高速公路交通事故时空影响动态效应的传播分析
2023-03-15杨洋胡嫣然袁振洲王云鹏
杨洋 胡嫣然 袁振洲 王云鹏
(1. 北京航空航天大学 交通科学与工程学院,北京 100191;2. 北京航空航天大学 车路协同与安全控制北京市重点实验室,北京 100191;3. 北京交通大学 交通运输学院,北京 100044)
中共中央、国务院印发实施的《交通强国建设纲要》将“安全”和“高效”列入总体要求[1],高速公路作为国家综合立体交通网的重要组成部分,其运行安全问题一直广受关注。高速公路交通事故造成的死伤人数和财产损失往往远大于发生在其他类型道路中的交通事故[2]。此外,高速公路的交通事故还是造成节点瘫痪和拥堵蔓延的重要诱因[3],据统计,高速公路中超过50%的非常规拥堵都是由交通事故引发[4],严重影响行车效率。因此,挖掘高速公路交通事故影响机理,探究其时空传播效应,对于降低交通事故对行车效率的影响,并针对性地实施事故后的动态交通控制具有重要的理论和现实意义。
针对高速公路事故时空影响传播的研究,主要是采用数学模型、仿真实验等手段,描述事故后车辆的排队和消散现象,量化事故造成延误的时空范围,并分析拥堵条件下的高速公路交通流运行特性等。Chow[5]早年便采用冲击波分析和排队论两种方法计算了交通事故发生后排队车辆的消散时间和驾驶人延迟时间。Morales[6]基于车辆守恒的基本概念分析了排队和消散机制,并将这些分析结果应用于两种传统的宏观分析方法——确定性排队分析和冲击波分析。王建军等[7]以流体力学车流波理论为基础,分析道路交通事故下的冲击波和对道路交通事故进行干涉下的冲击波,运用速度—交通流密度的线性关系建立模型,以确定交通事故后的最大排队距离、对事故进行干涉下的最大排队距离以及取消对事故干涉的时间点等参数。胡晓健等[8]首先确定了交通事故发生地周边能分流的区域,在此基础上进行OD(起讫点)反推和交通流再分配,以事故干预后的区域内行程时间为标准来确定道路交通事故的影响范围,并通过实例验证了该方法的可行性,为事故后的交通疏导提供了一定理论指导。Wang 等[9]应用改进的确定性排队理论量化不同交通事故类别产生的交通延误,实验结果表明,该算法能够较好地估计事故引起的延迟,并能捕获事故持续时间内高速公路交通流的演化。Chien 等[10]在考虑各种几何条件和时变交通分布的情况下,利用CORSIM 算法和确定性排队模型的概念,整合有限的仿真数据,提出了一种近似延迟的方法。Chung 等[11]开发了一种量化城市高速公路事故造成的延误的方法,并确定了此类事故造成的总延误的致因,该方法的基本思想是通过解决与时空区域拓扑一致的BIP(二进制整数规划)问题来估计由事故引起的拥堵区域最可能的时空范围。Sun 等[12]提出了一种基于数据驱动的事故影响评估方法,该方法可以根据处理后的数据识别每个交叉口的流量特征,然后通过异常值检测量化事故影响,也可以通过异质性模型来评估交通事故影响的持续时间;所开发的程序有助于捕捉城市交叉口或附近的事故影响持续时间,并识别出影响该持续时间的主要因素,包括事故特征、道路环境和附近交叉口的时间特征。Wang 等[13]开发了一种具有新颖约束的整数规划模型来估计道路交通事故的时空影响;模型的输入包括给定道路上的历史速度,以及已知事故的位置和开始时间,模型的输出为该事故影响的时空区域。该模型得到的结果与冲击波的传播理论是吻合的,其结果表明,该算法平均可减少95%~98%的计算时间。代萱[14]基于Van Aerde 模型,建立了交通流运行的交通波方程,研究中考虑了交通波可能会发生突变这一情况,将事故影响区域分为了保护区、控制区和缓冲区,并分析了各区域的通行能力,之后利用VISSIM 仿真工具验证了所提方法的有效性和合理性。针对高速公路的实时事故风险,Yang 等[15]通过选取交通流基础信息、交通流中车队的变道行为、交通流中车辆的运行状态、交通流变量短时间内的突变、车辆跟驰行为等反映交通流动态特征的5 个维度指标,构建了风险识别模型,明确了不同交通状态下的实时事故风险因子。
