全液压牙轮钻机可移动液压动力装置的设计
2023-02-28韩家威
韩家威
(安百拓(南京)建筑矿山设备有限公司露天事业部,江苏南京 210033)
0 前言
全液压牙轮钻机一般应用于大型煤矿、水泥矿、铁矿、金矿等露天矿山的爆破孔钻孔作业。目前,按动力源形式可分为两大类:(1)由高压电动机驱动的电动全液压牙轮钻机;(2)由大排量柴油机驱动的柴动全液压牙轮钻机[1-3]。
出于节能、减排、降噪等多方面的考虑,电动全液压牙轮钻机在大型露天矿的应用越来越广泛。一般,这种电动钻机是由6 kV 以上的高压电提供电能,由电动机带动分动箱和液压泵组旋转,输出液压能实现钻机行走或钻孔作业。在矿区现场,为了提供高压电,沿矿坑周围各层钻孔平台和矿区道路上铺设大量高压电线杆和高压电接口。当电动钻机在钻孔平台作业时,钻机电缆与高压电线杆上的高压电接口连接。当电动钻机需要转移作业平台或有其他转移需求时,需要远距离行走。钻机携带的电缆长度有限(通常为300 m),因此电缆用完时需要停机,等待高压电作业人员将高压电缆从上一个高压电接口断开,拖拽到下一个高压电接口处进行连接,然后再次开机行走。以上过程反反复复,直至钻机移动至指定位置。
从以上描述可以看出,电动钻机在远距离行走时效率非常低下。频繁断开、连接高压电接口危险性极高。高压电缆质量大,在转移高压电接口时,需要人工挪动,费时费力。
此外,若出现发动机故障、液压泵组建立不了压力等问题时,无论电动钻机还是柴动钻机,都无法及时转移场地。这在某些地区特别是极寒地区,是不允许发生的。
针对以上两类问题,行业内并无普适的解决方案。因此,亟须开发一种可移动液压动力装置,既可实现电动钻机的远距离不间断行走,也可满足两类钻机故障时的转移场地需求。本文作者将首次对此进行研究。
1 全液压牙轮钻机液压系统
如图1所示,全液压牙轮钻机的液压系统可分为三大部分:(1)提供动力给钻孔和行走的主液压系统,包含两台主泵、左主泵控制进给油缸和左行走马达、右主泵控制动力头回转马达和右行走马达;(2)提供动力给辅助执行机构的辅助液压系统,由一台辅助泵控制多路阀及与之连接的油缸和液压马达;(3)提供动力给风扇的散热液压系统,由一台风扇泵驱动和控制阀组控制风扇马达。主液压系统有开式系统和闭式系统2种,目前闭式系统的应用更加广泛[2-3]。原因主要有两点:(1)闭式液压系统的节能性更好;(2)牙轮钻机主液压系统的最大流量通常在220 L/min 以上,而辅助液压系统的最小流量通常在 40 L/min左右,两者流量差异太大,很难设计一个多路阀实现两者功能的集成。

图1 全液压牙轮钻机液压系统原理Fig.1 Principle of hydraulic system of full hydraulic rotary blasthole drill
当牙轮钻机进行钻孔作业时,图中4个液控换向阀的X油口通入控制油,工作在右位。左主泵即可控制进给油缸的伸缩、对应钻头及钻杆的下压和上提。右主泵控制动力头回转马达的旋转,对应钻头及钻杆的正转和反转。辅助泵则配合实现调整塔架姿态、吊钻杆、装钻杆、卸钻杆等辅助动作。
当牙轮钻机停止钻孔即转移场地时,需要先用辅助液压系统将各个辅助执行机构复位至非工作状态,并将钻机调整至行走姿态。然后,液控换向阀的Y油口通入控制油,工作在左位。左主泵即可控制左行走马达的旋转,右主泵则控制右行走马达的旋转,对应钻机的前进和后退。
2 可移动液压动力装置系统方案设计
2.1 总体系统设计
根据前述内容,为实现钻机转移功能,可移动液压动力装置至少应包含两大功能:(1)给钻机主液压系统提供动力,实现钻机远距离行走,称之为行走模式;(2)给钻机辅助液压系统提供动力,实现钻机行走前的姿态调整,称之为救援模式。
除了上述两大功能,可移动液压动力装置还应包括给自身液压系统和发动机提供散热功能的液压散热系统,如图2所示。

