基于机载LiDAR点云数据的历史文化街区重建方法研究
2023-05-30薛巍杨志伟
薛巍 杨志伟

摘 要:为了提高历史街区重建过程中建筑物轮廓与实际建筑物激光脚点的吻合精度,提出了一种基于机载LiDAR点云数据的历史文化街区重建方法。首先,对机载LiDAR点云数据作预处理,去除点云数据中的噪声。其次,利用区域生长算法对激光脚点作分割,完成建筑物点云数据的获取。之后,采用Alpha Shape算法提取建筑物特征信息,得到轮廓线,再通过管子算法将轮廓线规则化。针对多边形轮廓线,采用分类强制正交法对其作规则化。最后,通过平面拟合、直线拟合等方法,对历史文化街区进行三维重建。结果表明,所提出的重建方法在提取建筑物轮廓时,激光脚点吻合更精确,并且重建耗时为25 min,优于文献所提的2种方法。基于机载LiDAR点云数据的历史文化街区重建方法,可以在一定程度上提高历史文化街區的重建质量,并为其他历史文化街区的保护与更新提供借鉴。
关键词:光电子学与激光技术;机载LiDAR;点云数据;历史文化街区;区域生长算法;轮廓线
中图分类号:TP751
文献标识码:A
DOI: 10.7535/hbgykj.2023yx02005
Reconstruction method of historical and cultural blocks based on airborne LiDAR point cloud data
XUE Wei1,YANG Zhiwei2
(1.CCTEG Chongqing Engineering (Group) Company Limited, Chongqing 400016, China;
2.School of Architecture and Design, Chongqing College of Humanities, Science & Technology, Chongqing 401524, China)
Abstract:In order to improve the matching accuracy of building outlines and actual building laser foot points in the process of historical block reconstruction, a reconstruction method of historical and cultural blocks based on airborne LiDAR point cloud data was proposed. Firstly, the airborne LiDAR point cloud data were preprocessed to remove the noise in the point cloud data. Secondly, the region growing algorithm was used to segment the laser foot points to complete the acquisition of building point cloud data. Afterwards, the Alpha Shape algorithm was used to extract the feature information of the building, and the contour line was obtained, and then the contour line was regularized by the pipe algorithm. Aiming at polygonal contour lines, the method of classifying and forcing orthogonality was used to regularize them. Finally, through plane fitting, straight