综上,在高速公路事故时空影响传播分析方面,目前虽取得了较为丰富的成果,但大部分既有研究是基于仿真结果且效率较低,适用性不理想;此外,在事故影响传播的度量上,多采用交通波理论计算排队长度等指标,角度较为单一,且对交通事故时空影响在上游传播的具体量化工作中,鲜有较为合理的指标被提出。有鉴于此,文中基于待研究路段的高速公路上微波雷达交通信息检测器采集的交通流数据以及对应路段的交通事故数据,引入速度变化率作为度量指标来判断某地点在某时刻是否受到交通事故的影响;应用双线性插值法对速度变化率在时空范围进行补全,得到了速度变化率轮廓图;然后根据速度变化率阈值,基于Savitzky-Golay 滤波拟合法对交通事故影响时空区域的外围轮廓点进行拟合,从而得到了事故影响时空区域的外围轮廓;最后计算和分析了不同速度变化率阈值下事故时空影响的各量化指标。
1 数据准备
1.1 研究区域
文中选取我国北京—哈尔滨高速公路(简称京哈高速公路)的里程桩号k0-k39(四方桥至西集)全长约39 km的路段作为研究路段,图1给出了待研究路段的区位情况。研究路段内可以收集到2013 年1月至2014年10月的交通事故数据(包含事故类型、严重程度、时间、地点)、交通流数据(包含1 min集计的海量高精度交通流量、速度、占有率以及85%速度等)。下面对两组数据源特征进行介绍。

图1 文中研究区域Fig.1 Study area
1.2 交通流数据
待研究路段的上下游方向共布设20 组微波雷达检测器,所采集的原始交通信息数据主要包括速度、流量、车道占有率等。上下游微波检测器之间的最远距离达6.18 km,最短距离为0.8 km,平均距离约为1.9 km。微波检测器主要采集的数据包括方向、各个车道的流量、车道占有率和速度等,采集时间间隔为1 min。以表1第1行数据为例,其含义为:在时间段2013-04-29 19:29:00—2013-04-29 19:29:59 内,在方向2(出京方向),编号为523050003 的检测器检测到车道1 的流量为22 辆,速度为59 km/h,占有率为16%。

表1 交通流数据示例Table 1 Examples of traffic flow data
微波检测器在实际工作过程中可能会因为有异物遮挡、通讯、恶劣天气等问题而造成所采集数据的缺失或者异常,需要进行数据清洗。以交通流三参数(流量、速度、占有率)的取值范围以及它们之间的基本关系作为判断依据,可筛选出异常数据[15]。表2给出了异常交通流数据的判别规则,如果交通流数据符合表中的一条或几条规则,便将其做直接删除处理。

表2 异常交通流数据的判别规则Table 2 Discriminant rules of invalid traffic flow data
1.3 交通事故数据
采集到研究路段内2013年1月—2014年9月的交通事故数据共198条,数据字段包括事故发生时间、桩号、方向、事故类型、事故描述等。删除由车辆起火、损坏等原因引发的单车事件,并对事故数据按照发生时间的先后顺序进行编号操作,以方便下一步的处理。经过数据预处理后,共提取研究路段和时间段内的交通事故共164起。交通事故发生的地点与交通流信息采集设备的空间关系如图2所示。

