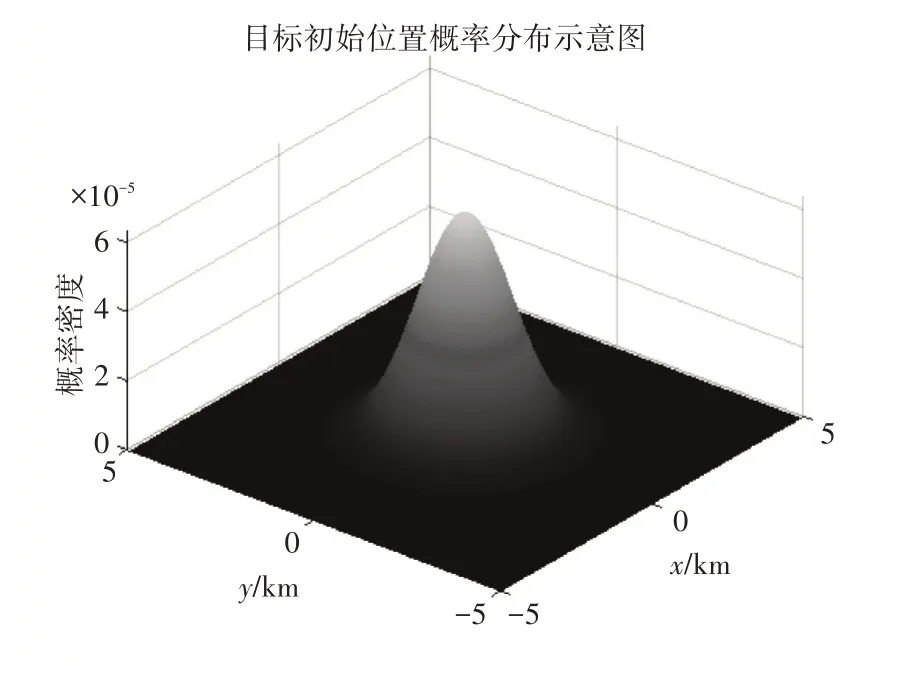
图3 目标初始位置分布图
假设目标的航速已知,航向在[0,2π]区间上服从均匀分布,由于潜艇速度vQ已知,当反潜直升机在飞行了T0时刻后开始搜索时,潜艇可能的分布位置为半径为vQT0,方向为[0,2π]区间上任意角度的圆周上。此时,潜艇的位置散布规律为瑞利均匀联合分布,其概率密度函数可以表示如下:
图4给出了目标机动距离vQT=9km 时,敌方潜艇位置的概率分布情况。可以看出,此时目标位于图中环形峰顶处的概率最大,这与理论常识相符合。
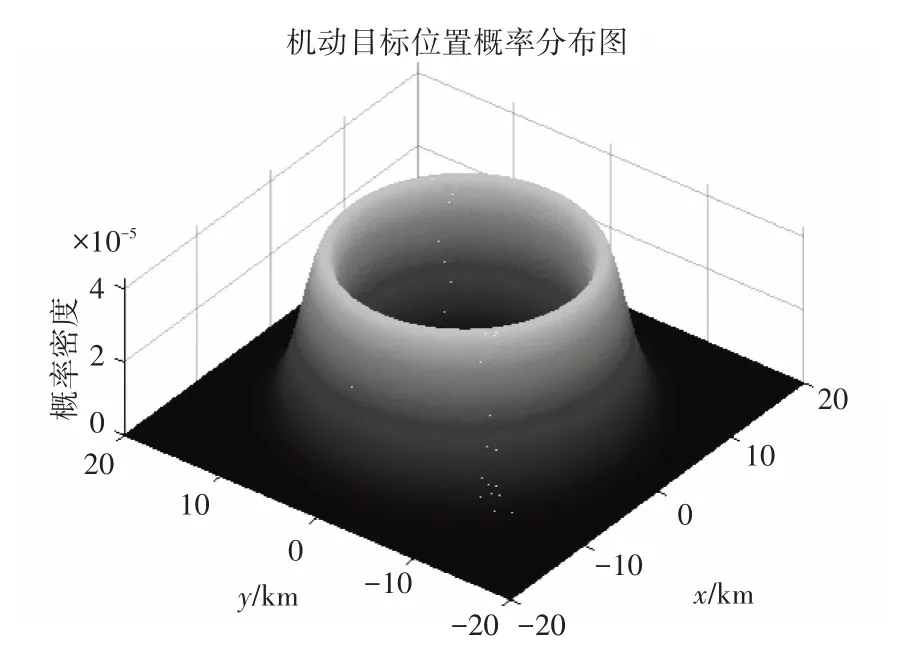
图4 机动目标位置概率分布图
4 应召搜潜中的搜潜方法
应召搜潜是指航空搜潜兵力在机场、载舰或指定空域待命,在获得敌方潜艇的活动情况后,按照上级的命令出动,飞往发现敌方潜艇的海域,搜索敌潜艇的战斗行动。应召搜潜属于二次搜索类型,主要由其他的反潜兵力预先得知潜艇位置,再利用反潜航空兵进行搜潜。
假设潜艇运动速度已知,航向在[0,2π]区间上服从均匀分布,发现目标的初始位置与反潜直升机相距一定距离,则反潜直升机以最大速度飞往初始发现区域,通常采用扩展螺旋线搜索的方法实现应召搜索。采用扩展螺旋线搜索的方法可以保证在搜索过程中,反潜直升机飞行的任一时刻都能与潜艇保持在以潜艇初始位置点为圆心,以潜艇在延迟时间内的潜艇机动距离为半径的圆周上。
4.1 扩展螺旋线搜索
在使用吊放声纳进行应召搜潜的过程中,通常采用等距扩展螺旋线的方式进行搜索,也就是保持相邻两个悬停点之间的直线距离相等,相邻探测点之间的距离可以表示为
其中,d为相邻两个探测点之间的距离,R为声纳的探测半径,η为间距系数,为了以较高的概率发现敌方潜艇,通常取值为1.0~2.0。由上述搜潜路径上的悬停点构成对数螺旋线,其极坐标轨迹方程为
其中,r0为潜艇初始位置与反潜直升机初始位置连线的距离,k为螺旋系数,主要取决于潜艇目标运动速度与我方反潜直升机速度的大小,具体表达式如下:
