非线性扰动估计器用于永磁同步电机抗干扰控制
2023-05-05刘逸坚王树波
刘逸坚,王树波
(1.青岛大学自动化学院, 山东 青岛 266071;2.山东省工业控制技术重点实验室, 山东 青岛 266071)
0 引言
永磁同步电机(permanent magnet synchronous motor, PMSM)因其体积小、重量轻、结构简单等特点在航空航天、数控机床、工业探测等领域中获得了广泛应用[1-3]。但是,PMSM是一个典型的非线性多变量强耦合的系统,其参数易受到未知扰动影响而发生变化,从而降低系统控制性能,因此有必要设计一种有效的控制策略来补偿电机伺服系统中存在的未知动态,从而提高系统的性能。
滑模控制(sliding mode controller, SMC)因其对模型精度要求低、对外界干扰鲁棒性强而成为研究热点,且目前SMC已成功应用于电机控制系统[4-6]。但是,由于SMC在实际应用中切换控制律存在时间延迟,这会导致系统状态进行高速切换引起抖动,也就是所谓的抖振。为了解决抖振问题,文献[7]提出了一种动态滑模控制方法,设计的PID型SMC通过增加一个附加的动态变量来获得分层的滑动面从而达到抑制抖振的效果。文献[8]提出一种基于模型参考自适应的方法来估算电机速度和转子位置的方法,通过改良指数趋近律,对符号函数进行平滑处理来削弱抖振。文献[9]提出一种模糊滑模控制策略,通过实时调整切换增益的大小来提高PMSM的动态性能。文献[10]提出了一种基于Hurwitz趋近律的方法来消除传统趋近律中的不确定性干扰,提高系统的动态性能和鲁棒性。文献[11]针对扰动未知的伺服驱动系统,提出了一种具有规定性能的预设时间滑模控制方法,能够实现跟踪误差的快速收敛,增强系统的抗扰性能。上述方法虽然能够提升电机控制精度,但是会出现计算量大、受到干扰后响应速度变慢等问题。
为了解决上述问题,提出一种基于非线性扰动估计器(nonlinear disturbance estimator, NDE)的PMSM抗干扰滑模控制方法,设计NDE对系统集总不确定性进行估计,并引入变指数滑模趋近率,从而进一步改善PMSM调速系统的动态性能,增强系统的鲁棒性。
1 永磁同步电机系统结构及滑模控制算法
1.1 永磁同步电机工作原理
永磁同步电机作为一种同步电机是凭借同步速度产生电动势的旋转磁场工作的,当通过三相电源为定子绕组通电时,会在气隙之间产生旋转磁场。通常将电机的转子坐标轴(d-q轴)作为参考坐标轴,那么表贴式永磁同步电机的数学模型可以描述为
式(1)中,id、iq分别为d轴和q轴的电流;Ud、Uq分别为d轴和q轴的电压;Rs为定子电阻;Ld、Lq分别为d轴和q轴的电感且满足Ld=Lq=L;ψf为永磁体产生的磁链;np为永磁同步电机的极对数;ω为电机机械转子角速度;TL为负载转矩;J为转动惯量;B为摩擦阻尼系数。
由式(1)可得机械转子角速度ω与q轴的电流iq之间的关系可以表示为
式(2)中,Kt=1.5npψf为转矩常量。
永磁同步电机调速系统是基于矢量控制理论,为了近似消除角速度和定子电流之间的耦合,一般将d轴参考电流id设置为0,从而实现近似解耦[12]。图1为本文永磁同步电机控制调速控制系统结构示意图,其中,电流和速度控制回路被解耦。
为了便于计算,令a=-B/J,b=Kt/J,d=-1/J,u=iq,则式(2)可以表示为
考虑系统参数的不确定性,式(3)可以被写成