图2 交通事故与交通流检测器的空间关系Fig.2 Spatial relationship between traffic crash and traffic flow detectors
2 模型构建
2.1 相关理论方法
2.1.1 双线性插值
在大部分实际问题中,y=f(x)这个函数经常被用来描述某种潜在的数量关系,这种函数关系大部分是通过实验或者观察测量所得。尽管在x∈[a,b]这个区间内,f(x)是客观存在的,但往往只能给出部分x对应的f(x)值,不能得到[a,b]这个区间内任意x对应的函数值。并且,有时候虽然可以求得y=f(x)的表达式,却鉴于计算复杂等因素,在使用时并不方便。在一些问题中,有时需要得到没有给定的那部分x对应的f(x)值,这时候就需要一个既和f(x)的特性相符合、计算又比较简单的函数P(x)来对f(x)进行近似,求解所需要的f(x)值。一般情况下,P(x)为代数多项式或者分段代数多项式,同时还需要满足P(xi) =f(xi)(i=1,2,3,…,n)。这样求得的P(x)被称为插值函数。文中所使用的插值法具体描述如下:
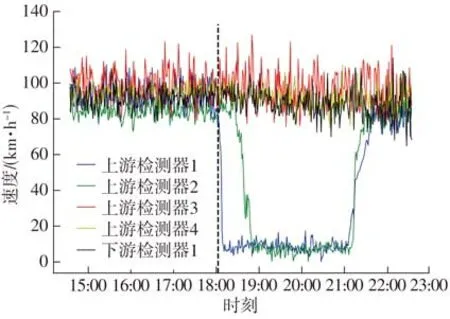
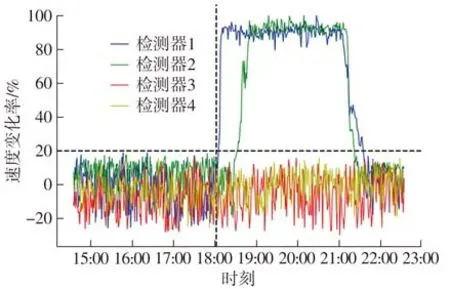
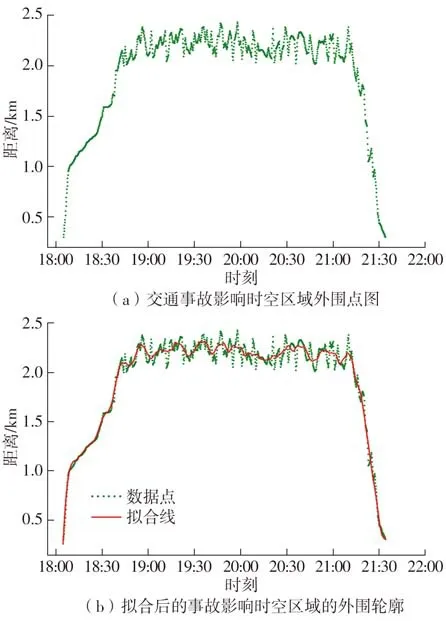
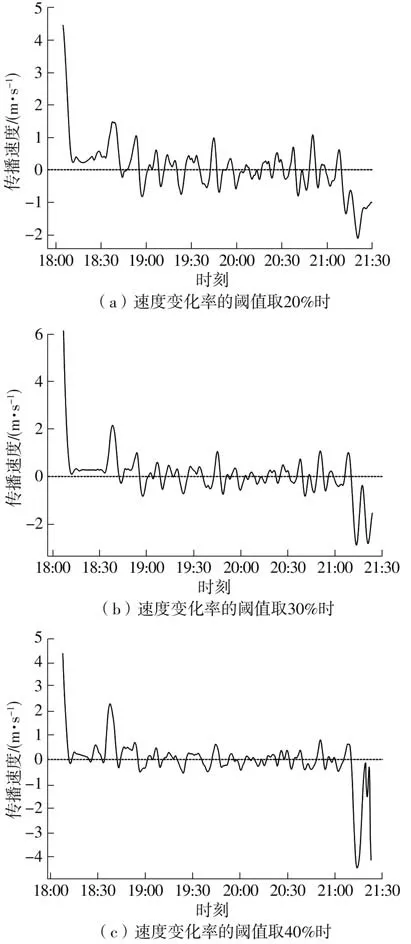
设函数y=f(x)在区间[a,b]内有定义,且已知在点a≤x0 成立,那么,就称P(x)为f(x)的插值函数,点x0,x1,…,xn为插值节点。线性插值即为P(x)是一次函数的情况,如图3所示。 图3 线性插值示意图Fig.3 Schematic diagram of linear interpolation 设 函数y=f(x) 上两 点(x0,y0)、(x1,y1),则[x0,x1]区间内某一位置x对应的y值为 在文中讨论的问题中,只能获得微波检测器所在位置以1 min 为集计间隔的速率,相应地,也就只能获得相同位置和时间的速度变化率。要想获得更具体时间和位置的速度变化率,就需要在时间和距离两个维度上进行插值。线性插值法广泛应用在信号处理、数字图像和视频处理等方面,包括一维线性插值法、二维线性插值法等。在一些需要多维的处理场景中,一维线性插值法往往无法满足要求,此时可以采用多维线性插值法或非线性插值法。本研究中应用的数据是一整条高速公路相邻的多个交通信息检测器所采集的交通流数据,具有很强的空间共线性,而非线性插值法无法处理共线性较强的数据。双线性插值法作为数值分析中的一种插值算法,从数学意义而言,是具备两个变量插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值,因此,文中采用二维线性插值法来实现事故前后交通流速度变化率的相应指标的构建与计算。当函数值由两个变量确定时,需要分别在x和y两个方向上进行线性插值。在本文讨论的问题中,x轴为时间,y轴为到事故发生地的距离,那么图3就变换成了文中问题的基本原理,如图4所示。 图4 双线性插值示意图Fig.4 Schematic diagram of bilinear interpolation 假设已知函数f在Q11=(x1,y1)、Q12=(x1,y2)、Q21=(x2,y1)以及Q22=(x2,y2)这4 个点的值,如果要得到未知函数f在点P= (x,y)的值,那么,首先需要在x方向(即时间维度)进行两次线性插值,得到 再在y方向(即空间维度)进行一次线性插值,得到 综合起来就是双线性插值最后的结果: 2.1.2 Savitzky-Golay滤波器 Savitzky-Golay 滤波器(S-G 滤波器)是一种在时域内基于局域多项式最小二乘法拟合的滤波方法。