line fitting and other methods, the historical and cultural blocks were reconstructed in three dimensions. The results show that the proposed reconstruction method is more accurate in extracting building outlines than laser foot points. And the reconstruction time is 25 minutes, which is better than the two methods mentioned in the literature. The reconstruction method of historical and cultural blocks based on airborne LiDAR point cloud data can improve the reconstruction quality of historical and cultural blocks to a certain extent, and provides reference for the protection and renewal of other historical and cultural blocks.
Keywords:optoelectronics and laser technology;airborne LiDAR; point cloud data; historical and cultural blocks; region growing algorithm; outline
历史文化街区作为城市建设发展过程中具有历史价值的区域,其存在见证了城市街巷的演变发展历程和景观风貌的变迁,是城市景观体现中非常重要的一部分[1-3]。目前,历史文化街区面临被拆除和遗弃,一方面是因为这些历史文化街区通常位于市中心,另一方面是历史文化街区的价值被人们所忽视[4-5]。然而,历史文化街区对于城市的发展和规划具有十分重大的意义,远远超过自身的经济价值,逐渐受到相关学者的重视,重建历史文化街区具有重要的意义。
机械激光雷达(机载LiDAR)技术能够快速精准地获取地面物体的位置和高度信息,是一种获取地球空间信息的高新技术手段[6]。该技术通过数据滤波处理获取地面和非地面的点云数据,并将其分离,从而获取实际的建筑物等信息,具有探测灵敏度高、数据精度高等优点。然而,在对机载LiDAR点云数据的处理中,由于所用算法不同,导致处理效果不同。传统算法[7-8]在对点云数据的处理过程中,提取建筑物轮廓的精确性还有待提高。王竞雪等[7]融合了区域生长及主成分分析方法,获取了机载LiDAR建筑物点云,利用构建的离散点云数据三角网,提取建筑物边缘特征点,在此基础上进行单体化分割,实现了建筑物的点云提取。该方法具有较好的适应性,但点云数据的提取效率有待完善。赵传等[8]提出了基于深度残差网络的机载LiDAR点云分类方法。根据提取的归一化高程点云低层次特征,生成点云特征图,再将点云特征图输入到深度残差网络,进行点云提取与分类。该方法可以有效区分不同地物,但点云提取精度有待进一步完善。
本文提出一种基于机载LiDAR点云数据的历史文化街区重建方法,通过对比实验,证实该方法具有更高的精确性。
1 历史文化街区重建方法
1.1 机载LiDAR数据预处理
利用机载LiDAR获取历史文化街区的点云数据,得到的原始点云数据中包含大量噪声,需要去除这些噪声,便于后续建筑物边缘提取[9-10]。所以,首先需要对通过机载LiDAR获取的历史文化街区原始数据进行处理。数据预处理过程如下:将数据的噪声作分类处理,将其分为高空孤立点、局部点和空洞点,通过后续处理中提到的平面拟合去除高空孤立点,通过插值对空洞点作赋值处理。然后,对经过预处理的机载LiDAR数据作进一步处理。
