星球探测机器人研究现状与发展展望
2023-05-19于登云
于登云,潘 博,马 超
(1. 中国航天科技集团有限公司,北京 100048;2. 北京空间飞行器总体设计部,北京 100094)
0 引 言
星球探测机器人是指能够适应地外天体表面环境,在星球表面平台固定或移动并携带科学探测仪器开展探测等活动的机器人。其主要优势包括拓展科学探测范围;满足科学仪器移动探测的需求;克服着陆精度的影响,运动到感兴趣的科学探测目标位置,解决科学探测目标实现与工程实施着陆点选取之间的矛盾[1-2]。人类深空探测活动极大地促进了星球探测机器人的发展。自20世纪70年代以来,星球探测机器人被广泛应用于地外天体巡视探测、行星表面及深层采样等任务,尤其在月球、火星等探测任务中发挥了重要的作用,取得了诸多珍贵的探测成果[3-6]。
苏联分别在1970年和1973年的“月球”17号(Luna 17)探测器和“月球”21号探测器任务中携带了“月球车”1号(Lunokhod 1)和“月球车”2号成功落月。“月球车”1号是人类航天史上第一辆月球车,开启了星球探测机器人巡视探测的新纪元。
美国在星球探测机器人领域起步较早,尤其在火星探测方面,先后实现了三代火星车在火星表面的巡视探测,在高可靠、长寿命、智能导航与多手段探测等方面领先。2020年美国发射的“毅力”号火星车携带并验证了无人机火面飞行技术,开启了移动机器人+飞行机器人协同探测的新阶段。
中国的星球探测机器人始于“玉兔”号月球车。“玉兔”号和它的姊妹“玉兔”2号分别实现了月球正面和背面的巡视探测,迈出了中国星球巡视探测的第一步,使中国成为世界上第三个实现地外天体巡视探测的国家。2021年“祝融”号火星车实现中国首次火星表面巡视探测,使中国成为世界上第二个实现火星巡视探测的国家。
随着天问二号小行星探测、天问三号火星采样返回、探月工程四期月球科研站基本型建设等重大工程任务的逐步开展与实施,中国深空探测的深度和广度进一步提升。在此背景下,星球探测机器人的作用愈发重要。本文在对星球探测机器人分类及其特点进行总结分析的基础上,分别以月球、火星及小行星探测为例,系统介绍了国内外深空探测任务星球探测机器人的发展现状,并对中国后续深空探测任务星球探测机器人的需求与挑战进行了分析,提出了星球探测机器人未来发展所急需突破的主要关键技术,以期为中国星球探测机器人的设计、研究与应用提供参考。
1 分类及特点
1.1 星球探测机器人分类
星球探测机器人主要包括平台固定类探测机器人和平台移动类探测机器人,其中平台移动类探测机器人又可分为轮式探测机器人、跳跃式探测机器人和旋翼式探测机器人等。
早期深空探测任务中,平台固定类探测机器人较为常见,如美国的“凤凰”号探测器、“洞察”号探测器等。平台固定类探测机器人往往以机械臂为主,用以执行规定的动作,如样品采样、封装及转移释放等动作,机械臂末端执行器可依据任务要求设计成特定形式的机械部件。目前工程成功应用的平台移动类探测机器人多为轮式星球探测机器人,如美国的“好奇”号、“毅力”号以及中国的“玉兔”号、“祝融”号等。轮式星球探测机器人具有机械结构简单、运动速度较快和控制容易等优点,但对复杂未知非结构环境(如松软土质或岩石密集的星球表面)的适应能力较差[7]。跳跃式星球探测机器人跳跃方式受地形约束小、运动灵活,相比于轮式探测机器人能够更好地完成复杂地形下的探测任务,在小行星、彗星等小天体探测领域具有较大优势,如日本的MINERVA-I[8]、MINERVA-II和德国的MA-SCOT[9-11]等。旋翼式星球探测机器人适用于对具有大气环境的星体实施探测,如与“毅力”号一起抵达火星的旋翼式探测机器人“机智”号(Ingenuity),其可通过借助大气环境提供的升力以较低的能源代价实现较远距离的飞行探测。