它能减弱数据质量因素对时序数据的不利影响,既可以对噪声进行滤除,又可以保持波形的宽度和形状不发生变化[16],这些特性使得S-G滤波器非常适用于对事故影响时空区域的外围轮廓进行拟合。 如果设置S-G 滤波器窗口的宽度为2m+1,说明在窗口中存在2m+1 个数据。设这一组数据为x[i],i= -m,-m+1,…,0,…,m-1,m,i,且i的取值为整数,之后使用n阶(n≤ 2m+1)多项式f(i)来对这组数据进行拟合,公式如下: 拟合后的数据点与原数据点之间的残差平方和可以用下式表示: 想要得到最好的拟合结果,残差平方和应为最小,即E对该多项式的系数bnk的偏导应为0: 解得 当已知拟合的单边点数m、多项式的阶次n以及待拟合的数据x[i]时,即可求出该多项式。对应的窗口内的中心点估计值通过拟合出来的多项式来求取,而对于后面的点,通过不断地移动窗口重复上述操作即可。利用Python 的scipy 包中的savgol_filter 函数可以实现Savitzky-Golay 滤波拟合法。该函数有两个主要参数:window_length 和k。window_length 为窗口的长度,取值为奇正整数;k为拟合窗口内数据点多项式的阶数,其值应小于window_length的值。window_length的值越小,拟合后的曲线越贴近事故影响时空区域的外围轮廓的实际曲线;window_length值越大,事故影响时空区域的外围轮廓的曲线平滑效果越强。k值越大,拟合后的曲线越贴近事故影响时空区域的外围轮廓的实际曲线;反之,k值越小,曲线越平滑。 高速公路交通事故的影响是多方面的,在交通流三参数(速度、占有率和流量)中,若事故前后高速公路上车辆都较少,则流量指标不足以辨识事故前后的变化,那么可以明显观测到的交通流指标变化主要是车辆速度和占有率。因为可能有诸多其他因素(例如不同路段限速、司机驾驶习惯等因)的影响和干扰,故不应直接采用速度和占有率作为此类问题的度量指标,而速度的二级衍生指标能更好地消除这些因素带来的影响。与交通流的历史运行特征进行比较,可以更直观的通过相应指标量化交通事故影响产生的效应。在此,定义速度变化率为某地点在某时刻的速度相较于该时刻该地点的历史速度的变化率,以速度变化率作为评估指标来判断某地点在某时刻是否受到交通事故的影响,计算方法如下: 式中,Δv(d,t)为地点d在t时刻的速度变化率,vp(d,t)为地点d在t时刻的过往速度均值,vn(d,t)为高速公路交通事故发生后地点d在t时刻的速度的值。速度变化率越大,说明速度变化的幅度越大。如果速度变化率超过某一阈值,就判定该地点在该时刻受到了交通事故的影响。 一般来说,高速公路交通事故发生地的下游不会受到交通事故的影响,速度较事故发生前基本没有变化,所以只需要在事故发生地上游选择交通信息检测器即可。文中选择距离交通事故发生地最近的上游4个检测器,时间的选取根据实际情况来确定,用以计算事故发生后速度变化率的变化情况。 文中使用的交通流数据是以1 min 集计的,并且在地点上也只能得到4个检测器位置的交通流数据,无法获得更具体的时间和地点的速度变化率。基于此,应用双线性插值法实现速度变化率在时间和空间范围内的补全操作,以获得更为具体的时间和空间的速度变化率。 使用双线性插值法对速度变化率进行补全后,可以得到速度变化率轮廓图。速度变化率轮廓图不能直接用以计算事故时空影响的量化指标,需要选择合适的速度变化率阈值q来判断某地点在某时刻是否受到交通事故的影响。