海底大地控制网无人观测系统研究进展
2023-02-23薛树强李景森卞加超
薛树强,杨 诚,赵 爽,肖 圳,李景森,卞加超
海底大地控制网无人观测系统研究进展
薛树强1,2,杨 诚3,赵 爽1,肖 圳1,李景森1,卞加超1
(1. 中国测绘科学研究院,北京 100039;2. 地理信息工程国家重点实验室,西安 710054;3. 中国地质大学 土地科学技术学院,北京 100083)
针对海底大地控制网观测维护通常采用基于大型测量船的全球卫星导航系统(GNSS)-声呐组合观测系统,不仅导致控制网观测维护成本高昂,也限制了控制网的复测频次和全球大规模应用的问题,研究综述海底大地控制网无人观测系统:指出近年来,基于海面浮标、无人船、波浪滑翔机、无人机等无人系统的GNSS-声呐组合观测系统快速发展,大幅降低了传统海底大地控制网观测成本,提升了海底控制网观测维护效率;阐述国内外GNSS-声呐无人观测系统研究进展,并分析现有无人观测平台的优缺点;最后提出GNSS-声呐无人观测系统发展面临的挑战和可能的发展方向。
海底大地测量;全球卫星导航系统(GNSS)-声呐;无人系统;水下定位
0 引言
海底大地测量在研究地球动力学过程中具有重要的科学意义,包括地壳构造运动以及海洋、大气和固体地球层之间的耦合相互作用[1-2]。根据科学估计,人类只探索了大约5%的海洋,这使得海洋观测成为人类认识海洋的关键技术手段[3-4]。水下大地测量参考网是进行水下大地观测的重要基础设施,也是未来国家水下海洋观测和建立综合时空系统的重要组成部分。因此,海底大地测量是大地测量的重要新兴发展方向,也是未来地球科学的重要支撑学科方向[5-6]。
美国斯克利普斯海洋研究所(Scripps Institution of Oceanography,SIO)最早提出了将全球定位系统(global positioning system,GPS)-声呐技术应用于海底大地测量[7],并在1998年成功应用于胡安·德富卡板块[8],开展了卓有成效的工作。海底声学大地测量技术是基于声学手段实施海底大地测量的技术,自20世纪七八十年代提出至今[9-10],全球卫星导航系统(global navigation satellite system,GNSS)-声呐组合观测技术逐渐成为海底大地测量的主流观测技术,在大尺度海底板块运动监测、地震活动监测等方面具有显著优势[8,11-14]。然而,受GNSS-声呐观测成本限制,长期以来GNSS-声呐观测采用定期观测模式,通常每年复测3~5次。因此,要进行海底1 cm的位移监测,GNSS-声呐组合观测技术至少需要2~3 a的复测资料[2]。近年来,随着无人机、海面浮标/无人船、半潜式自主式水下航行器和波浪滑翔器等无人观测系统的发展,替代大型测量船的无人平台GNSS-声呐观测系统受到广泛关注,在经济性、自主性、连续性观测等方面具有显著优势[15-16],预计海底大地控制网观测维护成本可下降近百倍。
