地月空间发展的若干工程与技术问题
2023-05-19张育林刘红卫高永飞程子龙李泰博胡瑞军
张育林,刘红卫,蒋 超,高永飞,程子龙,李泰博,胡瑞军,周 昊
(1. 浙江大学控制科学与工程学院,杭州 310027;2. 军事科学院国防科技创新研究院,北京 100071;3. 北京跟踪与通信技术研究所,北京 100094;4. 中国航天员科研训练中心,北京 100094;5. 国防科技大学空天科学学院,长沙 410073;6. 西北工业大学航天学院,西安 710072)
0 引 言
地球是人类的摇篮,但人类不可能永远被束缚在摇篮之中。载人月球探测就是人类文明挣脱地球引力的禁锢,走向宇宙空间新的伟大迁徙的前沿探索和预演。月球是人类利用化学火箭技术可以便捷往返的唯一地外天体,是人类可以利用的地外资源聚集区。以载人月球探测为牵引,支撑国家利益向地月空间拓展,推动人类命运共同体向宇宙空间延伸,是航天事业特别是载人航天和深空探测创新发展的应有之义和不可推卸的历史责任。
地月空间是指受地球-月球系统引力影响的区域,包括近地空间、地月转移空间和月球空间[1],如图1所示。受地月引力共同作用,地月空间的轨道动力学特征较为复杂,包含3个共线平动点和2个三角平动点,在动力学方面表现为鞍点和中心点。在共线平动点附近,存在中心流形和不变流形;在三角平动点附近,存在长周期轨道、短周期轨道等。地月转移轨道、平动点附近周期轨道(如晕轨道、近直线轨道、远距离逆行轨道等)为地月空间飞行、驻留的轨道设计和基础设施建设提供了科学依据。
人类在近地空间开展了广泛的航天活动,建立了通信、遥感、导航、数据中继、气象等天基系统,并在地球低轨道上掌握了空间站建设与运营技术,实现了载人/货运飞船天地往返、地球轨道交会对接、航天员在轨长期驻留、出舱活动等。月球是距离地球最近的天体,将地月空间资源甚至太阳系资源纳入人类社会发展将是人类拓展生存空间、寻求新经济增长点的必然选择[2]。地月空间的建设与发展可以为人类在地球上形成的巨大过剩产能提供无限的释放空间,为人类社会生产力的持续进步提供源源不断的太空物质和能源,从而使人类社会发展突破地球空间的限制,推动人类文明发展进入一个全新的阶段。在人类首次登月50年之后,全球航天技术的发展再次聚焦到月球,美、俄等航天大国宣布开展载人月球探测计划[3-4],推动地月空间发展。这不简单是为了登月而登月,而是以实现人类在地月空间的长期驻留为基本条件,以地月空间资源开发与经济圈建设为核心要素,以支撑国家利益由地球中心向地月空间深度拓展为终极目标[5]。
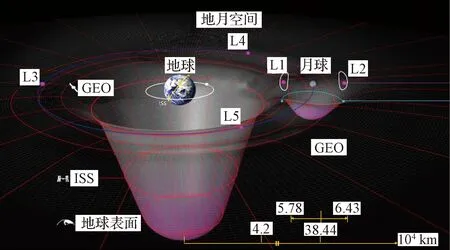
图1 地月空间Fig.1 The cislunar space
在地月空间发展过程中,人类将在整个地月空间范围内开展太空探索、科学研究以及生产活动,利用太空中的物质和资源创造产品服务,将人类社会文明从地球系统延伸至地月系统。地月空间发展涉及的关键工程与技术问题包括地月空间运输体系、地月空间资源勘探与利用、地月空间基础设施、月面建设与月面机器人、地月空间经济圈建设等。地月空间发展是一个极其庞大的工程体系,涉及方方面面的问题,需要系统性地分析,科学性地加以解决。本文将从地月空间发展体系架构的角度,研究解决这些问题的基本方法。
第1节研究经济可持续的地月空间运输体系,根据不同飞行阶段的物理特征,提出飞行器可重复使用方法。同时,考虑到在近地轨道空间站方面已经形成了成熟的天地往返和在轨驻留能力,研究空间站与载人月球探测的一体化实施策略。
第2节分析地月空间资源利用与基础设施建设中的关键技术与实现方法。其中,资源勘探与利用体系用于从月球、近地小天体等获取资源,降低对地球资源的依赖。地月空间基础设施用于提供基础性服务,如地月空间导航系统、地球静止轨道环、空间太阳能电站、月面电气化运输设施等。
第3节研究月面机器人。月球环境的严酷性以及人力资源的极端稀缺性,迫切需要月面机器人的参与,以提高载人月球探测的范围和效率。这一节将研究如何在月球建设中发挥机器人的先导性和主力军作用,分析月面设施准备与维护机器人、航天员伴随与辅助机器人、月球极区太阳同步探测及其路径规划等。
第4节讨论地月空间经济圈的相关问题。经济可持续是任何航天计划持久发展的根本保证,地月空间发展也不例外。地月空间发展最终能否形成一个可持续的经济圈,关键在于能否生产出可以满足大众需求的产品和服务,并使其得到有效分配。这一节将分析地月空间经济圈发展的意义、历史机遇及需要注意的关键问题。
第5节是结论,给出了地月空间发展相关工程与技术问题的研究结论。
1 经济可持续的地月空间运输体系
建立经济可持续的地月空间运输体系是地月空间发展的基础。地月空间是利用化学火箭推进技术可以有效构建运输体系的太空区域。但是,利用一次性的化学推进火箭往返于地球表面与月球表面的代价十分昂贵,这会导致地月空间的任何资源利用和大众太空旅行在经济上都不具有可承受性。因此,在人类已经掌握了地球低轨道空间站建设运营和部分可重复使用的天地往返运输技术的已有发展基础上,需要探索建立利用月球资源和以空间站为中转节点的可重复使用地月空间运输体系,如图2所示。
1.1 可重复使用的地月空间运输体系
当前太空探索活动成本高昂,从地球运送物资到低地球轨道(LEO)的每千克成本为4 000~10 000美元,到达地球静止轨道是到达LEO的4倍,到达月球表面的成本是到达LEO的9倍[5]。实现经济可持续的地月空间开发利用,其关键是大幅降低运输成本,而降低运输成本的关键是实现飞行器的可重复使用以及基于地外资源的推进剂补加。
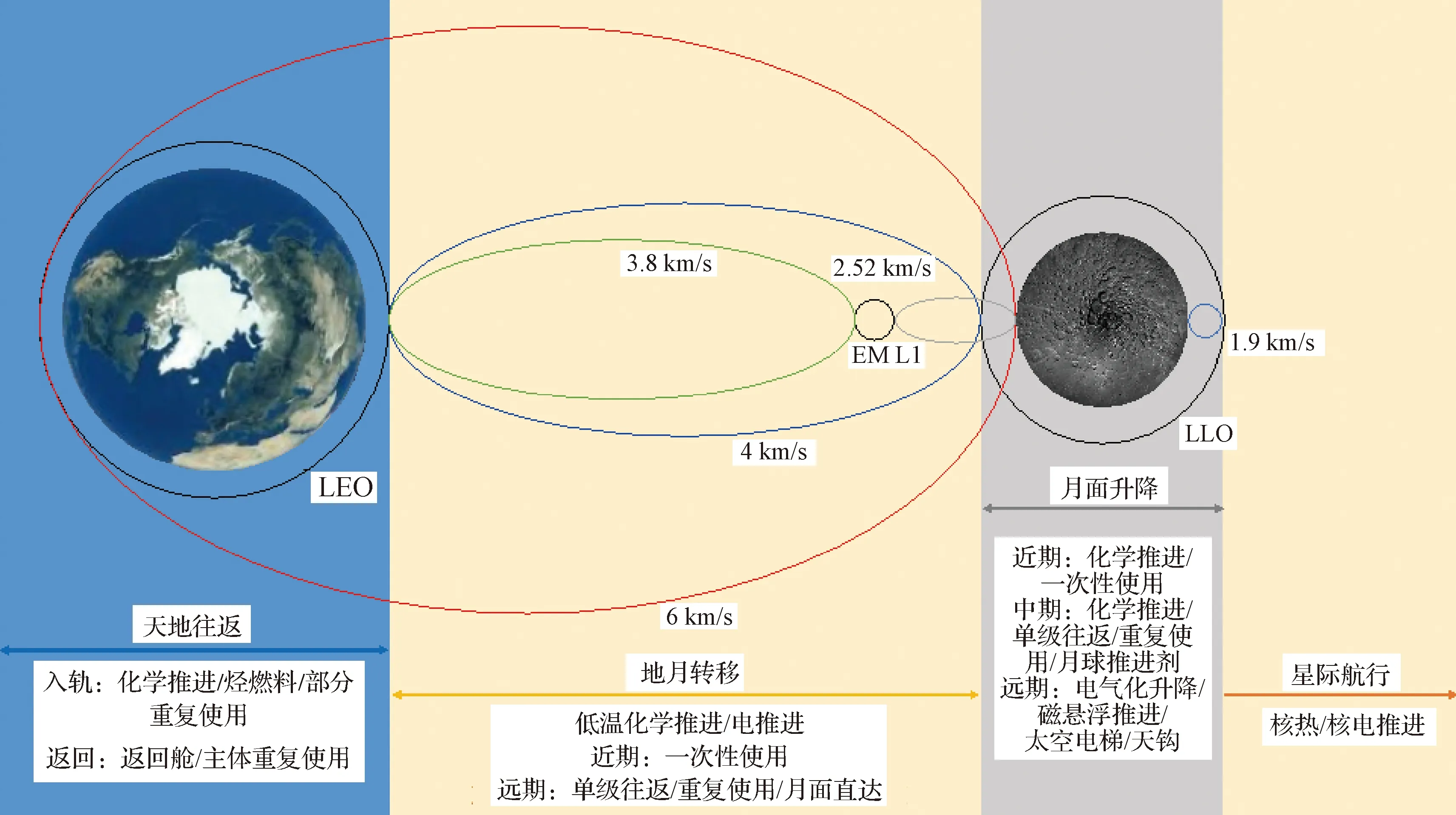
图2 地月空间运输体系Fig.2 Cislunar space transportation architecture
1.1.1体系组成与划分
从地月空间物理属性来看,地月空间运输可以划分为地球表面与LEO之间的天地往返、LEO与月球低轨道(LLO)之间的地月转移、LLO与月球表面之间的月面升降3个阶段[6]。LEO空间站和月球轨道空间站作为共用基础设施,承担着中转站和补给站的角色。
天地往返运输为跨大气层飞行,必须承受强烈的气动力热载荷,且所需的速度增量(约10 km/s)是地月空间往返所需速度增量的主要部分,也是最为复杂和昂贵的阶段。不过,作为LEO载人航天的一部分,其相关技术已经成熟,包括载人飞船穿越大气层的天地往返、LEO交会对接、在轨长期驻留、出舱活动等;另外,中国载人航天工程利用“神舟”飞船和长征二号F火箭构建了相对成熟的天地往返运输系统,中国空间站等LEO资源已初步形成,可为LEO飞行器提供在轨服务。在天地往返系统中,主要飞行器包括运载火箭和载人飞船,以SpaceX为代表的商业航天公司实现了运载火箭助推级、芯一级的回收和重复使用,以“龙”飞船为代表的新一代载人飞船实现了返回舱的部分重复使用。
地月转移运输包括从LEO到地月空间中各类驻留轨道的往返飞行,主要在真空和弱重力环境中飞行。LEO以远的地月空间飞行器不受气动载荷影响,结构可以更轻,单级火箭便可满足大部分往返任务所需的推进需求,见1.1.2节。在地月转移系统中,主要飞行器是地月转移飞行器。飞行器从月球返回并停靠于LEO空间站以实现重复使用,主要有两种方式:一种借助化学火箭推力实现近地制动;另一种借助大气减速,即通过设计再入轨道以可承受的能量消耗和气动损耗停靠于空间站。