1.2 机载LiDAR点云数据获取
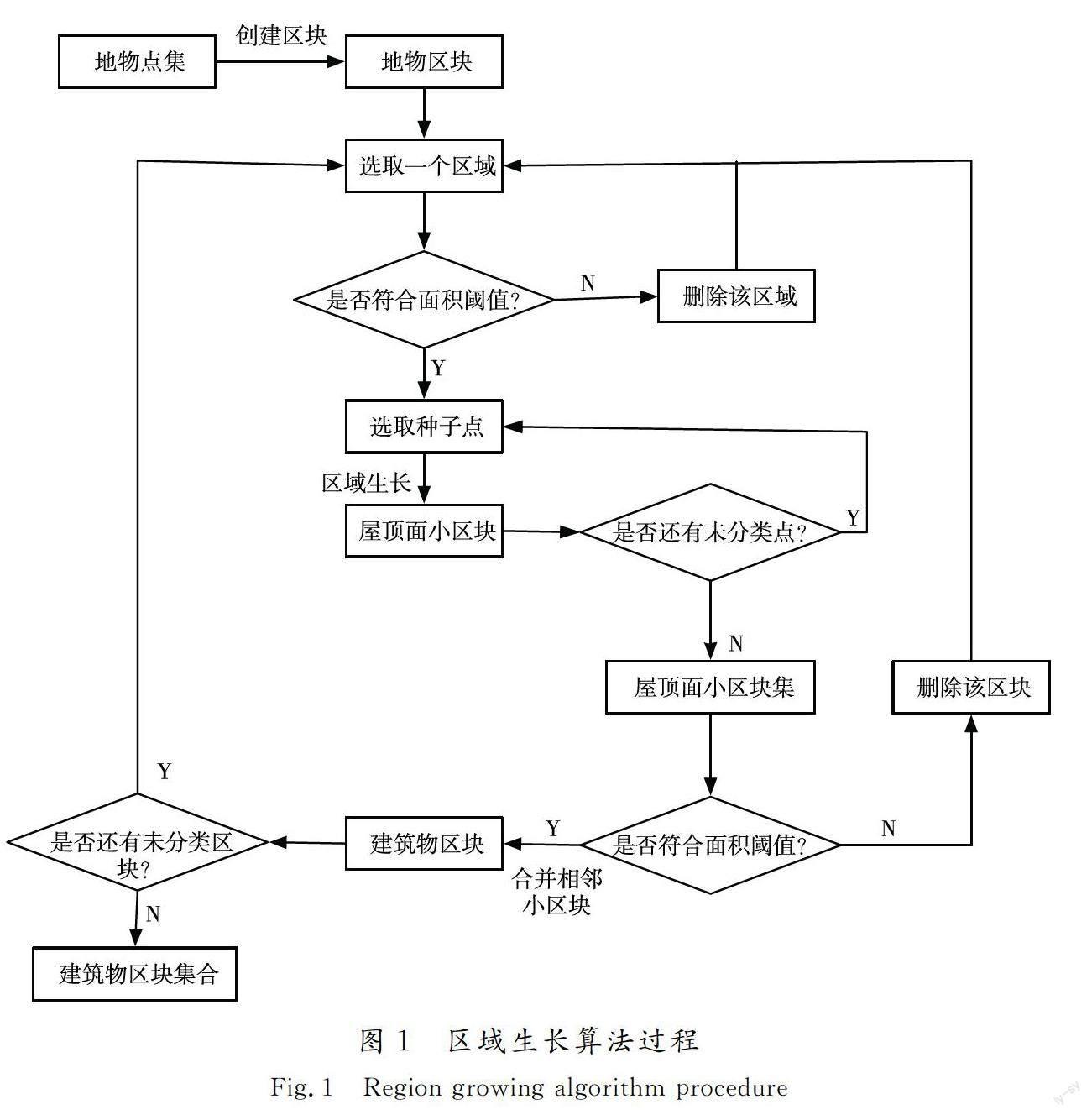
采用区域生长算法对历史文化街区的建筑物激光脚点进行分割,区域生长算法可以用来分割历史文化街区比较复杂的建筑物图像。区域生长算法过程如图1所示。
针对相邻的地面物体角点,创建一个区域集合Q={A1,A2,…,AN}。任意选取一个非地面脚点作为初始种子点,开始创建区域。通过递归,将种子点的八邻域中的非地面脚点相连接,形成区域,直至没有可以继续连接的点,创建区域结束[5,11-12];重复上述过程,直至每个非地面脚点均被划分到一个区域Ai中。然后,将每个区域Ai分成2部分Ii和Bi。其中,Ii表示区域内部脚点,Bi表示区域的边缘脚点。如果一个脚点的八邻域中至少有一个脚点属于地面点,此激光脚点被定义为边缘点,反之,则为内部点[13]。如果小区域Ai内部的脚点数为0,则从集合Q中去除Ai。之后,对集合区域中的每个小区域作如下循环。
1)给定一个内部点dk(x0,y0,z0),以此内部点为原点建立直角坐标系,以dk和它的8个相邻点通过最小二乘法得到拟合平面。假设平面方程如式(1)所示:
式中,(a,b,c)通过求解偏差σ平方和的极小值σk得到,极小值的求解如式(2)所示:
式中:K表示dk及其相邻点构成的集合;hk表示激光点dk的高程测量值;zk表示拟合平面的高程测量值[14-15]。通过上述公式可以得到由小区域Ai中所有内部激光脚点的最小值组成的集合θi={σ1i,σ2i,…,σNi}。
2)如果θi≠?,則设定Dj≠?,j的初始值为1。
3)选取最小值的点作为种子点开展区域生长任务,将该点加入集合Dj。
4)采用平面拟合方法对邻近的种子点进行检测,确定它们是否为一个集合,并在邻近的位置做标识。将属于同类的激光脚点通过最小二乘法构建平面[16-18]。若邻近的点距该平面的高度差低于临界值,则将该邻近的邻近点数添加到Dj集合中,直至没有激光脚点可添加至结合Dj中,此过程结束。
5)从集合Ai中去除集合Dj,与此同时,在θ中去除σ,返回步骤2)。
6)循环上述步骤,直至Ai=?。
通过上述循环过程,得到小区域Dj的集合D,D={D1,D2,…,Dj,…,DM},Dj={d1j,d2j,…,dNj},其中,dkj是小区块j中的第k个激光脚点[19-20]。如果Dj不完全包含在其他区域,则从D中去除Dj。之后,将D中相连的区域合并得到新集合DM。将具有不同高度的历史建筑相邻屋顶面合并为一个大的区块,如果DMj小于预设的最小建筑物面积阈值,则将DMj从DM中去除,最后,DM中剩下的区块都是历史文化街区中的建筑物区块。
1.3 历史文化街区建筑轮廓线规则化处理
首先,采用Alpha Shape算法提取建筑物的轮廓线[21-22],再将其简化,最后将其几何规则化。利用Alpha Shape算法提取历史文化街区建筑物轮廓的具体步骤如下。
假设建筑物的形状为多边形,该多边形是有限点集X的轮廓,用一个半径为β的圆沿着多边形的边缘滚动,如果β够小,则此圆的滚动痕迹为X的边界,并且每一个点都是边界;如果β够大,则是轮廓线X的凸包。
通过对β的控制,调节轮廓线的平滑程度。取X内的2点V1,V2,以β为半径画圆,如果除了V1,V2外,没有其他点落在该圆中,则判定V1,V2为边界点[23-24],V1,V2之间的连线为边界线段,判决条件如图2所示。
如图2所示,已知V1,V2的坐标分别为(x1,y1),(x2,y2),求取圆心V3的坐标。由于通过前述算法提取得到的轮廓线非常粗糙,故对其采用管子算法作进一步简化处理,使轮廓线规则化。
具体处理过程:利用直径为ω的管子模拟历史文化街区建筑物轮廓线的外边缘,如果建筑物轮廓线上所有的点均在管子内,这些点距离变化小于ω,则舍弃这些点中的中间点,轮廓线视为无变化[25];反之,如果这些点的距离变化大于ω,超出管子的直径范围时,则建筑物轮廓线的拐点被保留下来,通过矩形外接圆实现轮廓线的规则化。针对多边形轮廓线,采用分类强制正交法对其作规则化处理,处理流程如图3所示。