1.2 星球探测机器人特点
星球探测机器人的任务可以概括为:适应目标天体表面的各种环境,携带科学仪器开展移动探测活动,将探测数据回传及实施采样,甚至原位分析,并在未来还将担负基地建造、运营等任务。其主要功能包括适应任务全过程的力学环境和空间环境;着陆后安全到达星球表面;通过环境感知了解探测器周围环境信息,规划路径并运动至目标位置;对感兴趣的科学目标进行就位探测、筛选、取样、存贮及转移;建立测控与通信链路,接受指令,并将探测数据及分析结果传回地面。平台移动类探测机器人还应具备与地形条件相匹配的前进、后退、转向、爬坡、越障等能力。相应地,上述功能需求使得星球探测机器人在移动、能源、感知与导航、控制、热控等方面与其它航天器有着不同的特点。
在移动方面,平台移动类探测机器人的移动能力关系到星球探测机器人在星表地形下的通过能力,因此至关重要。苏联“月球车”1号是一辆8轮月球车,移动底盘对称装配8套扭力梁式独立悬架机构,转向通过两侧车轮差动实现,但其在月面行驶过程中遇到了车轮在疏松凹陷月壤中空转问题和推土效应。美国开发的三代火星车均采用6轮独立驱动,并使用前后共4个车轮独立转向的Rocker-bogie悬架形式,但是应用中仍然遇到了车轮沉陷、打滑及磨损的问题。中国“玉兔”号月球车采用6轮驱动、4轮转向的主副摇臂悬架形式,但摇臂采用固定式结构,收拢和展开能力不足[12]。“祝融”号火星车充分借鉴“玉兔”号研制经验,采用6个驱动轮主副摇臂悬架形式及主动悬架设计,车体高度、质心位置和轮间距可以自动调整,具有蠕动运动功能,沉陷脱困和爬坡能力得以提高[13]。
在能源方面,能源问题一直是星球探测机器人需要解决的难题,也是未来星球基地建设所要面临的重要挑战。无论是当前的星球探测机器人还是未来的星球基地,必须有稳定充足的能源动力供应,才能为各类仪器设备、采样作业工具以及通信导航等提供保障。苏联的“月球车”、美国的第一代和第二代火星车、中国的“玉兔”号月球车和“祝融”号火星车上安装有太阳能电池板为其供给能源,但太阳能电池板严格受日照窗口约束,易被月尘和火尘覆盖降低发电效率。美国第三代火星车“好奇”号和“毅力”号采用多任务同位素温差发电机(MMRTG)代替太阳能电池板为其供给能源,探测效率和工作寿命得以较大提升。
在感知与导航方面,星球探测机器人要在目标天体自然地形环境中行驶并安全到达预定工作点,必须具备危险与障碍识别、自身姿态与位置确定、目标位置确定、路径规划等能力。苏联“月球车”1号驶抵月表后,由于摄像机安装位置较低致使视场受限,加之受当时摄像技术限制,其回传画面明暗对比较强,使地面人员难以分辨石块和凹坑。目前星球探测机器人感知与导航系统一般配置双目相机,其环境感知通常采用基于相机的被动视觉环境感知方案,利用立体视觉匹配算法实现周围地形三维恢复与重建。星球探测机器人的绝对定位和相对定位一般采用基于视觉系统的图像匹配、基于里程计的航位推算、路标特征匹配等方法[14-17]。此外,近年来随着NASA在人工智能与空间信息感知方面的探索,其第三代火星车已较好地支持了对火星表面高价值科学目标的自主识别与测量,大幅提升了火星车的自主生存能力和巡视探测效率。