图2 可移动液压动力装置总体系统方案
2.2 行走动力系统设计
如图3所示,可移动液压动力装置包含2台主泵,分别代替钻机上的2台主泵,驱动钻机行走马达工作。如何将行走动力系统可靠地介入钻机液压系统,而不影响钻机自身工作是此处设计的关键[4-5]。钻机上的2台主泵既作为钻孔泵又作为行走泵。因此,应将行走动力系统的液压动力接至近行走马达端,而不是近钻机主泵端,否则将对钻机钻孔功能产生不确定影响。
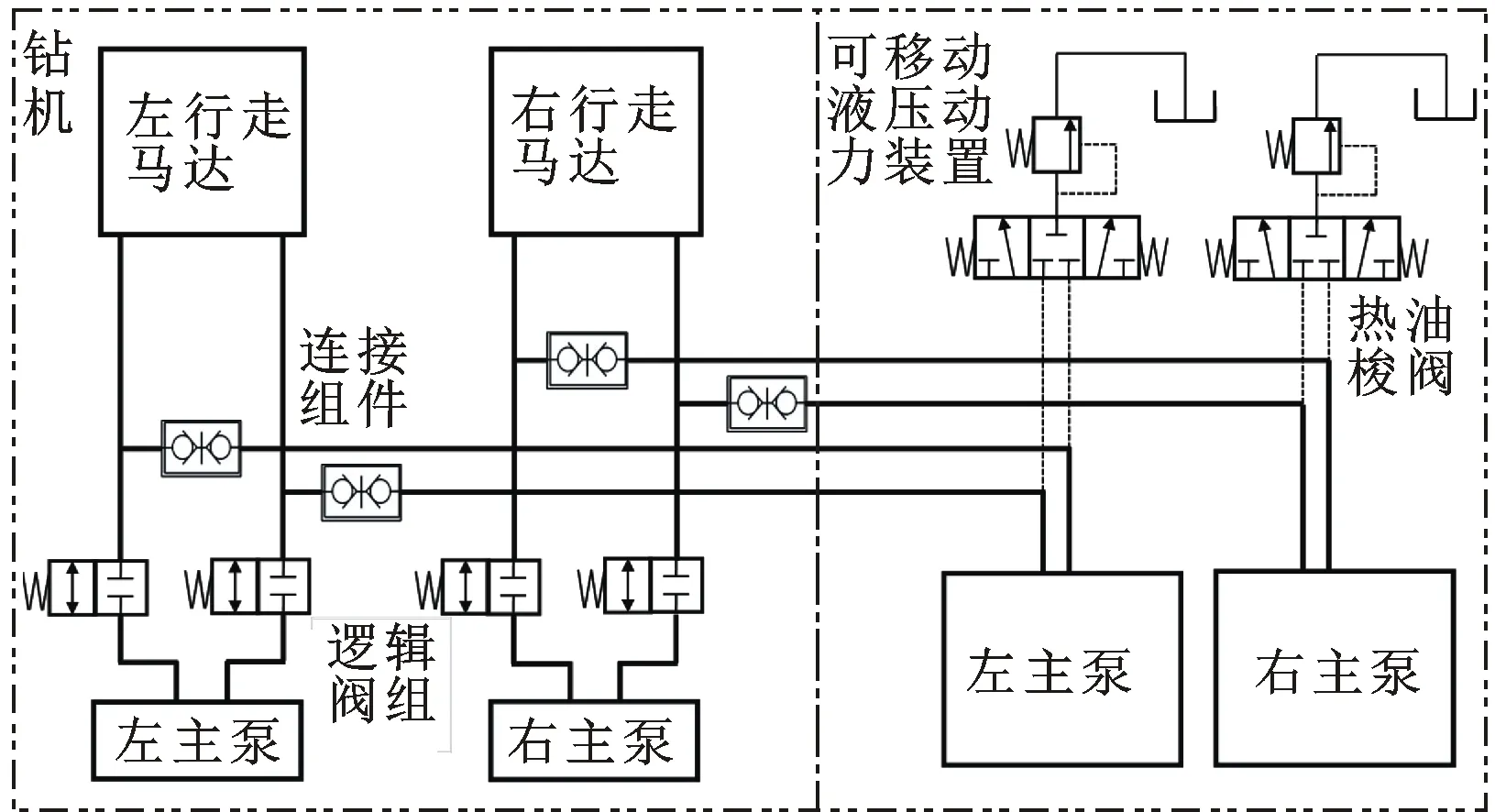
图3 行走动力系统方案Fig.3 Scheme of travel mode system
为避免串油或对钻机主泵造成损坏,采用性能可靠的液控逻辑阀组,分隔钻机主泵油路与可移动液压动力装置的主泵油路。
2.3 辅助动力系统设计
如图4所示,辅助动力系统由液压和电气两部分组成。液压部分主要包括1台辅助泵和2个两位三通液控换向阀。