数据规则化处理可以改善点云数据的面元属性,便于后续历史街区的三维重建。
1.4 历史文化街区三维重建
在提取机载LiDAR数据中历史文化街区特征信息后,得到历史文化街区的建筑物轮廓,对历史文化街区开展三维重建工作。平面方程p=ax+by+c采用最小二乘法处理,点到平面距离的计算如式(3)所示:
将式(3)用泰勒公式作进一步处理,通过迭代计算,得到人字型屋顶平面的拟合平面。
对于其他形状的屋顶建筑物,以屋顶面上任一点为原点,以建筑物的主方向和垂直方向分别作为横坐标轴和纵坐标轴,建立坐标系,通过直线拟合,重建其他形状的屋顶建筑物[26]。建筑物屋顶的激光脚点在建立的坐标系o-x′y′z′中的坐标由式(4)得到:
式中,φ代表坐标系能与新建坐标系重合的顺时针旋转角度。通过直线拟合,重建四坡顶等其他形状的建筑物。综上所述,通过平面拟合和直线拟合,完成建筑物的三维重建。
至此,完成基于机载LiDAR点云数据的历史文化街区重建方法的设计。
2 实验与分析
以某历史文化街区为例,采用提出的重建方法,验证该重建方法是否可以有效得到历史文化街区的点云数据。
2.1 历史文化街区概况
某历史文化街区概况图如图4所示。
针对图4所示的某历史文化街区概况图,采用提出的重建方法重建该历史文化街区。
2.2 实验过程
采用提出的基于机载LiDAR点云数据的历史文化街区重建方法对该历史文化街区重建,选取某一区块的机载LiDAR点云数据为实验目标,并将提取结果与文献[7]方法(结合区域生长及主成分分析的机载LiDAR建筑物点云提取)、文献[8]方法(基于深度残差网络的机载LiDAR点云分类)2种传统重建方法作对比。
2.3 建筑物轮廓提取视觉对比
本文提出的基于机载LiDAR点云数据的历史文化街区重建方法与文献[7]方法、文献[8]方法的对比结果如图5所示。
由图5可知,所提方法提取的建筑物轮廓与实际建筑物激光脚点吻合,能够完整精确地提取建筑物的轮廓。采用文献[7]方法,建筑物的大致轮廓可以被准确提取,但有些细节未能提取到。采用文献[8]方法,提取建筑物的轮廓存在缺失现象。经对比发现,采用提出的方法能够更精确地提取建筑物的轮廓,因为本文方法对机载LiDAR点云数据进行了去噪处理,又采用了区域生长法分割激光脚点,进一步提高了建筑轮廓的提取精度。
2.4 重建耗时对比
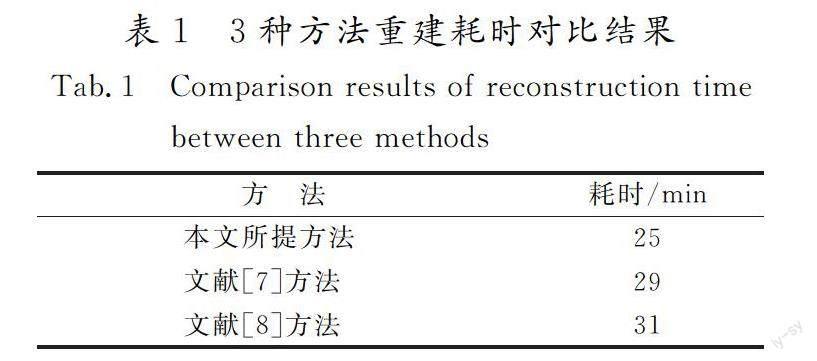
在上述实验环境下,分别利用提出的重建方法、文献[7]方法、文献[8]方法进行历史街区建筑重建,记录并对比耗時,具体实验结果如表1所示。
由表1结果可知,本文提出的方法重建耗时最短,为25 min,比文献[7]方法的重建耗时少4 min,比文献[8]方法的重建耗时少6 min。这是因为本文提出方法在提取特征信息前分割了激光脚点,获得建筑物的初始轮廓,并利用管子法对其进行了规则化,为后续建筑特征信息的提取及重建进行了铺垫,从而缩短了重建耗时。
3 结 语
为了提高历史文化街区重建的真实性与完整性,提高激光脚点吻合进度,研究了基于机载LiDAR点云数据的历史文化街区重建方法,研究结论如下。
1)机载LiDAR点云数据中噪声去除后,可以更精准地利用区域生长法分割激光脚点,使实验中提取到的激光脚点更符合实际的建筑物轮廓。
2)采用Alpha Shape法提取精准的建筑特征,利用管子法对其进行了规则化,缩短了历史文化街区建筑重建的耗时。
3)考虑了多边形轮廓线情况,采用分类强制正交法对其作规则化处理,优化了街区重建的效果,缩短了重建时间。在此基础上,通过平面拟合、直线拟合等方法,实现了历史文化街区的三维重建。
在接下来的研究中,会结合城市环境的复杂性,在历史文化街区的建设管理中进一步提高方法的环境适应性。
參考文献/References:
[1] 邓春凤,吕佳文.历史文化街区保护与更新研究——以桂林市正阳路东西巷为例[J].住宅科技,2021,41(1):38-41.