在控制方面,星球探测机器人可分为遥操作和自主控制两种形式。星球探测机器人的遥操作是指在相关机器人控制中把地面人员操作包含在控制回路中,任何的上层规划和认知决策都是由地面人员下达,而探测机器人本体只是负责相应的实体执行。当通信时效性满足,机器人在处理复杂任务时,尤其是在快速做出决策和处理极端情况时,遥操作将优于器上程序控制[18-19]。但当探测任务中目标天体距离遥远时,星球探测机器人通信时效性较难满足,需要考虑上传指令的时间延迟、空间遮挡、数据传输速率、长期可靠运行等因素。通过充分利用星球探测机器人软硬件资源和控制资源而实施自主控制,可解决时间延迟大与星球探测机器人控制实时性要求高之间的矛盾,提升任务执行效率[20]。
在热控方面,星球探测机器人热设计常面临着地外星体表面昼夜外热流变化较大的问题,如月球车即面临月昼高温下热排散问题和月夜没有太阳能可利用情况下温度环境保障问题,而这一问题在月面极区低太阳高度角及永久阴影坑内的探测过程中尤为突出。针对高温问题,星球探测机器人一般采用设备顶面布置方式,以缩短设备到顶板散热面的热传输途径,在极端高温情况下利用太阳能电池板遮阳等方式加以解决;针对月夜低温问题,利用两相流体回路将同位素热源的热能在需要时引入舱内,保证温度环境要求。星球探测机器人为解决光伏发电、电加热控制温度过程效率较低的问题,通常利用集热窗技术,白昼吸收热量并将能量存储于相变材料之中,夜晚材料凝固放热,保证机器人及其仪器设备始终处于合适的温度范围[21-22]。
由上述星球探测机器人任务功能和特点可知,现有星球探测机器人大多具有容错性高、环境感知能力强、拥有一定自主控制能力等优点,但现阶段仍存在移动速度较慢、能源获取方式单一、遥操作反应时间较长等不足。因此,面向未来的月球、火星长期驻留与探测任务,仍需进一步研究新型移动方式、新型能源获取方式以及新型通信、控制方式,以实现星球探测机器人的高机动性、高自主性、高可靠性。
2 发展现状
下面分别以月球、火星、小行星等目前人类探测器涉足过的地外天体为例,将星球探测机器人研究现状介绍如下。
2.1 月球探测机器人
1970年11月10日,苏联“月球”17号探测器成功发射,其上搭载了世界上第一辆月球车即“月球车”1号,并于11月17日在月面雨海(Mare Imbr-ium)成功着陆。着陆后“月球车”1号驶离着陆器,在月面进行了为期10个半月的科学考察。这辆月球车质量756 kg,长2.2 m,宽1.6 m,装有摄像机和同位素热源装置。它在月面上行驶了10 540 m,拍摄了20 000多张月面照片,直到1971年10月4日因同位素热源达到使用寿命才停止工作[23-24]。1973年1月8日发射的“月球”21号探测器,把“月球车”2号送上月面,如图1所示。该车在月面约四个月的时间里累积行驶了约39 km,成功完成了考察任务并取得了诸多成果。
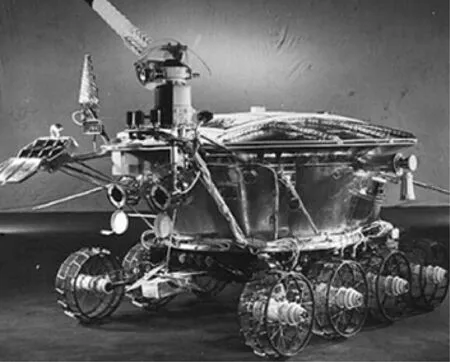
图1 “月球车”2号Fig.1 Lunokhod 2
俄罗斯联邦航天局制定过登陆月球的“月球-全球”(Luna-Glob)计划,原定于2012年发射,现已延期。其最新计划是在2024年发射“月球”25号探测器,在月球南极附近着陆对月表进行探测,并计划持续发射至“月球”31号探测器,最终目标是在2030年建立月球基地,但目前该计划尚未披露探测机器人的相关详细内容。