近年来,海洋定位导航授时(positioning,navigation and timing,PNT)基准网建设是当今世界大国必争的高技术战略领域[17-18]。相比于其他海洋观测平台,大型科考船舶观测平台人工成本、燃料成本和时间成本较为昂贵。GNSS-声呐观测通常基于大型海面测量船实施,即海面测量船按一定航迹对海底控制网进行跟踪观测[8],并且必须在测量区域连续测量数小时甚至近一天,才能实现厘米级的海底定位。早先,GNSS浮标主要用于海啸预警,可直接测量海平面的厘米级的变化[19],解决海底压力传感器监测信息存在飘移的问题[19]。为了尽早发现海啸及引起海啸的地壳形变[20-21],有学者开发了一套用于海底地壳运动和海啸监测预警的松弛系泊浮标系统,并于2013年在距纪伊半岛100 km、水深3000 m处进行了为期3个月的海上实验[22]。实验结果显示,该浮标系统提升了抵抗高速海流(约2.7 m/s)的能力,并于2014、2016年分别进行了为期5个月和12个月的海上实验[23],取得了与传统观测精度相当的定位结果。
水面无人船(unmanned surface vehicle,USV)和水下滑翔机(underwater glider,UG)均已成功应用于GNSS-声呐观测。水面无人船是一种集船舶设计、运动控制、人工智能、环境感知等技术于一体的无人水面平台,具有高自主性、高灵活性、强机动性、可模块化、多任务化等优点[24]。国内水面无人船处于迅速发展时期,已在水文物理勘察、海洋牧场巡检、海底海床地形地貌扫描等领域获得应用[25]。水下滑翔机是一种无外挂驱动,依靠自身浮力和姿态调节控制其运动的新型水下机器人,是一种逐渐成熟的适用于长时间、大范围海洋环境观测的新技术平台。
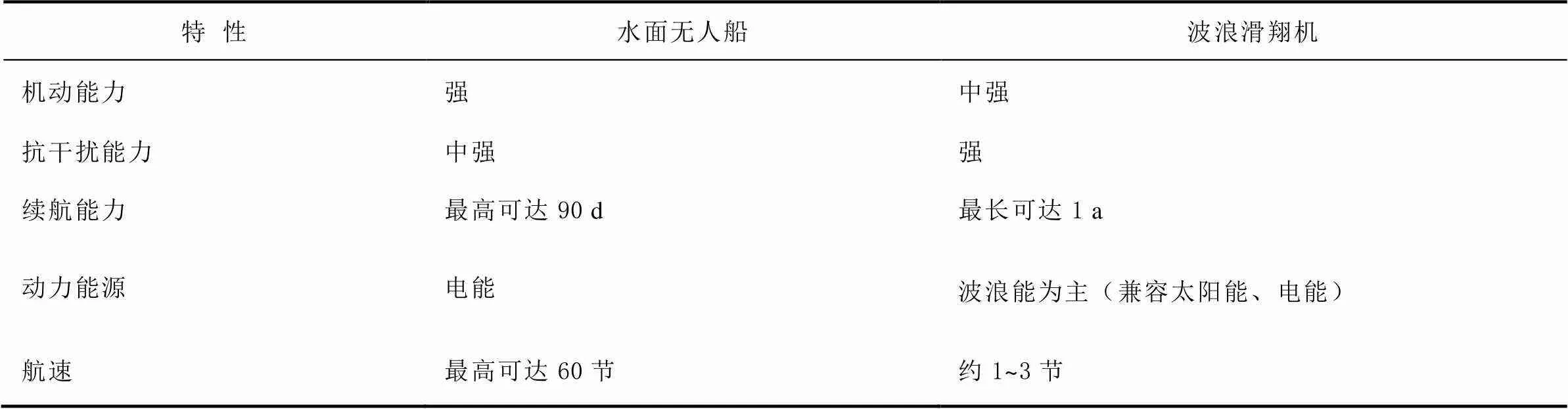
表1 水面无人船性能特点
按照动力能源方式划分为多模式推进式UG、电能UG、温差能UG和波浪滑翔机(wave glider,WG)。其中,波浪滑翔机依靠波浪能作为动力源,同时结合波浪能发电装备优势,将浮体在波浪作用下的沉浮运动转化为前进的运动。WG能克服携带能源有限的不足,完全依靠清洁、可再生波浪能作为驱动能源;且波浪能储备丰富,可全天候满足远海航行,尤其是在海洋环境复杂海域具有优势。另外,通过精心设计的测量航迹,在浅水中使用WG对单个应答器的测量也能达到厘米级的水平定位精度[26]。
自2009年第一款波浪滑翔机研制成功至今,波浪滑翔机在水文气象环境观测、海洋水体要素监测等方面应用广泛。鉴于波浪滑翔机在能源动力、生存能力、实施便捷性、深远海支持等方面的突出优势,近年来基于波浪滑翔机的GNSS-声呐无人观测系统逐渐获得海洋大地测量学者的关注和青睐。目前,日本东北大学、日本海洋地球科学技术机构、美国斯克里普斯海洋研究所、德国亥姆霍兹基尔海洋研究中心、荷兰皇家壳牌等科研单位和企业已采用此类型无人观测系统分别在日本千岛海域和青森县海域[15]、美国卡斯卡迪亚俯冲带和阿留申俯冲带海域[27]、智利纳斯卡-南美板块边界海域[28],以及墨西哥湾海域进行了海底大地测量[29]。