DENG Chunfeng,LYU Jiawen.Research on the protection and renewal of historical and cultural blocks:Take the east-west lane of Zhengyang road in Guilin as an example[J].Housing Science,2021,41(1):38-41.
[2] 黄璐,刘雪菲,易娇.历史文化街区的升级改造:基于AISAS的场景重塑研究[J].现代商贸工业,2021,42(9):15-17.
HUANG Lu,LIU Xuefei,YI Jiao.Upgrading and reconstruction of historical and cultural blocks:Research on scene reconstruction based on AISAS[J].Modern Business Trade Industry,2021,42(9):15-17.
[3] 郭亚栋,王贤昆,宿殿鹏,等.基于方向预测规则化的机载激光雷达建筑物正交轮廓线提取[J].激光与光电子学进展,2020,57(6):062801.
GUO Yadong,WANG Xiankun,SU Dianpeng,et al.Building orthogonal boundary extraction for airborne LiDAR based on directional prediction regularization[J].Laser & Optoelectronics Progress,2020,57(6):062801.
[4] 周嘉俊,李勇,何明,等.机载激光雷达点云多层次建筑物的三维重建[J].遥感信息,2019,34(5):76-80.
ZHOU Jiajun,LI Yong,HE Ming,et al.Three dimensional reconstruction of multi-level buildings from airborne LiDAR point clouds[J].Remote Sensing Information,2019,34(5):76-80.
[5] 高智梅,王竞雪,沈昭宇.机载LiDAR建筑物点云渐进提取算法[J].测绘通报,2021(8):7-13.
GAO Zhimei,WANG Jingxue,SHEN Zhaoyu.Aerial LiDAR building point-cloud progressive extraction algorithm[J].Bulletin of Surveying and Mapping,2021(8):7-13.
[6] 陈宇琪,罗一芬,龙竞帅,等.顾及上下文信息的城区机载LiDAR建筑物自动化提取方法研究[J].地理信息世界,2019,26(5):58-63.
CHEN Yuqi,LUO Yifen,LONG Jingshuai,et al.Contextual extraction of urban buildings from airborne LiDAR point cloud[J].Geomatics World,2019,26(5):58-63.
[7] 王竞雪,洪绍轩.结合区域生长及主成分分析的机载LiDAR建筑物点云提取[J].信号处理,2018,34(9):1094-1104.
WANG Jingxue,HONG Shaoxuan.Aerial LiDAR buildings point clouds extraction combining region growing and principal component analysis[J].Journal of Signal Processing,2018,34(9):1094-1104.
[8] 赵传,郭海涛,卢俊,等.基于深度残差网络的机载LiDAR点云分类[J].测绘学报,2020,49(2):202-213.
ZHAO Chuan,GUO Haitao,LU Jun,et al.Airborne LiDAR point cloud classification based on deep residual network[J].Acta Geodaetica et Cartographica Sinica,2020,49(2):202-213.
[9] 冯仕超,郭兴平,韩彦伟,等.基于三维激光扫描技术在崖墓保护中的应用[J].地理空间信息,2022,20(2):57-59.
FENG Shichao,GUO Xingping,HAN Yanwei,et al.Application of 3D laser scanning technology in the protection of rock-tombs[J].Geospatial Information,2022,20(2):57-59.