(4)
式(4)中,Δa,Δb,Δd分别代表系统参数的不确定性,ћ=Δaω+Δbu+(d+Δd)TL为系统的未知动态。

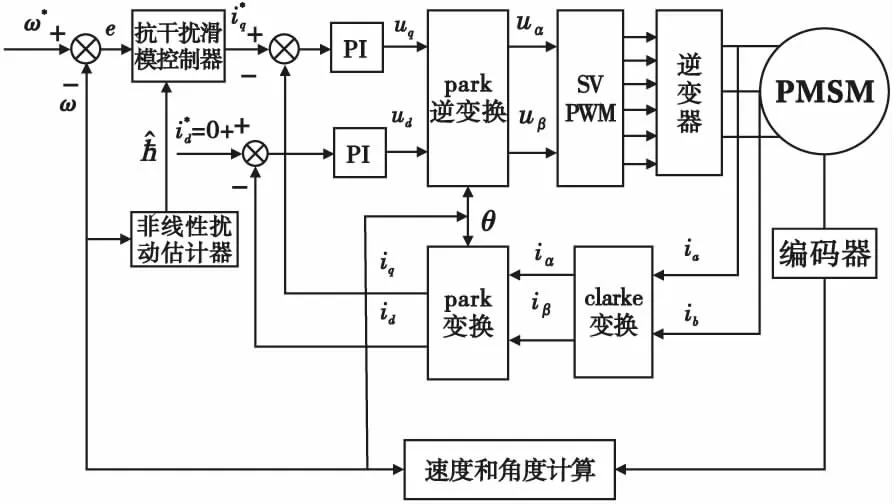
图1 PMSM调速控制系统结构图Fig.1 Structure diagram of PMSM speed control system.
1.2 滑模控制算法
滑模控制主要包括滑模趋近律设计和滑模面设计,其中滑模趋近律使系统状态达到设计的滑模面来获得所期望的控制效果。在滑模控制中,开关增益应该设置得足够大,以抵消系统扰动,从而保证系统的强鲁棒性和稳定性,即开关增益应该随着系统扰动的增加而增加,但是过大的增益会引起剧烈的抖振,因此一般采用非线性扰动估计器和滑模控制相结合的控制方法。
2 基于非线性扰动估计器的SMC方法
2.1 非线性扰动估计器原理及分析
为了估计式(4)中的集总不确定性,定义ω和u的滤波变量分别为ωf和uf,设计了一个新型的非线性扰动器估计如下所示:
式(5)中,τ>0是滤波时间常数,滤波信号目的是导出不变流形,用于构建非线性扰动估计器。
推论1 基于系统(4)和式(5)定义一个辅助变量γ:
此外式(6)满足
那么(ω-ωf)/τ-(aωf+buf+ћ)=0对任意正常数τ是不变流形。
证明:对γ求导得
选择第一个Lyapunov函数为
计算Vγ的导数得

由式(7)可得,非线性扰动估计器可以设计为
定义估计器的估计误差为

(12)

证明:由式(4)可以推出
(13)
式(13)中,ћf是未知动态的滤波版本,则估计误差的导数可以表示为
选择第二个Lyapunov函数为

计算Vћ的导数得
2.2 滑模控制器算法实现
定义速度跟踪误差为
e=ω*-ω,
(17)
式(17)中,ω*为期望速度,ω为实际速度。
对式(17)求导,e的导数为

(18)
选择积分滑模面如下:
(19)
式(19)中,k为大于零的常数,为了兼顾趋近速度和抖振水平,设计一种改进的变幂指数趋近率,在提高趋近速度的同时抑制抖振,该趋近率可以表示为

对式(11)求导,滑模面的导数为

(21)
结合设计的趋近率(12)与式(13),可得速度环控制器的输出为
2.3 稳定性分析

证明:选择Lyapunov函数
计算V的导数得

(24)
3 仿真分析和实验验证
3.1 仿真分析
为证明所设计估计器的有效性,设置集总不确定性信号分别为阶跃信号ћ=10 N·m,正弦信号ћ=sin(t) N·m,仿真结果如图2所示。
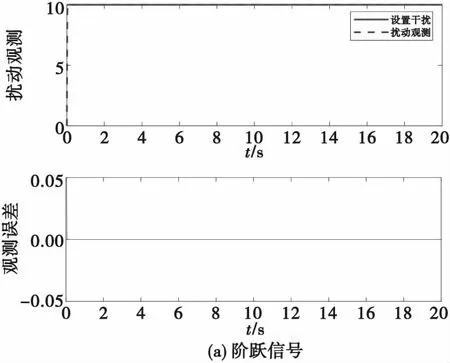
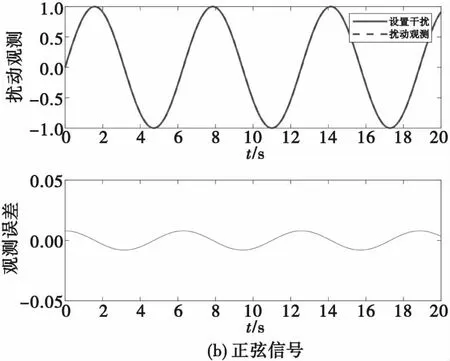
图2 对不同扰动信号的估计Fig.2 Estimation of different disturbance signals
仿真结果表明,即使未知动态信号为任意非线性信号,所设计的非线性扰动估计器都能做到有效快速的估计跟踪,为后面抗扰动控制器的设计提供了强有力的理论基础。
接下来进一步验证本文所提算法的有效性,选择经典PI控制器和基于普通非线性扰动估计器的传统积分滑模控制器作为比较,模型仿真参数如表1所示。
其中普通非线性扰动估计器为
式(25)中,p为系统内部变量,ζ为观测器增益。

