基于LABVIEW的电机控制和数据采集系统
2023-03-17黄鑫广江铭徐飞儿李应优
黄鑫广 江铭 徐飞儿 李应优

摘 要:针对具有双泵结构的汽车变速器液压阀板,在进行测试验证过程中,需分别独立控制双泵供油,提出了一种通过伺服电机驱动双泵,上位机采用LABVIEW平台开发,并通过相应的硬件设备实时采集控制电流、压力信号的电机控制和数据采集系统。该系统采用工控机、CAN卡、NI数据采集卡、SINAMICS S120组成硬件结构,通过设计上位机软件实现对伺服电机控制、多种信号采集功能,并重点介绍了上位机软件和实现方式,经现有台架改造和测试,该系统能够实现伺服电机转速控制和信号采集功能,能够满足液压阀板测试要求。
关键词:LABVIEW 伺服电机控制 数据采集
Abstract:For the hydraulic valve plate of automobile transmission with dual pump structure, it is necessary to control the oil supply of dual pumps independently in the process of test and verification. A motor control and data acquisition system is proposed, in which the dual pumps are driven by servo motor, the upper computer is developed by LabVIEW platform, and the control current and pressure signals are collected and controlled in real time through the corresponding hardware equipment. The hardware structure of the system is composed of industrial control computer, can card, Ni data acquisition card and SINAMICS S120. The upper computer software is designed to realize the servo motor control and various signal acquisition functions, and the upper computer software and implementation mode are mainly introduced. After the existing bench transformation and testing, the system can realize the servo motor speed control and signal acquisition functions, and can meet the test requirements of hydraulic valve plate.
Key words:LABVIEW; Servo motor control; The data collection
1 引言
LABVIEW是一种图形化的编程语言和开发环境,是美国国家仪器公司(简称NI)开发的虚拟仪器开发平台软件,被公认为标准的数据采集和仪器控制软件。近年来,随着虚拟仪器技术的发展,这一技术在测量与控制领域得到了快速且广泛的应用[1]。
作为SINAMICS系列驱动产品的一员,SINAMICS S120是一个适用于机械设备制造领域的高性能应用的模块化驱动系统。SINAMICS S120面向及其广泛的工业应用提供了高性能的单轴和多轴驱动,功率范围涵盖0.12~4500KW,具有廣泛的传动应用价值。依托其良好的扩展性和灵活性,可支持灵活的机床设计,并且可以快速实现定制的驱动解决方案[2]。
2 系统硬件方案设计
2.1 系统硬件组成
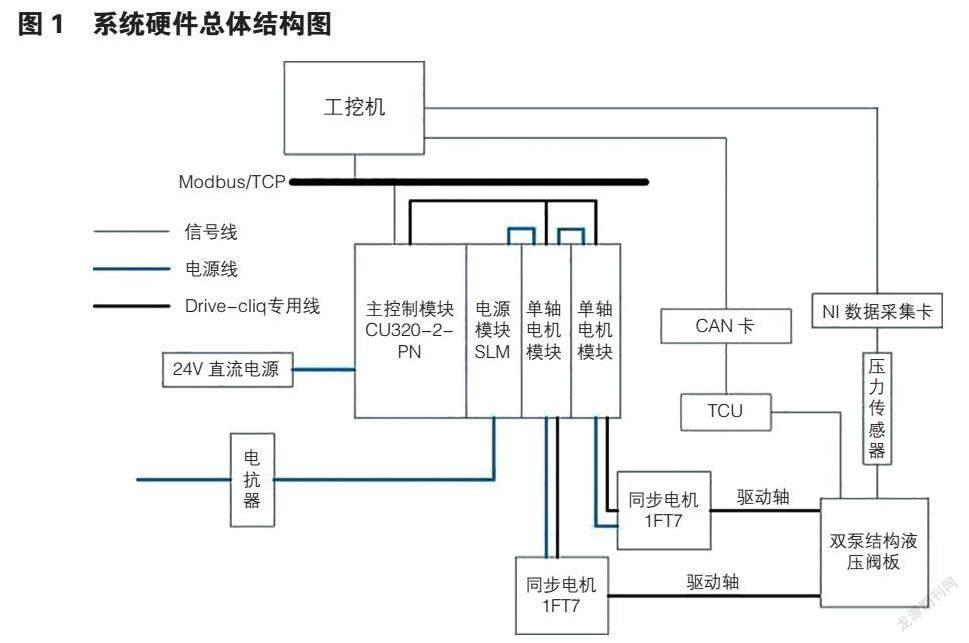
该系统由上位机(即工控机)、下位机(即西门子S120控制单元CU320-2-PN)、24V直流电源、电源模块SLM、单轴电机模块、同步电机1FT7、CAN卡以及NI数据采集卡等部件组成,其总体结构如图1所示。