速度变化率大于阈值q意味着该地点在该时刻受到了交通事故的影响,速度变化率小于阈值q则意味着没有受到事故影响。根据阈值q来提取受到交通事故影响的时空区域,得到交通事故影响时空区域图后,提取轮廓图外围的各个点,然后使用Savitzky-Golay 滤波拟合法对这些点进行拟合,可得交通事故影响时空区域的外围轮廓,根据事故影响时空区域的外围轮廓图来计算各个事故时空影响评价指标。 文中选取3类指标对高速公路交通事故在上游的时空影响传播进行量化,分别是时间相关指标、空间相关指标以及速度指标。图5给出了各指标的计算示意。这3类指标都是在事故影响时空区域的外围轮廓图的基础上进行计算的[17]。下面对这3类指标的计算方法进行介绍。 图5 各量化指标的计算示意图Fig.5 Schematic diagram of the calculation of each quantita⁃tive index 2.4.1 时间相关指标 事故影响开始时间:文中定义事故影响开始时间为t0,即从t0时刻起,速度变化率开始超过阈值q,并在一段时间内都处于超过阈值q的状态。 事故影响结束时间:文中定义事故影响结束时间为t1,即从t0时刻起到t1时刻,速度变化率都保持在阈值q以上;t1时刻后,速度变化率开始低于阈值q,并且之后都保持在不超过阈值q的状态。 事故影响持续时间:文中定义事故影响持续时间为Δt,计算方式为事故结束时间t1与事故影响开始时间t0的差值,公式如下: 2.4.2 空间相关指标 事故影响最近距离:文中定义事故影响最近距离为l0,即在事故影响开始的t0时刻到事故影响结束的t1时刻这一时间范围内,与事故发生地相距最近的受到事故影响的地点到事故发生地的距离。 事故影响最远距离:文中定义事故影响最远距离为l1,即在事故影响开始的t0时刻到事故影响结束的t1时刻这一时间范围内,与事故发生地相距最远的受到事故影响的地点到事故发生地的距离。 事故影响空间范围:文中定义事故影响空间范围为Δl,计算方式为事故影响最远距离l1与事故影响最近距离l0的差值,即 2.4.3 速度指标 文中定义事故影响传播速度为v1,即在交通事故影响向上游传播的过程中,单位时间内事故影响距离的变化值。计算公式为 式中:Δt1为在交通事故向上游传播的过程中的某一时间间隔;Δl1为在Δt1这一时间间隔内,交通事故向上游传播的距离。 定义事影响传播速度为v2,即在交通事故影响消散的过程中,单位时间内事故影响距离的变化值: 式中:Δt2为在交通事故影响消散的过程中的某一时间间隔;Δl2为在Δt2这一时间间隔内,交通事故影响距离的变化值。 将前面的分析汇总,可得到高速公路事故时空影响动态效应传播分析流程,主要分为5个步骤。 步骤1选择高速公路交通事故上游距离事故发生地最近的4个交通流检测器,时间范围根据实际事故情况选择,观察、分析事故前后交通流检测器的速度变化。 步骤2计算选定的时间范围内各交通流检测器的速度变化率。 步骤3利用双线性插值法对速度变化率进行填充,得到更具体时间和空间范围内的速度变化率,绘制速度变化率轮廓图。 步骤4选择合适的速度变化率阈值q,根据阈值q来绘制受到交通事故影响的时空区域,并对其外围轮廓点进行提取;利用Savitzky-Golay 滤波拟合法对受到交通事故影响的时空区域外围轮廓点进行拟合,得到事故影响时空区域的外围轮廓图。 步骤5根据事故影响时空区域的外围轮廓图来计算各事故时空影响量化指标,包括时间相关指标、空间相关指标和速度指标,并对结果进行分析。 以京哈高速公路出京方向里程数为19.3 km 的张家湾附近发生的一起交通事故作为实例分析对象。