基于改进自抗扰控制器的磁浮列车速度跟踪控制研究
2023-02-24王盼盼杨杰邹吉强刘鸿恩
王盼盼,杨杰, ,邹吉强, ,刘鸿恩,
(1. 江西理工大学 电气工程与自动化学院,江西 赣州 341000;2. 江西理工大学 江西省磁悬浮技术重点实验室,江西 赣州 341000;3. 国瑞科创稀土功能材料(赣州)有限公司,江西 赣州 341000)
我国磁浮列车发展迅速,目前已有上海高速磁浮线、长沙磁浮快线、北京磁浮线(S1号线)处于商业运营模式。2021年1月,世界首台高温超导高速磁浮工程化样车及试验线在西南交通大学正式启用,同年12月,江西理工大学牵头研发的国际首辆永磁悬浮列车(红轨“兴国号”)顺利下线,如图1所示。针对磁浮列车和高速轮轨列车的速度跟踪控制问题,国内许多学者对此展开了相关研究,CAO等[1]针对中速磁浮列车的速度跟踪问题,提出分数阶比例-积分-微分控制器(Proportion-Integral-Derivative Controller,PID),并利用粒子群算法对该控制器参数进行寻优,最后通过仿真实验验证了该控制策略的有效性,结果表明分数阶PID控制器能够有效提高列车的跟踪精度。杨光[2]针对高速磁浮列车运动学模型的非线性特性,将反馈线性化技术与PI控制器相结合作为高速磁浮列车的速度跟踪控制策略,仿真结果表明此方法能够使列车很好地跟踪目标速度曲线,且系统具有良好的鲁棒性。严细辉[3]针对CRH380AL型动车组的速度跟踪控制问题,建立了列车的多质点模型,提出模型预测控制与PID相结合的双模控制策略,仿真结果表明该控制策略能够提高列车的跟踪精度。谭畅等[4]针对CRH380AL型列车制动系统的参数不确定性和输入时滞问题,提出模型参考自适应控制策略,仿真结果表明该控制策略实现了列车对目标速度的渐进跟踪,提高了列车的制动性能和运行的平稳性。吉鸿海[5]针对高速列车速度跟踪系统结构的非线性和系统参数的不确定性,提出改进自适应迭代学习控制算法,仿真结果表明该算法能够有效解决有限时间区间高速列车的速度跟踪控制问题。李中奇等[6]针对列车运行过程中受到未知干扰的问题,提出基于H∞控制器匹配的广义预测控制策略,仿真结果表明该控制策略使列车即使在参数突变运行工况下仍具有较高的跟踪精度、良好的抗干扰能力和很好的鲁棒性。宋琦等[7]针对高速列车速度跟踪系统参数和外界阻力的不确定性,提出一种自适应控制方法,仿真结果表明该控制策略能够克服列车在运行过程中所受未知外界阻力的不利影响。