4.2 搜潜方法中的探测点解算模型
等距扩展螺旋线搜索需要保证相邻两个探测点之间的距离为一固定的常数d,根据三角形的相对位置关系,利用余弦定理可以得到第i 个探测点的距离Ri和θi的表达式为
其中,Ti表示第i 次使用吊放声纳进行探测的时间,可以表示为
特别地,规定R1=vqT0,θ1=0,表示第一个探测点位于应召位置的正东方向,距离为在首次听测时间内敌方潜艇目标运动的距离。
4.3 发现概率模型
在执行一次反潜直升机应召搜索任务时,使用了吊放声纳进行了n 次探测,当采用一次发现概率模型时,则该次搜潜任务下最终的发现概率可以表示为
其中,Pi为第i次使用吊放声纳的探测概率。
下面给出单次使用吊放声纳进行目标探测的发现概率模型。假设吊放声纳探测一次的区域为以探测点为圆心,有效作用距离为半径的圆形区域,因此,探测概率为目标位置分布函数在该区域内的积分。
从上面的推导过程可以知道,第i 次进行探测时的探测点坐标可由式(9)给出。第i 次使用吊放声纳进行探测时的探测范围是以第i次探测点为圆心,以声纳探测距离为半径的圆形区域,其中积分区域的积分边界可以由下面的方法给出。
考虑更一般的情况,如图5所示,在直角坐标系下,可知圆心在(xc,yc),半径为R的圆的方程可以表示为
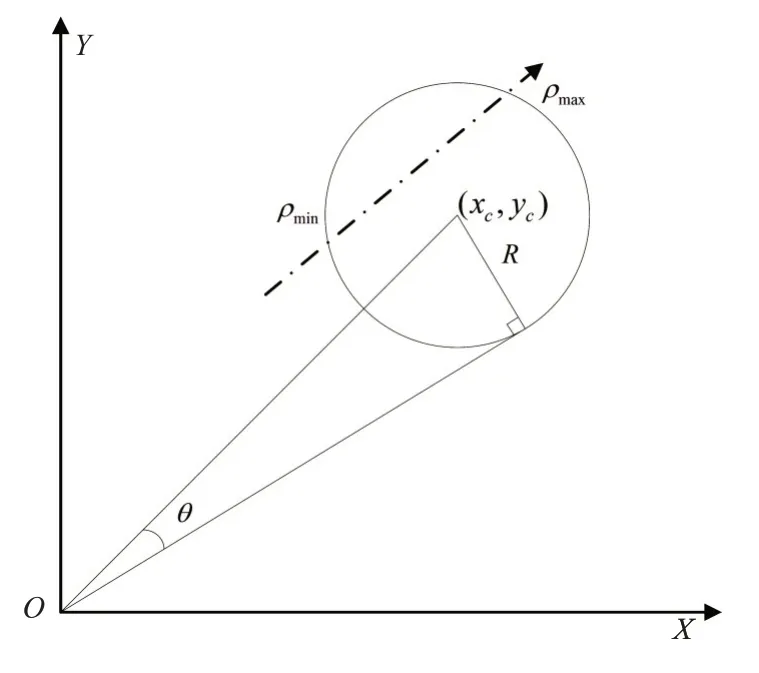
图5 吊放声纳圆形探测区域示意图
将式(12)其转化为极坐标下的方程:
关于ρ的一元二次方程的解可以表示为
可以写出被积区域的积分上下限为
其中,f(x,y)为目标分布的概率密度函数,D 为某一吊放声纳可以探测的区域。
5 仿真实验
5.1 仿真参数
在仿真中,假设敌潜艇的初始位置距本舰100km,潜艇的初始位置分布规律服从二维正态分布,定位误差为σ0=680m。采用应召搜潜中的扩展螺旋线搜索法对敌方潜艇目标进行搜索。敌潜艇平均运动速度为10kn,初始航向角在[0,2π]之间均匀分布;反潜直升机的巡航速度为200km/h,吊放声纳水下分机下放深度为150m,下放速度为3m/s,提升速度为3m/s,探测时间为6min,首次听测时间T0为30min;吊放声纳的作用距离为4km。