该事故的发生时间是2013 年4 月18 日18 时02 分,事故起因为一辆大货和一辆小客车发生剐蹭,无人员伤亡,有路损和遗洒,此遗洒影响进京方向车辆,车辆行驶缓慢。距离事故发生地点最近的4个上游检测器编号分别为523050015、523050014、523050013 和523050012,其对应的距离事故点的里程数分别为0.300、1.316、2.500、3.700 km,如表3所示。 表3 事故上游检测器的位置信息Table 3 Location information of the upstream detectors 图6 给出了事故发生前3.5 h 和事故发生后4.5 h时,4个上游检测器以及距离事故地点最近的1 个下游检测器速度值的变化。可以看出,事故发生后,离交通事故地点最近的检测器1最先检测到速度的急剧下降,检测器2的速度值随后也出现下降趋势,检测器3 和4 处的速度值并没有出现较为明显的变化趋势。同时也可以看出,交通事故前后,距离事故地点最近的下游检测器的速度没有明显变化,说明交通事故对下游车辆的速度没有显著影响。 图6 事故前后的速度变化Fig.6 Speed change before and after the crash 由于计算速度变化率所需的历史速度均值数据量太过庞大,提取所有历史数据求取速度均值显然是不可行的,为此,随机抽取15 份相同检测器在相同时刻的历史速度数据来计算速度均值。例如,要计算检测器1 位置在18:00 的历史速度均值,就首先随机抽取15 个日期,假设抽取的日期为2013 年4 月1 日、2013 年1 月3 日、2013 年2 月9日、……,提取检测器1位置在这些日期18:00的速度,并计算其均值,该均值即为检测器1位置在18:00 的历史速度均值。根据历史速度均值即可计算出事故前后的速度变化率,如图7所示。 图7 事故前后速度变化率的折线图Fig.7 Curve chart of speed change rate before and after the crash 以时间为横轴、距事故发生地的距离为纵轴,并以颜色的深浅来表示速度变化率的大小,可以绘制出事故前后速度变化率的时空图,如图8所示。 图8 事故前后速度变化率的时空图Fig.8 Spatio-temporal diagram of speed change rate before and after the crash 利用双线性插值对速度变化率进行时间和空间范围内的填充。在纵向即空间范围内以1 m 为间隔、在横向即时间范围内以10 s为间隔对速度变化率进行填充,可以得到速度变化率轮廓图,如图9所示。通过速度变化率轮廓图可以得到检测器1到检测器4 的距离范围和14:35—22:35 时间范围内任意距离、任意以10 s 为间隔的时刻的速度变化率。 图9 速度变化率轮廓图Fig.9 Contour diagram of speed change rate 需要补充的是,由于文中最近只能获得距离事故地点300 m 的检测器1 的速度变化情况,而无法获得距离事故地点0~300 m 这一距离范围内的速度变化率(这是插值法的局限性所在,也是此类交通信息采集手段在该类问题中的缺陷),所以文中事故影响的最近距离为检测器1的位置,而非事故发生地。 速度变化率轮廓图不能直接用以计算事故时空影响量化指标,需选择合适的速度变化率阈值q,根据阈值q来提取受到交通事故影响的时空区域,并判断某地点在某时刻是否受到交通事故的影响。由图7可以看出,在交通事故发生前,速度变化率并非一直保持为零,多有大于零的情况发生,但总体上讲,速度变化率都是小于20%的。此外,其他相关研究基于不同数据集建模[17]并首选20%作为速度变化率阈值时,也取得了指标值量化值差异较为显著的结果,所以在此将20%作为速度变化率阈值的起点。