本文回顾GNSS-声呐观测系统架构及其关键技术问题,跟踪国外无人化GNSS声呐观测系统研究进展,梳理浮标观测系统、无人船观测系统和无人化系统的优缺点,提出未来无人化平台GNSS-声呐观测装备标准化构想,分析未来无人化观测系统所面临的声速剖面观测难题,并指出后续GNSS声呐观测数据处理所面临的主要挑战。
1 GNSS-声呐观测系统
如图1所示为GNSS-声呐观测模型。图中BDS为北斗卫星导航系统(BeiDou navigation satellite system)。

图1 GNSS-声呐观测构型
一般由多个海底大地点构建一个海底基准阵列(或称海底局域网),由船载声学换能器向海底阵列发送声学测距信号,海底单元接收信号后返回声学应答信号,然后再次被海面换能器接收,据此进行声信号往返程传播时间测量,从而进行海底基准站或局域控制网定位[30-31]。可建立GNSS-声呐组合观测模型为

1.1 GNSS高精度定位技术
GNSS高精度定位是实现海底精密定位的前提。实时动态差分定位(real time kinematic,RTK)技术和精密单点定位 (precise point positioning,PPP)技术是2种被用户广泛使用的高精度定位技术[32]。RTK技术采用经典的站星双差观测值模型消除站星钟差,削弱电离层延迟等空间相关误差。伪距和载波观测方程为[33-34]

利用站间单差消除卫星钟差和卫星硬件延迟,对卫星做站间单差为
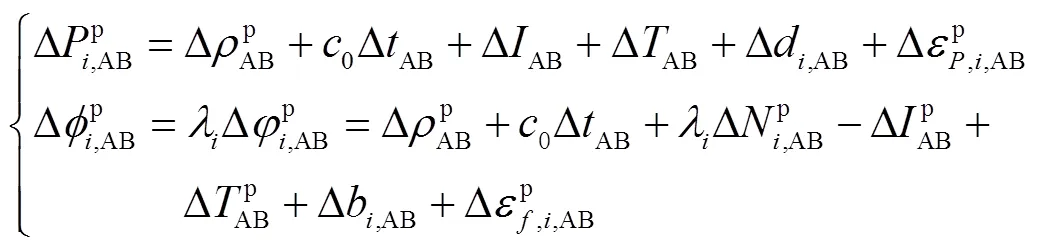


利用站星双差观测值进一步消除接收机钟差和接收机端硬件延迟,有


RTK技术通过流动站与基准站构成差分观测,消除了卫星钟差、接收机钟差以及公共环境误差,模糊度保留了其整数特性,因而具有很高的定位精度。需要指出,当流动站与基准站距离超过一定限制,会因公共环境误差消除不净而导致定位精度下降,无法有效支撑远海高精度定位需求。通常认为RTK定位技术用于海洋定位时,流动站最远不能超过岸边20 km[37]。然而,对于海底地震以及海啸预警应用而言,20 km外的浮标预警信息仅能提前10 min疏散人员,疏散岸上人员的时间显然不够。因此,须将监测点放置在距岸边更远处[23]。当流动站与基准站距离超过20 km时,若要确保厘米级精度定位,应考虑对差分残余环境误差实施改正或参数化估计,因此需要发展长距离RTK技术或RTK-PPP技术[38-39]。
实时PPP技术利用国际GNSS 服务组织(International GNSS Service,IGS)通过网络播发的实时轨道和钟差的改正信息,在综合考虑各项误差模型的精确改正或进行参数估计的条件下,采用单台接收机就可以达到厘米级精度[40-41]。根据对电离层延迟的不同处理方法,通常分为采用无电离层组合和电离层参数估计这2种方法,对应2种不同PPP函数模型,即双频消电离层组合以及基于原始观测值的非差非组合模型。采用双频消电离层组合模型是PPP中最为常用的观测模型,可表示为[42-44]