5.2 仿真结果及分析
本节通过计算机仿真模拟,依次分析了探测次数、吊放声纳间隔系数和首次听测时间对于目标发现概率的影响。
图6中给出了当目标运动速度为10kn时,我方利用吊放声纳进行应召搜潜的扩展螺旋线搜索的示意图。图中的红色圆形表示在该圆心对应的探测点的声纳探测范围。图中的红色折线表示的是该次应召搜潜过程中,反潜直升机的搜潜路线图。图中的黑色圆形虚线表示该时刻内目标可能出现的位置所构成的同心圆的集合。由于采用扩展螺旋搜索的方式进行搜索,每次探测点均位于以应召点为圆心,以延迟时间内的潜艇运动距离为半径的同心圆周上。
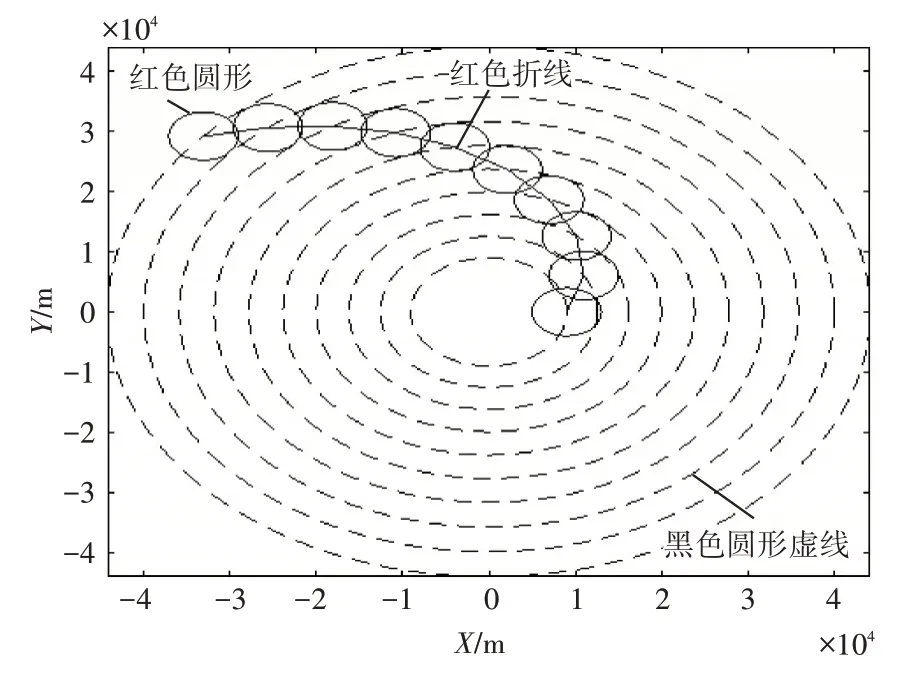
图6 扩展螺旋线搜索路线示意图
其余仿真条件不变,目标的运动速度分别为10、15、20节时,图7给出了目标潜艇在不同运动速度下的探测概率与吊放声纳的探测次数的变化曲线。

图7 目标运动速度与发现概率的变化曲线
从图7中可以看出,在某一固定的潜艇运动速度下,当探测次数较少时,任务搜索概率随着探测次数的增加有明显提高;然而当探测次数较大时,增加探测次数对搜索概率的影响并不大,这是因为目标散布面积增加,降低了后续吊放声纳单次探测的发现概率。特别地,对于高速机动目标,当探测次数大于5 次时,探测概率基本趋于稳定,即后续的探测对目标的发现概率的影响很小,可以忽略不计。
当目标运动速度从小变大时,我方的搜索概率也随之降低。值得一提的是,由于采用的是单机螺旋搜索的方式,导致整体的搜索概率最高仅有40%左右,整体的发现概率并不高;而对于高速机动目标来说,扩展螺旋搜索方法的发现概率仅为21%,发现概率较低,在实际的搜潜任务中,可能难以满足任务要求。因此在实际中搜潜的任务中,常常采用双机/多机螺旋搜索的方式进行搜索,以提升搜索效率。