YANG等[8]针对高速列车运动过程的非线性特性,提出T-S模糊双线性列车运动学模型和自适应预测控制器,采用惰行学习算法在线调整列车运动学模型和控制器参数,仿真结果表明该方法能够提高列车的跟踪精度。自抗扰控制器(Active Disturbance Rejection Controller,ADRC)自被韩京清提出,因其优秀的控制性能已被广泛运用于各领域[9-10],国内外众多学者仍在改进其调参方法,探索该控制器在时滞系统方面的应用,GAO[11]于2003年提出线性化方案,极大简化了ADRC的调参过程;2020年,YAO等[12]针对多轴同步问题将ADRC与滑模控制相结合,推导出串联自抗扰控制,并提出一种简单整定控制器参数的方法。2014年,ZHAO等[13]提出一种基于时滞系统的改进ADRC结构。2020年,ZHANG等[14]针对系统的时滞问题,通过将ADRC与史密斯预估控制相结合,提出一种基于内模原理的参数整定方案。由此看来,针对时滞问题的ADRC控制结构的改进和参数的整定方法值得深入研究。近年来,自抗扰控制在列车的速度跟踪控制系统方面的应用受到了国内学者的广泛关注。龙志强等[15]根据磁浮列车轨道线路约束条件以及乘坐舒适性要求,提出利用ADRC进行自动驾驶控制,并通过仿真分析得出,ADRC算法是一种适合磁浮列车运行控制系统要求的算法。WANG等[16]基于货运列车模型设计了非线性自抗扰控制器算法,并利用人工蜂群算法进行调参,在一定程度上降低了调参的难度。针对高速列车在复杂环境下控制器跟踪误差问题,连文博等[17]提出了基于ADRC控制器的高速列车自动驾驶速度控制策略,并利用CRH380A型列车参数进行仿真验证了自抗扰控制在高速列车速度跟踪控制问题的适应性,具备抗干扰性强及追踪误差小等性能优势。无论是磁悬浮列车运控问题还是高速铁路运控问题,ADRC控制均表现出良好的性能优势,也为本文提供了一定的技术参考。本文在团队对自抗扰控制和磁浮列车的前期研究的基础上[16,18],针对磁浮列车速度跟踪控制系统的大时滞特性,提出一种基于改进自抗扰控制器(Time-Delay-ADRC,TD-ADRC)的控制策略,并通过传递函数等效方法,提出FOPTD模型,并基于此模型,给出了自抗扰控制器的调参方法。最后在MATLAB仿真平台上分析了此算法相对于其他2种算法的优势。

图1 红轨-“兴国号”Fig. 1 Red Rail-“Xingguo”
1 磁浮列车速度跟踪控制模型基础
1.1 磁浮列车运动学模型描述