图4 辅助动力系统方案Fig.4 Scheme of auxiliary power system
与常规液压系统相比,该部分的特殊之处在于辅助泵有2个液压油箱:1个是可移动液压动力装置自带油箱,另1个是钻机油箱。当钻机可以正常工作时,两位三通换向阀工作在右位,辅助泵从自带油箱吸油,排出的液压油经散热、过滤后回到油箱。当钻机无法正常工作时,两位三通换向阀工作在左位,辅助泵从钻机油箱吸油,排出的液压油到达钻机多路阀的进油口,驱动钻机辅助执行机构动作。
为不影响钻机操作感受,可移动动力装置设计有供电系统,给钻机驾驶室供电,确保在任何情况下都可以使用驾驶室内的电控手柄对多路阀进行操控[6-7]。
图5所示为可移动液压动力装置较详细的液压系统原理。
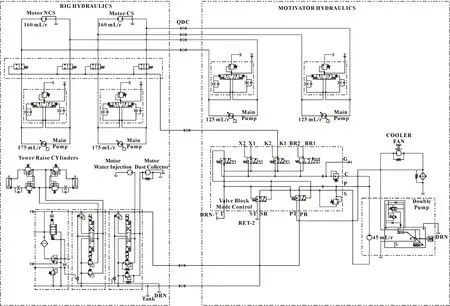
图5 可移动液压动力装置液压系统原理Fig.5 Hydraulic system principle of mobile hydraulic power device
3 快速连接系统
可移动液压动力装置作为一种钻机辅助工作设备,需要经常与钻机液压系统进行连接或断开。当数量较多的液压软管充满液压油时,连接过程难免耗时耗力。
概念设计时采用图6所示的快插接头连接系统。快插接头避免了使用扳手安装,大大节省了连接时间。但最终设计完成的可移动液压动力装置有14路液压软管,加上电气和机械部分的连接过程,整个连接过程预计将耗时30 min。

图6 快插接头连接系统Fig.6 Quick disconnect coupling system
为进一步提高效率,减少人力负担,最终样机采用图7所示的组合板连接系统,整个连接过程不超过10 min。除了省时省力,组合板连接系统还有以下优点:(1)可以集成电气接口,进一步简化了连接过程;(2)具有专门的锁定结构,更加安全可靠;(3)更容易解决非工作时段如何停靠、如何防尘的难点。

