IMU精度对欺骗检测算法的影响分析
2023-02-23李星童王怡晨
李星童,王怡晨
IMU精度对欺骗检测算法的影响分析
李星童1,王怡晨2
(1. 92941部队,辽宁 葫芦岛 125000;2. 国防科技大学,长沙 410073)
针对全球卫星导航系统(GNSS)/惯性导航系统(INS)紧组合导航系统对抗欺骗干扰的常用方法基于新息的欺骗检测算法中,正常情况下,新息向量服从零均值的高斯分布,当受到欺骗干扰时均值不再为零,进而影响欺骗干扰检测效果,且由于INS惯性测量单元(IMU)精度造成的位置误差也会影响新息向量的均值等问题,开展IMU精度对欺骗检测算法的影响分析:提出GNSS/INS紧组合模型与欺骗干扰模型;然后分析IMU精度对欺骗检测算法的影响,以及INS误差传播对观测新息的影响。实验结果表明,不同IMU精度对伪距估计值的影响,导致新息检测量在无欺骗干扰时不再是零均值;使用基于新息的欺骗检测算法对于IMU精度有要求,随着卡尔曼(Kalman)滤波状态传播间隔与检测窗口缩短,对于IMU精度的要求降低。
全球卫星导航系统(GNSS)/惯性导航系统(INS)紧组合;惯性测量单元(IMU)精度;欺骗检测算法;状态传播间隔
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)/惯性导航系统(inertial navigation system,INS)紧组合导航系统通常采用GNSS输出的原始观测信息(如伪距、伪距率、多普勒等)作为测量值,通过卡尔曼滤波器,和INS中的惯性测量单元(inertial measurement unit,IMU)输出的测量值进行融合滤波,得到系统最优的状态估计量[1]。紧组合模式以其适中的计算量和良好的导航性能,成为目前GNSS/INS组合导航技术研究的热点。
对于信号体制公开的民用卫星导航信号,可以采用转发式欺骗和生成式欺骗方法;然而对于未知伪码的授权信号,可以采取转发式进行欺骗干扰[2],所以导航定位的准确性和安全性受到严重威胁。组合导航系统的欺骗检测是提高组合导航系统可靠性的重要途径[3-4]。其中,常用的基于新息的欺骗检测方法包括快照式的欺骗检测法和连续式的欺骗检测法。采用快照式欺骗检测法很难检测斜坡式伪距欺骗,而对于阶跃式欺骗的检测效果要好得多[5]。连续式欺骗检测法能够有效地检测斜坡式欺骗的问题,但是窗口越长,计算所需时间越长[6]。文献[7]提出了新息速率抗差估计检测算法,该算法通过检测新息速率和抗差估计提高了欺骗检测效率。文献[8]提出了基于抗差估计和“检测窗口”的改进检测算法。文献[9]基于紧组合系统模型,研究了基于序贯的紧组合与欺骗检测算法的结合,能够识别不同卫星通道的欺骗信号。