月面升降运输为真空低重力飞行。月球是无大气低重力天体,环绕速度(1.67 km/s)和逃逸速度(2.37 km/s)相比地球较低。利用化学推进的单级可重复使用月面升降系统具有技术可行性;采用磁悬浮推进与制动、太空电梯、太空缆绳等先进技术构建可重复使用月面升降系统不存在不可逾越的技术障碍,月球表面到月球低轨道的电气化往返运输有可能实现,详见2.3节。
月球两极存在大量水冰,利用表岩屑作为催化剂,通过太阳能电解水为氢、氧,可以用作火箭推进剂或者为航天员提供生存保障。氢和氧是已知能量最高的化学推进剂,采用基于液氢液氧推进剂的低温火箭发动机构建地月空间运输系统具有现实意义。
1.1.2可行性分析
下面从地月空间往返飞行所需速度增量的角度,分析地月空间运输体系重复使用的可行性。以LEO高度400 km、LLO高度200 km为例,从LEO出发转移至LLO所需的速度增量约为4 km/s;从LLO出发转移至月面所需的速度增量约为1.9 km/s;从LEO出发转移至地月L1(EM L1)晕轨道所需的速度增量为3.8 km/s;从月球表面出发转移至EM L1晕轨道所需的速度增量为2.52 km/s。实现地月空间运输可重复使用的前提是在给定结构比、载荷比的条件下,单级化学火箭能够提供地月转移飞行器往返飞行所需的速度增量,如表1所示。
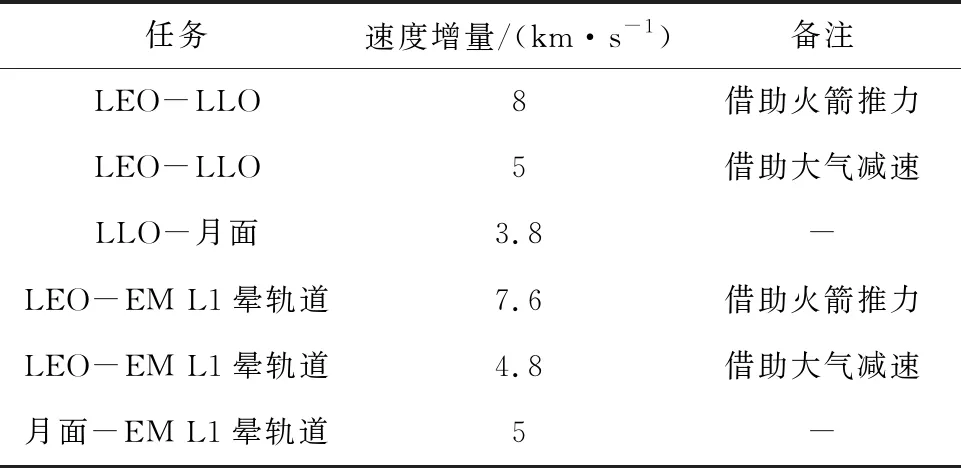
表1 地月空间往返飞行任务所需的速度增量Table 1 Velocity increment demands for the cislunar round-trip flight missions
单级火箭所能提供的速度增量与火箭结构比、载荷比存在如下关系:
Δv=-Ispg0ln[ε-λ(ε-1)]
(1)
式中:ε为结构比;λ为有效载荷比;Isp为推进剂真空比冲;g0为海平面重力加速度。考虑液氢液氧(Isp=450 s)、液氧甲烷(Isp=360 s)、液氧煤油(Isp=350 s)、MMH/N2O4(Isp=330 s)等4种推进剂组合,分析表明当载荷比小于16%时,在不借助火箭推力进行减速的情况下,单级火箭均可满足地月往返任务的速度增量需求。需要注意的是,使用液氢液氧或液氧甲烷推进剂的火箭由于燃料低温存储的限制,其结构比一般高于0.1。地球低轨道以远的自由空间飞行、单级可重复使用运输系统以及借助大气减速的可重复使用技术应成为未来发展重点。
1.2 借助大气减速的地月转移飞行器可重复使用
在经济可持续的地月空间运输体系中,地月转移飞行器主要负责地月空间站之间的往返转移任务。在近月端,地月转移飞行器可以依靠自身携带推进剂减速变轨停靠在月球轨道空间站上,所需的速度增量约为1 km/s。在近地端,由于地月转移飞行器返回近地轨道时的速度约为11.2 km/s,利用飞行器自身携带的推进剂主动减速变轨停靠在LEO空间站所需的速度增量约为3.3 km/s,考虑到飞行器减速变轨的推进剂是从近地轨道出发时携带的,这些推进剂还需要跟随地月转移飞行器执行地月转移、近月制动、月地转移等飞行任务,因此,从LEO出发时所需额外增加的推进剂质量规模将是难以承受的。俄罗斯能源火箭航天公司首次提出并分析了地月转移飞行器经大气减速后停靠在国际空间站上,再经过推进剂补加重复使用的方案[7]。考虑到如果地月转移飞行器大气减速过程中气动力热载荷带来的烧蚀和过载效应过于剧烈,飞行器在轨检测维护并继续执行后续载人任务的安全可靠性将大打折扣,那么重复使用方案也将不具备工程可实现性,因此文献[7]提出的大气减速次数为3次。但是文献[7]中仅考虑了地月转移飞行器地球再入倾角和速度等轨道参数,没有考虑地月转移飞行器质量、升阻力系数、特征面积等设计参数以及再入倾侧角控制量、控制时间等控制参数,实际上可以通过对飞行器再入轨道参数、飞行器设计参数和控制参数的联合优化,在可承受的气动载荷损耗下进一步减少大气减速次数。为此,作者团队开展了考虑地月转移飞行器地球再入轨道参数、飞行器设计参数以及再入气动力热参数等约束条件下的大气减速方案优化工作[8]。将地月转移飞行器大气减速过程和停靠过程划分为飞行器再入大气层至跃出大气层的再入飞行段和飞行器跃出大气层后变轨至LEO空间站停泊轨道的机动飞行段,如图3所示。
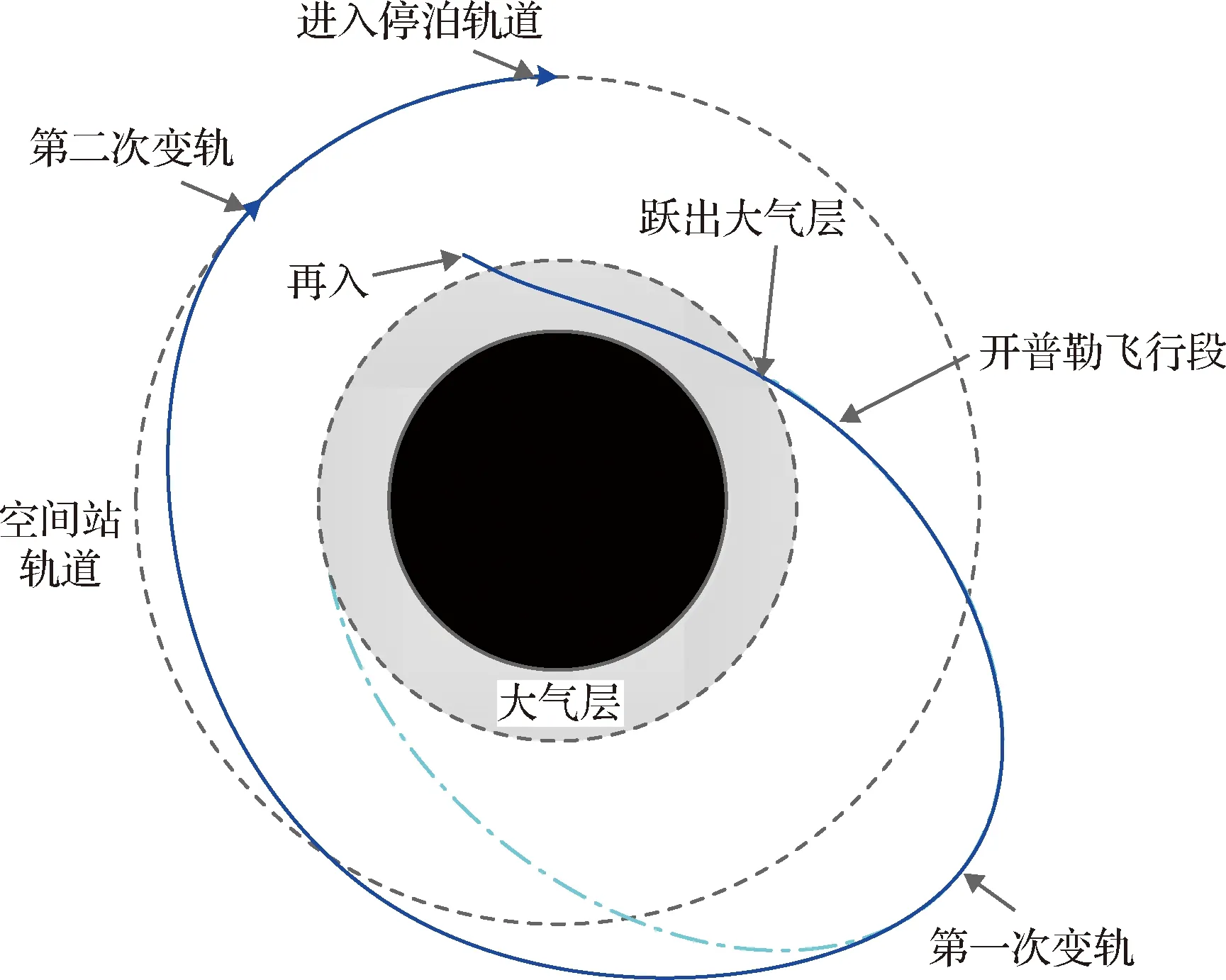
图3 地月转移飞行器大气减速与变轨机动过程Fig.3 Atmospheric deceleration and trajectory maneuver process of cislunar transfer vehicle
定义地月转移飞行器跃出大气层时的轨道为出射轨道,第一次变轨后轨道为过渡轨道,第二次变轨后进入的空间站停泊轨道为目标轨道。地月转移飞行器从出射轨道变轨机动到目标轨道所需的速度增量定义为停泊速度增量,它包括两次变轨所需的速度增量,第一次用于抬升出射轨道的近地点高度,第二次用于降低过渡轨道的远地点高度。定义出射轨道的长半轴和短半轴为a,b,过渡轨道长半轴为aΦ, 远地点地心距离和速度为ra,va,空间站的地心距离为rs,可得到第一次和第二次变轨所需的速度增量分别为
(2)
(3)
以地月转移飞行器停泊速度增量为优化目标,通过设定地月转移飞行器升力系数、阻力系数、质量、特征面积等设计参数,再入速度和倾角等轨道参数,再入倾侧角控制量和控制时间等控制参数的取值区间,定义满足后续重复使用需求的大气再入最大动压、过载和热流密度等约束条件边界值,采用改进粒子群优化算法优化得到地月转移飞行器经过一次大气减速后变轨停靠在LEO空间站所需的最小停泊速度增量为95.96 m/s,实现了以较小的速度增量、较少的大气减速次数和可接受的大气再入气动载荷损耗使地月转移飞行器停靠在LEO空间站上,为后续在轨检测维护、推进剂补加后重复使用奠定基础[9]。
1.3 地月空间站间的轨道转移
以地月空间站为空间港的可重复使用地月空间运输体系中,地月载人、货运飞船往返于LEO空间站和月球轨道空间站之间,分别实现航天员与补给货物的运输。地月空间站作为在轨服务设施,则为空间飞行器提供在轨维修、在轨加注等服务,并为航天员提供长期驻留空间。
该体系中,地月空间站间的轨道转移可分为两类,一类是用于地月载人飞船的脉冲式转移,往返于LEO空间站与LLO或月球轨道空间站之间;另一类是用于地月货运飞船往返的小推力转移。地月载人飞船的往返转移在近地端和近月端受到空间站轨道面的约束[10]。近地端的轨道面约束主要表现为对任务窗口的影响。分析表明,仅当空间站轨道面与月球白道面的交线同月球位置矢量夹角介于40°~50°之间时,转移时间为3~4 d[11],可满足飞船环控生保系统要求。以LLO为例,近月端的轨道面约束主要表现为对转移速度增量的影响。一般而言,从LEO空间站出发可到达任意倾角的LLO,然而为满足月球轨道空间站轨道面约束,一般需3次近月脉冲控制,以实现对轨道面的调整。
下面以地月载人飞船往返中国空间站和LLO为例,对2025年、2034年的任务窗口和转移速度增量进行分析。结果表明,这两年均有39个地月/月地转移任务窗口。表2给出了任务窗口统计值。可知,2025年的地月、月地转移窗口平均大小分别为1.61 d和0.67 d。2034年的地月、月地转移窗口平均大小分别为1.58 d和0.66 d。

表2 任务窗口统计值Table 2 Statistics of mission windows
图4给出了2025年中国空间站支持下地月、月地转移所需速度增量及转移时间。分析可知,在同一任务窗口中,实现地月转移所需的速度增量介于3.845~4.250 km/s之间,对应的转移时间介于2.5 d~4.7 d之间;实现月地转移所需的速度增量介于0.760~1.100 km/s之间,对应的转移时间则介于2.5 d~4.7 d之间。