美国2004年提出了重返月球计划,宣布要向月球发射一系列无人探测器,并在2015年之前建立月球基地,开发和利用月球资源、能源和特殊环境等。2017年美国发布《太空政策1号令》(Space Policy Directive 1)调整重返月球计划,提出启动近月“门户”空间站(Gateway)和“阿耳忒弥斯”计划(Artemis Program),并为支持“阿耳忒弥斯”计划提出了“商业月球有效载荷服务”(CLPS)计划,该计划将于2024年发射VIPER(Volatiles investigating polar expl-oration rover)月球车,如图2所示,目的是前往月球南极近距离勘察水冰位置及浓度,为后续登陆及采样返回提供支持[25-27]。

图2 VIPERFig.2 VIPER
2022年12月11日,日本ispace公司Hakuto-R月球探测器发射,该探测器预计飞行3~5个月后着陆阿特拉斯陨石坑,并有望成为日本首个着陆月球的探测器。Hakuto-R上搭载了阿联酋首台月球车“拉希德”号(Rashid)和JAXA的SORA-Q可变形月球机器人。“拉希德”号质量10 kg,长535 mm,宽538.5 mm,携带有高分辨率相机和热成像仪等设备,如图3(a)所示。SORA-Q可变形月球机器人质量250 g,宽约80 mm,带有两台相机,初始构型为球型,可沿连接轴分离为两个半球作为车轮在月面移动并拍摄图像,如图3(b)所示。
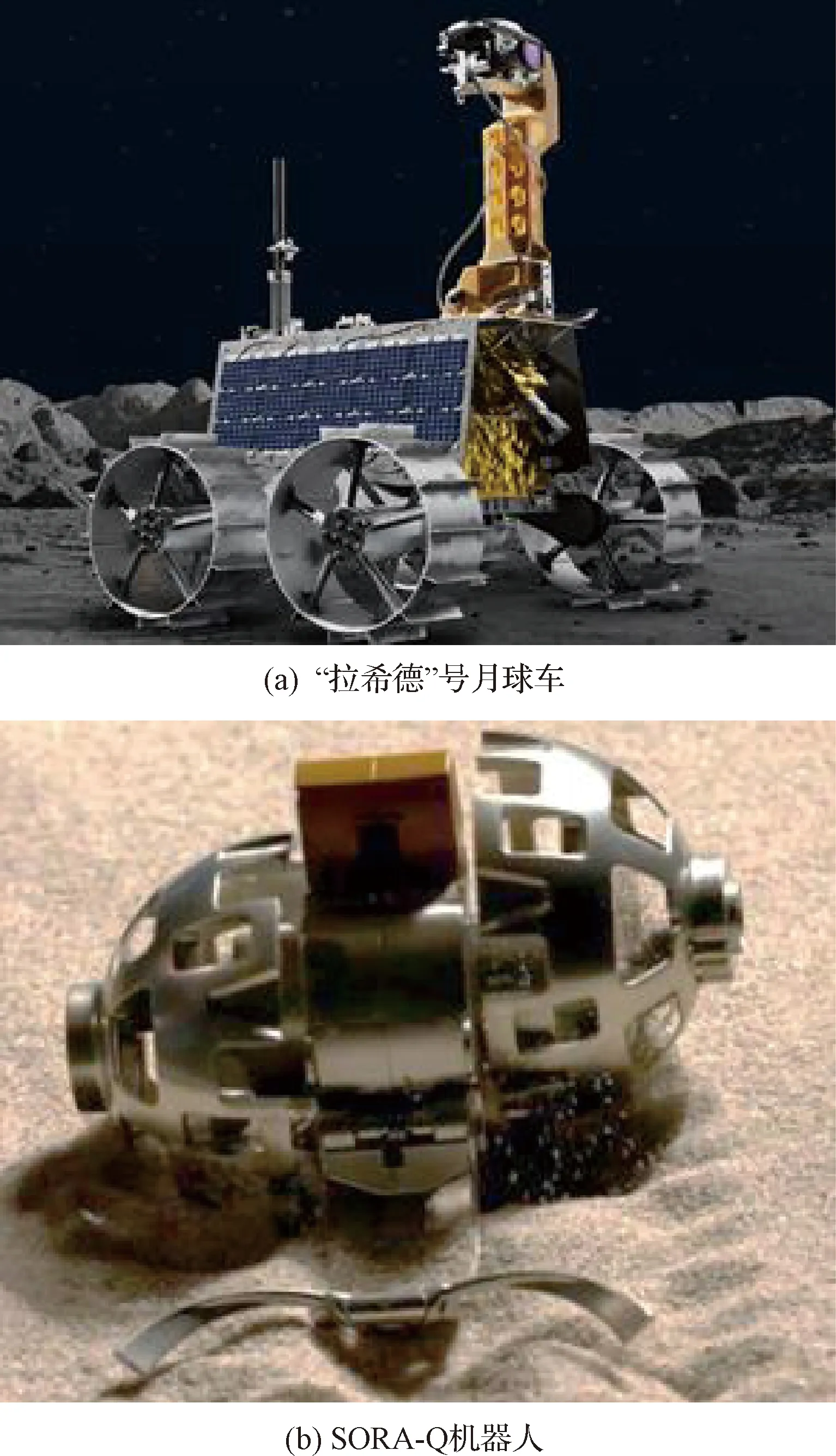
图3 “拉希德”号月球车和SORA-Q机器人Fig.3 The rover Rashid and the robot SORA-Q
中国嫦娥三号探测器搭载“玉兔”号月球车于2013年12月2日发射,开展了月面巡视勘察,如图4所示。嫦娥四号探测器搭载“玉兔”2号月球车于2018年12月8日发射,在月球背面开展了巡视勘察。嫦娥五号探测器携带表取采样机械臂于2020年11月24日发射,完成地外天体采样返回,12月17日嫦娥五号返回器携带月球样品着陆地球。
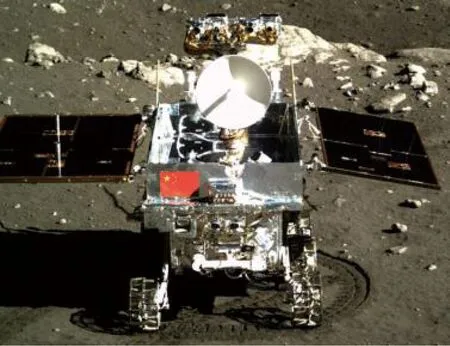
图4 “玉兔”号月球车Fig.4 The rover Yutu
2.2 火星探测机器人
近代的火星探索始于美国和苏联之间在20世纪60年代的太空竞赛。
1996年12月,NASA“探路者”探测器发射,携带了一台名为“索杰纳”的火星车,如图5所示。“索杰纳”号火星车于1997年7月4日成功登陆火星,质量只有11.5 kg,其在火星表面一定范围对火星的岩石和土壤进行了科学探测,并于同年的9月27日停止工作,总行驶里程约100 m。

图5 “索杰纳”号火星车Fig.5 The rover Sojourner
2003年6月和7月,NASA先后发射MER(Mars exploration rover)“勇气”号(MER-A Spirit)和“机遇”号(MER-B Opportunity)火星车,如图6所示。“勇气”号于2004年1月4日着陆火星,“机遇”号于2004年1月25日着陆火星。2009年“勇气”号被困在沙土中后,于2010年3月22号失去联系,自此地面再未收到任何通信; 2011年5月25日,NASA宣布“勇气”号任务正式结束,总行驶里程7.73 km。2018年6月10日“机遇”号遭遇沙尘暴,在其与地球通信后随即转入休眠模式,自此地球再未收到其来自火星的回应; 2019年2月14日,NASA在最后一次尝试唤醒无果后,宣布“机遇”号任务完成,“机遇”号以45.16 km的总行驶里程打破了地外天体移动纪录[28-29]。
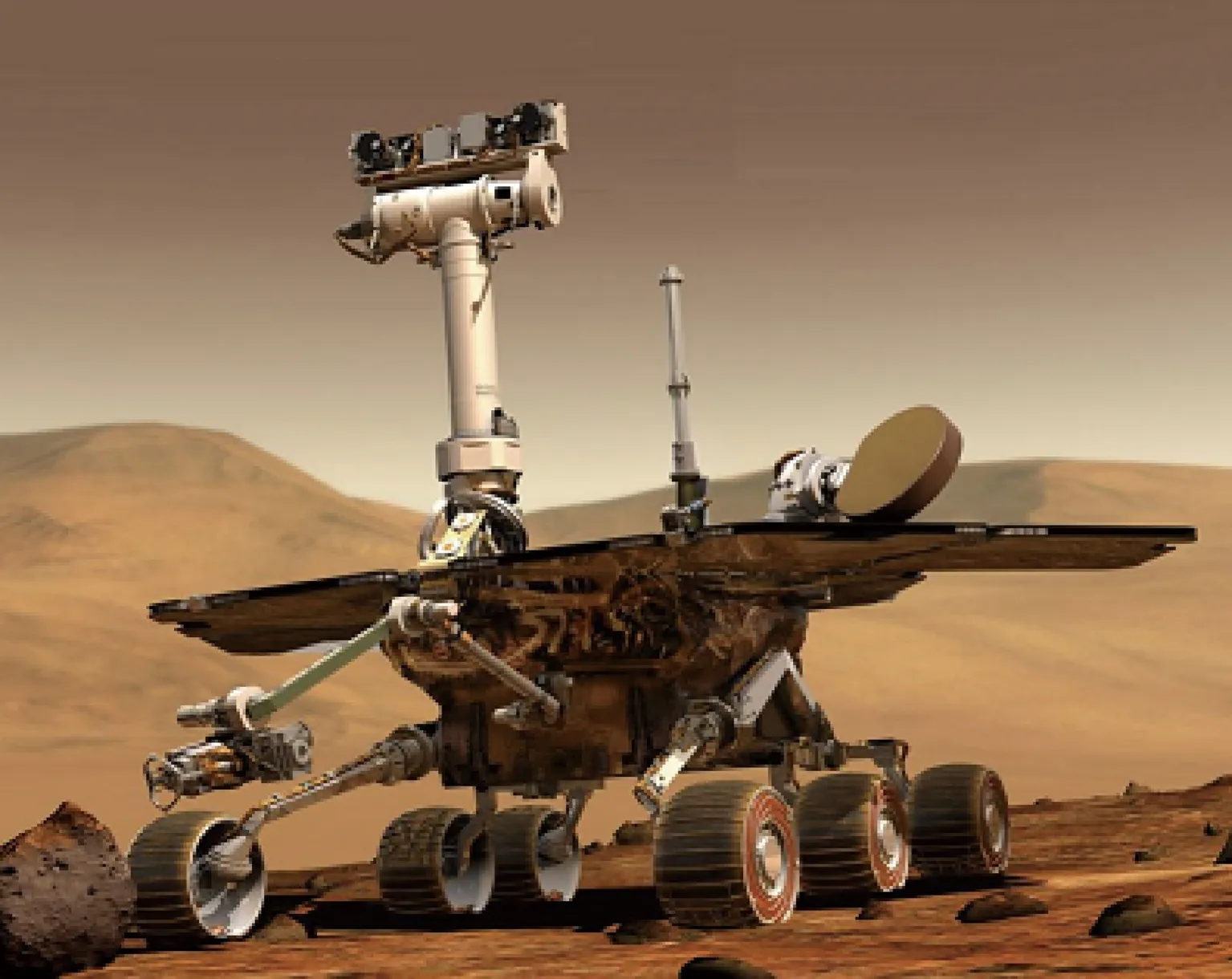