文献[17]在讨论此类问题时将速度变化率阈值终点设置为0.4,而图9 的速度变化率轮廓图显示,40%所处的颜色为轮廓图的边缘位置,所以文中可以将40%作为速度变化率阈值的终点,并依据此类研究的惯例将10%设为速度变化率阈值的步长,以便于分析[17]。综上,取20%、30%和40%作为速度变化率阈值的取值,讨论不同阈值下的交通事故时空影响。下文以阈值取20%为例对分析过程进行具体阐述。 速度变化率阈值取20%,即如果某地点在某时刻的速度变化率大于20%,则该地点在该时刻被判断为受到了交通事故的影响;如果小于20%,则被判断为没有受到交通事故的影响。提取受到交通事故影响的时空区域,如图10所示。 图10 交通事故影响的时空区域Fig.10 Spatio-temporal region affected by traffic crashes 对交通事故影响时空区域的外围各个点进行提取,可以得到图11(a)。借助Python 中scipy 包的savgol_filter 函数可以实现Savitzky-Golay 滤波拟合法,对受到交通事故影响的时空区域的外围点进行拟合,其中window_length 取71,k值取3,从而可以得到图11(b)。 图11 拟合前后的交通事故影响时空区域外围情况Fig.11 Peripheral and the outer contour of the spatio-temporal region affected by the crash before and after fitting 根据以上过程,可以得到不同速度变化率阈值(20%、30%、40%)下事故影响时空区域的外围轮廓图,在此基础上可以得到事故时空影响的各个量化指标,包括事故影响开始时间、事故影响持续时间、事故影响最近距离、事故影响最远距离和事故影响空间范围,结果如表4所示。 表4 不同阈值下的事故时空影响量化指标结果Table 4 Results of quantification index of spatio-temporal im⁃pact of crashes under different thresholds 图12(a)给出了速度变化率的阈值取20%时的结果。如果事故影响传播速度为正,说明事故影响在向上游传播;如果事故影响传播速度为负,说明事故影响正在消散。在18:05:10时刻,也就是事故发生3.17 min后,事故影响开始传播到交通事故地点上游第1个微波雷达信息检测器,之后事故影响的传播速度开始减弱至接近0.2 m/s。从18:11:50起,事故影响的传播速度有微弱回升,并开始出现波动,但一直处于大于0 m/s 的状态,说明事故影响一直在向上游进行传播。在18:43:20—18:47:30这个时间段内,事故影响的传播速度下跌至0 m/s以下,事故影响出现短暂消散倾向。之后,事故影响传播速度在[-1,1]m/s 之间上下波动。21:10:10为集结波和消散波的交汇点,在此之后,也就是事故发生后188.17 min,事故影响传播速度开始保持在小于0 m/s 的状态,即事故影响开始消散;直到21:34:00,事故影响基本结束。 图12(b)描述了速度变化率的阈值取30%时的结果。如果事故影响传播速度为正,说明事故影响在向上游传播;如果事故影响传播速度为负,说明事故影响正在消散。在18:07:30 时刻,也就是事故发生5.50 min后,事故影响开始传播到交通事故地点上游第1个微波雷达信息检测器,之后事故影响的传播速度开始减弱至接近0 m/s。