图4 中国空间站支持下地月往返转移速度增量及转移时间Fig.4 The speed increment and transfer time of Earth-Moon-Earth transfer supported by Chinese Space Station
对于地月载人飞船往返于地月空间站的情形,其任务窗口的分析结果同表2一致,转移速度增量则包括近月三脉冲。以地月转移为例,第一次脉冲用于将环绕月球的双曲线轨道变为大椭圆轨道;第二次脉冲发生在椭圆轨道的远月点,用于实现轨道面的变化;第三次脉冲发生在变轨后大椭圆轨道的近月点,用于实现轨道的圆化。经分析,地月直接转移到达月球轨道空间站的近月三脉冲速度增量最小为0.858 7 km/s,最大为1.670 1 km/s。
与地月载人飞行任务不同,地月货运任务不受转移时间约束,且要求具有较高的载荷比,因此地月货运飞船可采用比冲高达几千甚至上万的电推进或核推进系统,以降低飞行器的燃耗比。然而,电推进或核推进系统可以提供的推力较小(mN级~N级),无法施加脉冲形式的瞬间近月制动以实现月球捕获。因此,在小推力推进系统的作用下,如何保证地月货运飞船的月球捕获从而进一步实现地月转移是工程实施所面临的现实难题。作者团队基于常微分方程解的参数连续性理论,提出并证明了月球捕获集定理,可保证地月转移飞行器被月球捕获[12]。
1.4 空间站与载人月球探测一体化
自1992年中国实施载人航天工程以来,经过30多年的发展形成了成熟的天地往返和常态化在轨驻留能力,这完全可以而且也有必要成为载人月球探测任务依托的基点,从而使载人月球探测任务站在更高的技术起点上,避免重复的技术研发和经费投入。“后空间站”时代的载人月球探测应充分利用人类在天地往返和在轨驻留方面形成的技术基础,而不是捡起阿波罗时代直接奔月的技术模式。从历史经验来看,世界上还没有一个航天强国有能力同时实施空间站建设运营和载人月球探测两项巨型航天计划。对于中国载人航天来说,需要在建造和运营空间站的同时推进载人月球探测,这既是巨大的技术经济挑战,也是走出载人月球探测中国道路的难得机遇。将空间站建设与载人月球探测进行一体化筹划与设计,充分利用空间站建设所形成的天地往返运输能力,以空间站作为载人月球探测的天基港口,使空间站建设运营成为载人月球探测的一个有机组成部分,如图5所示。从工程技术的角度看,一方面载人月球探测任务需求将持续推动空间站建设和发展,使空间站发挥更大的效益;另一方面,载人月球探测任务可以将更多的人力、物力投入到地月转移、月面升降、月面建设等方面的技术创新和工程实践上。
2 地月空间的资源利用与基础设施建设
地月空间为人类创新发展提供了新兴资源及广阔的空间,其开发利用一方面扩大了人类开展太空探索、科学研究以及生产活动的边界,另一方面可以释放地球资源及生态环境压力。当前,人类尚处于地月空间建设初期,资源获取及基础设施建设是首需解决的问题。月球和近地小天体提供了地月空间建设与太空探索的物质基础,如图6所示。地月空间活动离不开太空基础设施的支持,如地月空间工业园区、月面运输系统、地月空间导航系统等。地球静止轨道处于地月引力阱的阱口,可以建造轨道环、太阳能电站等;月球空间独特的环境条件为太空电梯、磁悬浮、天钩等电气化运输提供了便利;地月空间导航系统需要提供整个地月空间的导航、定位与授时服务。地月空间存在丰富的轨道类型,如图7所示,包括地月转移轨道、地月驻留轨道以及地球静止轨道等,为地月空间资源利用和基础设施建设任务提供了基本科学依据。
图6 地月空间资源与利用Fig.6 Cislunar space resources and utilization
2.1 月球与近地小天体的资源开采与利用
将物质从月球、近地小天体表面运输到地球静止轨道工业园区所需的能量大大低于将其从地球发射所需要的能量。月球、近地小天体资源的大规模开采与利用,是未来地月空间发展必不可少的环节。如何突破空间环境极端恶劣和人力资源极度稀缺的限制,实现月球与近地小天体资源的工业化开采与利用,是地月空间可持续发展的关键问题。当前对月球和近地小天体资源的认识主要还是基于遥感获得的表面性质、特征以及对采样返回样品的成分分析,还需要积极推动对月球和近地小天体的有人和无人探索,不断深化对月球和近地小天体的科学认识,以增强地月空间的建设能力[13]。
2.1.1月球资源的开采与利用
全球主要的航天研究机构、工业部门在开展与月球资源相关的原位提取及其利用技术研究,重点是获取用于维持生命的水、氧气以及推进剂、金属元素等。普遍认为月球两极永久性阴影区存在水冰[14-15]。它将是月球维持生命的重要本地氧气和饮用水来源,还能支持太空居住的日常生活用水和更长远的太空农业用水。两极水冰的提取需要加热表岩屑直到挥发物蒸发,然后捕获释放出的气体。来源于水的氧气和氢气可以用作火箭氧化剂/燃料,有助于降低运输成本。从表岩屑中提取氧气的方法可以分为三类:活性气体还原、电解还原和气相热解[16]。
表岩屑富含氧、硅以及铝、镁、钛等航空航天常用金属,以及一定浓度的氦-3。月球的部分区域富含稀土和钾磷元素(KREEP)以及核燃料元素钍和铀。基于这些金属和非金属元素,可以为地月空间建设提供更复杂的产品,例如钛和铝合金建筑材料、硅基太阳能电池以及核推进系统的燃料铀[5]。实际上,利用月球表岩屑提取氧气时产生的副产品往往是金属。氟化法提供了提取高纯度金属氟化物的可能性,因此会产生诸如用于太阳能电池的硅以及用于建筑的铝、铁和钛金属等副产品。钛和铝是航空航天领域应用的重要金属。在未来的太空经济发展中,月球可能成为地月空间中钛和铝的首选来源。理论上,气相热解可仅使用月球上的太阳光、真空和任何形式的表岩屑来提取金属元素。在真空和足够高的温度下,将金属氧化物蒸发并分解成低价氧化物、金属和氧气,进而立即凝结蒸发后的气态金属。
2.1.2近地小天体的资源开采与利用
小天体是指太阳系中质量比行星质量小得多的天体,包括小行星、彗星和流星。通常,近地小天体的近日点小于等于1.3 AU。近地小天体的到达能量介于登月和火星探测之间,探测代价可承受,技术风险可控。开展小天体资源勘探可以弥补地球资源的短缺、占据高技术工业的优势地位,以及支持空间站、月球基地等空间设施的建设,并开拓更为广阔的太空经济圈。
图8汇总了近地小天体的资源概况及主要应用。与月球资源类似,小天体采矿可分为金属采矿、水资源利用、生物资源采集等。人类已经在近地M型小行星中识别出了金和铂族金属元素。C型小行星富含大量挥发性物质,包括水、氢和氧等,具有重要的科学研究意义,同时可以作为人类空间探测的补给能源。S型小行星的主要成分是硅酸盐,可作为太空建造和防护的主要原材料。由于近地小天体的引力较月球小,铁、镍和铂族金属(PGM)等稀有金属的地外来源更可能是近地小天体而不是月球,对其进行采矿与资源利用将产生巨大的经济效应。
小天体采矿的关键是建立可重复、可持续的采矿体系,从而创造相比于地球采矿更高的经济价值。通常将小天体样本捕获至地-月系统或者地-日系统内的周期性稳定轨道上,以便多次开采和研究。以小行星重定向任务为例,方案分四步:1) 根据探测器能提供的最大功率、任务时间、接近地球时刻、小行星结构成分类型及整个捕获过程所需速度增量等约束条件,确定捕获目标和捕获质量;2) 探测器从地面发射到近地轨道,在探测器自带电推进器的作用下,将探测器轨道远地点缓慢提高到月球高度,并在月球引力辅助下进入地球逃逸轨道,随后在电推进作用下奔向目标小行星;3) 探测器接近目标小行星之后,开展小行星近距离探测,获取高精度自旋状态和详细的形状尺寸,之后进行消旋机动捕获;4) 电推进器将捕获体推到地月系统,通过月球引力辅助将小行星捕获到远距离逆行轨道,等待探测器开展着陆探测。