图6 “勇气”号/“机遇”号火星车Fig.6 The rover Spirit/Opportunity
2007年8月4日,NASA发射“凤凰”号(Phoe-nix)火星着陆探测器,于2008年5月25日在火星北极成功着陆。“凤凰”号计划针对火星冻水层实施为期90天的探测任务,用以探寻在火星干旱的表面下水存在的痕迹。“凤凰”号搭载了用以挖取火星表面及表面下层土壤样品的机械臂。该机械臂长2.35 m,有4个自由度,末端装有锯齿形刀片和波纹状尖锥,能在坚硬的极区冻土表面挖掘。机械臂还可为装在臂上的相机调整指向,引导测量传导性的探测器插入土壤。2008年11月2日,“凤凰”号发射的最后一个信号被地球接收到,至此“凤凰”号任务正式结束[30-31]。
2011年11月26日,NASA发射火星科学实验室(MSL)任务“好奇”号(Curiosity)火星车,于2012年7月6日成功着陆火星,如图7所示。“好奇”号是美国第四台着陆火星的火星车,同时也是世界上第一台采用核动力驱动的火星车,其主要任务是探索火星盖尔撞击坑,探寻火星上的生命元素。“好奇”号的机械臂备有钻头,可钻入岩石内部采集样本,并在机身内化验后将分析结果传回地球。截至2023年1月,“好奇”号仍在火星正常工作,行驶里程29.45 km[32-35]。
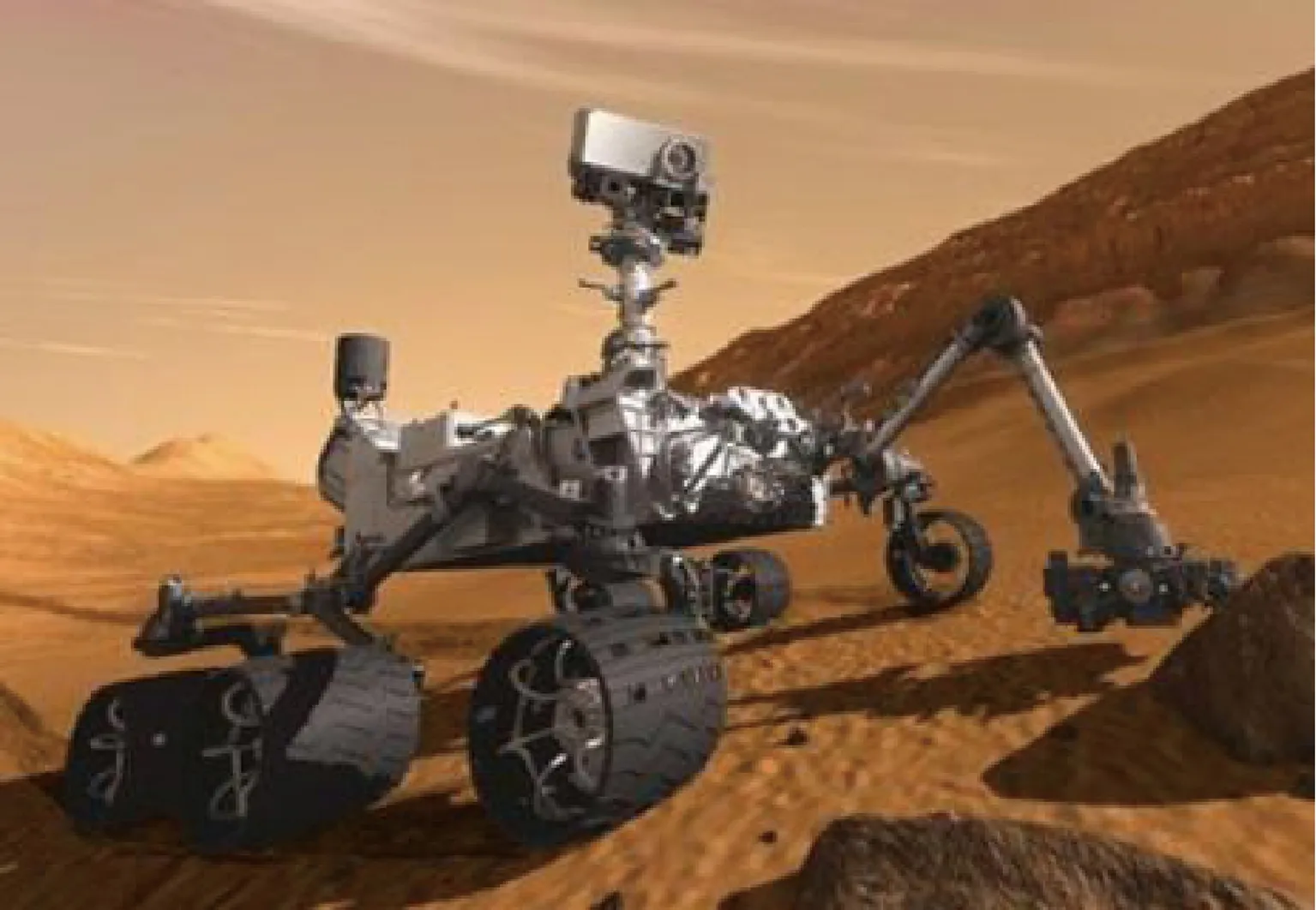
图7 “好奇”号火星车Fig.7 The rover Curiosity
2018年5月5日,NASA“洞察”号(InSight)火星着陆探测器发射,于2018年11月26日着陆火星。“洞察”号搭载了用于部署地震仪和热流仪的仪器部署机械臂。该机械臂长1.8 m,有4个自由度,末端为五指机械手,用于将地震仪和热流仪放置在火星表面。在着陆火星后机械臂成功安装了地震仪和热流仪,同时使用钻具在火星表面钻出了迄今为止最深的孔洞,并对火星内部的热状态进行了考察。“洞察”号携带的钻具是名为“鼹鼠”的自锤式探测器,但因其设计缺陷并未能像地面预期那样实现自动掘进。2022年12月21日,NASA宣布探测器电池电力耗尽,“洞察”号任务结束[36]。
2020年7月,NASA“火星-2020”任务携带“毅力”号(Perseverance)火星车发射,并于2021年2月抵达火星开启巡视探测之旅,如图8(a)所示。“毅力”号质量1 043 kg,携带有一架“机智”号火星无人机,如图8(b)所示。“毅力”号搭载的采样机械臂末端由9个钻头组成的钻具装置和光谱仪等组成,它们用于收集、分析火星岩石样本,但“毅力”号并不具备样品返回功能,这些样品被封存后投放在火星表面,等待后续火星探测器将其带回[37-38]。
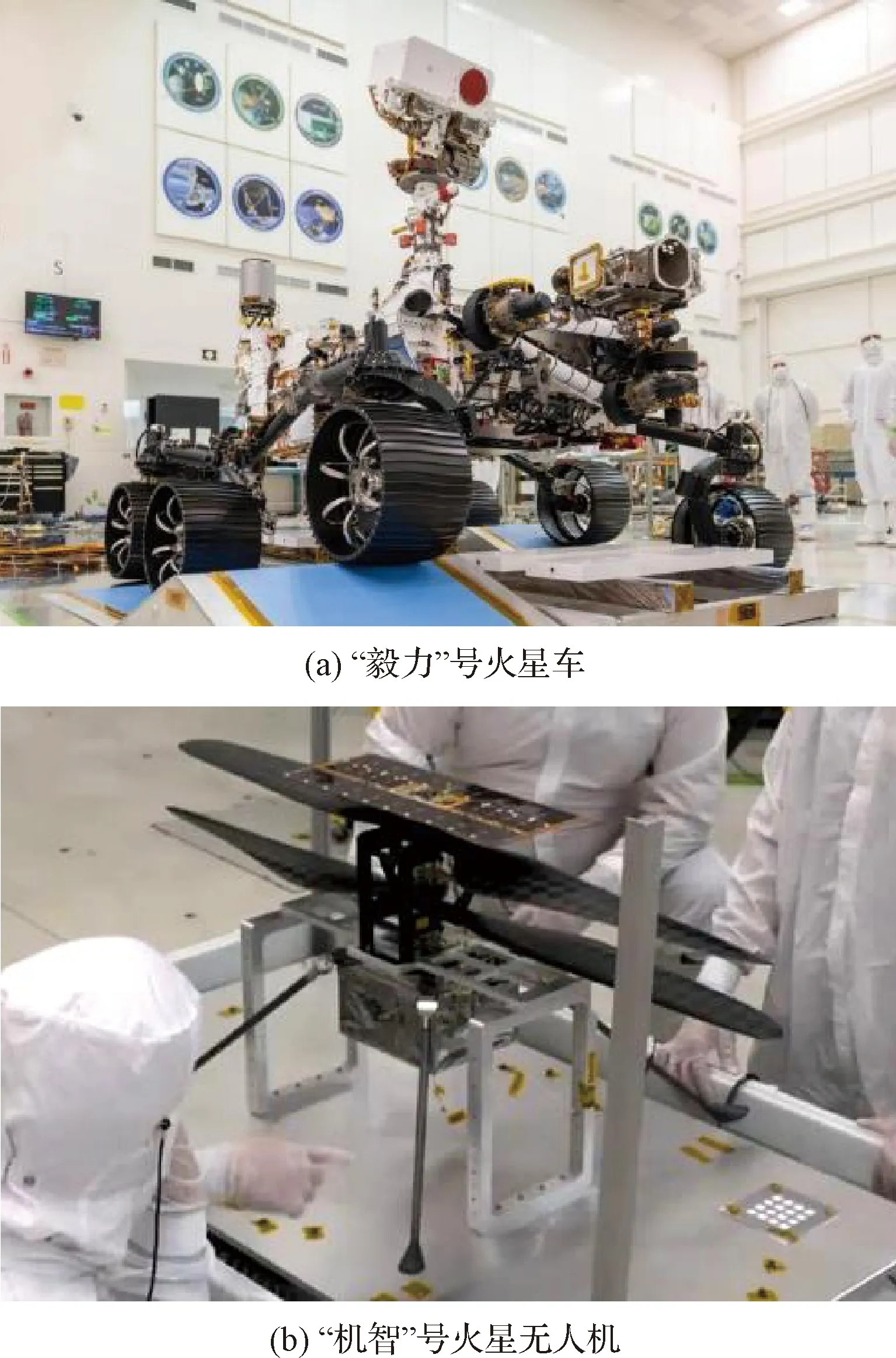
图8 “毅力”号火星车和“机智”号直升机Fig.8 The rover Perseverance and the helicopter Ingenuity
中国自2011年起开启火星探测方案论证和关键技术研究,2016年正式立项,通过一次任务实现对火星的环绕、着陆和巡视探测。2020年7月23日天问一号探测器搭载“祝融”号火星车发射,如图9所示。2021年2月10日天问一号探测器进入环火轨道。5月15日,着陆器成功着陆火星。5月22日,“祝融”号火星车驶抵火星表面,在火星表面开展了区域巡视探测,实施了对碎石、沙丘、浅坑等多地形探测任务,传回了大量科学数据。

图9 “祝融”号火星车Fig.9 The rover Zhurong