磁浮列车受力状态简要可归纳为车辆牵引力、制动力和运行阻力三大部分组成。其中,牵引力与制动力,具有非同时性。运行阻力可包括基本阻力与附加阻力。基本阻力又涵盖了空气阻力、车载直线发电机引发的运行阻力和导向轨上的电磁涡流阻力等;附加阻力分为坡道附加阻力和隧道附加阻力,本文仅考虑坡道附加阻力。下面介绍列车的具体的阻力计算公式。
1) 基本阻力
磁浮列车的基本阻力由空气阻力、车载直线发电机引发的运行阻力和线路两侧导向轨上的电磁涡流阻力阻力3部分组成[19],以上海高速磁浮列车为例,三者的计算方法如下[2]。
1) 空气阻力:空气阻力的大小与磁浮列车的最大截面积、空气密度和列车表面形状等有关,与列车的运行速度有关,可用式(1)表示:
式中:Fa为空气阻力,kN;ν为列车行驶速度,m/s;N为列车编组数。
2) 直线发电机引发的运行阻力:由直线发电机引起的运行阻力与列车的行驶速度和编组车辆数有关,其大小可表示为:
式中:Fc为直线发电机引发的运行阻力,kN;ν为列车速度,m/s;N为列车编组数。
3) 导向轨上的电磁涡流阻力:涡流阻力的大小与磁浮列车的运行速度和车辆编组有关,其表达式为:
式中:Fm为电磁涡流阻力,kN;N为车辆编组数;ν为列车速度,m/s。
2) 附加阻力
附加阻力主要是由于磁浮列车的运行线路情况而造成的额外阻力,线路信息是磁浮列车控制的基础数据,包含各个路段的限速情况,弯道、隧道、坡道等,本文仅考虑由于坡道而产生的坡道附加阻力。
坡道附加阻力有正负之分,当磁浮列车在下坡道运行时,坡道附加阻力为磁浮列车提供动力,此时数值为负;当磁浮列车在上坡道运行时,坡道附加阻力,数值为正,可表示为:
式中:fg为坡道附加阻力,kN;i为坡道的坡度千分值;m为列车总质量,t;g为重力加速度。
综上所述,磁浮列车在运行时受到的总阻力可用式(5)表示。
式中:Fr为列车在运行时受到的总阻力。
综上,在运行过程中,将磁浮列车视为单质点模型,并满足牛顿第二定理,可用式(6)表示。
式中:x为磁浮列车的位移;ν为磁浮列车运行速度;Fp为磁浮列车所受牵引力;Fb为磁浮列车所受制动力;Fr为磁浮列车所受阻力;m为磁浮列车总质量。
在磁浮列车自动运行时,其控制系统中的牵引制动控制器根据目标速度曲线数据、线路信息发送牵引或制动指令,并通过牵引控制系统或制动控制系统使执行器输出牵引力或制动力,在整个过程中存在一定延时性,建立控制模型如图2所示。
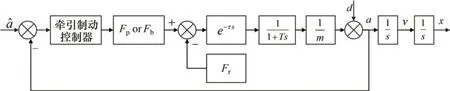