上述文献在提高欺骗检测算法的检测效率方面进行了研究,通过改进算法使得欺骗检测有更好的检测速度,但是这些算法在IMU精度对检测算法的影响方面缺乏研究:通常假设IMU为高精度,对新息检测量不影响,然而低性能的IMU导致的位置误差通过影响组合导航的伪距预测值,而导致新息检测量不再是零均值,进而影响欺骗干扰检测效果。间接影响卡尔曼(Kalman)滤波器的参数,直接或间接地影响欺骗检测效果。开展IMU精度对欺骗检测算法的影响分析,有助于用户根据IMU精度调整合适的欺骗检测算法参数和帮助导航接收机应对复杂的欺骗对抗场景。所以研究IMU精度对于欺骗检测算法的影响是有必要的。
本文研究分析不同的IMU精度对于紧组合抗欺骗干扰算法的影响。首先阐述GNSS/INS紧组合模型和欺骗干扰模型,然后分析不同性能的IMU在短时匀速直线误差传播模型下的传播误差对伪距预测值和新息检测量均值的影响,最后通过仿真实验验证不同精度INS对紧组合欺骗检测算法的影响。
1 GNSS/INS紧组合模型与欺骗干扰模型
1.1 GNSS/INS紧组合模型
GNSS/INS紧组合结构模型如图1所示。根据INS输出的接收机位置速度以及GNSS卫星星历得到的卫星位置速度,组合系统可以更加准确地预测出GNSS信号的伪距和多普勒(Doppler)频移,而这些伪距和伪距率预测值与GNSS实际测量值作差形成卡尔曼滤波观测值,观测值通过卡尔曼滤波系统就可以得到对INS定位定速结果的校正量[10]。
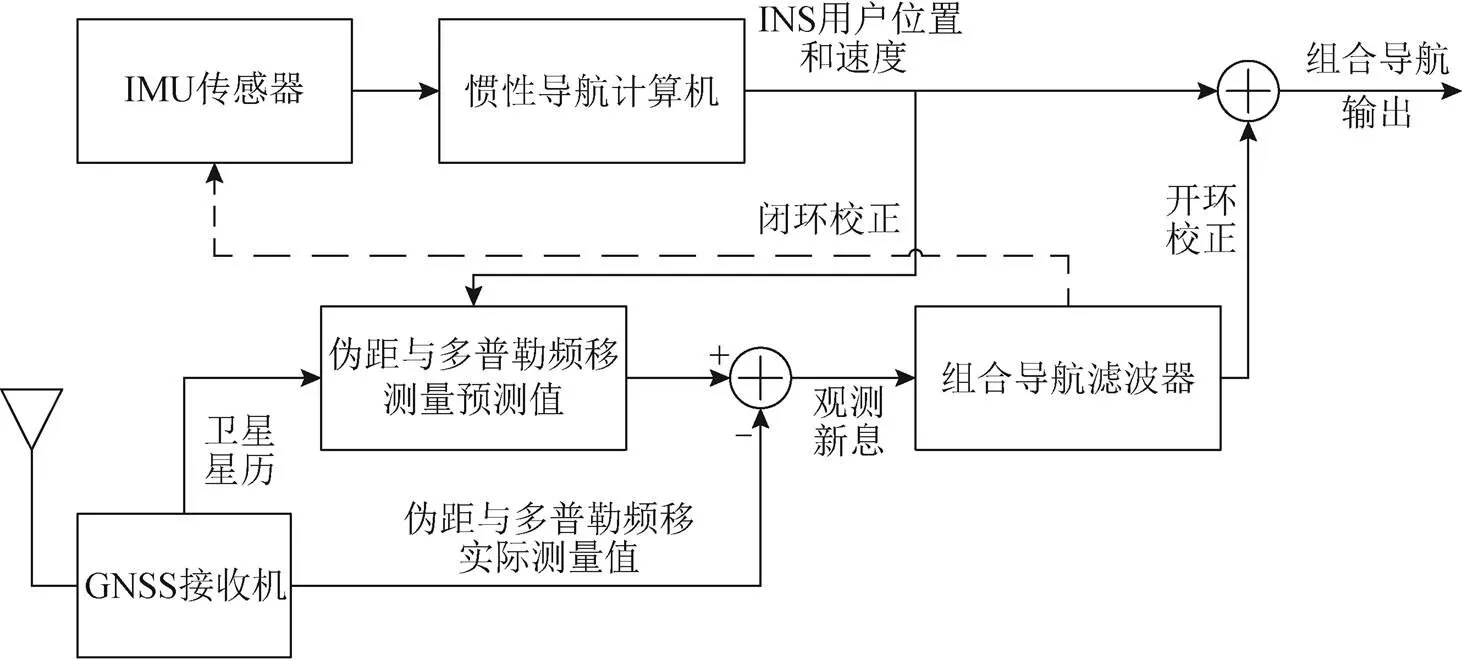
图1 GNSS/INS紧组合示意
在与INS一起使用的滤波器中,状态矢量通常不是估计的状态。为了减小线性化误差带来的影响,通常选择误差状态矢量。根据紧组合模式特点,选取位置误差、速度误差、姿态误差、陀螺仪零偏、加速度计零偏、钟差和钟漂等共17个状态作为误差状态向量。
在闭环卡尔曼滤波中,滤波得到的误差估计值在每次迭代中反馈回去,用于校正系统本身,使过程中卡尔曼滤波状态趋于零值。而在开环卡尔曼滤波中,由于没有反馈,状态值会随着时间增长而逐渐变大。因此闭环卡尔曼滤波普遍应用于组合导航。