2.3 小行星探测机器人
近年来,美国和日本先后开展了多次针对小行星的探测任务,探测形式也由飞越探测发展为就位探测、采样返回等多种形式。其中,美国开展了形式多样的小行星探测任务,但多以绕飞探测为主;日本则成功实施了小行星采样返回任务,取得了小行星探测的领先地位。
2016年9月8日美国发射OSIRIS-REx(Origins spectral interpretation resource identification security regolith explorer)探测器。该探测器是美国发射的首个小行星采样返回探测器。2018年12月3日OSIRIS-REx抵达近地小行星贝努(Bennu),12月31日进入环贝努轨道,绕飞高度距贝努约1.6~2.1 km。绕飞期间OSIRIS-REx通过相机拼接了贝努的全表面影像图,并通过可见光与近红外光谱仪发现了贝努表面广泛分布着水合矿物和含碳物质。2020年10月20日,OSIRIS-REx成功到达贝努表面夜莺(Nightingale)采样区,使用其携带的TAGSAM机械臂(Touch-and-go sample arm mechanism)完成降落采样,获取了小行星表面风化层样品。2020年10月27日OSIRIS-REx顺利完成样品封装工作并返航,其样品返回舱计划于2023年9月返回地球[39]。
2003年5月9日,日本的“隼鸟”号(Hayabusa)探测器发射,其携带了一台微型跳跃机器人MINERVA-I,用以实施在小行星糸川(Itokawa)表面的着陆和移动探测任务。2005年“隼鸟”号飞抵目标星,但是MINERVA-I在小行星表面投放过程中失去联系。2007年“隼鸟”号在确认样品采集成功后于4月25日返航。2010年6月14日样品舱返回地球。
2014年12月3日,日本发射了“隼鸟”2号(Hayabusa 2)探测器,并携带了三台微型跳跃机器人MINERVA-II1 Rover-1A、MINERVA-II1 Rover-1B、MASCOT飞往编号1999 JU3的小行星龙宫(Ryugu)。2018年6月与该小行星交会着陆,期间,“隼鸟”2号投放了微型跳跃机器人等科学设备对小行星进行近距离观测、现场物质分析并成功采集了小行星表面的沙砾、星壤等。其中,2018年9月21日“隼鸟”2号释放MINERVA-II1 Rover-1A、MINERVA-II1 Rover-1B着陆龙宫,成功完成跳跃探测,实现了对小行星表面的多点探测,如图10所示;2018年10月3日“隼鸟”2号释放MASCOT着陆龙宫,同样完成了跳跃和多点探测。2019年12月“隼鸟”2号从小行星出发返回地球。2020年12月样品舱返回地球并成功回收。“隼鸟”2号在与样品舱分离后继续其太空之旅,预计在2031年抵达编号1998KY26的小行星进行绕飞探测。
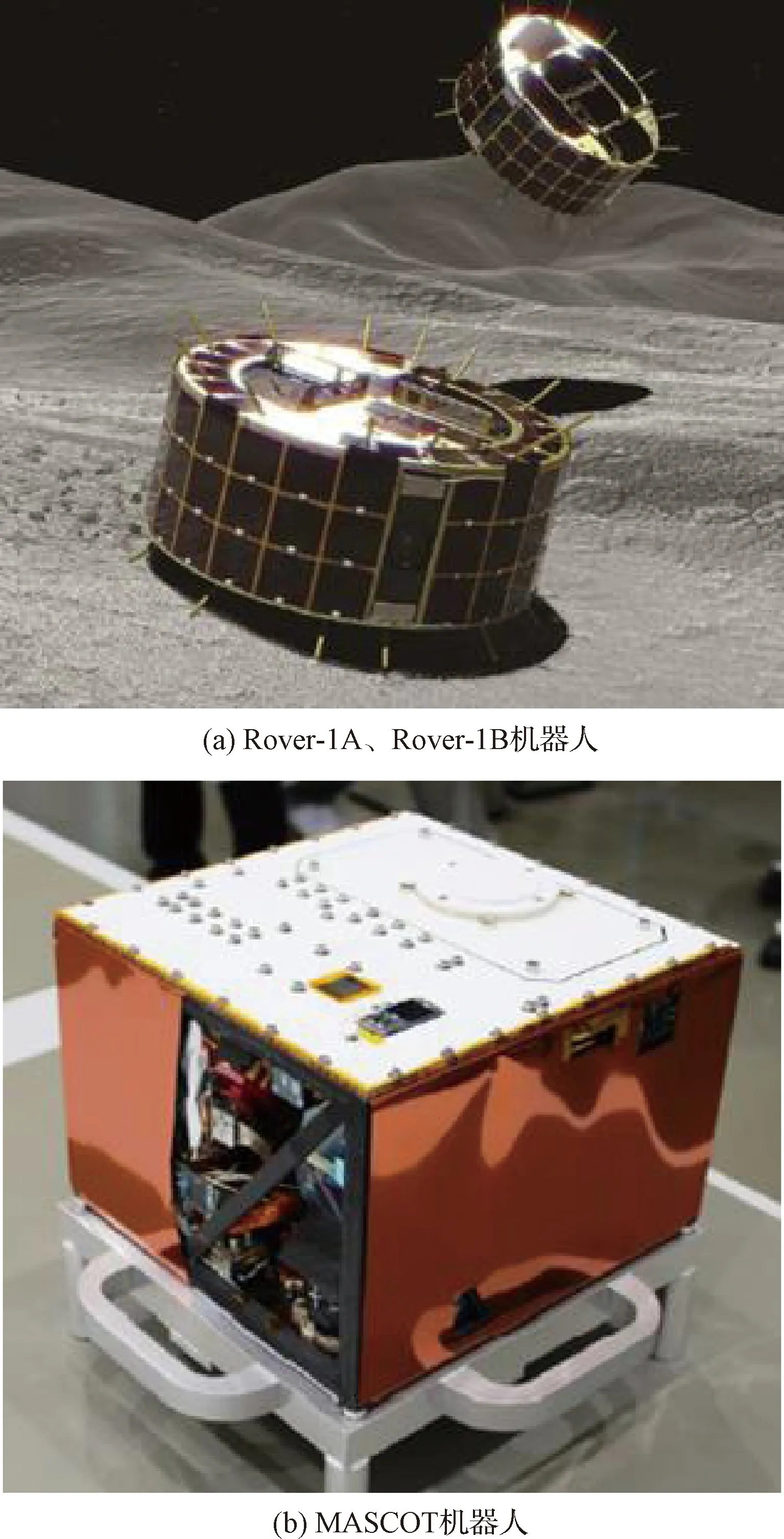
图10 Rover-1A、Rover-1B及MASCOT机器人Fig.10 The Rover-1A, Rover-1B and MASCOT
3 未来需求
从以上国内外各类深空探测任务及星球探测机器人的发展现状可以看出,星球探测机器人在深空探测任务中的作用愈发凸显,并随着任务复杂程度的提升而逐渐成为影响探测任务成败的重要因素。