图2 磁浮列车牵引制动模型框图Fig. 2 Block diagram of maglev train traction and braking model
1.2 TD-ADRC控制器设计
韩京清[20]提出的自抗扰控制器由跟踪微分器、非线性状态误差反馈控制律和扩张状态观测器组成,其控制结构如图3所示。

图3 常规2阶自抗扰控制框图Fig. 3 Block diagram of conventional second order active disturbance rejection control
1) 跟踪微分器
如图3所示,在常规ADRC中,跟踪微分器输出目标曲线(ν)的跟踪曲线(ν1)和目标曲线的微分(ν2),其内部函数可设计为式(7)。
式中:函数fhan(x1,x2,r,h0)为最速控制综合函数[20],具体表达式见式(8)。ν(k)为跟踪的输入,ν1(k)与ν2(k)为跟踪微分器的输出,h为积分步长,h0为适当大于h的参数,作用是防止ν1(k)产生超调现象。
式中:r为跟踪速度因子,r越大,则ν1(k)跟踪ν(k)的速率越快,精度越高;反之则表示速率更慢、精度更低。
在常规ADRC控制器中,跟踪微分器的设计有着至关重要的作用,即能够在一定程度上减小系统输出的超调量。但是常规ADRC对时滞系统的控制效果不是很好,本文在此基础上,添加反馈通道和时滞环节,提出TD-ADRC控制器,结构如图4所示。

图4 TD-ADRC控制器结构框图Fig. 4 Block diagram of TD-ADRC
与常规的ADRC控制器中的跟踪微分器不同的是,TD-ADRC控制器中的跟踪微分器的输出只需要目标曲线的微分,如图4所示,图中,νˉ为磁浮列车的目标速度曲线,r为跟踪微分器的输出,即列车的目标加速度â,y为系统输出,即列车的实际加速度a。
2) 扩张状态观测器(Extended State Observer,ESO)
扩张状态观测器(Extended State Observer,ESO)的作用是由输出观测扰动,并将其扩张成为新的状态变量,此过程不需要分析扰动的具体作用,只需将扰动实时观测出来从而结合误差反馈控制律进行消除扰动,控制器的控制效果很大程度上取决于ESO的实时观测效果。TD-ADRC中的ESO的结构可用式(9)表示。
式中:e为系统的输出误差;z1为对系统输出的观测估计;z2为对系统总扰动的观测估计;y为系统的输出;β1和β2为ESO的可调参数。
3) 误差反馈控制律
