近水面拖曳浮标测试系统运动特性研究
2023-03-25邓玉聪郑孝彬王建军
张 锦,邓玉聪,郑孝彬,王建军
(1. 华中科技大学 船舶与海洋工程学院,湖北 武汉 430074;2. 中国船舶集团有限公司七五〇试验场,云南 昆明 650101)
0 引 言
目前水下通信大多利用长波、水声、激光、中微子等方式进行,但都存在一定的缺点。通信浮标技术使潜艇不浮出水面,就能直接与卫星或者基站高速通信,避免了采用自航器带来的水声通信噪声高、传播损失大等缺点的同时,满足了潜艇隐蔽性的需求[1]。但通信浮标长时间暴露于水面会产生尾迹,为了解决此问题,提出一种二级拖曳通信浮标,工作状态的拖曳通信浮标天线高出波浪表面一定距离,而二级拖体隐蔽在水下。
潜艇拖曳通信浮标在部署之前需要经过测试获得准确的动力学特性。Jagadeesh 等[2]利用1∶2 的AUV 模型在拖曳水池中进行拖曳试验,得到了AUV详细的水动力学数据。杜晓旭等[3]基于集中质量法,将拖缆首段的张力影响计入水下航行器的运动方程,分析了拖缆对航行器操纵性能的影响。沈建森等[4]建立了水下航行器的动力学模型并设计了舵控制器控制其在水下的深度,仿真结果与航行器实际的运动规律相吻合。金良安等[5]将一级拖曳系统视为一个整体,将拖缆力作为中间量实现拖船、拖体和拖缆三者的耦合,分析了拖缆和拖体对拖船操纵性能造成的影响。拖曳母船在海洋风浪等因素的干扰下会产生无规则运动从而影响整个拖曳系统,王海波等[6]设计一种波浪补偿装置,保持了拖曳点位置的稳定。上述拖曳系统中的拖体均工作在水下一定深度,不会受到波浪的直接作用,与本文中的拖曳浮标工作在近水面有很大不同,因此需要对拖曳系统测试平台进行动力学建模与仿真分析研究。
本文利用拖船与升沉补偿装置、一级拖体、一级拖缆搭建一种测试平台,该测试平台可以模拟潜艇水下的运动,并且可调节其拖曳速度与拖曳深度。以安装有可折叠天线并配备深度模糊控制器的通信浮标为测试对象,为了得出合适的拖曳参数,首先建立测试平台及被测对象的动力学模型,在Matlab/Simulink 中将测试平台与被测对象相耦合,并建立不同拖曳速度与不同拖缆长度条件下的拖曳试验仿真模型。最后根据仿真结果,分析上述因素对拖曳系统试验平台的影响。
1 测试系统结构及其动力学模型
1.1 测试系统结构及坐标系定义
为对拖曳通信浮标进行测试,本文提出如图1所示的测试系统,该系统包括测试平台和被测对象。测试平台由拖船与升沉补偿装置、一级拖体、一级拖缆组成,通过二级拖缆与一级拖体连接的二级拖体(即拖曳通信浮标)为被测对象。升沉补偿装置安装在拖船甲板上,负责补偿拖船由于波浪影响在垂直方向产生的升沉位移。一级拖体为大型沉降器,用于模拟潜艇的运动。