以中国后续深空探测任务为例,嫦娥六号计划于2025年前后发射,执行月球背面采样返回任务。嫦娥七号计划于2026年前后着陆于月球南极,携带轮式探测机器人和飞跃探测机器人开展月球南极环境探测与资源勘查。嫦娥八号计划于2028年前后发射,携带多功能着陆器和若干智能操作机器人并与嫦娥七号共同组成月球科研站基本型。天问二号计划于2025年前后发射,执行对近地小行星的伴飞、附着、取样返回及对主带彗星的绕飞探测任务。天问三号计划于2030年前后发射,执行火星样品采样返回任务。在上述及未来地外天体无人探测、无人月球科研站基本型建造与运营等任务中,星球探测机器人的任务需求将扩展到不同地外天体表面的着陆、附着、巡视与数据收集、样品采集与存储、原位资源利用等活动,这对中国星球探测机器人技术的发展提出了更高的要求。为满足这一发展需求,星球探测机器人将呈现四个主要发展趋势,即移动能力增强化、执行机构多样化、感知决策智能化和协同工作集群化。
1)移动能力增强化。在未来星球探测的任务场景中,星球探测机器人将作为地外天体探测的主要移动平台。目前的星球探测机器人仅能以较低的速度机动,移动效率大大降低,在未来复杂星球环境下的应用必将受到限制。随着任务对科学载荷的搭载能力、高价值科学目标的探测能力、复杂环境下的作业能力等需求的不断提升,对星球探测机器人在平台负载能力、复杂地形可达能力等方面提出了更高的要求。发展趋势具体表现在负载能力增强化、移动系统架构复合化和可变化、移动形式多样化等方面。
2)执行机构多样化。随着星球探测机器人执行任务的不断丰富,星球探测机器人需要搭载多样化、多功能化的执行机构以满足不同的任务和功能需求,如实现星球样品采集、星球原位探测、物品运输与转移、基础设施构建与维修等多样化功能。发展趋势具体表现在轻量化高集成度关节、轻量化可变刚度车轮及腿足、多功能末端操作工具、多模式采样装置等方面。
3)感知决策智能化。针对未来地外天体科研站、深空探测场景下执行复杂新型任务的需求,对星球探测机器人的自主感知能力和决策智能化程度提出了更高的要求。如在感知方面,需进一步提升对星球表面科学目标的自主识别与测量能力;在规划与控制方面,需进一步提升星球探测机器人的自主生存能力与协调运动控制能力,提高探测效率。发展趋势具体表现在空间智能感知、空间智能决策、规划与控制等方面。
4)协同工作集群化。机器人集群化是指由多个聚集在一定空间内的机器人,通过相互之间有机的交互、协调和控制,使机器人群体表现出来的复合行为。集群协同工作将是星球探测机器人执行未来深空探测任务的主要形式,通过多机协同提高单一探测机器人有限的探测能力、分析能力、搬运能力和操作能力,从而大幅提升探测效率。发展趋势具体表现在探测机器人集群巡视、编队勘察、协同搬运、协同装配等方面。在未来深空探测任务中,星球探测机器人集群化有着巨大的应用潜力。
4 主要关键技术
可以预见,未来深空探测任务数量将进一步增长,随着技术研究与工程实践的深入,星球探测机器人需求增长的同时也将面临愈来愈多的技术挑战,其主要关键技术至少包括以下四个方面。
1)复杂环境强适应技术。根据嫦娥七号和嫦娥八号任务,中国后续月球探测任务将重点针对极区及永久阴影区水冰探测等科学目标和月球资源开发利用等工程目标开展。这要求月球探测机器人具备在月球极区及永久阴影坑重复着陆、连续行走和原位采样分析等能力,为月球科研站建设奠定技术基础。考虑到探测任务中月球探测机器人将面临极区低太阳高度角、永久阴影坑内极低温环境(最低可达38 K)、极区月貌月壤特性未知、永久阴影坑内光照条件恶劣等任务难点,需要在极低温环境驱动传动、鲁棒行走控制、极弱光照条件下感知规划等方面取得技术突破,从而支撑月球极区复杂环境下的巡视与采样探测等任务。