1.2 欺骗干扰模型
基于GNSS测量值的伪距欺骗数学模型可以表示为

2 IMU精度对欺骗检测算法的影响
2.1 欺骗检测算法

测量与状态估计之间更小的、缓慢建立的偏差,可以通过最新的个测量构成统计检验来辨识。为“检测窗口”,当为1时即为快照式欺骗检测,大于1时为连续式欺骗检测。卡方检测常用于新息欺骗检测算法[16-18],构造新息检验统计量为

其中


2.2 INS误差传播对观测新息的影响
IMU精度通常通过零偏和随机噪声来表征,零偏误差项在所有加速度计和陀螺仪中都存在,在大多数情况下,零偏误差项是惯性仪表所有误差的主要成分;另外受多种误差源的影响,所有惯性传感器都表现出随机噪声。
在GNSS/INS组合系统中,由于每间隔一段时间GNSS与INS输出结果就要进行融合滤波,所以在考虑IMU精度对新息的影响时,可以将INS的误差传播模型等价成短时间匀速直线误差传播。速度误差是加速度误差的积分,常值加速度偏差产生的速度和位置误差为


不同性能等级的IMU精度参考如表1所示[12]。

表1 不同性能等级的IMU精度参考

计算不同等级IMU和不同误差传播时间下的传播误差如表2所示。

表2 伪距误差 m
所以由IMU精度导致的观测值误差不仅随着IMU精度降低而增大,同时也随着误差传播时间的增大而增大。由于闭环卡尔曼滤波每次迭代都会校正系统本身,所以在组合导航中INS误差传播时间为卡尔曼滤波的状态传播间隔,即IMU精度导致的观测值误差随着卡尔曼滤波状态传播间隔的增大而增大。
利用组合导航新息检测欺骗干扰时,通常假设在状态传播间隔内INS的输出是相对准确的;但是由于IMU精度的影响,当INS导致的伪距误差接近甚至超过由相同时间欺骗干扰带来的伪距偏差时,新息检测得到的结果将变得不可信。由1.1节分析可知,当时刻有INS传播误差时,观测向量在闭环校正中同时也是观测新息向量,其中伪距观测量部分可以表示为
由此可知,利用新息进行欺骗检测时,对IMU性能有要求,即在检测窗口内由IMU导致的观测值总偏差不能超过新息欺骗检测算法的检测门限。
3 实验与结果分析
3.1 实验设计
为比较不同IMU精度对欺骗检测算法的影响,顾及由IMU精度导致的观测值误差不仅随着IMU精度降低而增大,同时也随着卡尔曼滤波状态传播间隔与检测窗口长度的增大而增大,主要从以下方面设计实验:
实验1)施加相同的斜坡式欺骗,分析比较不同精度INS在相同状态传播间隔内对欺骗检测算法的影响。
实验2)施加相同的斜坡式欺骗,分析比较低精度INS在不同状态传播间隔对欺骗检测算法的影响。
实验3)施加相同的斜坡式欺骗,分析比较不同检测窗口的欺骗检测算法在低精度INS和在相同状态传播间隔时的效果。
实验基于420 s的机载轨迹数据,飞机以 200 m/s的速度飞行,中间进行2次相反的45°转弯,最后爬升500 m。IMU模块参数设置参考2.2小节,GNSS模块设置30颗卫星均匀分布在6个圆轨道上,参数设置如表3所示。