图8 小天体的资源及其主要应用Fig.8 Resources of small celestial bodies and their main applications
2.2 地球静止轨道上的基础设施
从太空运输能量消耗的角度看,在地球静止轨道上建立太阳能电站、轨道环等基础设施具有天然优势。
2.2.1空间太阳能电站
空间太阳能电站将太阳能收集、转换为电能,并通过微波、激光等无线能量传输形式将能量传向地面或空间应用系统,最后转换为电能。它包括3部分,分别是空间太阳能发电装置、能量转换与传输装置、地面接收与转换装置。空间太阳能电站不受季节、昼夜变化的影响,可以连续工作,将其部署到地球静止轨道上,约99%的时间都可以稳定地接收太阳辐射,且能量密度高,约为地面平均光照功率的7~12倍。
1968年,美国科学家彼得·格拉赛博士最早提出空间太阳能电站的概念。自20世纪70年代以来,多个国家开展了空间太阳能电站研究,到目前为止提出了20多种概念构想,并在空间大型展开机构、无线能量传输、空间能量存储、地面能量分布与管理等方面开展了技术研究。典型空间太阳能电站概念包括1979 SPS基准系统、太阳帆塔方案、分布式绳系方案、集成对称聚光系统、任意相控阵空间太阳能电站、激光太阳能电站等。
与传统航天器相比,空间太阳能电站具有质量大、面积大、功率大的特点,在工程应用与发展中需要解决如下问题:
1)通过提高聚光效率、光电转换效率等途径降低系统面积、质量与收拢体积,从而便于发射入轨、在轨组装。
2)模块化设计与组装,便于分批次发射、组装,同时降低系统风险,避免流星体、空间碎片等碰撞引起的系统崩溃,可以单独对故障模块进行维修或更换。
3)地球静止轨道保持,空间太阳能电站位于静止轨道上,在具有充足光照条件的情况下,还可以保持与地面、太阳的固定指向关系,便于接收光照并将电能传输到地面。在地球静止轨道上,空间太阳能电站会受到非球形引力、太阳光压、三体引力等摄动力作用,需要开展太阳能电站静止轨道保持控制。
4)解决电能在轨储存、无线能量传输、地面能量接收等问题。由于太阳能电站处于4 K的宇宙背景辐射环境中,温度极低,可以考虑采用超导储能方法来保存产生的电能,降低电能损耗;为便于将电能传输到地面或空间其他任务系统,需要采用微波或激光的方式进行无线能量传输;在地面上建立能量接收与转换装置,接收来自太空的微波或激光,将其转换为电能,输入到地面电网系统。
5)解决大型空间太阳能电站系统的在轨建造与维护问题。空间太阳能电站是一个非常庞大的系统,无论是从地面发射入轨,还是利用月球、小行星资源进行在轨制造,都需要分批次在轨建造、组装及维护。
2.2.2地球静止轨道环系统
地球静止轨道环系统是一种环绕地球的、在物理上连续存在的太空系统,可用于空间开发、人类居住、地面气候调节等用途。鉴于地球静止轨道上丰富的太阳能资源,及其与月球、近地小天体往返的便利性,在地球静止轨道上建设轨道环系统具有重要应用价值[5]。
1)提高地球静止轨道的空间利用率。当地球静止轨道环系统建成后,可以将原有的静止轨道卫星载荷集成在环上,将轨道环作为原有静止轨道卫星的公共平台。在工程实现上,假设将静止轨道环上两个卫星载荷的间隔缩小到100 m,可将轨道空间利用率提高约1 500倍。
2)作为空间太阳能的利用平台。采用太阳能电池板遍布直径2 km的地球静止轨道环的外表面,假设其中一半处于太阳光直射状态,年发电量能达到6 000万亿度,约为2017年全球发电量的231倍。不仅可有效支持自身运行所需要的能量,也是解决未来地球能源问题的重要途径。
3)作为太空人工生态系统的发展空间。利用地球静止轨道环部分舱段进行动植物养殖、空气/水循环利用、食品加工、废弃物回收等,建立完整的人工生态系统,能满足人类大规模迁移居住及空间活动需求,可作为人类从地球空间走向地月空间、宇宙空间的中转驿站。假如地球出现全球性灾难事件,静止轨道环系统也可以作为人类的“庇护所”。
2.3 月球空间的基础设施
月球作为人类未来走向深空的“跳板”,包含许多可以被开发利用的水资源和金属矿藏。大规模、高频次、远距离的月球空间运输将随着月球资源勘探和开采,呈现出爆炸式的增长趋势。以化学推进为主要方式的月面升降、运输手段将难以满足未来月球工业化阶段的运输需求。月球空间具有真空、低重力、低温等环境特征,磁悬浮推进、太空电梯、天钩等电气化运输手段完全具备实现条件,具有可重复使用性强、任务周期短、运营成本低等优势,是替代化学推进的重要方式。
2.3.1月面磁悬浮运输系统
在1986年举行的第一届月球开发研讨会上,NASA的杜克博士提出了在月球上建设磁悬浮运输系统的构想,认为“磁悬浮可能是在月球表面或隧道中发展运输系统的最佳选择”。柏林工业大学的阿佩尔对磁悬浮列车、电动月球车、月面飞行器和电磁质量加速器等月面运输系统的成本效益进行了对比研究。经分析,在月面建造相同运输规模的磁悬浮轨道系统所需的建造质量可以减少至地面系统质量的1/2,甚至1/4。在铝、铁等原位资源可用的前提下,月面磁悬浮列车系统在长期(60年以上)、大规模运输应用中具有优势[17]。NASA的创新先进概念(NIAC)计划在2021年资助了一项新概念月球磁悬浮运输系统项目,提出采用无动力磁性机器人和3层柔性薄膜轨道来构建月球磁悬浮运输系统。石墨层使磁性机器人被动地漂浮在轨道上;柔性电路层产生电磁推力,可控地推动机器人沿着轨道前进;薄膜太阳能电池板层用于在阳光下发电。柔性轨道可以直接展开到月球风化层上,避免了在月面的现场施工,并且可以按需卷起再重新配置,以满足不断发展的月球基地任务要求。
月面特殊的真空、低重力和低温环境使得磁悬浮技术具有很大的应用优势。在月球真空环境下,磁悬浮运输系统可以避免空气阻力带来的速度损耗,不存在气动热和音障等困难,从而实现对运输载体的快速加速。在月球低重力条件下,运输载体所需的悬浮力相对地球上小得多,用于悬浮保持和导向控制的能耗很低。利用月面低温条件,还可以大大减小超导材料的保温难度和能耗。
相对于化学推进和月球车运输而言,月面磁悬浮运输具有较多优点:1)月面磁悬浮运输的应用方式具有多样性,运输载体既可在到达额定速度后只依靠悬浮力匀速运动,还可以以一定角度和速度射向空中,实现弹道式飞行、月面运输与发射的一体化,亦可再利用磁悬浮轨道进行捕获和减速,从而实现月表的远距离跳跃式机动、月球轨道与月球表面的可重复使用往返运输;2)月面磁悬浮运输不需要排出物质,避免了对月球真空环境的污染,同时也避免了激起月尘对月面设施的污染;3)轨道运输器在固定加速管道内或线缆悬空条件下运动,避免了在陨石坑、高山、峡谷等复杂地形下的障碍物规避和导航难题。同时,月面磁悬浮运输系统单次加速任务周期短、发射效率高,适用于大规模、高频次的运输,能够大幅缩减成本。
综上分析,将磁悬浮技术用于未来月球表面轨道运输的优势明显,能在提高月面运输效率、降低建设运营成本方面带来非常可观的效益。
2.3.2月球太空电梯
太空电梯的概念最早由康斯坦丁·齐奥尔科夫斯基在1895年提出,由赤道上的基座、轨道上的太空站、连接基座与太空站的缆绳以及在缆绳上升降的电梯舱组成[5]。太空电梯以相同的角速度跟随地球自转,缆绳在重力和离心力的共同作用下绷紧,从地面上看就像固定在太空中不动一样。电梯舱可以利用太阳能或激光在地面和太空站之间运输人员和货物,还可以利用电梯塔的旋转能量在轨道上发射宇宙飞船,让它们到达其他星球。