伺服系统采用SINAMICS S120驱动系统,包括:进线电抗器、书本型非调节型电源模块、控制单元CU320-2-PN、两个书本型单轴电机模块、两个1FT7同步电机。
SINAMICS S120的控制器CU320-2-PN具有以下功能:数字量输入/输出、模拟量输入/输出(选件)、自由功能模块、驱动控制图(DCC)编程。其中,驱动控制图包括:逻辑运算功能、数据类型转换、闭环控制、工艺功能和系统功能。在一些控制系统中,CU320-2-PN完成可以取代PLC的信号采集和运算控制功能,这样不但可以简化系统结构,而且可以降低成本。同时控制单元CU320-2-PN集成多种通讯方式,包括:PROFINET、EtherNet/IP、Modbus /TCP、CANopen等,基于现有的硬件设备和上位机软件开发采用LABVIEW平台开发的情况下,采用Modbus/TCP通讯方式[3]最为简便,通过该协议可实现电机的速度控制、转矩控制和位置控制,其中该系统采用速度控制。
该系统中,阀板内部的电磁阀由自动变速箱控制单元TCU控制实际电流,目标电流由上位机软件控制并通过CAN总线发送,基于经验和知识储备,硬件设备采用致远电子USBCAN系列CAN接口卡,型号为USBCAN-II,该接口卡兼容USB2.0全速规范,可支持2路CAN接口,PC机可通过USB连入CAN网络,进行CAN总线数据发送和接收,且该系列设备拥有统一的接口函数,配以接口使用例程和接口使用说明,可根据实际需求进行修改,同时具备以下优点:具备体积小、便携、即插即用等优点;自带电气隔离模块,使其避免由于地环流的损坏增强可靠性。
在进行阀板内部的电磁阀性能测试中,需实时采集压力传感器信号,以便进行液压阀板性能分析。上位机软件基于LABVIEW平台开发,NI提供的模块化硬件、软件、服务可以帮助更快速进行测试,更高效地进行设计,提高测试可靠性,基于以上考虑,采用NI PCI6225数据采集卡来采集多路压力传感器信号。
3 软件设计及实现
3.1 下位机设置
准备工作:
1.硬件,包括:控制单元CU320-2-PN、伺服驱动器、CAN卡、NI数据采集卡、带以太网口的电脑、网线等;
2.软件,包括STARTER V5.4.2.1,CANtest,LABVIEW2020,WINDOWS 7;
在下位机中,控制单元CU320-2-PN已集成基本转速环、电流环控制程序,可通过SINAMICS调试软件STARTER进行配置和参数调整,其中Modbus协议是一种基于主站/从站结构的通讯协议,通过Modbus寄存器访问过程数据和参数,但需在从站(下位机)一侧指定对应的控制字、状态字和参数,相应的映射关系可参考西门子驱动功能手册通讯篇章。针对本系统,通过STARTER进行以下设置:建立S120驱动系统工程;完成电机参数识别、静态优化、动态优化;配置CU320-2-PN的接口X100激活Modbus/TCP协议;配置从站一侧Modbus寄存器、控制字、状态字等参数。
3.2 LABVIEW中实现Modbus
控制单元CU320-2-PN使用以下Modbus功能代码:
FC 03:holding register,用于从变频器读取数据;
FC 06:write single register,用于单个寄存器的写入;
FC 16:write multiple register,用于多个寄存器的写入。
上下位机数据交互包括:使能信号、转速信号、扭矩信号和温度信号,在下位机设置部分中,已根据控制要求合理分配交互信号位置,故在本次上位机软件设计中,只需使用FC 03/FC16即可实现转速控制和信号交互功能,LABVIEW中可通过Modbus库进行上下位机通信功能。
3.3 上位机软件实现
上位机软件主要采用顺序结构和while循环作为整体框架,通过case选择结构来设置转速波形和参数,该软件的流程图如图2所示。
3.3.1 CAN总线通讯
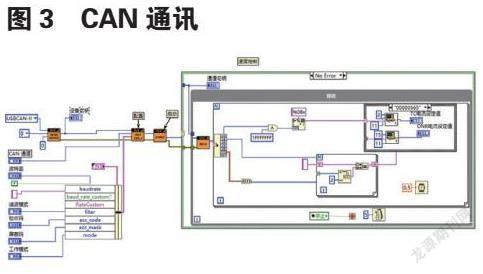
根据CAN卡硬件设备的使用说明,设计CAN通讯程序,CAN通讯控制程序如图3所示,其中接口函数库包括:打开设备、初始化通道、启动通道、复位通道、接收CAN报文、发送CAN报文、关闭设备等函数。在硬件设备上电完成后,通过调用打开设备接口函数进行打开设备操作,根据需求初始化所使用的通道CAN,再启动相应通道的CAN,最后读取CAN报文并进行解析,其主要作用为从CAN总线中提取控制电磁阀的目标电流,以便根据分析液压阀板的IP特性。由于目标电流的控制是通过已有的软件进行控制,故在本次的软件设计中只需开发CAN总线接收模块,不对CAN总线发送模块进行开发,能够有效简化软件程序结构,减少多个模块之间的影响,压缩报文解析程序运行时间,在CAN总线接收模块中根据目标控制电流在CAN报文矩阵的位置和换算关系进行解析程序开发,即可在LABVIEW中实现CAN报文中目标电流的接收和解析。