表3 GNSS参数设置 m
3.2 结果分析
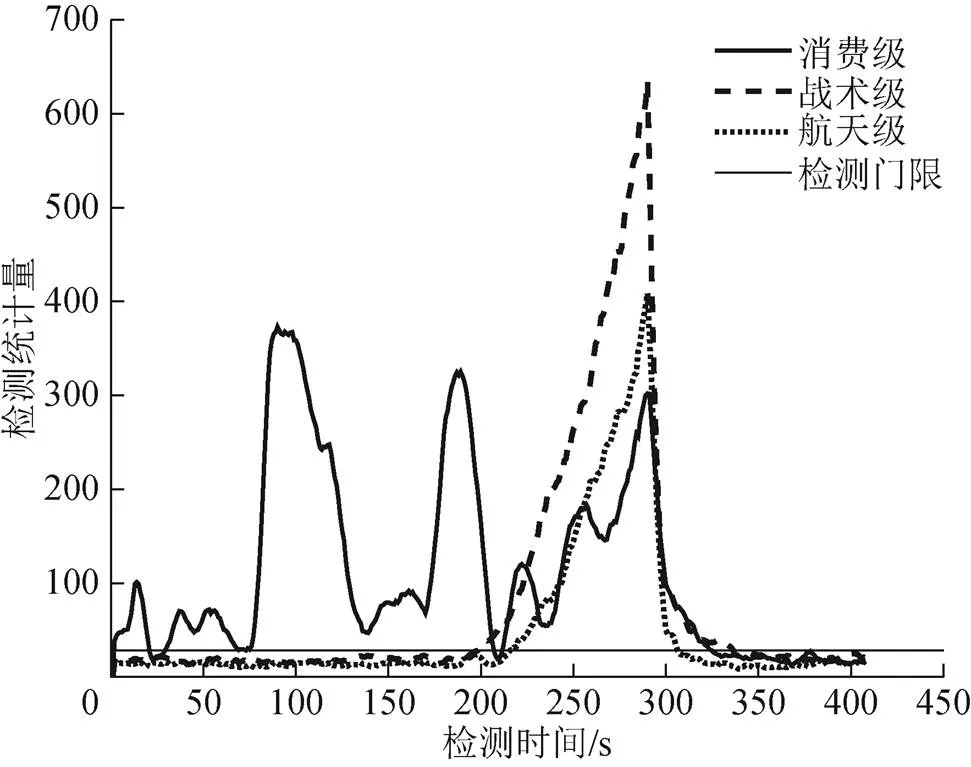
图2 不同IMU精度时的检测情况
结果表明:使用战术级和航天级IMU能够正常检测出欺骗干扰;当使用消费级IMU时,检测量出现异常,并导致虚警次数过多。