当其余仿真参数不变时,图8中分别给出了目标不同速度条件下,目标的发现概率与声纳吊放间隔系数之间的变化曲线。
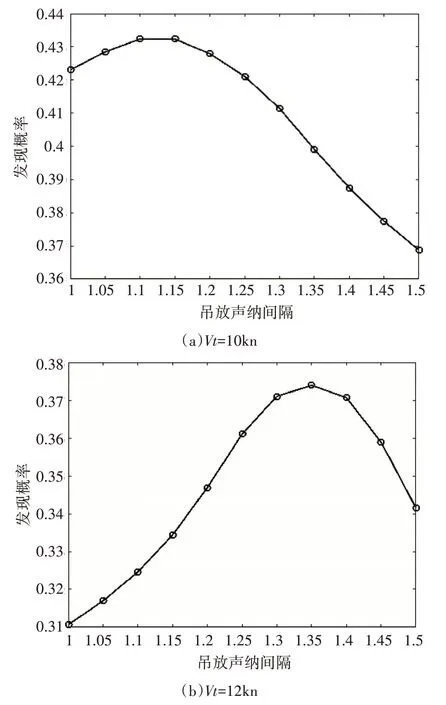
图8 目标发现概率与吊放声纳间隔系数的变化曲线
从图8中可以看出随着间隔系数的增加,对目标的发现概率先增加后减少,目标运动速度的不同决定着拐点的不同。在仿真的参数条件下,当目标运动速度为12kn 时,吊放声纳的间隔取为1.35 倍的声纳探测半径时,对目标的发现概率最大。当目标运动速度为10kn 时,吊放声纳的间隔取为1.15倍的声纳探测半径时,对目标的发现概率最大。
图9给出了其余仿真参数条件不变时,目标发现概率与首次听测时间之间的变化曲线。

图9 目标发现概率与首次听测时间的变化曲线
从图9中可以看出,随着首次听测时间的增加,目标的发现概率也随之降低。当延迟时间从10min 增加为30min 时,对目标发现概率从78%下降到43%,对敌方潜艇目标的发现概率大幅度降低。这是因为随着首次听测时间的增加,目标在该时间段内的活动范围也随之增加,是的我方反潜直升机需要搜索的范围变大,不利于发现目标,这与已有的理论是相吻合的。为了提高对于敌方潜艇目标的发现概率,应尽量缩短反应时间,尽可能提高兵力准备速度,尽可能地减小首次听测所需要的时间,可以大大提升对目标的发现概率。
6 结语
本文通过建立反潜直升机采用吊放声纳进行应召搜索时的搜索模型,结合了机动目标位置散布规律、单次探测的发现概率计算方法,仿真分析了采用扩展螺旋搜索方法时的探测次数、目标航速、间隔系数和首次听测时间对于敌方潜艇目标发现概率的影响。本文中给出的模型及对敌潜艇目标的发现概率的计算公式正确,得出的结论可信,可用于为指挥员提供反潜作战指挥搜潜方案的辅助决策。
然而,本文所提出的搜潜效能评估模型仅考虑了单机搜索的情形,后续将结合现代编队作战的特点,在搜潜模型中引入编队协同搜潜的概念,对搜潜方案中的兵力路径规划以及协同搜潜效能评估开展更为深入的研究。