图7 组合板连接系统Fig.7 Quick disconnect coupling plate system
4 仿真分析
针对救援模式液压系统的特殊性,在Automation Studio中建立图8所示的仿真模型进行分析[8-10]。在软件中设置液压系统各元件的相关参数如下:32号低温液压油,油箱落差为2 m,软管内径为31.8 mm,L1/L2/L3软管长度分别为1、4.5、4 m,辅助泵排量为20 mL/r,快插接头和换向阀的参数按照样本曲线设置。
仿真结果如图9所示,当辅助泵转速为2 686 r/min时,吸油压力变化区间为-0.102 ~ -0.071 MPa。很明显,任何液压泵在这种情况下都无法工作。由于辅助泵排量已经很小,油箱高度无法调整,软管长度无法缩短,改善吸油压力只能从以下几方面着手:(1)增大软管内径;(2)加大快插接头尺寸;(3)降低辅助泵转速;(4)增大换向阀规格。前两者都会加大安装难度。

图8 辅助动力系统仿真模型-1Fig. 8 Simulation model 1 of auxiliary power system

图9 辅助泵吸油压力曲线-1Fig. 9 Oil suction pressure curves 1 of auxiliary pump
如图9所示,当辅助泵转速降至1 268 r/min时,吸油压力变化区间为-0.102~-0.005 MPa。此转速下,液压油温高于15 ℃时可以满足液压泵正常吸油压力。
进一步建立采用2个换向阀的模型如图10所示,仿真结果见图11。当辅助泵转速为2 686 r/min时,吸油压力变化区间为-0.102~-0.021 MPa,液压油温高于30 ℃时可以满足液压泵正常吸油压力。当辅助泵转速降至1 268 r/min时,吸油压力变化区间为-0.102 ~ 0.005 MPa,液压油温高于0 ℃即可满足液压泵正常吸油压力[11-12]。

图10 辅助动力系统仿真模型-2Fig.10 Simulation model 2 of auxiliary power system

图11 辅助泵吸油压力曲线-2Fig.11 Oil suction pressure curves 2 of auxiliary pump
考虑仿真分析会有偏差,因此,最终采用的方案是:将辅助泵的工作转速限定在1 000 r/min,采用2个换向阀,并要求油温高于20 ℃。
5 整机验证
实际完成的可移动液压动力装置如图12所示。在功能调试后进行了测试验证,由于场地限制,测试数据在支腿油缸将履带撑离地面的情况下采集[13-15]。

图12 可移动液压动力装置Fig.12 Mobile hydraulic power device
行走模式的测试曲线如图13所示。根据测试曲线,左主泵A油口和右主泵B油口的工作压力在6 MPa上下波动,波动范围4.5~7.5 MPa,意味着左侧履带向前、右侧履带向后同时旋转。左主泵B油口和右主泵A油口的压力都在2.5 MPa附近小幅波动,这与闭式泵低压侧的压力值相符。

图13 行走模式测试曲线Fig.13 Travel mode test curves
救援模式的测试曲线如图14所示。根据测试曲线,在2:05~2:15 min时间段,辅助泵空载旋转,辅助泵吸油口的压力在-0.02 MPa附近波动,满足开式泵的吸油压力要求。在2:15~2:25 min时间段,辅助泵工作在18 MPa,辅助泵吸油口的压力稳定在-0.02 MPa,满足开式泵的吸油压力要求。

图14 救援模式测试曲线Fig.14 Rescue mode test curves
6 结论
(1)设计了一种可移动液压动力装置,彻底解决了电动全液压牙轮钻机远距离行走效率低下的行业顽疾。
(2)设计了快速连接系统,大大提高了可移动液压动力装置的使用效率。
(3)集成了救援模式与行走模式,在解决行走问题的同时兼顾了辅助功能。
(4)解决了全液压牙轮钻机因各类故障而无法及时转移场地的难题。