太空电梯缆绳需要承受巨大的拉应力,对材料拉伸强度提出了很高要求。由于月球重力仅为地球的1/6,且没有大气层,在月球建造太空电梯的难度要小很多。据研究,月球太空电梯的应力要求约为地球太空电梯的1%,较为经济、成熟的高强度复合纤维材料就能满足要求[18]。美国在1977年提出了月球太空电梯设想[19]。2005年,Pearson等[20]在NASA资助下设计了用于月球空间开发的综合月球运输系统方案。该系统包括一个绕拉格朗日平动点L1并向下延伸至月球赤道的月球太空电梯,一个使用与LSE相同复合材料缆带延伸至月球南极的月面高架缆车,以及利用太阳能沿运输系统移动且能高效储能以在月夜运行的运输机器人。其中,月球太空电梯的一个可行方案需要长达2×105km、质量约8×105kg的M5高强度复合纤维缆带以及缆带顶端质量约4×105kg的配重。可以利用该系统将月球极地的冰最终运输到地球高轨上。相反方向的流动则可以将补给品从地球轨道运送到月球基地和极地采矿站。由前NASA太空电梯项目工程师组建的LiftPort Group公司,也在2012年宣布了建设月球太空电梯的计划,认为利用现有技术能够成功建造月球太空电梯。该公司曾在2006年利用大型气球成功进行了太空电梯的早期概念测试。
虽然月球太空电梯体量巨大,需要一个相对长的建设周期才能够投入使用,但是在月球特殊的真空、低重力环境下,它的建设和维护难度不仅远小于地球太空电梯,使用寿命也明显更长,可在大规模月球开发阶段持续产生可观的经济效益。
2.3.3月球天钩
1977年,美国科学家Moravec[21]提出可以建造一条绕月球旋转、周期性降落在月球表面的绳索来进行有效载荷运输,称为天钩。它由一个中心设备和两条长度等于该中心设备轨道高度的系绳臂组成,以与其轨道相同的方向旋转,使系绳尖端以零相对速度周期性地落在月面上。Moravec发现,当系绳臂长等于月球直径1/19时,系绳质量最小。然而,使用Moravec的极小值解,不仅需要系绳的总长达到1160 km,还使从地球注入的有效载荷需要有约2.9 km/s的环月速度,才能与系绳顶端的旋转速度匹配。为改进Moravec方案,美国Tethers Unlimited公司设计了一种名为Lunavator的系绳系统[22]。它由利用电动力在系绳上移动的中心设备、可卷进卷出的系绳和平衡质量组成。通过调整系绳长度、移动中心设备在系绳上的位置等措施,既大幅缩短了系绳长度,又降低了捕获地球注入有效载荷的难度。
天钩在本质上是一个轨道能量储存交换器。同时,和月面磁悬浮运输、月球太空电梯相比,由于月球天钩系统规模较小,组成相对简单,其工程实现难度也更低。因此,在进行大规模月球开发的早期阶段,应用月球天钩进行月面升降运输是更经济可行的。
2.4 地月空间导航系统
人类开发地月空间离不开导航定位的支持。目前,环绕地球运行的GPS、GLONASS、伽利略、北斗等导航系统为地球空间提供了良好的导航服务,可以满足地面以及绕地球运行飞行器的导航定位需求。但是这些系统靠近地球,无法满足地月空间范围内的导航定位需求,迫切需要发展面向地月转移空间和月球空间的导航系统。
为支持地月转移空间、地月L1/L2点附近的飞行器导航,实现月面任务的高精度定位,地月空间导航卫星星座需具有良好的空间分布特性和长期稳定的轨道特性。地月空间导航星座可能部署的轨道类型主要包括:拉格朗日点附近的稳定轨道、远距离逆行轨道、近直线晕轨道和环月圆轨道。
对于月球表面和月球附近的导航定位需求而言,环月圆轨道是导航卫星部署的较优选项。文献[23]研究发现,由月球轨道上11颗卫星组成的导航星座联合当前的全球导航卫星系统,足以满足月球表面和月球附近的任务需求。而对于地月转移空间的导航定位需求,部署在拉格朗日点附近稳定轨道、远距离逆行轨道和近直线晕轨道上的导航系统则具有更好的表现。有研究表明,在L1、L2、L4和L5附近的轨道上放置4颗卫星,可以为地月转移轨道上的卫星提供几十米精度的导航定位服务[24]。据分析,在远距离逆行轨道、近直线晕轨道上等间隔部署6颗导航卫星,当导航卫星星历误差降低到10 m以内时,其对地月转移空间的导航精度可以达到100 m左右。
3 月面机器人
月球建设面临环境极其严酷、人力资源极端稀缺的困难,迫切需要月面机器人的参与,以代替或辅助航天员完成建设任务;同时,大规模、多样化、无人化的月面任务也为人工智能和机器人发展创造了源源不断的应用需求和广阔的发挥空间。月面机器人将成为月球建设、月面服务和月球资源利用的先遣、主导力量[25]。在航天员抵达月球之前,利用机器人进行必要的月面设施准备与搭建,可以大幅度提高人类登陆月球的可靠性与安全性;进行月面探测时,利用机器人对航天员进行辅助,可以大大提高载人月球探测的范围和效率;驻留月球期间,利用机器人进行月面设施的运行维护与舱外作业,可以降低航天员舱外工作频次,提高工作效率和安全性。月面机器人为实现人类在月面的长期驻留[26]、月面资源开发利用[27]和月球基地建造[28]提供了必不可少的能力支撑。
3.1 月面设施准备与维护机器人
月球资源开发、基地建造等依赖于月面基础设施的支持,如月面居住舱、月面运输系统、月面能源站、通信/供电线缆等。在月面基础设施建造过程中,需要开展场地勘探与选址、场地平整、月表岩屑挖掘/筛选/运输等任务。考虑到高昂的地月往返运输成本、月面环境下的航天员身体健康和工作能力限制等因素,在现有的技术条件下,很难派遣大量航天员开展这些工作。利用多种不同功能的机器人,并吸收先进的智能控制和集群控制技术开展月面建设将成为必然选择。
对于月面基础设施准备与维护任务,有必要结合月面工作环境和任务约束,有针对性地开展机器人结构设计。例如,针对月面居住舱建造之前的场地平整任务,可以在现有月球车的基础上加装铲斗等部件来完成[29]。针对砾石分布较多、轮式机器人难以应用的资源勘探场景,可以使用蛇形机器人[30],以更好地深入到砾石间的缝隙中执行任务;或将其与月球车进行组合,当月球车沉陷在松散的砾石中时,利用蛇形机器人拖拽使其摆脱沉陷困境,增强月球车对复杂月面环境的适应能力。针对模块化舱段组装的月面居住舱建造任务,可以将舱段本身设计为自主移动机器人,或者采用重载机器人进行吊装或协同搬运[31]。针对月球基地大型结构建造任务,可以采用机器人集群进行桁架、砖块等建筑材料的协同搬运与组装。
月面建设与运营任务的实现依赖于结构和功能异构的多机器人协作。NASA通过月面机器人操作方案研究指出,从第一次月面着陆开始,月面建设和运营的相关任务都没有超过现有机器人的能力范围;并提出了基于移动龙门式操作机器人、载人月球车和选矿挖掘机器人的初级月球基地建设构想[32]。加拿大多伦多大学提出了12种基于模块化运输平台和作业工具的月面作业机器人配置方案,每种模块分别执行抬升、运输、挖掘等特定功能。
受生物集群行为启发的群体机器人以及集群控制技术,在月面设施准备与维护任务中具有广阔的应用前景。集群机器人能够较好地适应非结构化环境,克服单点失效的问题,并以自治的方式实现作业目标,其优势包括:
1) 机器人集群运动方式灵活多样,能够更好地满足月面复杂环境约束下的机动需要;
2) 机器人集群具有系统冗余性和高可靠性,对月面建设中的复杂未知工况具有较高的适应性;
3) 机器人集群的分布式特性能够增加作业空间范围和作业形式,加速大规模、多样化的月面建设任务;