从18:12:30起,事故影响的传播速度有微弱回升,并稳定在0.27 m/s 左右,直到18:31:50。在18:42:30—18:45:00这个时间段内,事故影响的传播速度下跌至0 m/s 以下,事故影响出现短暂消散倾向。在这之后,事故影响传播速度在[-1,1]m/s 之间上下波动。21:10:20为集结波和消散波的交汇点,在此之后,也就是事故发生188.33 min后,事故影响传播速度开始保持在小于0 m/s 的状态,即事故影响开始消散;直到21:28:10,事故影响基本结束。 图12 不同速度变化率阈值下的事故影响传播速度变化Fig.12 Change of crash impact propagation speed at various speed change rate thresholds 图12 (c)为速度变化率的阈值取40%时的结果。如果事故影响传播速度为正,说明事故影响在向上游传播;如果事故影响传播速度为负,说明事故影响正在消散。在18:08:50 时刻,也就是事故发生6.83 min后,事故影响开始传播到交通事故地点上游第1个微波雷达信息检测器,之后事故影响的传播速度开始下降,在18:12:00—18:13:40、18:24:40—18:26:10、18:32:50—18:34:20 以及18:42:30—18:44:20 这4 个时间段内,事故影响的传播速度下跌至0 m/s以下,事故影响出现短暂消散倾向。之后,事故影响传播速度在[-0.6,0.6] m/s之间上下波动。21:10:20 为集结波和消散波的交汇点,在此之后,也就是事故发生188.33 min 后,事故影响传播速度开始保持在小于0 m/s 的状态,即事故影响开始消散;至21:23:30,影响基本结束。 由表4可以看出,速度变化率的阈值越小,事故影响开始的时间就越早,事故影响结束的时间就越晚,事故影响持续时间就越长,事故影响的距离也越长。反之,速度变化率阈值越大,事故影响开始的时间就越晚,事故影响结束的时间就越早,事故影响持续时间就越短,事故影响的距离也越短。从事故影响传播速度变化图来看,不同的速度变化率阈值下,事故影响的传播速度在时间维度的发展态势各有不同,但其产生的集结波和消散波所匹配得到的交汇点所处的时间相差并不大。这样的结果验证了文中所提出的方法的可靠性。 文中通过对高速公路交通事故时空影响动态效应的传播分析,得到如下主要结论。 1)速度变化率的阈值越小,高速公路交通事故影响开始的时间就越早,事故影响结束的时间就越晚,事故影响的距离就越长;反之,速度变化率阈值越大,交通事故影响开始的时间就越晚,事故影响结束的时间就越早,事故影响的距离就越短。 2)不同的速度变化率阈值下,高速公路交通事故影响的传播速度随时间的变化趋势存在差异,但集结波和消散波的交汇点所在的时间相差无几,这进一步验证了文中所提出的方法的可靠性。 3)文中所构建的方法计算操作便捷、结果分辨率高,在高速公路安全管理工作中,可基于该方法明确交通事故传播的时空特征;在交通事故发生后,可通过主动调控并设置合适的交通引导信息,来降低二次事故发生风险并减少拥堵时间。 文中应用了微波雷达交通信息检测器采集的交通流数据,其动态交通特征并不全面。后续研究中,可通过视频检测器等获得车辆的变道行为和跟驰行为等参数,或者基于真实驾驶数据采集车辆的加速度、车头时距等参数,完善建模输入的信息。

2.2 事故时空影响传播分析指标的选取
2.3 轮廓图构建
2.4 事故时空影响量化指标

2.5 分析流程设计
3 算例分析

3.1 事故前后速度变化率分析
3.2 速度变化率轮廓图的绘制


3.3 事故影响时空区域外围轮廓图的提取

3.4 结果分析与讨论

4 结论