TD-ADRC的实际控制量u可设计成式(10),虚拟控制量u0可设计成式(11)。
式中:b0为控制器的可调参数。
式中:r为系统输入,即列车的目标加速度â;y为系统输出,即列车的实际加速度a。
2 TD-ADRC调参方法
2.1 模型等效
为了更好地消除磁浮列车具有时滞问题,本文基于式(9)将TD-ADRC结构中的ESO进行分解,得出ESO的传递函数如式(12)和式(13)。
式中:Z(s)为ESO的输出;Y(s)和U1(s)为ESO的输入。
结合图4,将式(12)与式(13)代入ESO中,可得出输入u0至输出y的传递函数,如式(14)所示,对其在低频域进行近似分析等效,进一步得到近似理想闭环传递函数,从而消除时滞环节带来的系统不稳定性问题,保证磁浮列车速度跟踪控制系统的稳定性。
在低频域,对式(14)所示传函进行近似等效可得:
通过式(15)可以看出,由式(14)得到u0→y的近似传递函数可以看作为FOPDT模型(积分环节和时滞环节的乘积),其中增益记作ka,如式(16)所示。结合图4,可得控制系统的近似理想闭环传递函数如式(17)所示。
对式(17)分母中的时滞环节进行1阶泰勒展开得到式(18),得到理想闭环传递函数形式。
2.2 参数调节方法
SKOGESTAD[21]对带有时滞环节的1阶对象的控制进行了研究,分析了PID控制器的参数调节方法,并经过仿真得出当1阶系统的时间常数等于时滞环节的时滞时间时,系统具有良好的输出响应和很好的鲁棒性。本文受此启发,通过调节系统的时间常数和时滞环节的时滞时间的关系来制定参数调节方法。
为了表达简洁,式(18)中λ可以记作式(19)。

图5 TD-ADRC参数调整过程Fig. 5 Parameter adjustment process of TD-ADRC
结合式(16)和式(19),可以得到kp的表达式如式(20)。
当λ=1时,系统的输出能够很好地跟踪输入[21]。同时,系统拥有良好的鲁棒性和抗干扰性,调试过程中,也可在其周围进行搜索。具体调参方法如下:当给定参数λ时,通过调整参数β1与β2的值,进而确定ka的值,最后确定kp的值,根据系统的输出特性不断改变λ的值,以此程序循环。具体算法如图4所示。
2.3 小结
本章节通过分解ESO,计算出控制系统的开环传递函数,并通过低频域等效的方法将系统的开环传递函数等效成FOPDT模型,从而得出理想闭环传递函数形式,并据此闭环传递函数形式,提出相应的调参策略。该调参策略有以下优点:
1) 简化了控制系统模型,使手动调参更方便。