4) 机器人集群自主进行月面建设任务时几乎不需要依赖现场或遥操控人员的参与。
多伦多大学将人工神经组织(ANT)算法用于月面机器人集群作业的自主控制[33],并开展了月面集群挖掘任务的仿真和物理实验。研究表明,集群配置方案能够显著降低对运载火箭发射次数的要求,减少约50%的发射成本;同时,由于不需要在调整机器人叶片、铲斗等方面花费额外时间,有效压缩了非工作时间,提高了任务执行效率。该团队还提出了用于月面熔岩洞探测的具有飞行、跳跃和翻滚能力的Pit-Bot球形机器人集群,以及用于在月面、火星等陡峭地形环境中攀爬探测的SphereX球形机器人集群等[34]。
3.2 航天员伴随与辅助机器人
3.2.1月面航天员伴随与辅助机器人的作用
月面的高真空、强辐射、剧烈温差以及漂浮月尘等因素给航天员带来巨大的健康风险。航天员执行舱外任务时需穿着宇航服,行走、携带和操作装备的能力有限。利用辅助机器人充当航天员的跟随助手,开展拍摄记录、抵近观察、携带工具、采样作业等辅助航天员的工作,可以较大程度地解放月面人力资源,提高航天员出舱活动的效率。以航天员和月面辅助机器人为主体的人机联合探测是未来载人月球探测的重要发展趋势。
月面航天员辅助机器人的自主性和智能性是提高人机联合探测效率的关键。2000年前后,NASA约翰逊航天中心组织开展了机器人辅助探测与作业的地面模拟试验[35],以探索更安全、更高效的人机协作方式。在该试验中,研究人员基于Marsokhod遥操作机器人开展了多任务场景下的航天员辅助测试。但遥操作控制模式难以满足Marsokhod在地面重力条件下对航天员行走速度的及时响应需求,出现了航天员需停留等待机器人的情况。随后,NASA的D-RATS(The Desert Research and Technology Studies)项目开展了基于Boudreaux机器人的人机联合探测模拟试验[36],完成了人机协作的地形探测、电缆部署、柔性太阳能电池板部署等演示试验[37]。作者团队提出了一种月面伴随机器人[38],用于伴随月面航天员出舱探测、抵近观察感兴趣目标、拍摄记录工作场景等任务,具备复杂地形中的灵巧高效机动、障碍物环境下对行走航天员的稳定跟随以及对航天员工作场景跟踪拍摄记录等能力,如图9~10所示。
图9 月面伴随机器人系统组成Fig.9 System overview of the lunar robotic follower

图10 月面伴随机器人原型机性能与功能测试场景Fig.10 Performance and function tests of the lunar robotic follower prototype
3.2.2伴随与辅助机器人的稳定跟随运动控制
月面航天员伴随与辅助机器人的稳定跟随是其提供及时、可持续服务的前提。由于航天员与辅助机器人步态和越障性能的差异,辅助机器人难以跟踪航天员的运动轨迹。月面岩石、松软表面、狭窄通道等障碍路况可能对辅助机器人的稳定跟随运动产生阻碍和干扰。在障碍物环境下,对行走航天员的稳定跟随控制问题可以描述为:
(4)
式中:dk为人机跟随距离;dref为参考跟随距离;K为任务终止时刻的序号;rk为机器人瞬时位置;O为障碍物区域坐标点的集合。
辅助机器人的跟随路径应以航天员的瞬时行走轨迹为参考,在满足障碍物环境约束的条件下,尽可能保持相对稳定的跟随距离。Marsokhod机器人基于远程遥控实现对航天员的跟随,其效率较低;Boudreaux基于双目立体视觉进行航天员检测和定位,然后控制机器人保持在与航天员固定的距离范围上,未考虑机器人避障和跟随行为的协调。为实现前述月面伴随机器人在障碍物环境中对航天员的自主稳定跟随,本文作者团队基于深度强化学习构建了一种如图11所示的“预测-引导”规划方法:首先基于卡尔曼滤波预测航天员的行走轨迹,然后基于深度强化学习对航天员运动预测信息和局部障碍物测量信息进行融合推理,规划出机器人的最优运动行为序列。
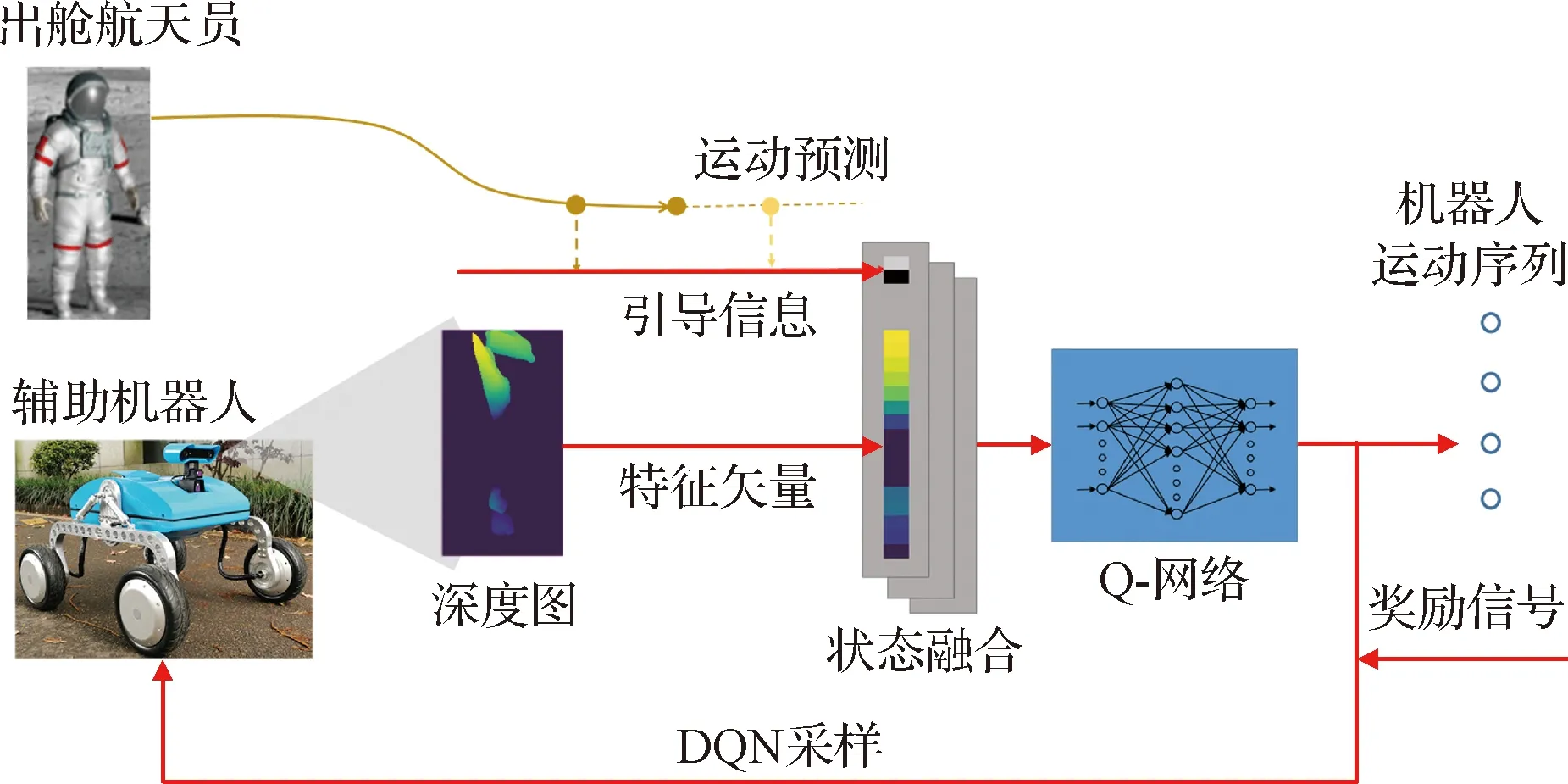
图11 “预测-引导”跟随规划方法Fig.11 The “Predictive-guide” planning architecture for astronaut following
3.3 月球极区太阳同步探测及其路径规划
3.3.1月球极区太阳同步探测
研究表明月球两极地区可能存在丰富的水冰[39]、二氧化碳[40]等资源,因此成为未来月球基地选址、资源开发和利用的首选区域,具有极高的探测价值。将探测机器人部署到极地区域,可以近距离探查水冰等物质的存在性及位置,对月球基地的可能选址进行现场勘察和评估。
月面太阳同步探测通过使太阳能驱动机器人在月面导航并追随阳光运动,可实现持续在光照区域机动和探测[41]。对于月球两极地区来说,由于当地太阳移动速度更慢,因此更易实现太阳同步探测。根据月表晨昏线移动速度估算,要实现围绕月球极点半径5 km范围内的太阳同步环月漫游,需要的机器人平均速度小于0.04 km/h。月面机器人的太阳同步探测对未来月面长时间、连续探测作业具有重要意义: 1)通过太阳同步探测可以避免漫长月夜下的极限低温和黑暗、无能量补给等不利条件,因此是一种潜在的低成本、长时间连续探测形式;2)通过太阳同步探测,可实现机器人始终处于月球昼夜交替过渡区域的适宜温度带,使得机器人只依赖简单热控系统就可以实现在接近地球温度环境下的长期工作,如图12所示。
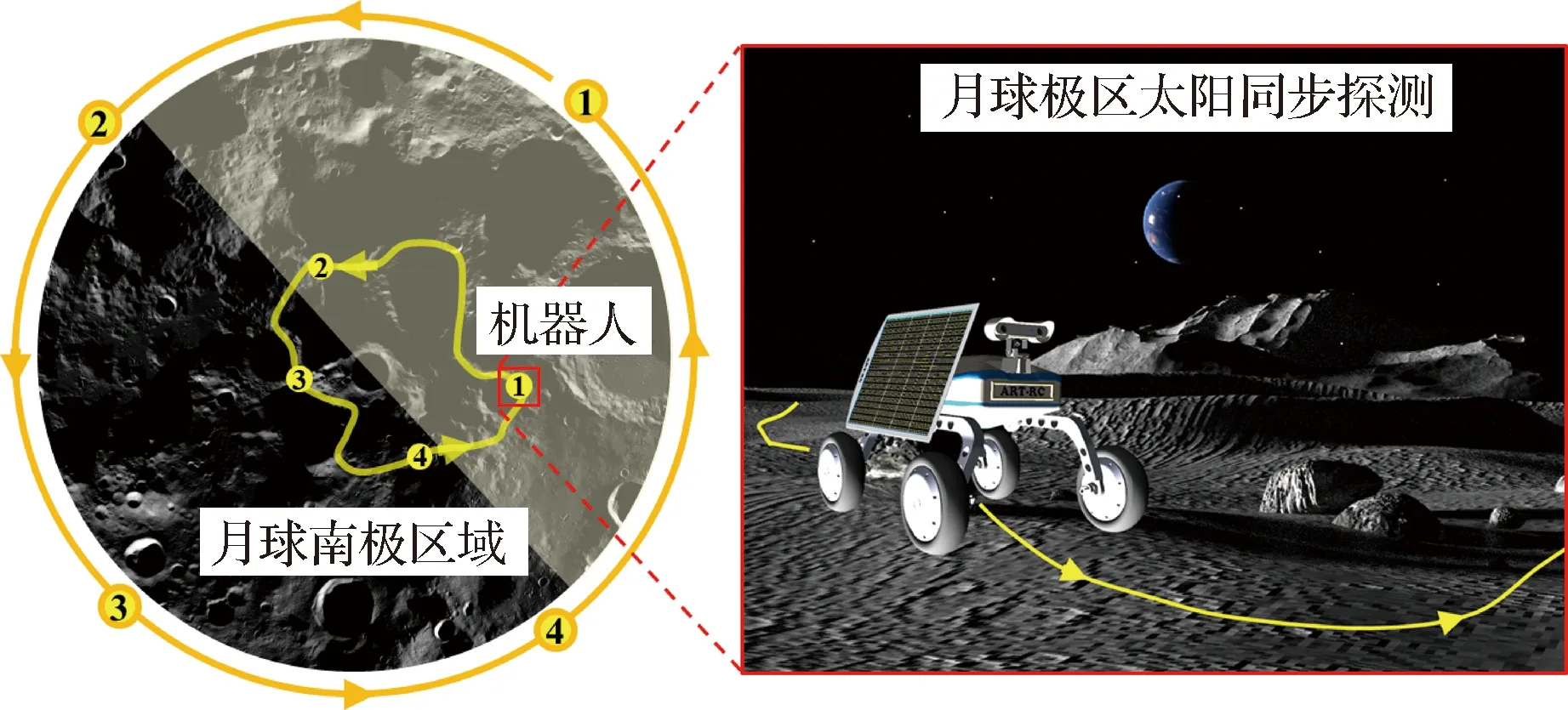
图12 月球南极附近的太阳同步探测概念图Fig.12 Conceptual diagram of solar synchronous roving at the lunar south pole
面向未来月球两极地区长时间、大范围持续探测需求,卡耐基梅隆大学开展了模拟实验,证明了太阳同步探测概念的可行性。2001年,卡耐基梅隆大学在太阳同步导航项目[42]的支持下,研制了Hype-rion太阳同步探测机器人。研究人员携带Hyperion机器人在加拿大德文岛开展了太阳同步的地面模拟试验,Hyperion机器人在以遥操控为主的模式下开展了历时24 h、长达6.1 km的阳光漫游。在实验过程中,机器人的运动有时滞后于太阳,但能够在比较平坦的区域追赶回来[43]。卡耐基-梅隆大学基于Zo⊇机器人在阿塔卡马沙漠内地和海岸地区进行了共计272次生命特征自主探测实验,单次漫游的最长距离达3.3 km[44]。
3.3.2月面太阳同步探测的时空路径规划
太阳同步探测路径规划是实现月面机器人始终运行在地形平坦的光照区的关键[45]。太阳同步探测路径规划是指综合考虑月面地形、大范围动态时变的光照以及机器人自身的运动能力和电源水平等约束,求解出一条从初始位置和时刻出发,到达目标位置和时刻的可行或最优路径。
高精度月球地形图的制备为机器人月面机动约束建模和路径规划方法的研究提供了条件。中国近期发布了基于嫦娥二号任务数据绘制的高精度全月地图集CE2Tmap2015,其数字高程模型(DEM)的全月分辨率最高达7 m[46]。通常,月面远距离路径规划主要包含可计算图构建和路径搜索两个阶段。首先,基于月面DEM数据进行地形、光照等路径约束计算,并统一反映到栅格图或维诺图上[47];然后,考虑路径安全性、平滑性等指标,利用A*、Dijkstra等搜索算法在可计算图上进行最优路径的规划[48]。作者团队基于月面地形起伏、粗糙度、坡度和光照条件分析构建了二值化可通过性特征地图;并提出一种基于学习的端到端规划方法,相比传统搜索方法在规划速度方面具有明显的优势[49]。该端到端规划模型采用双通道Resnet进行全局和局部特征的提取。然而,现有基于搜索或学习的方法普遍将月面光照条件看作静态约束,因此不足以实现长时间周期的月面太阳同步探测时空路径求解。