图1 测试系统结构示意图Fig. 1 Structure diagram of the test system and its coordinate system
测试系统的坐标系定义见图1,惯性坐标系O0X0Y0Z0的原点为拖船升沉补偿点所处的初始位置,被测对象拖曳浮标的随体坐标系OXYZ的原点为其浮心处。惯性坐标系与随体坐标系之间通过欧拉角相互转换。
1.2 一级拖体和拖缆动力学模型
一级拖体在测试系统中主要起压载和稳定作用,以实心铁球作为一级拖体,质量为5 000 kg,体积为0.62 m3,直径为1.07 m。
一级拖体为球状且与拖缆铰链连接,忽略其姿态变化,其动力学模型简化为在惯性坐标系下的三自由度动力学模型,如下式:
式中:F1为一级拖体所受外力,包括流体阻力、重力、浮力、两段拖缆的作用力;m1为一级拖体的质量及附加质量;U1=[u1v1w1]T为一级拖体在惯性坐标系下相对海流的速度矢量。
实际拖曳过程中,一级拖缆为钢缆,其刚度较大,且其所承载的拉力远大于所受流体阻力,将一级拖缆近似为弹簧阻尼模型[7],并建立动力学模型,如下式:
式中:FT为一级拖缆的拉力; Δl1s为一级拖缆长度的变化;为一级拖缆的弹簧常数;ks为一级拖缆拉力判定系数;cs为 一级拖缆的阻尼系数; Δus为一级拖缆两端的速度差的绝对值;Ac为一级拖缆在自然状态下的横截面积;l1s为一级拖缆在自然状态下的长度。
试验选用的一级拖缆长度直径为0.017 m,弹性模量为1010Pa。
1.3 二级拖体动力学模型
二级拖体采用流线型结构,如图2 所示。主体有2 对可变角度的前后翼、2 个固定的垂直尾翼,其中上方尾翼为天线安装平台。拖曳点位于拖体下方三角形钢架上,与二级拖缆连接。

图2 二级拖体结构Fig. 2 The structure of the secondary drag body
二级拖体的主要参数如表1 所示。
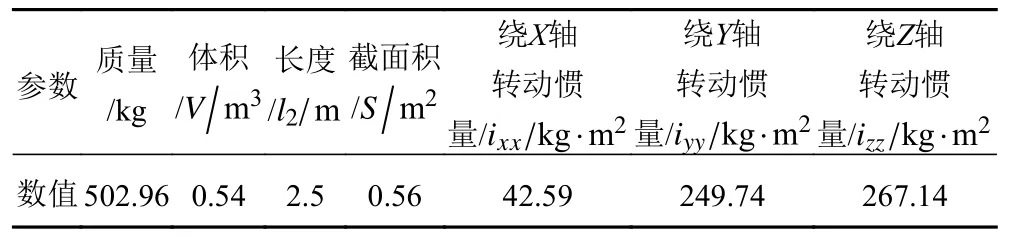
表1 二级拖体物理参数Tab. 1 Physical parameters of the tested body
基于水下航行器六自由度动力学模型[8],并考虑到拖曳过程中海流相对拖体的速度,建立的被测对象在随体坐标系下的动力学方程,如下式:
式中:FΣ为二级拖体所受外力;u,v,w为二级拖体相对海流的速度矢量; Ω=[p q r]T为二级拖体角速度矢量;RG为二级拖体重心位置;TΣ为二级拖体所受外力矩;I为二级拖体的惯性矩阵;U为二级拖体的速度矢量相对海流的速度矢量。
1.4 二级拖缆动力学模型