2) 计算得出参数间的等量关系,减少了需要整定的参数个数,大大降低了手动调参的难度。
3 仿真分析
结合列车运控模型理论分析,本文设计基于TD-ADRC控制器的磁浮列车速度跟踪控制系统模型,如图6所示,包括磁浮列车的牵引(制动)模型、磁浮列车速度响应模型和阻力模型[18],并在Simulink环境下构建模型如图7所示,牵引制动模块如图8所示。

图6 磁浮列车速度跟踪控制系统原理框图Fig. 6 Principle block diagram of maglev train speed tracking control system
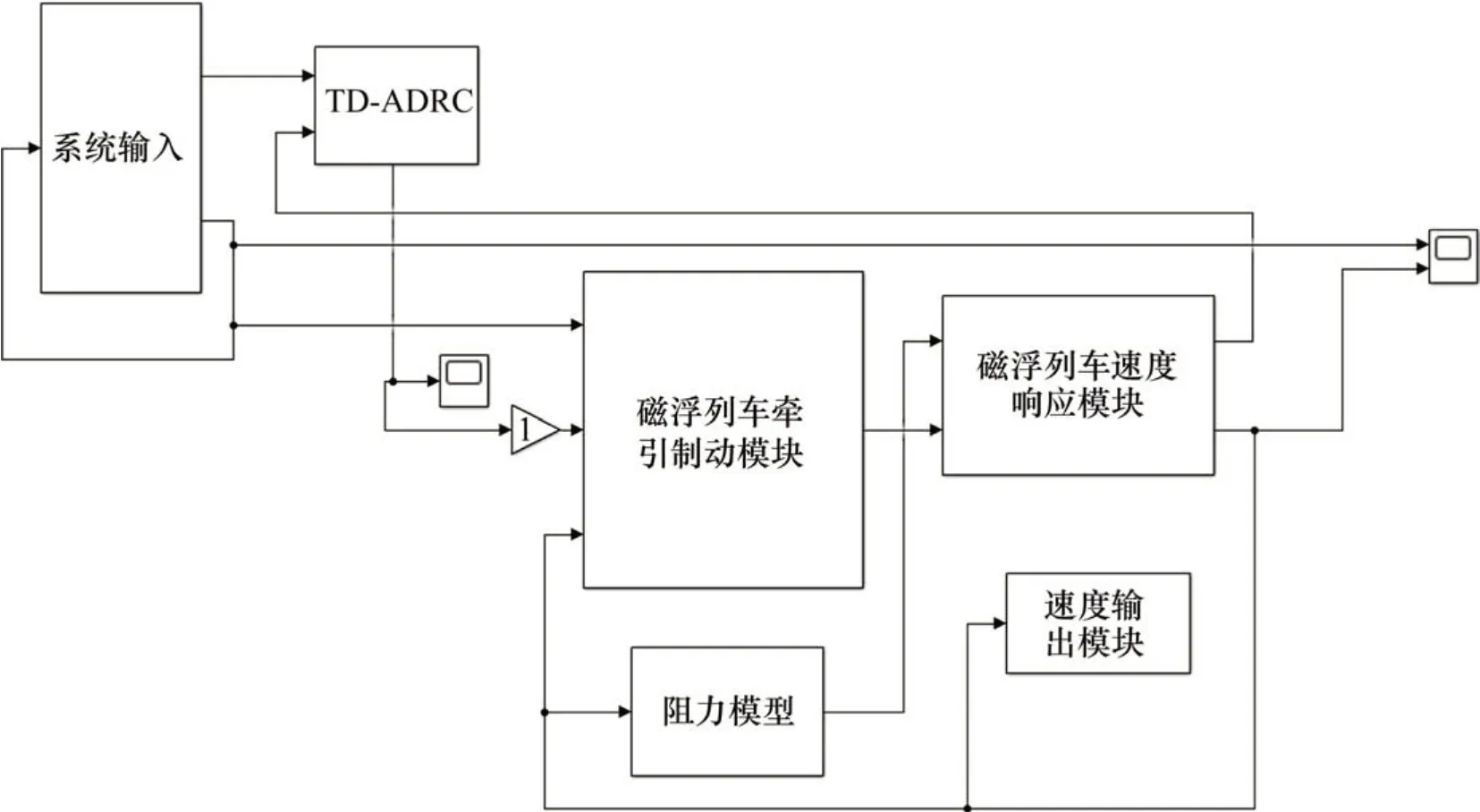
图7 磁浮列车速度跟踪控制模型Fig. 7 Speed tracking control model of maglev train
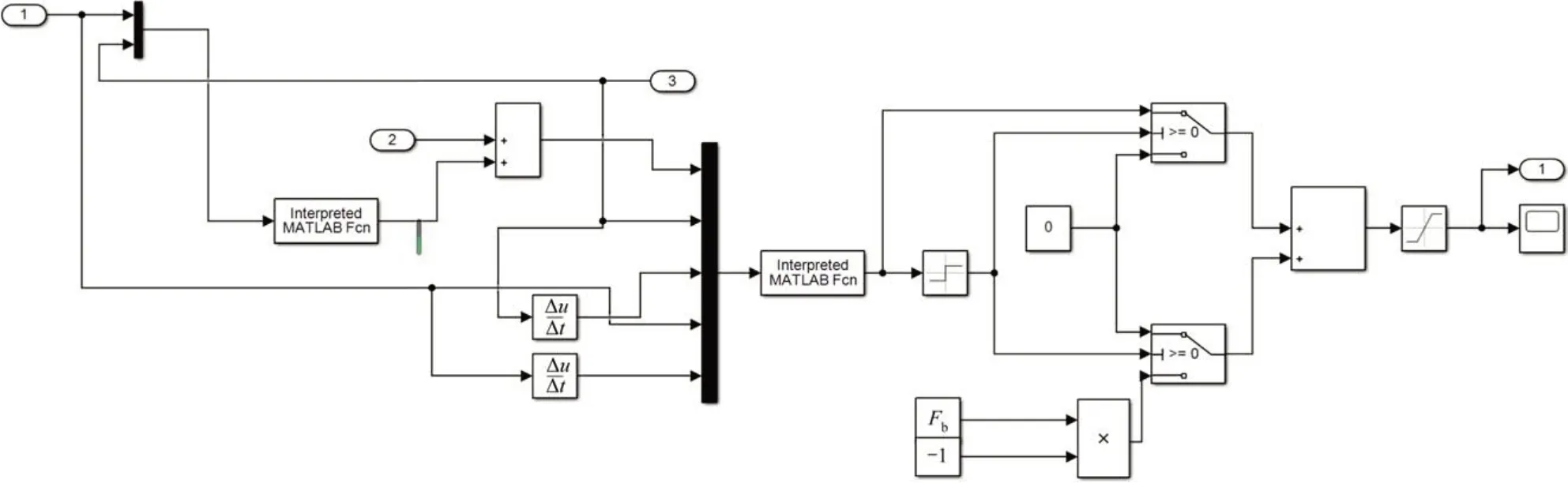
图8 磁浮列车牵引制动模块Fig. 8 Traction brake module of maglev train
第一,为了验证所构建的系统的跟踪性能,设计系统的输入信号为10+0.1sin(t),系统的输出如图9所示,误差如图10所示。
从图9和图10可以看出,整体上,系统的输出能够很好地跟踪目标曲线。细节上,1) 在目标曲线上升段,系统能够很好地跟踪正弦输入信号,误差较小;2) 而在下降段,系统则会产生相对较大的误差,但所产生的误差的数量级均在[-0.005,0.005]范围之内,表现出良好的跟踪性能。
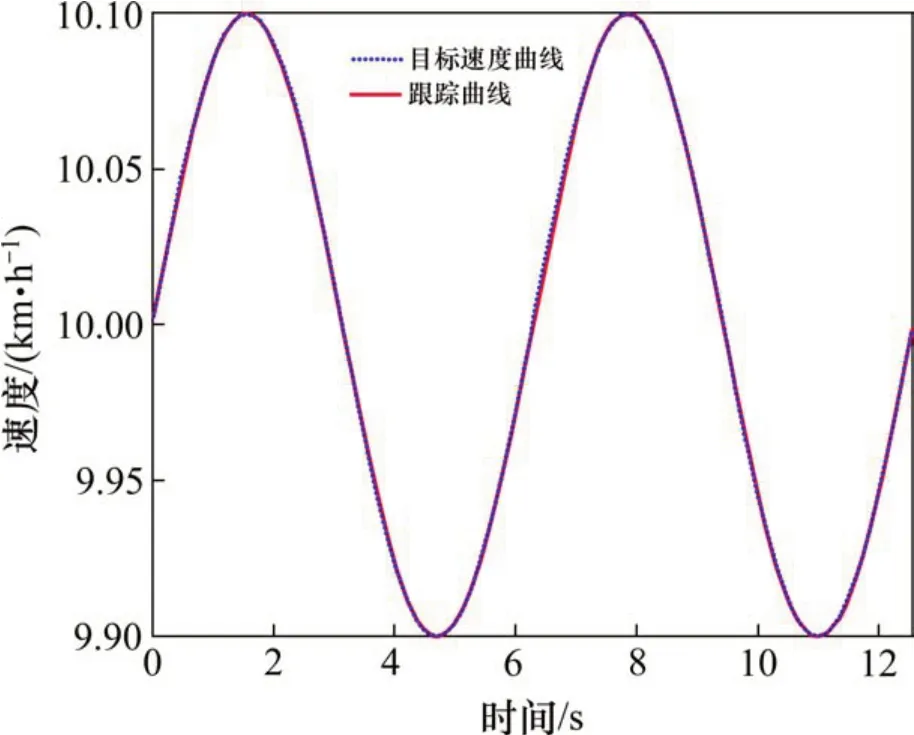
图9 系统跟踪正弦信号效果图Fig. 9 Effect of tracking sinusoidal signal of the system
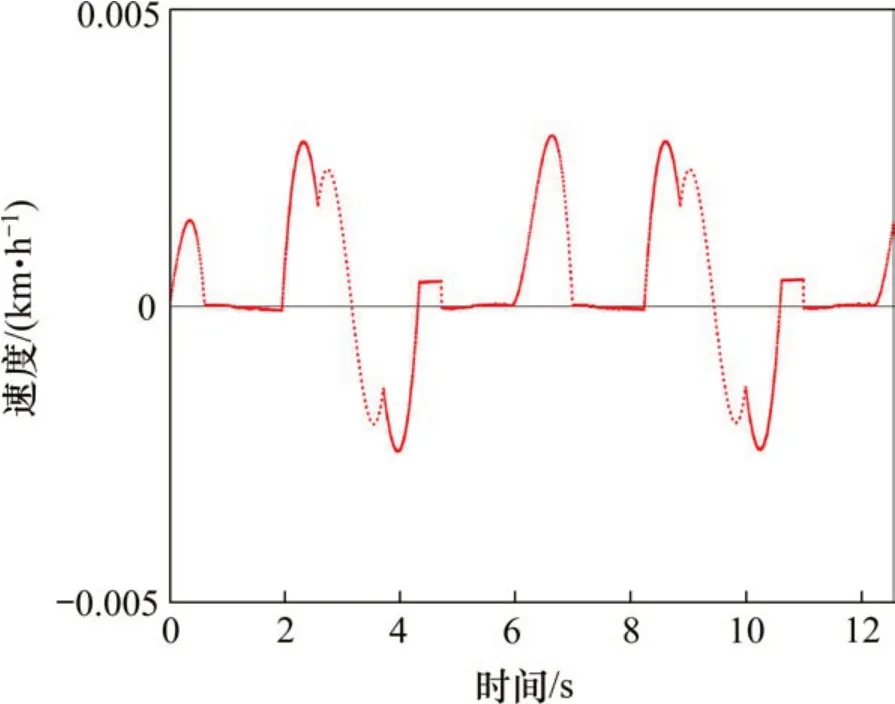
图10 系统对正弦信号的跟踪误差Fig. 10 System tracking error for sinusoidal signal
第二,进一步验证系统的抗干扰能力,结合图4,在干扰处添加幅值为0.001的阶跃扰动,系统的输出见图11。
如图11所示,在添加扰动后,基于TD-ADRC控制器的系统输出的最大值最小,且在最短时间内趋于0。这表明,系统在受到控制量处的扰动时能够通过TD-ADRC控制器很快消除扰动,表现为良好的抗干扰能力。