2)多机器人协同技术。面向中国未来月球科研站建设和运营等长期任务,需要更多不同类型的星球探测机器人来满足科研站建造、运行、科学实验、原位资源利用等多阶段、多种类的科学与工程需求,如图11所示。星球探测机器人将面临月面导航信息有限、信息获取手段匮乏、月面环境下月基装备长期工作失效机理复杂等诸多难题,迫切需要在机器人复杂环境多维度感知与融合、多机器人协同任务规划与控制等方面取得技术突破,来支撑未来月球科研站建设和运营、原位资源利用等核心任务[40-41]。
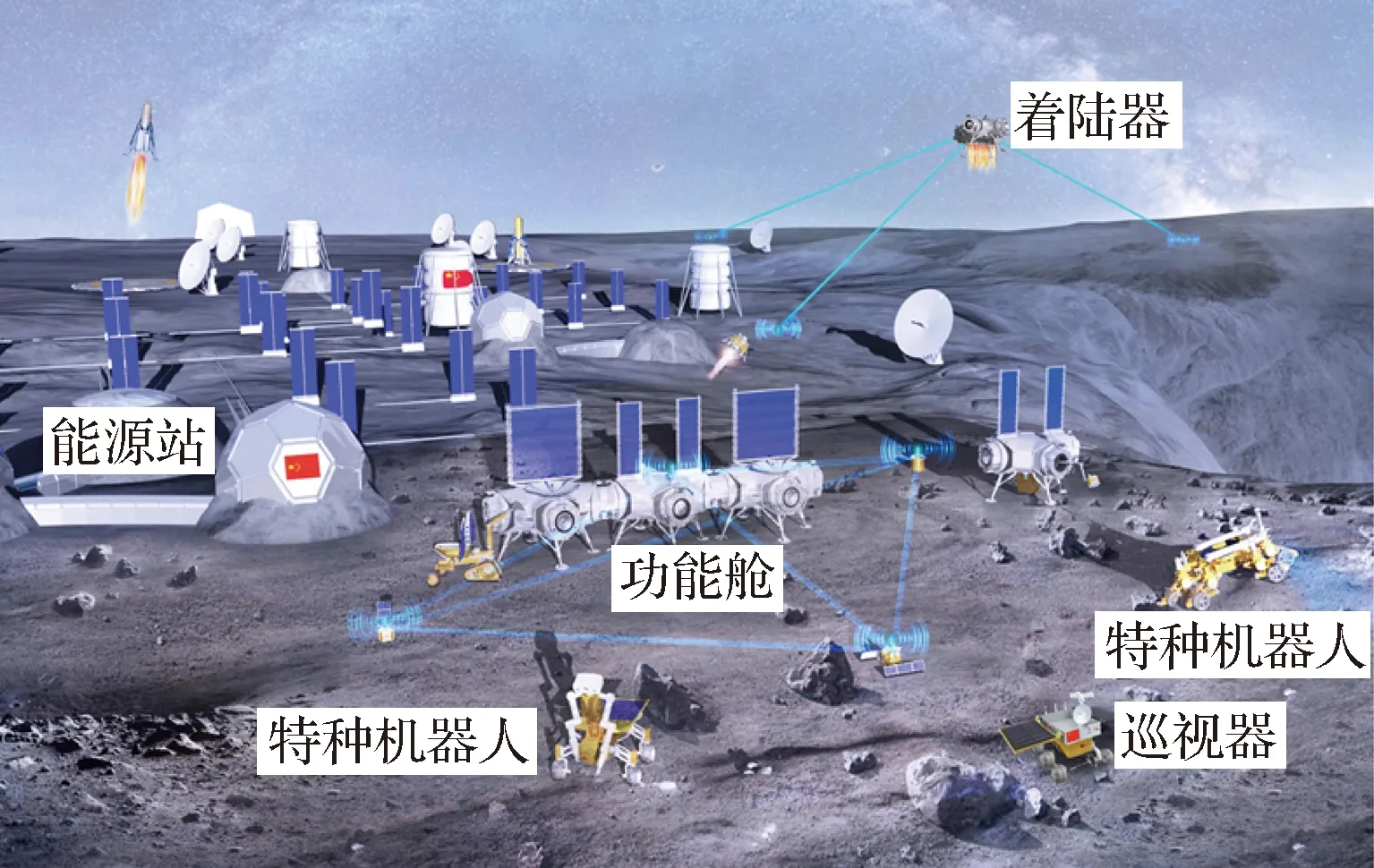
图11 中国未来月球科研站星球探测机器人概念图[40]Fig.11 Conception of planetary exploration robots in China’s future lunar research station [40]
3)自主运动及智能控制技术。未来中国将实施火星样品采样返回和月球科研站建设等任务,以进一步提升对火星和月球的认知深度,这对其探测机器人的自主运动及智能控制技术提出了新要求。比如,火星采样返回任务可能需要火星探测机器人具备自主运动及智能控制能力,以支撑探测机器人火面巡视勘察、表面采样封装、样品转移等集成作业需求,如图12所示。但是在火星取样返回任务中,如果采用火星探测机器人,则其将面临火地通信距离远、时延大、带宽低以及能源、天气环境等诸多严苛约束,同时还需面对火星地形地貌环境非结构化且无法完全、精确预知等任务难点,无法完成实时响应控制,给导航定位造成极大困难。因此需在同步定位与建图、智能自主行驶、自主健康与能量管理等方面取得技术突破,以支撑火面巡视勘察、资源探测,勘探点样品采集、封装、转移,仪器投放和科学实验等相关任务。
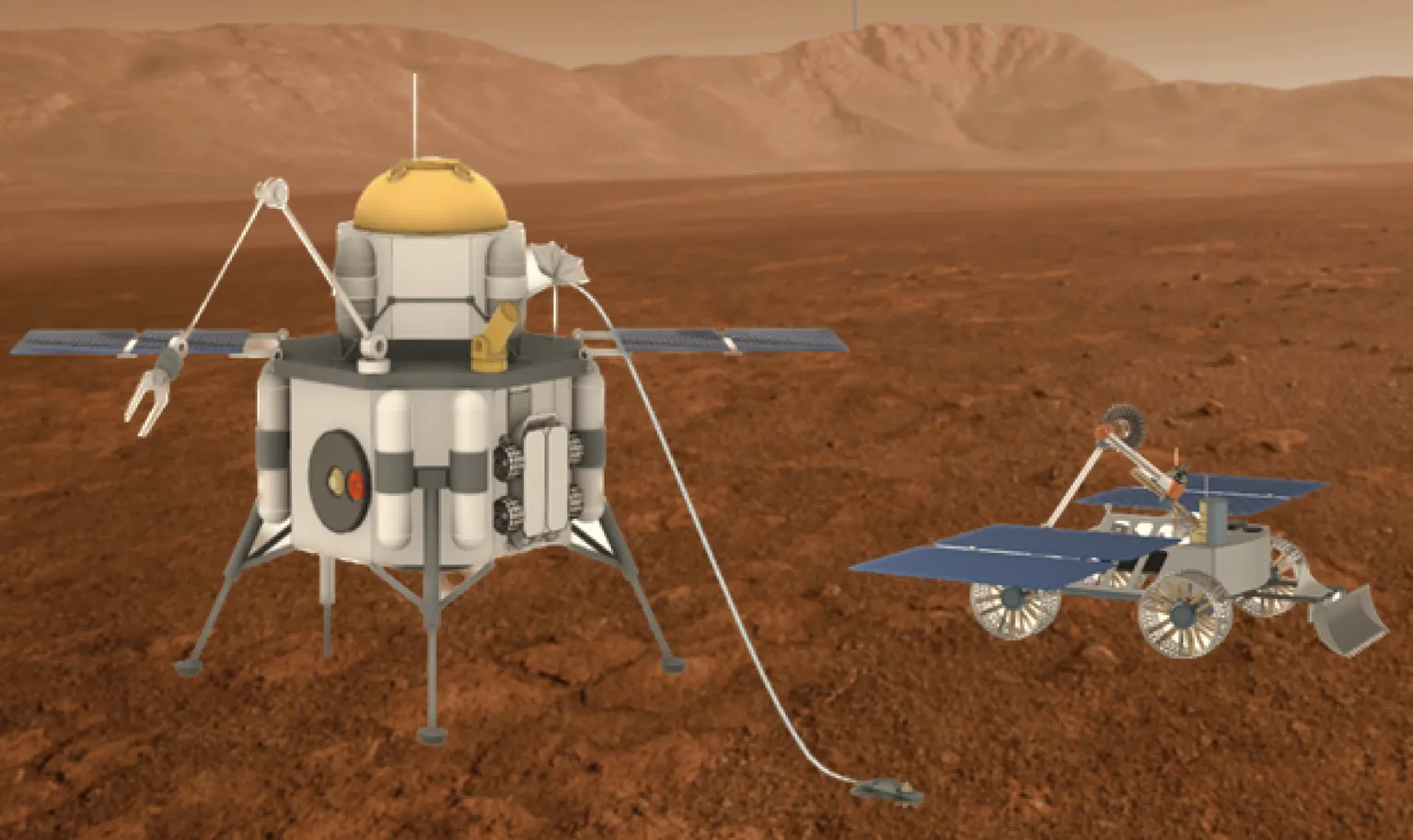
图12 中国未来火星探测机器人概念图Fig.12 Conception of China’s future Mars exploration robots
4)弱引力附着固定与采样技术。未来小行星采样探测将要求探测机器人实现在小行星表面的附着固定与采样探测等工作,如图13所示。但受限于小行星表面引力微弱,固定区域岩石的起伏状态、微观形貌、力学特性均无法准确获知,对小行星探测机器人的固定与采样功能的设计与验证将带来较大挑战。特别是针对硬度高、相糙度小的岩石表面尚无有效固定手段,加之地面试验中目标模拟物的设计也缺乏可参照的标准和经验,同时还存在着因微重力模拟时长有限导致的采样、固定试验无法进行连续和全面验证等诸多挑战。因此,需要在小行星探测机器人的设计,尤其是在其固定与釆样装置的创新设计、装置与星球表面接触力学分析与固定、采样概率仿真、地面微重力模拟试验与评估等方面实现技术突破,以支撑中国小行星采样探测任务的顺利实施。
图13 天问二号探测器概念图Fig.13 Conception of the Tianwen 2
5 结束语
星球探测机器人是地外天体探测日趋关注和发展的核心装备。本文面向中国未来月球科研站、火星采样返回、小行星探测等深空探测任务对星球探测机器人的需求,围绕星球探测机器人的研究现状与发展趋势开展了综述,概述了星球探测机器人的分类及其特点,并以月球、火星及小行星探测为例,介绍了在轨的星球探测机器人的情况。在此基础上系统总结了中国未来星球探测机器人的技术需求与挑战及需突破的主要关键技术,为未来星球探测机器人的设计与研制工作提供参考。