二级拖缆为脐带缆,刚度比钢缆小,因此作为柔性连接介质,采用凝聚参数法建立其动力学模型,建模前进行如下简化:
1)忽略拖曳过程中二级拖缆的弯曲刚度;
2)忽略拖曳过程中二级拖缆的扭转。
凝聚参数法的建模思想如图3 所示。将二级拖缆等分分段的受力以及分段质量集中于二级拖缆的等分点上,每个分段的拖缆都简化为弹簧模型[9]。在未受拉力状态下,将二级拖缆沿其轴向平均等分为20 份,二级拖缆首尾处的端点质量为二级拖缆总质量的1/40,第2~20 个等分点的质量则为二级拖缆总质量的1/20。不考虑二级拖缆的扭转,在惯性坐标系下建立二级拖缆动力学模型。

图3 凝聚参数法对二级拖缆建模示意图Fig. 3 Schematic diagram of towed cable by lumped mass method
二级拖缆动力学模型如下式:
式中:msi为脐带缆节点i的质量;lsi为脐带缆节点i的位置;Fsi为 脐带缆节点i所 受净浮力;fsi为脐带缆节点i所受水阻力;Tsi为 脐带缆节点i与 节点i-1之间的拉力。
通过对式(7)进行迭代求解,可得到二级拖缆各等分点处作用力以及各等分点位置坐标,将各等分点依次相连可近似得到二级拖缆的整体形态。
二级拖缆等分点所受流体阻力计算公式如下式:
式中:li为 二级拖缆等分段的长度;di为二级拖缆等分段的直径;Cti为 二级拖缆切向阻力系数;Cni为二级拖缆法向阻力系数;URti为二级拖缆等分点i相对于流体的切向速度;URni为二级拖缆等分点i相对于流体的法向速度。
二级拖缆等分点之间的拉力计算公式如下式:
式中,Ei为二级拖缆的弹性模量。
试验选用的二级拖缆直径为0.018m,弹性模量为109Pa。
1.5 附加质量和波浪力动力学模型
1)附加质量
二级拖体的运动会导致其受到周围流体的惯性阻力,等价于二级拖体质量的增加。二级拖体所受流体惯性阻力与二级拖体加速度的比例系数为附加质量,由于二级拖体关于XOZ面对称,其矩阵形式可简化表示为:
式中:附加质量 λi j中的下标i表示二级拖体所受惯性阻力或力矩的方向,j表示二级拖体平动速度或者角速度的方向,数字1,2,3 表示分别二级拖体在OX,OY,OZ方向的受力或者加速度,数字4,5,6 表示分别表示二级拖体绕随体坐标系OX,OY,OZ轴的力矩或者角加速度。
2)波浪力
为支撑通信天线浮出海面,二级拖体需要在近海面运行,因此波浪力是不可忽视的影响因素。二级拖体所受的波浪力以及波浪力矩利用Morison 方程求解。采用线性波模型对波浪进行建模,在惯性坐标系下波浪内部水质点速度分布如下式:
式中:uw,vw分别为波浪水质点在惯性坐标系下水平方向和垂直方向的速度;Aw为线性波波幅;kw为线性波波数; ωw为 线性波角频率;x2为二级拖体在惯性坐标系下的x方向坐标;z2为二级拖体在波面下的深度;h为惯性坐标系下所处海域的深度;t为时间。