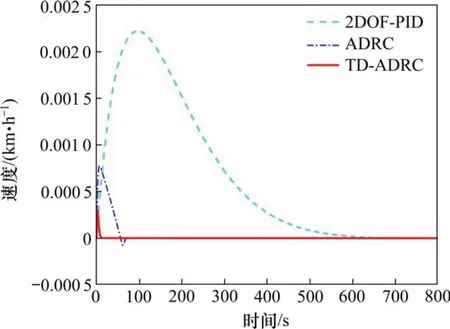
图11 不同控制器的阶跃扰动响应Fig. 11 System step disturbance response based on different controllers
基于图7的磁浮列车速度跟踪模型,本文比较了基于2DOF-PID控制器、ADRC控制器、TDADRC控制器的磁浮列车速度跟踪系统的输出,3种控制器的速度跟踪效果如图12所示。
由图12分析可知,由于时滞环节的影响,基于2DOF-PID控制器的列车速度跟踪系统的输出曲线在加速运行路段与减速运行路段的交界处会出现很大的超调,在减速运行路段和匀速运行路段,跟踪曲线振荡幅度较大,当系统受到扰动时,容易陷入不稳定状态;基于ADRC控制器的列车速度跟踪系统的输出曲线在减速运行路段和匀速运行路段出现小幅度的周期振荡现象;相比于以上2种控制器,基于TD-ADRC控制器的列车速度跟踪系统在减速运行路段和匀速运行路段都能平稳地跟踪目标速度曲线,跟踪精度较高,跟踪曲线没有出现振荡现象,由此可见,TD-ADRC控制器降低了时滞环节给系统带来的不利影响,保证了系统的稳定性,同时,提高了乘客的舒适感。基于这3种控制器的系统的输出误差见图13。

图12 基于不同控制器的系统跟踪效果对比Fig. 12 Comparison of system tracking effects based on different controllers
由图13知,基于TD-ADRC控制器的磁浮列车速度跟踪系统的跟踪误差最小,其次是ADRC,而基于2DOF-PID的系统输出误差最大,直观体现了TD-ADRC控制器在磁浮列车速度跟踪控制中的良好性能,这对列车的精准停车有着重要意义。
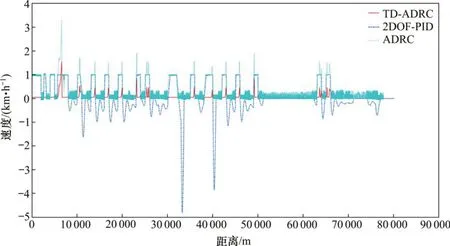
图13 基于不同控制器的系统跟踪误差Fig. 13 System tracking error based on different controllers
4 结论
1) TD-ADRC作为磁浮列车的速度跟踪控制器,能够使磁浮列车较平稳无超调地跟踪目标速度曲线,消除了系统时滞环节引起的速度跟踪曲线振荡现象,提高了系统的稳定性,有效降低了系统时滞特性带来的不利影响,提高了磁浮列车速度跟踪精度,提高了乘客舒适感。
2) 基于TD-ADRC的磁浮列车速度跟踪控制系统有良好的抗干扰能力。
该方法在高速列车的速度跟踪控制、安全性要求很高的化工领域的应用具有良好的参考价值。