[10]王宏涛,雷相达,赵宗泽.融合光谱信息的机载LiDAR点云三维深度学习分类方法[J].激光与光电子学进展,2020,57(12):122802.
WANG Hongtao,LEI Xiangda,ZHAO Zongze.3D deep learning classification method for airborne LiDAR point clouds fusing spectral information[J].Laser & Optoelectronics Progress,2020,57(12):122802.
[11]趙赛男,闫利.利用基元分解的机载点云复杂建筑物自动重建[J].遥感信息,2018,33(3):70-76.
ZHAO Sainan,YAN Li.Building reconstruction from airborne LiDAR point clouds using primitive-based method[J].Remote Sensing Information,2018,33(3):70-76.
[12]杨业,李宏宁.基于机载LiDAR点云数据的电力线自动提取方法[J].激光与光电子学进展,2020,57(9):090102.
YANG Ye,LI Hongning.Automatic power line extraction method based on airborne LiDAR point cloud data[J].Laser & Optoelectronics Progress,2020,57(9):090102.
[13]WANG Qian,TAN Yi,MEI Zhongya.Computational methods of acquisition and processing of 3D point cloud data for construction applications[J].Archives of Computational Methods in Engineering,2020,27(2):479-499.
[14]杨钰琪,陈驰,杨必胜,等.基于UAV影像密集匹配点云多层次分割的建筑物层高变化检测[J].武汉大学学报(信息科学版),2021,46(4):489-496.
YANG Yuqi,CHEN Chi,YANG Bisheng,et al.3D change detection of buildings based on multi-level segmentation of dense matching point clouds from UAV images[J].Geomatics and Information Science of Wuhan University,2021,46(4):489-496.
[15]蔡湛,李如仁,李新科,等.一种基于激光点云数据的房屋轮廓线提取方法[J].地理与地理信息科学,2013,29(5):17-21.
CAI Zhan,LI Ruren,LI Xinke,et al.Building roof boundary extraction from LiDAR point cloud[J].Geography and Geo-Information Science,2013,29(5):17-21.
[16]GUO Ziye,LIU Hui,PANG Lei,et al.DBSCAN-based point cloud extraction for Tomographic synthetic aperture radar (TomoSAR) three-dimensional (3D) building reconstruction[J].International Journal of Remote Sensing,2021,42(6):2327-2349.
[17]ALBANO R.Investigation on roof segmentation for 3D building reconstruction from aerial LIDAR point clouds[J].Applied Sciences,2019,9(21):4674.
[18]陈俊吉,皮大伟,谢伯元,等.基于几何特征与三维点云特征的道路边沿识别算法[J].河北科技大学学报,2019,40(6):461-468.
CHEN Junji,PI Dawei,XIE Boyuan,et al.Curb recognition algorithm based on geometric characters and 3D point cloud features[J].Journal of Hebei University of Science and Technology,2019,40(6):461-468.
[19]吴越,李胜旺,白宇.用于三维重建的改进特征匹配策略[J].河北科技大学学报,2019,40(5):423-430.
WU Yue,LI Shengwang,BAI Yu.Improved feature matching strategy for 3D Reconstruction[J].Journal of Hebei University of Science and Technology,2019,40(5):423-430.
[20]BASSIER M,YOUSEFZADEH M,VERGAUWEN M.Comparison of 2D and 3D wall reconstruction algorithms from point cloud data for as-built BIM[J].Journal of Information Technology in Construction,2020,25:173-192.
[21]CHEN Jingdao,KIRA Z,CHO Y K.Deep learning approach to point cloud scene understanding for automated scan to 3D Reconstruction[J].Journal of Computing in Civil Engineering,2019,33(4):04019027.
[22]BASSIER M,VERGAUWEN M,POUX F.Point cloud vs.Mesh features for building interior classification[J].Remote Sensing,2020,12(14):2224.
[23]BOHAK C,SLEMENIK M,KORDEZ J,et al.Aerial LiDAR data augmentation for direct point-cloud visualisation[J].Sensors,2020,20(7):2089.
[24]ZDEMIR E.REMONDINO F.Classification of aerial point clouds with deep learning[J].The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2019,XLII-2/W13:103-110.
[25]WANG Cheng,HOU Shiwei,WEN Chenglu,et al.Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud[J].ISPRS Journal of Photogrammetry and Remote Sensing,2018,143:150-166.
[26]DEY E K,KURDI F T,AWRANGJEB M,et al.Effective selection of variable point neighbourhood for feature point extraction from aerial building point cloud data[J].Remote Sensing,2021,13(8):1520.