2 二级拖体控制方法
为了提高潜艇的隐蔽性,二级拖体要始终位于波面之下0.8±0.3 m 工作,仅使通信天线发射部位处于海面之上一定高度。
2.1 二级拖体深度和姿态控制
基于模糊PID 算法的二级拖体前翼控制器可以通过检测相对于波面的实时深度控制前翼,进而控制二级拖体的深度,使其保持在合适位置。
二级拖体深度控制系统结构如图4 所示。将二级拖体深度误差e和深度误差变化率ec进行模糊化后,解模糊后输出PID 控制器的修正参数:比例修正系数ΔKp,积 分 修 正 系数 ΔKi,微分 修 正 系数 ΔKd,这3 项修正系数分别与PID 控制器中的比例系数Kp,积分系数Ki,微分系数Kd进行线性叠加,从而实时整定PID 控制器的参数。
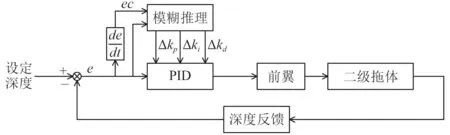
图4 模糊PID 深度控制结构Fig. 4 Deep control structure based on fuzzy PID
式中:u(t)为PID 控制器的输出即二级拖体前翼角度;e(t)为PID 控制器的输入即二级拖体相对于波浪表面的深度与期望深度的实时误差;Kp,Ki,Kd分别为模糊算法整定后的比例系数、积分系数和微分系数;Kp0,Ki0,Kd0分别为PID 控制器初始状态下设置的比例系数、积分系数和微分系数; ΔKp, ΔKi, ΔKd分别为经过模糊推理得到的修正比例系数、修正积分系数和修正微分系数。
基于PID 算法的二级拖体后翼控制器通过检测自身姿态对后翼翼角进行调整,进而控制二级拖体的姿态。在拖曳过程中对波面的追踪可能会导致自身姿态频繁变化,为避免PID 算法出现饱和的情况,采用去掉积分环节即PD 控制器对二级拖体的姿态进行控制,其结构如图5 所示。

图5 PD 姿态控制结构Fig. 5 PD-based attitude control architecture
采用试凑法对后翼的PD 控制器进行整定,其数学表达式如下式:
式中:uθ(t) 为 PD 控制器的输出即后翼角度;eθ(t)为PD 控制器的输入即二级拖体实时姿态角与期望姿态角的误差;Kθp为 比例系数;Kθd为微分系数。
3 二级拖体模型试验
为了得到二级拖体水动力系数,采用模型拖曳试验测量二级拖体的阻力系数,同时对二级拖体进行流体仿真。模型利用3D 打印技术按照3.5 的缩尺比打印成型。在得到模型的相关阻力系数后利用二因次换算法换算成二级拖体的实际阻力数据。