表1 同步电机系统参数Tab.1 synchronous motor system parameters
控制器参数:
1) 本文采用基于新型非线性扰动估计器和新型趋近率(NDE+NISMC)的控制器参数为k=200,k1=1.5,k2=1.5,α=1.5,β=0.8,δ=0.01,λ=2,τ=0.001。
2) 基于普通非线性扰动估计器和传统趋近率(NDE+ISMC)的控制器参数为k=200,k1=1.5,k2=0.5,ζ=50。
3) PI控制器参数为kp=15 ,ki=800。
跟踪阶跃信号,设参考信号xd=1 000,在0.5 s和1 s时分别加减阶跃扰动信号d=2 N·m。仿真结果如图3所示,图3给出了阶跃信号下的速度跟踪(图3(a)),跟踪误差(图3(b))和控制输出(图3(c))。从图中可知,PID控制和积分滑模控制的收敛时间分别大约为0.1 s和0.7 s,而本文方法的收敛时间大致为0.3 s。在突加外界扰动时,PID控制和积分滑模控制的波动大约分别为1 r/min和0.5 r/min,恢复时间为分别为0.05 s和0.02 s,而本文方法的波动为0.2 r/min,恢复时间为0.01 s。
3.2 实验验证
采用实验方法验证本文提出算法的有效性,实验平台为电机驱动伺服系统,如图4所示。硬件由伺服驱动器、伺服电机、电机控制专用模块、负载控制模块、实时模拟器和扭矩传感器组成。软件部分由Matlab/Simulink和RT-SIM组成。控制算法在仿真主机的Matlab/Simulink搭建完成后编译成目标代码,然后通过使用的RT-SIM软件下载到目标计算机上运行。
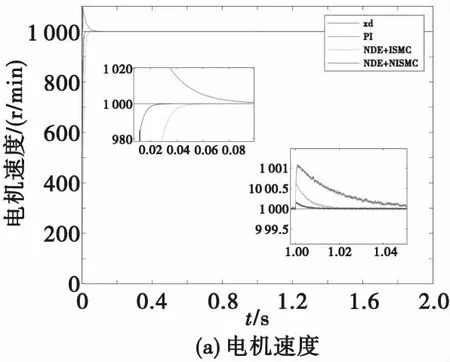
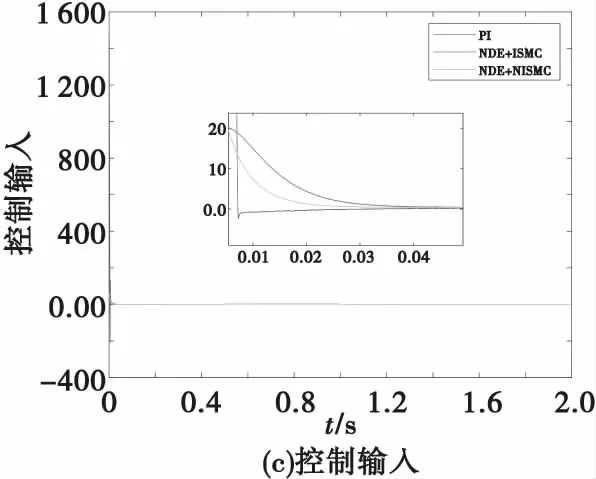
图3 阶跃信号仿真结果Fig.3 Step signal simulation results