图3 不同状态传播间隔时的检测情况
结果表明:当卡尔曼滤波器状态传播间隔缩短为0.1 s时,检测量的分布趋于正常情况;但是在未受到欺骗干扰时,欺骗检测量的值仍旧超过门限,检测算法失效。
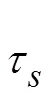
结果表明,通过缩短窗口使得原本失效的欺骗检测算法能够检测欺骗干扰,但是缩短窗口会使得检测斜距式欺骗的时间延长。
结合3个实验的结果可知,IMU精度确实会影响欺骗检测算法的检测效果,在使用消费级IMU时受到的影响更大,甚至会导致欺骗检测算法失效。具体表现在未受到欺骗干扰时,欺骗检测统计量仍然受到IMU精度带来的误差影响,使得欺骗检测统计量超过门限。并且实验表明,通过调整卡尔曼滤波器状态传播间隔与欺骗检测算法的检测窗口能够降低低精度IMU带来的影响。
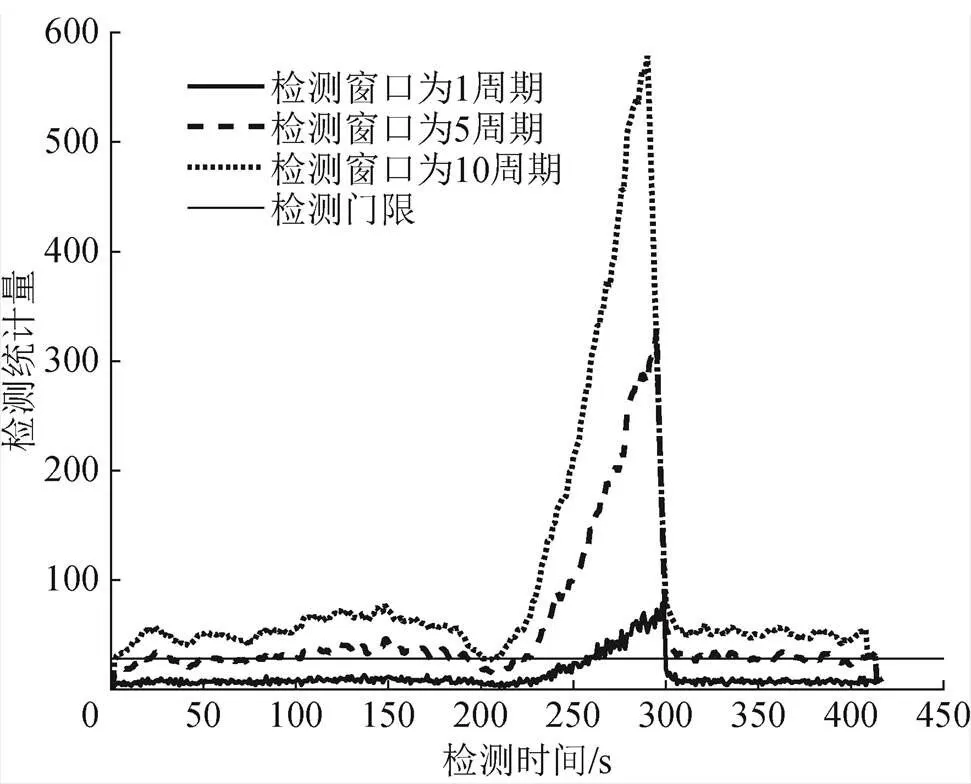
图4 不同窗口时的检测情况
4 结束语
本文通过理论推导与仿真实验,对比分析了不同IMU精度对紧组合抗欺骗算法的影响,并且实验分析了卡尔曼滤波器状态传播间隔与欺骗检测算法的检测窗口2个因素的作用。仿真结果表明,不同IMU精度对伪距估计值的影响导致新息检测量在无欺骗干扰时不再是零均值,使用基于新息的欺骗检测算法对于IMU精度有要求,随着检测概率和卡尔曼滤波状态传播间隔增加,对于IMU精度的要求提升。具体为:
1)IMU精度确实会影响欺骗检测算法的检测效果,消费级IMU会导致卡方欺骗检测算法虚警。
2)在卡尔曼滤波器的状态传播间隔小于等于0.1 s并且使用的检测窗口等于1的条件下,消费级IMU导致的卡方欺骗检测算法虚警问题得到解决,但是存在大于50 s的检测时延。
[1] BIAN S, HU Y, JI B. Research status and prospect of GNSS anti-spoofing technology[J]. Sci Sin Inform, 2017, 47(3): 275-287.
[2] 庞春雷, 郭泽辉, 吕敏敏, 等. 基于PNN的北斗转发式欺骗干扰信号检测方法[J]. 中国惯性技术学报, 2021, 29(4): 554-560.
[3] WANG S, ZHAN X, PAN W, et al. GNSS/INS tightly coupling system integrity monitoring by robust estimation[J]. Journal of Aeronautics Astronautics and Aviation, 2018, 50(1): 61-79.
[4] 王立冬, 车琳, 鲁军, 等. 基于改进型灰色预测模型的 SINS/GPS 组合导航系统[J]. 中国惯性技术学报, 2015, 23(2): 248-252.
[5] LIU Y, LI S, FU Q, et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. Ieee Sensors Journal, 2019, 19(13): 5167-5178.
[6] FENG Yang, CHENG Cheng, QUAN Pan. Practical integrated navigation fault detection algorithm based on sequential hypothesis testing[J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 146-149.
[7] 徐张超, 吕志伟, 张伦东, 等. 基于新息速率抗差估计的INS/GNSS组合导航系统欺骗检测算法[J]. 中国惯性技术学报, 2021, 29(3): 328-333.
[8] ZHANG C, ZHAO X, PANG C, et al. Improved fault detection method based on robust estimation and sliding window test for INS/GNSS integration[J]. Journal of Navigation, 2020, 73(4): 776-796.
[9] 周鹏飞. GNSS/INS组合导航抗欺骗性干扰关键技术研究[D]. 国防科学技术大学, 2015.
[10] LIU Y, LI S, FU Q, et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. IEEE Sensors Journal, 2019, 19(13): 5167-5178.
[11] LIU Yang, LI Sihai, FU Qiangwen, et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. IEEE Sensors Journal, 2019, 19(13): 5167-5178.
[12] GROVES P D. Principles of GNSS, inertial and multisensor integrated navigation systems[M]. 2nd ed. London: Artech House, 2013.
[13] 黄盼. GPS/INS深耦合系统抗欺骗式干扰关键技术研究[D]. 电子科技大学, 2014.
[14] 张晓明, 刘磊. 基于M-估计的抗欺骗卡尔曼滤波算法[J]. 无线电工程, 2022, 52(3): 450-455.
[15] 袁超, 康国华, 郑峰婴, 等. 基于加权估计的紧组合导航抗欺骗算法研究[J]. 现代电子技术, 2013, 36(19): 1-4.