根据附加质量的定义,设定二级拖体在流场中做1 m/s2的加速平动和0.1 rad/s2的加速转动,仿真得出二级拖体受力。根据试验结果,得到如表2 所示的二级拖体水动力系数;根据仿真结果,得到如表2 所示的附加质量系数。
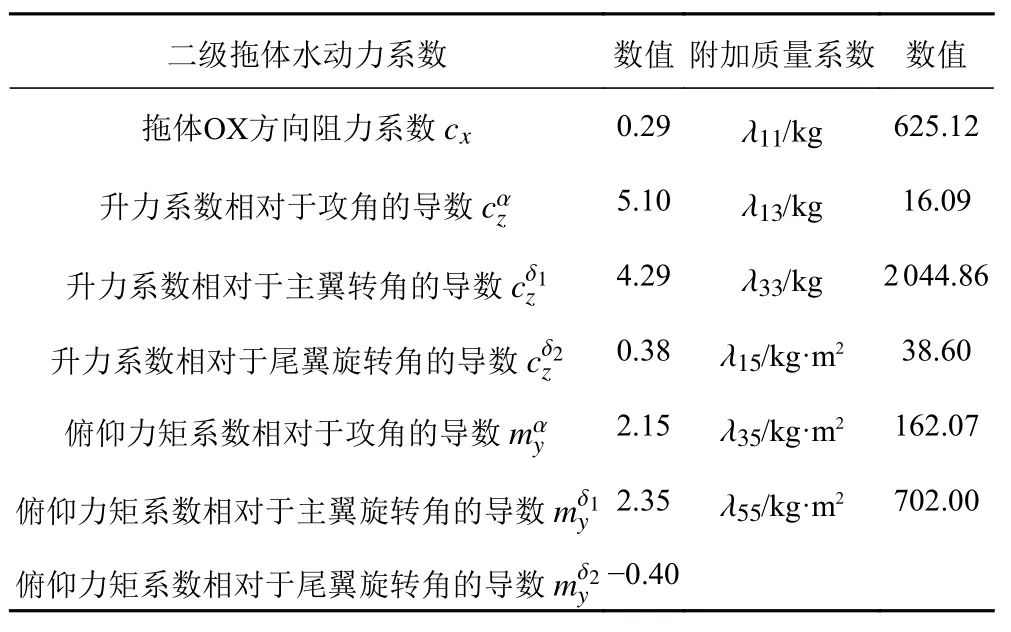
表2 二级拖体水动力系数及附加质量系数Tab. 2 Hydrodynamic coefficient of secondary drag body and coefficient of added mass
4 系统仿真结果分析
4.1 仿真模型及模拟工况
在Matlab/Simulink 中搭建了测试平台的仿真模型,其模拟工况为:测试平台在4 级海况下,分别以1 m/s,3 m/s,5 m/s 的拖曳速度;长度为60 m,70 m,80 m 的一级拖缆以及长度为150 m,200 m,250 m 的二级拖缆,拖曳对象正对波浪匀速行驶。
4.2 拖曳速度对测试平台影响
设定测试平台的二级拖缆长度为200 m,一级拖缆长度为 80 m,在1 m/s,3 m/s,5 m/s 拖曳速度下,一级拖体与二级拖体的运行深度分别如图6、图7 所示。

图6 不同拖曳速度下一级拖体深度对比Fig. 6 Depth of the ballast under three towed velocity
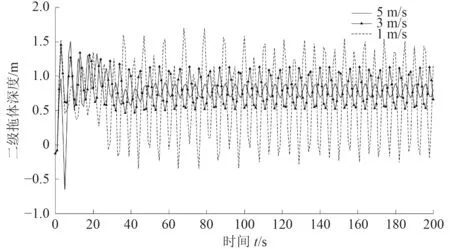
图7 不同拖曳速度下二级拖体深度对比Fig. 7 Depth of the tested body under three towed velocity
当拖曳速度为1 m/s 时,一级拖体稳定后的运行深度为8 0.6 5 ~8 0.8 1 m,二级拖体的运行深度为-0.23~1.53 mm,此时最大深度导致二级拖体搭载的天线不能正常工作,而且在最小深度时拖体已经露出波面。以3 m/s 和5 m/s 拖曳速度工作时,一级拖体的运行深度分别为71.97~72.04 m 和52.59~52.69 m,二级拖体的运行深度分别为0.53~1.13 m 和0.67~0.89 m。
分析表明,拖曳速度变化对一级拖体的稳定深度具有较大影响,随着拖曳速度增加,水下系统受到流体阻力增加,导致一级拖体的运行深度减小近20%。被测对象的深度变化幅度受波浪力干扰较严重,拖曳速度增加后,被测对象前舵的控制力增加,有利于减小其深度波动幅度,改善其深度控制效果。
4.3 一级拖缆长度对测试平台影响分析
控制其余条件不变,设定一级拖缆长度分别为60 m,70 m,80 m,测试平台以5 m/s 拖曳速度运动,一级拖体与二级拖体运行深度分别如图8 和图9 所示。分析可知,一级拖缆的长度变化对一级拖体和二级拖体的深度无明显影响。