对大范围动态时变的光照因素的建模和表示是月面太阳同步探测时空路径规划的基础。由于相对恒定的天体运动规律,月面光照条件的动态性是可以预测且可预先计算的。Otten等[50]将时间也作为节点状态的一个增补维度进行规划,并将地形约束以及时变的光照约束处理成时间序列地图,然后分别基于A*算法和RRT算法讨论了在月球南极附近陨石坑和高地上连续数个月球日获取光照的路径存在性。
月面太阳同步探测路径的综合风险评估和优化对探测任务的顺利开展和机器人的长寿命运行具有重要意义。对月面机器人的太阳同步探测来说,机器人在路径上的速度分布是影响其安全性的主要因素。具体地,机器人应该被允许在平坦的区域以更快的速度行走;而在坡度较陡的区域,以缓慢的速度平稳通过。此外,机器人电池的充放电过程与其运动速度关系密切。机器人不能连续行进,因为这可能导致电量不足;也不能一直原地等待,因为这可能导致其落后于太阳轨迹,并且其能量消耗和机器人的速度大小、爬坡情况都有密切关系。考虑这些问题,作者团队基于A*算法提出了一种变速时空A*算法(MSST-A*),能够在固定时空分辨率的地图上实现机器人速度分布的优化,如图13所示;考虑机器人运动安全性和能量可靠性,提出了月面太阳同步探测路径的最优规划模型,并求解了环绕月球南极沙克尔顿坑的太阳同步巡视路径,如图14所示。结果表明,一个质量55 kg、搭载0.2 m2太阳电池板、具备20°爬坡能力的机器人能够以0.021 m/s的平均速度实现长达3个月球日的月球南极太阳同步环绕探测,全程平均坡度为9.501°[51]。
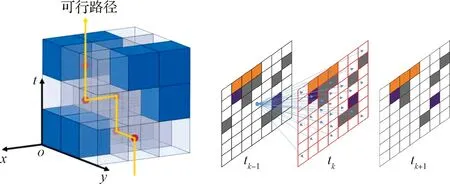
图13 月面时空地图(左)与多级速度拓展机制(右)Fig.13 The lunar spatiotemporal map (left) and a multi-level speed expansion mechanism (right)
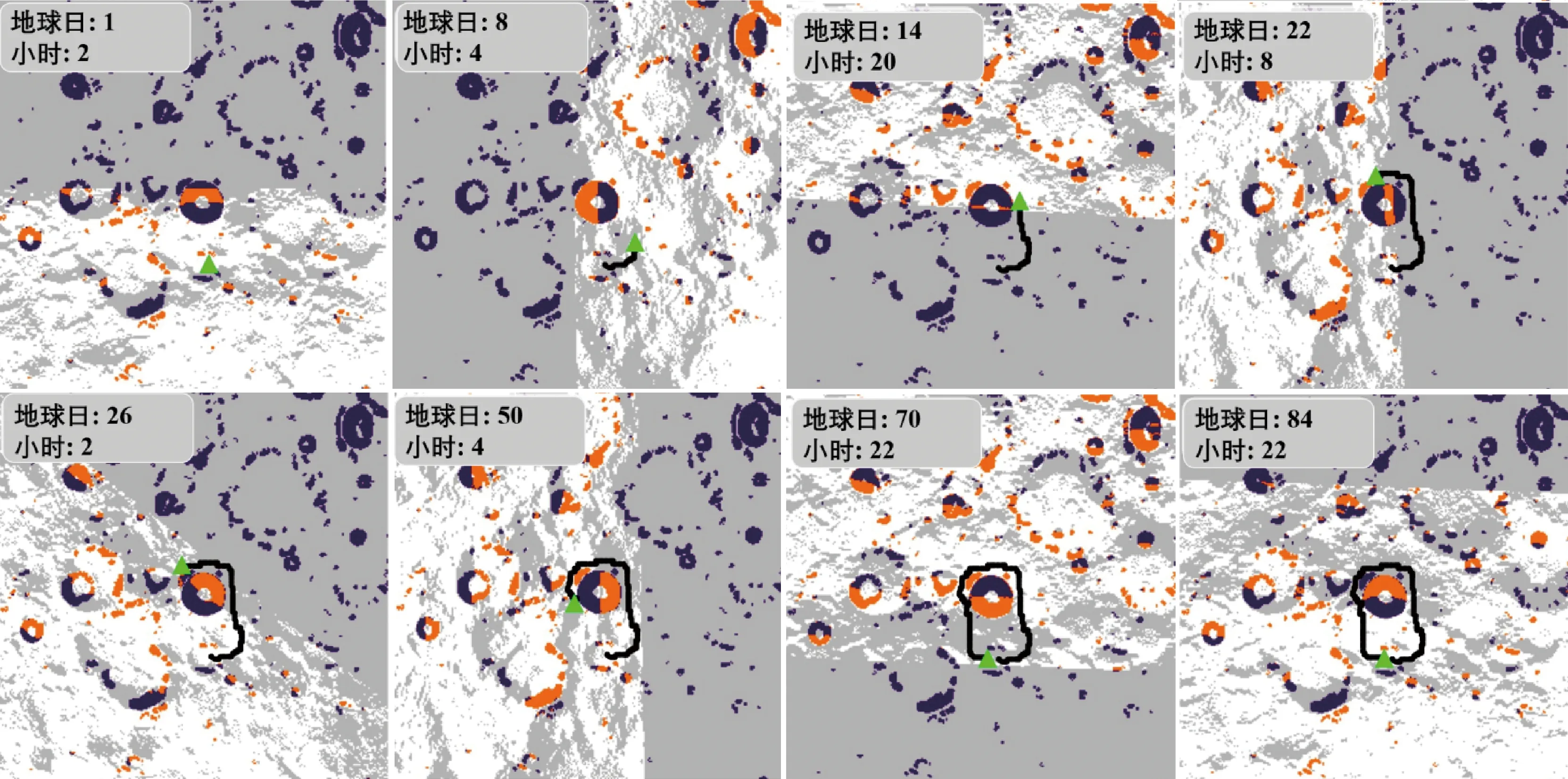
图14 基于MSST-A*的月球南极跨越3个月球日的综合风险最优太阳同步探测环线Fig.14 The integrated-risk-optimal solar synchronous loop circumnavigating the south lunar pole over 3 lunar days by MSST-A*
4 地月空间经济圈的讨论与对策
4.1 发展地月空间经济圈的意义
地月空间经济圈的建设范围涵盖地球空间、地月转移空间和月球空间,需要发展运输产业、基础设施、应用与服务产业等,如图15所示,利用太空中的物质和能源生产产品,为人类社会提供服务。发展地月空间经济圈可以促使国家的利益边界从地面、海洋延伸至地月空间。随着人类在地月空间的永久驻留成为现实,经济活动和国家发展利益将从地面、海洋延伸至地月空间。地月空间活动将与国家的生存发展息息相关,成为国家利益拓展的新边疆。月球和近地小天体蕴含的丰富资源,可以成为地月经济开发与国家利益拓展的物质基础,将减少地月空间发展对地球资源的依赖[52]。以这些物质资源为基础,形成太空工业体系,生产太空产品和服务,将促使人类社会活动和经济生产进入地月空间,从而引领国家利益向地月空间延伸。
发展地月空间经济圈可以推动太空产业布局从围绕地球向围绕地月空间发展。目前,人类绝大多数的航天活动都是围绕地球开展的,分布在近地轨道、中地球轨道和地球静止轨道上。从地月空间的角度看,近地轨道、中地球轨道处于地球引力阱的内部,静止轨道则处于引力阱的阱口,从阱口出发地月空间是辽阔无垠的“引力平原”。这个“引力平原”一端高悬于位于地球表面的巨大消费市场的上空,另一端则连接着月球和近地小天体等资源基地,这样的结构分布将使人类太空产业布局从引力阱内部向外漫延,通过引力平原延伸至月面和近地小行星,从而改变以地球为中心的传统太空产业布局。在地球静止轨道上建设太空工业园区,地月拉格朗日点L1则将成为物流集散中心,L2是理想的地月空间监视点和通信中继点[53],月面将建造大型资源开采与加工中心,而地球则主要是消费区和轻工业区,重工业将搬离地球进入太空。此外,由于月球上的重力只有地球的六分之一并且没有大气,因此从月球上发射深空探测器的成本将大大降低,同时月球上的水冰可以为探测器提供必要的燃料,月球将成为地月空间时代深空探测的前哨站。地月空间发展将改变传统以地球为中心的太空产业布局,使太空产业在整个地月空间得到系统建设。
发展地月空间经济圈还可以拓展人类的生存与发展空间,促使人类社会由地球文明向太阳系文明迈进。人类文明的发展历史始终是一个人口增长与生存空间拓展相互促进的过程。无论是人类从非洲走向各个大陆的原始时代,还是农业文明与工业文明时代,人口的增长和人均财富的增加始终是人类发展的重要标志,人口的增长促使人类不断开拓新的发展空间,而新的发展空间又极大地促进了技术创新和社会生产力的发展。对于地球空间而言,全球和宇宙层面的灾难性事件,如小行星撞击、超级火山、冰河时代等,都可能会导致人类文明的中断。因此,人类文明要在宇宙中永续存在,就必须将人类社会的概念延伸到地球生物圈之外。航天时代的到来使得人类足迹进入太空,地月空间经济圈的发展将使数以万计的人类居住在地-月系统中,构成地球之外的新社会。最终,人类在太阳系中地球之外空间的生存发展可能成为社会进化和文明发展的重要过程,使人类文明从地球空间拓展至地月空间,直至更加深远的太阳系空间。
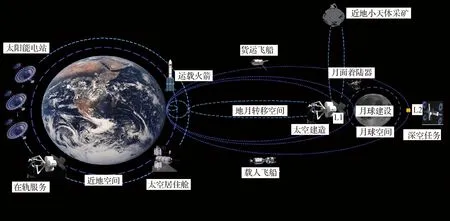
图15 地月空间经济圈Fig.15 Cislunar space economic system
4.2 地月空间经济圈发展的历史机遇与实现方向
当前,航天界已经对地月空间发展的巨大价值和重要意义取得了普遍共识[54-55]。无论是从技术进步上看,还是从社会和经济发展上看,人类文明发展已经进入了建设地月空间经济圈的历史机遇期。从技术上看,地月空间是利用化学推进技术就可以有效建立运输体系的资源聚集区域。世界上的主要航天大国都已经成功实施或正在开展载人月球探测计划,基本具备了构建地月空间经济圈的技术储备。从社会发展角度看,随着人类生产力发展与地球资源、环境承载能力之间的矛盾日益突出,迫切需要拓展新的生存与发展空间,为社会发展提供新的资源供给地和新兴消费市场。从经济发展角度看,传统大型航天企业已经开始在地月空间领域寻求新的业务增长机会。2017年,波音与洛克希德-马丁公司的合资企业提出了一项名为Cislunar 1000的地月空间发展远景,计划围绕空间资源制造、运输和销售等方面发展一系列商业活动,实现未来30年内有1 000人在地月空间工作和生活的目标。国际风险投资和股票市场也在持续增加对新兴太空商业领域的投入。相关航天高科技创业公司的数量自2000年以来增长了数十倍;股权投资也呈指数级增长,从2014年的200亿美元增长至2019年的1 300亿美元[56]。这些技术、社会和经济因素都能为地月空间经济圈发展提供有力支撑。