图4 实验平台Fig.4 Experimental platform
当给定转速、负载未知且变化的情况下,将本文控制方法与PI控制方法、基于普通非线性扰动估计器传统积分滑模控制方法进行实验结果对比,控制器参数如下:
1) 本文采用基于新型非线性扰动估计器和新型趋近率(NDE+NISMC)的控制器参数为k=14,k1=0.01,k2=1.2,α=1.2,β=0.8,δ=0.01,λ=2,τ=0.003 2。
2) 基于普通非线性扰动估计器和传统趋近率(NDE+ISMC)的控制器参数为k=20,k1=60,k2=10,ζ=15。
3) PI控制器参数为kp=0.04 ,ki=0.5。
实验中分别给定转速200、1 000 r/min,负载转矩0 N·m。当电机运行至5 s时施加2 N·m的负载转矩并在10 s时负载转矩削减至0 N·m。
3.2.1电机200 r/min转速加减负载实验
图5是电机200 r/min转速加减负载曲线。由图5(a)转速变化曲线可知:在低速启动阶段PI控制的转速超调10%,调节时间为0.5 s;传统积分滑模控制无超调,调节时间为0.44 s;本文方法无超调,调节时间为0.4 s。由图5(b)加减载转速波形中可以得出:当负载转矩在5 s发生变化时,PI控制转速跌落至143 r/min,传统积分滑模控制转速下降至155 r/min,本文方法转速跌落至170 r/min;当负载转矩在10 s发生变化时,PI控制转速上升至256 r/min,传统积分滑模控制转速上升至240 r/min,本文方法转速上升至225 r/min。
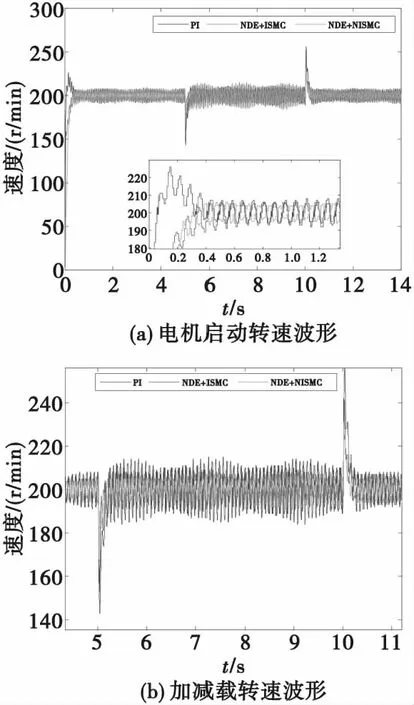
图5 永磁同步电机转速200 r/min加减载速度波形Fig.5 Speed fluctuation in the case of 200 r/min
3.2.2电机1 000 r/min转速加减负载实验