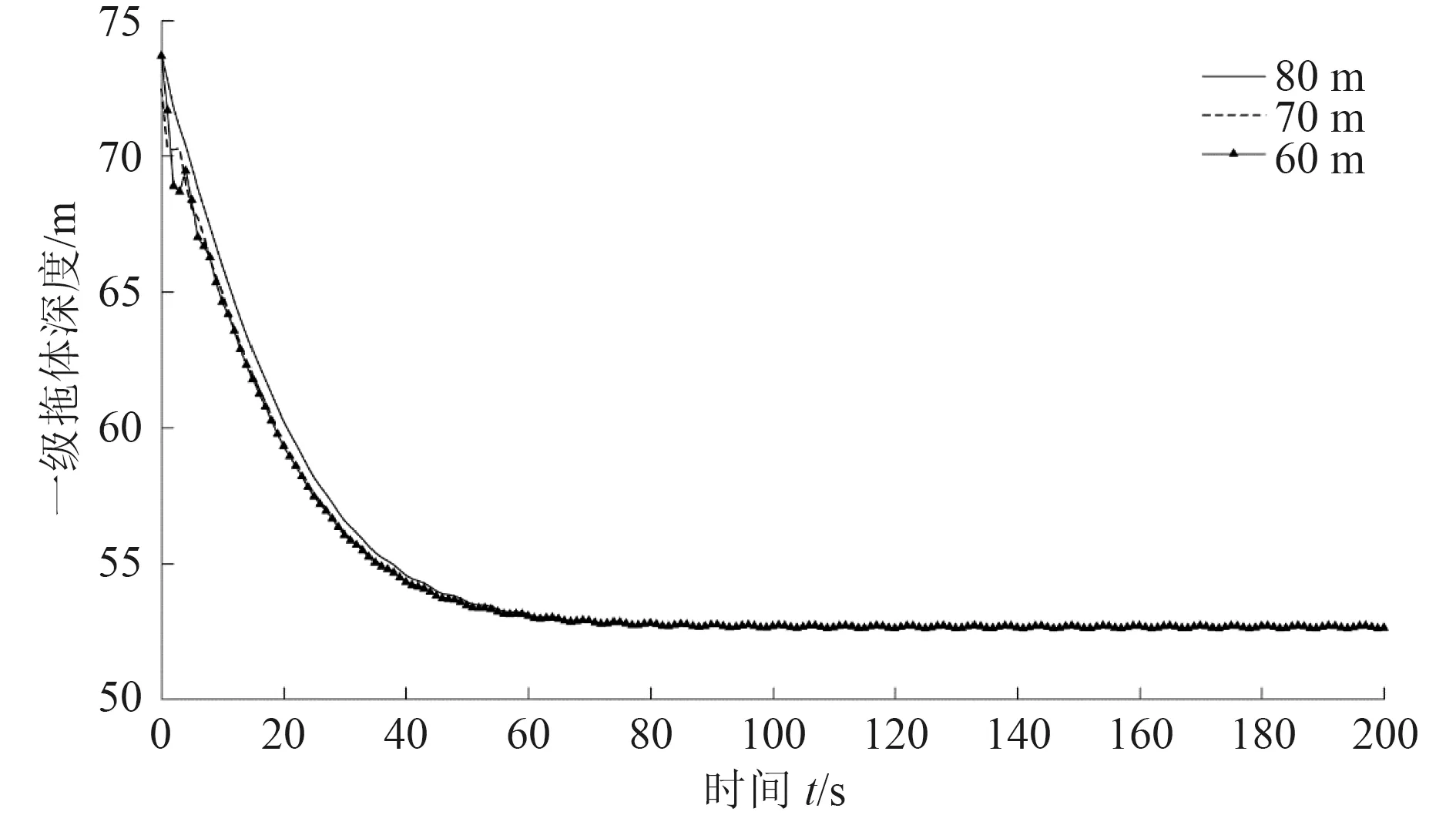
图8 不同一级拖缆长度情况下一级拖体深度变化对比Fig. 8 Depth of ballast under three lengths of the first-stage flexible towed cable
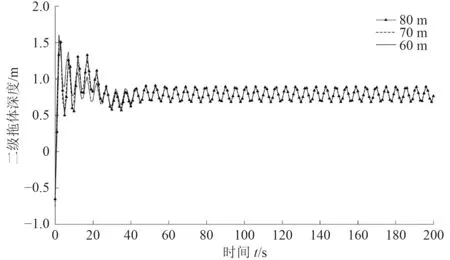
图9 不同一级拖缆长度情况下二级拖体深度变化对比Fig. 9 Depth of the tested body under three lengths of the first-stage flexible towed cable
4.4 二级拖缆长度对测试平台影响分析
控制其余条件不变,设定二级拖缆长度分别为150 m,200 m,250 m,测试平台以5 m/s 的速度拖曳被测对象运动,一级拖体与被测对象运行深度分别如图10 和图11 所示。分析可知,增加二级拖缆的长度,被测对象的运行深度仍能保持较高的稳定性,一级拖体的深度变化幅度可达2%以上,但其深度波动幅度受二级拖缆长度影响较小。

图10 不同二级拖缆长度情况下一级拖体深度变化对比Fig. 10 Depth of ballast under three lengths of the second-stage flexible towed cable

图11 不同二级拖缆长度情况下二级拖体深度变化对比Fig. 11 Depth of the tested body under three lengths of the second-stage flexible towed cable
5 结 语
为解决潜艇拖曳系统进行运动性能测试时不便直接利用潜艇进行拖曳试验的问题,提出一种可以模拟潜艇拖曳试验的测试平台。首先介绍测试平台的结构及工作原理,建立测试平台的动力学模型及仿真模型。
对测试平台在不同拖曳速度、不同一级拖缆长度以及不同二级拖缆长度下的拖曳试验进行了仿真分析,根据仿真结果可得到如下结论:
1)拖曳过程中,随着拖曳速度的增加,一级拖体的稳定深度减小,过渡至稳定状态的时间增大,但深度变化波动幅度受拖曳速度影响较小。对于被测对象,由于深度控制力随拖曳速度增加而增大,因此深度波动幅度减小,有利于正常工作。当拖曳速度为1 m/s 或更小时,被测对象的天线已经不能正常工作。
2)拖曳过程中,二级拖缆长度增加,被测对象的稳定深度和深度波动幅度无明显变化,一级拖体的稳定深度增加,过渡时间增大,深度波动幅度无明显变化。
3)拖曳过程中,一级拖缆的长度变化对系统无明显影响。