3.3.2 多通道数据采集
多通道数据采集程序如图4所示。
在DAQmx global channel中设置相应的物理通道,即可以选择单个通道,也可以根据需要,选择多个连续通道;DAQmx create channel用来设置物理通道的测量类型和范围(默认为-5-5V),类型包括:模拟输入、模拟输出、数字输入、数字输出等多种类型,可满足不同的需求;DAQmx start task.vi用于启动采集任务,DAQmx read用于提取已采集通道中的目标通道和数据类型,为了实现连续读取数据功能,需把DAQmx read置于while循环当中,采集完成后通过DAQmx clear task.vi来结束数据采集任务。
3.3.3 伺服电机转速控制
由于该系统只需控制伺服电机转速,控制单元CU320-2PN可取代PLC的信号采集和运算控制功能,在上位机软件中,只需设置使能信号和转速指令即可实现伺服电机控制,故在上位机伺服电机控制模块中,主要分为使能和转速控制两个部分,其中使能过程为,在建立Modbus/TCP通讯后先发送目标指令0x147E来激活控制逻辑功能,再发送目标指令0x147F来使能启动指令,表明控制单元和伺服器已准备就绪,发送目标转速即可控制伺服电机转速。完成使能部分后,即可发送转速控制指令,控制伺服电机转速。由于系统中采用双电机模式,故在转速控制模块中需设置两个信号发生器模块。
3.3.4 安全功能设置
由于本系统主要应用于试验台中,为了保证测试验证安全,需设计安全保护措施。主要是电机的安全保护,包括过流保护、限压保护,超速保护和扭矩监控。其中过流保护、限压保护可通过西门子S120控制单元CU320-2-PN实现,控制单元中包含基本的控制逻辑和相应的安全保证措施,可通过调试软件START进行相应的调整,但由于只能通过调试软件读取故障状态,不便于测试人员及时发现故障情况。故在上位机软件中设计基本预警功能,包括电机转速、温度、扭矩监控,从控制单元中读取电机转速、温度、扭矩信号,在上位机中进行与设计阈值比较,及时向测试人员预警,以便测试人员及时采取行动,保护人员和设备安全。具体功能步骤如下:读取目标信号;目标信号与阈值比较,分为两个等级,一级警告提示,二级报警停机;根据相应故障等级选择目标动作,即仅提示不停机或停机。
3.3.5 数据存储
该系统在运行过程中,需实时采集双电机转速、目标控制电流、液压阀板通道压力信号,并存储到相应的文件中,以便后续进行数据分析。LABVIEW支持的文件类型包括:ASCII码流文件、二进制流文件、数据记录文件、波形数据文件,由于在使用过程中,需要采集多个信号数据,同时测试时间的不确定性,采用以二进制流文件格式进行数据存储。LABVIEW采用数据流的方式执行程序,为保障整個软件程序的实时性、稳定性,不同的信号置于不同模块中,可实现信号之间的防干扰和提升程序执行速度,而在不同模块之间通过队列功能进行数据交互,同时在数据存储模块中读取所需存储的信号,以二进制流文件格式存储到特定位置和特定文件名中。
4 结束语
经台架改造和测试,采用工控机作为上位机,SINAMICS S120驱动系统作为下位机,以及CAN卡、NI数据采集卡等硬件设备,通过Modbus/tcp通讯协议进行上位机与下位机通讯,采用LABVIEW平台开发的数据采集和电机控制系统,能够实现两台伺服电机转速控制功能、数据采集和存储功能。为采用双泵结构的液压阀板测试和工程应用提供了新思路。
参考文献:
[1]Johnson G W,Jennings R.LABVIEW graphical programming【M】,New York:McGraw-Hill professional publishing,2001.
[2]西门子. SINAMICS S120和SIMOTICS. Siemens AG,2017.
[3]周文怡,方俊雅,朱子环.基于LabVIEW与Modbus/TCP的伺服电机控制系统.
[4]徐靖宸,任晓明,王梦琪.基于MODBUS协议的伺服电机控制系统设计.
[5]姜斌,刘彦呈,孔凡金,等.基于Modbus/TCP的工业控制网络设计[Z].低压电器,2007(13).