图6是电机1 000 r/min转速加减负载曲线。从图6(a)可以看出:PI控制的转速有超调,调节时间为0.65 s;传统积分滑模控制无超调,调节时间为0.6 s;本文方法无超调,调节时间为0.45 s。由图6(b)可以看出:当负载转矩在5 s发生变化时,PI控制转速跌落至945 r/min,传统积分滑模控制转速下降至960 r/min,本文方法转速跌落至970 r/min;当负载转矩在10 s发生变化时,PI控制转速上升至1 054 r/min,传统积分滑模控制转速上升至1 042 r/min,本文方法转速上升至1 031 r/min。
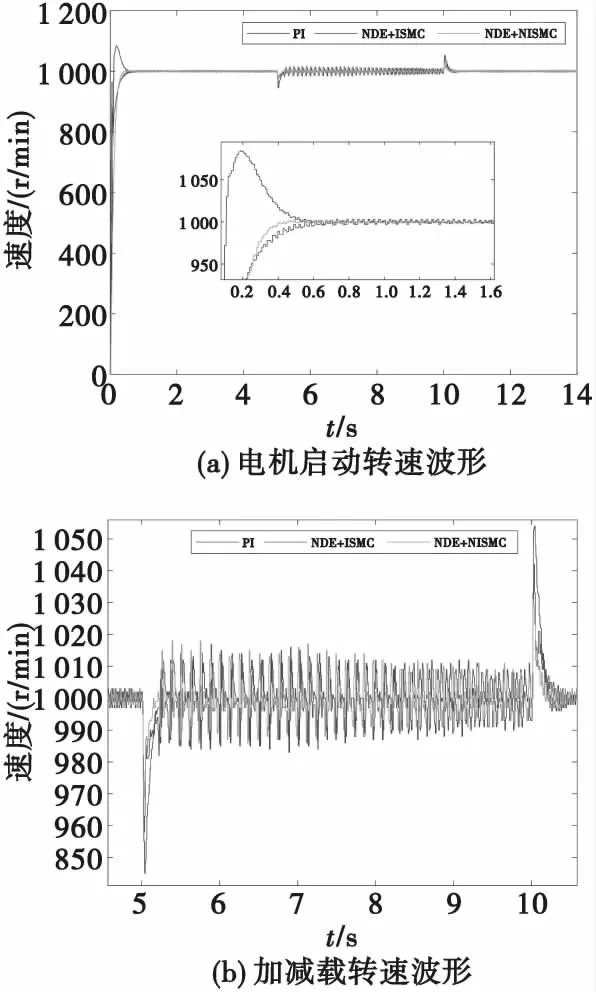
图6 永磁同步电机转速1 000 r/min加减载速度波形Fig.6 Speed fluctuation in the case of 1 000 r/min
基于三种控制策略详细对比如表2所示,从表中可以看出,在不同的转速下,本文所提出控制器具有更好的动态响应性能和抗干扰能力。
4 结论
针对未知扰动影响永磁同步电机正常运行的问题,提出一种基于非线性扰动估计器的抗干扰滑模控制方法。通过引入低通滤波等操作设计非线性扰动估计器,该估计器只有一个可调参数,可减少计算量;引入改进的变幂指数趋近律,并据此设计滑模控制器,该方法能够有效地抑制抖振。与其他PMSM控制方法相比,本文所提控制方法受到负载扰动后,恢复时间减少25%,转速波动峰值减小27%,具有更好的响应速度和抗干扰能力。
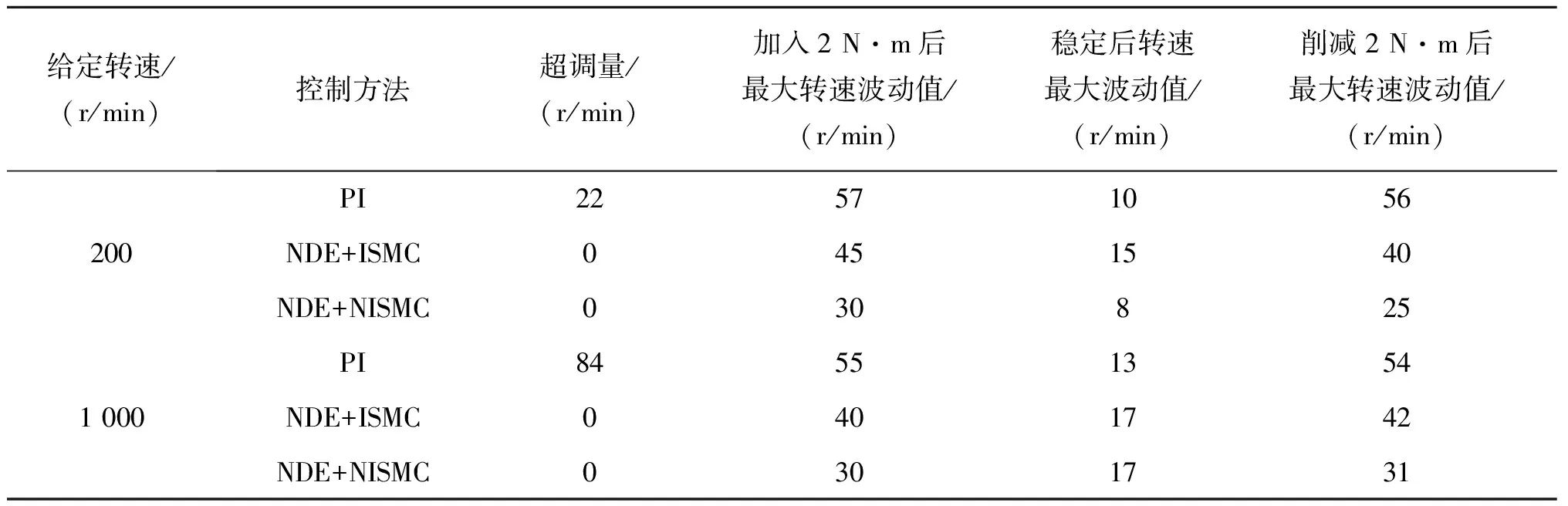
表2 不同转速下3种控制策略的性能指标对比Tab.2 performance index comparison of three control strategies at different speeds