面对历史机遇,如何实现可持续发展仍然是构建地月空间经济圈所面临的关键问题。美国阿波罗计划的历史经验表明,仅仅依靠政府资金支持的航天计划是难以持续的。为保证地月空间经济可持续发展,参考社会和经济发展规律,从地月经济的体系架构、消费端、供给端和产业生态等方面出发分析了地月空间经济圈的实现方向。
1)构建完善的地月空间经济圈体系架构
学术界对如何建立科学的地月空间经济圈架构进行了广泛讨论。国际空间大学根据当前传统的以及新兴的空间活动,定义了地月空间经济的11个垂直市场,并根据其相互依赖关系创建了初步的发展路线图。可以根据它们对整体经济的影响程度来指明哪些垂直市场更需要尽早实施[57]。科罗拉多州立大学研究了地月空间系统的体系架构,围绕科学、商业和国防任务3个方面,以及运输、通信、导航、能源、服务等支持功能,分析了潜在的解决方案和当前差距[58]。从地月空间引力阱的分布特征上看,由月球和近地小天体到地球静止轨道的速度增量远远小于从地面出发到达静止轨道的速度增量。可以设想,月球和近地小天体上的丰富资源将成为地月空间经济圈建设的物质基础,月面上将建造众多的采矿工厂,空间飞行器可以前往小天体执行采矿任务,或将小天体捕获到地月空间中进行重复采矿。在地球静止轨道上将建设太阳能电站和轨道环等工业设施,以形成地月空间的大型工业园区。还能将月球和近地小天体的物质资料运输到静止轨道上的工业园区,通过进一步加工生产出高附加值的太空产品和服务。同时,为了满足地月空间任务需求,需要发展地月空间导航、通信、态势感知等基础性空间设施。
2)创造持续的太空消费需求
大众消费需求是推动经济发展的源动力。如何面向普通大众,创造太空时代的物质和文化生活方式,推动他们进入太空生产和生活,是地月空间经济圈可持续发展的关键问题之一。从20世纪70年代开始,美国、日本等航天大国开始关注和发展空间太阳能电站的商业化项目,且已取得初步成果,在地面上进行了小功率的模拟试验。近几年,SpaceX、维珍银河以及蓝色起源等公司开始在低地球轨道太空旅游领域展开竞争。2021年7月,维珍银河和蓝色起源公司先后完成了其首次载人轨道试飞。同年9月,SpaceX公司将4名乘客成功送入低地球轨道,进行了为期3天的太空旅游观光。2022年4月,SpaceX公司又将4位乘客送往国际空间站,进行了共计10天的太空旅行。商业化的太空旅游和空间太阳能电站已经显示出巨大的发展潜力。以其为突破口发展太空经济,有望引导大众消费需求从地球表面向近地空间乃至地月空间逐步推进,最终发展出多层次、多方位、持续的消费需求,为地月空间经济圈发展提供源源不断的驱动力。
3)实现月球与近地小天体资源的工业化开采和加工利用
月球和近地小天体资源是地月空间发展的物质基础。受技术水平和投入经费的限制,美国、加拿大和欧洲航天局等先驱者的空间资源探索和实践任务目前还处在勘探和采样返回阶段,与工业化的资源开采和加工利用还存在较大差距。需要不断推进在轨服务、原位资源利用、人工智能和机器人等技术的深入发展和跨学科融合,利用空间资源构建可以自我复制和自我进化的机器人种群,推动形成以智能机器人为建设和生产主体、以航天员为监管主体的工业化开采与加工体系。
4)形成健康的地月空间产业生态
地月空间经济圈建设技术含量高、涉及产业多、辐射范围广,需要巨大的前期投资和基础建设才能走上自给自足、可持续发展的道路。如何发挥政府、政府间组织以及企业、高校、科研机构等各类主体的共同作用,形成集政、产、学、研、用于一体的创新发展格局,对地月空间经济圈的可持续发展至关重要。为了形成健康的地月空间产业生态,政府机构需要积极发挥引导和监督作用,从经费、政策、科技、人才等多个方面,为企业提供多元化的发展机会,构建安全协作和良性竞争的营商环境。航天骨干企业具有强大的综合实力,可以积极参与空间资源勘探以及空间运输、通信、导航和能源等工业基础设施建设,将为地月空间经济发展夯实基础。中小微创业公司具有活跃的创新能力,能够面向不同的消费群体提供差异化的高附加值产品和服务,将为产业发展注入活力。同时,各发展主体间协同合作、共生发展,将有利于实现不同产业链环节的跨链合作和不同产业领域的跨界合作。
5 结 论
从地月空间发展的体系架构出发,分析了地月空间发展面临的若干工程和技术问题,包括经济可持续的地月空间运输体系、地月空间的资源利用与基础设施建设、月面机器人的先导性和主力军作用、地月空间经济圈的讨论等。论文研究形成的主要结论和建议如下:
1) 地月空间运输体系是地月空间发展最核心的基础设施,其中天地往返、地月转移和月面着陆与上升这三个阶段分别处于不同的物理环境中,需要根据各自的环境特征发展不同的飞行器、运输方式和重复使用方案。天地往返跨大气层飞行是最为昂贵和复杂的阶段,建议着重发展可重复使用的运载火箭、载人飞船;在地月转移阶段,弱重力、无大气环境使得飞行器结构更轻,建议通过推进剂补给实现地月转移飞行器的经济可持续使用,其中地月转移飞行器以可接受速度增量停靠在近地轨道空间站以及在地月轨道空间站之间找到可行且速度增量可接受的转移轨道是需要回答的两个关键技术问题。空间站常态化运营已具备成熟的工程技术基础,载人月球探测应将其作为技术基点,充分利用空间站建设所形成的天地往返运输能力,以地球轨道空间站作为天基港口实现二者的一体筹划与设计。载人月球探测工程可更加专注于地月转移、月面升降和月面探测与建设的技术突破与创新。
2) 月球和近地小天体具有丰富的资源,是地月空间发展的物质基础。从月球、近地小天体到地球静止轨道的速度增量远低于从地面到静止轨道的速度增量,在地球静止轨道上的工业园区将这些物质加工成产品。月球和近地小天体资源的大规模开采将是地月空间发展的重要环节。从地球引力阱分布及能量消耗的角度看,地球静止轨道是理想的地月空间工业园区,建立空间太阳能电站、轨道环等系统,为地月空间发展提供基础服务。月球空间具有真空、低重力、低温环境等独特条件,为磁悬浮运输、太空电梯、天钩等电气化运输手段发展提供了便利。地月空间发展离不开导航系统的支持,考虑到地月空间远离地面、人员支持有限的状况,需要发展全自主的地月空间导航系统及其实现方法。
3) 面对严酷的月面环境和人力资源稀缺的现状,智能机器人在月球建设中将发挥先导性和主力军作用,是月球建设必不可少的支撑力量。异构协作机器人和集群机器人将在月面设施准备与维护任务中发挥关键作用:通过对作业机器人结构、功能的异构设计和组合应用,可以采用低成本方式实现初级月球基地的全部建设和运营任务;受生物集群行为启发的智能集群机器人可以充分发挥其自治性、分布式和大规模作业的优势,提高任务实施过程的可靠性和适应性。航天员辅助机器人将被用于航天员陪伴、辅助作业、人机协作等任务,是对月面严酷环境中人类智能和体能的重要补充,是提高航天员的探测范围和效率的有效途径。机器人在月面的太阳同步机动,将有效突破月面能源和温度条件的制约,实现机器人对月球两极地区的大范围、长时间持续探测,对于月球基地选址等具有重要意义。
4) 经济可持续是任何载人航天计划都不能背离的根本法则,地月空间发展也不例外。地月空间发展不仅仅在于载人登月,而是一个更加复杂的体系性工程,以建立地月空间经济圈、满足国家利益向地月空间拓展为根本目标。发展地月空间经济圈可以促使国家的利益边界从地面、海洋延伸至地月空间,推动太空产业布局从围绕地球向围绕地月空间发展,并拓展人类的生存与发展空间,促使人类社会由地球文明向太阳系文明迈进。在地月空间经济圈建设中,需要着重注意从地月空间发展的体系架构出发,以国家利益发展和大众消费带动地月空间发展,培育健康完善的地月空间产业生态。
总之,地月空间发展将使人类挣脱地球摇篮的束缚,大大拓展人类社会的生存空间和利益边界,将成为人类文明发展的重要里程碑。