[16] 张超, 吕志伟, 张伦东, 等. 基于新息速率抗差估计的INS/GNSS组合导航系统欺骗检测算法[J]. 中国惯性技术学报, 2021, 29(3): 328-333.
[17] 李四海, 刘洋, 张会锁, 等. 惯性信息辅助的卫星导航欺骗检测技术[J]. 中国惯性技术学报, 2013, 21(3): 336-353.
[18] 肖岭, 唐小妹, 李柏渝, 等. GNSS双接收机抗欺骗技术[J]. 国防科技大学学报, 2016, 38(3): 45-49.
[19] 刘科. GNSS欺骗干扰检测算法与实验验证方法研究[D]. 长沙: 国防科技大学, 2019.
[20] 张鑫. 卫星导航欺骗干扰信号仿真与检测关键技术研究[D]. 长沙: 国防科技大学, 2014.
Influence analysis of IMU accuracy on spoofing detection algorithm
LI Xingtong1, WANG Yichen2
(1. Troops 92941, Huludao, Liaoning 125000, China;2. National University of Defense Technology, Changsha 410073, China)
Aiming at the problems that in the spoofing detection algorithm based on innovation that is a common method to combat spoofing in global naviagtion satellite system (GNSS)/inertial navigation system (INS) tightly integrated navigation system, under normal conditions, the innovation sequence obeys Gaussian distribution with zero mean value, and the mean value is no longer zero when spoofing interferes, which affects the detection effect of deception interference, moreover, because the position error caused by the accuracy of inertial measurement unit (IMU) will also affect the mean value of innovation vector, the paper analyzed the influence of IMU accuracy on the spoofing detection algorithm: the GNSS/INS tight combination model and spoofing model were proposed; and then the influences of IMU accuracy on spoofing detection algorithm, and INS error propagation on observation innovation were elaborated. Experimental result showed that the influence of IMU accuracy on the estimated pseudorange value would lead to the fact that the detection quantity could be no longer zero mean when there is no spoofing interference; and the spoofing detection algorithm based on innovation would have requirements on the accuracy of IMU, while with the shortening of the Kalman filter state propagation interval and detection window, the requirements for IMU accuracy could be reduced.
global naviagtion satellite system (GNSS)/inertial navigation system (INS) tight combination; accuracy of inertial measurement unit (IMU); spoofing detection algorithm; state transmission interval
李星童, 王怡晨. IMU精度对欺骗检测算法的影响分析[J]. 导航定位学报, 2023, 11(6): 87-92.(LI Xingtong, WANG Yichen. Influence analysis of IMU accuracy on spoofing detection algorithm[J]. Journal of Navigation and Positioning, 2023, 11(6): 87-92.)DOI:10.16547/j.cnki.10-1096.20230611.
P228
A
2095-4999(2023)06-0087-06
2023-09-30
李星童(1997—),男,黑龙江鹤岗人,硕士,研究方向为导航时频技术与应用。