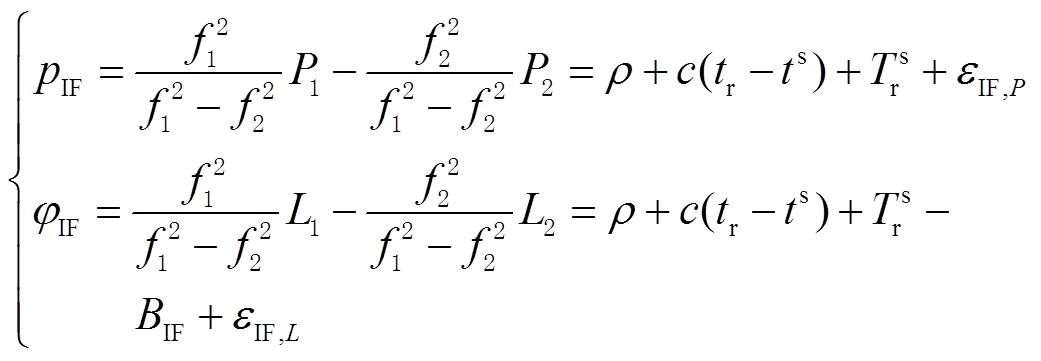

常用的无电离层组合不能消除高阶电离层的影响,且观测噪声放大[45]。近年来,部分学者开始研究基于原始观测值的非组合PPP模型(如式(2)所示),该模型可以利用所有观测信息,任何频率的观测值均可以按照这种模型建立观测方程,不再局限于双频,且不改变观测噪声,能避免高阶电离层误差影响,回避双差观测值的数学相关性等[44-46]。
由于接收机端和卫星端的载波相位观测值信号延迟,非差非组合的PPP模糊度不具有整数特性[43]。针对这一问题,学者们先后提出了未校准相位偏差[47]、整数钟[48]、解耦钟[48],以及相位钟等[49]方法恢复非差模糊度的整数特性。模糊度的整数固定解不仅能提高实时PPP的定位精度,还能显著缩短PPP定位的初始化时间,实现与RTK相当的定位精度和定位效率。相比于RTK技术,PPP技术不依赖参考站和作业距离,且在远海区域具有显著的优越性。到海洋高精度定位领域,文献[50]发展了一种新的海啸预警系统[50],采用精密单点定位-非差模糊度固定方法(precise point positioning-ambiguity resolution,PPP-AR),其定位可突破20 km的距离限制[51]。该技术的前提是能够通过卫星系统获得精确的轨道和时钟,即可在海洋上的任意位置实时高精度连续监测。
在远洋区域,RTK和实时PPP服务仍受限于网络覆盖。目前可提供实时高精度服务的运营商和其服务内容主要有麦基嘉(NavCom)的星火(StarFire)服务、天宝(Trimble)的实时差分拓展技术(real time extended,RTX)服务等,即通过卫星通信链路给付费用户播发实时改正数而进行实时PPP等定位方式[52]。PPP-RTK技术是集成了PPP和RTK的优势,为用户提供厘米级精度的定位服务,具有高精度、灵活性和保护用户隐私的优点,然而需要网络传输地面参考网的改正数,因在远海区域网络传输不稳定,易导致定位精度下降[39]。有学者针对远海高精度定位提出采用BDS短报文传输改正信息,使传输卫星改正信息不再受距离的限制,但受限于BDS短报文通信频率和带宽限制,须采用不同的编码方式播发卫星轨道和钟差,所以针对改正数的传播分别提出了不同的编码方式,并证明利用BDS短报文传输改正信息可以满足远海的高精度定位[53-54]。需要指出北斗三号全球卫星导航系统(BeiDou-3 global navigation satellite system,BDS-3)通过静止地球轨道(geostationary Earth orbit,GEO)卫星的B2b信号播发精密轨道和钟差改正数,为用户提供实时精密单点定位服务[55-56],在BDS-3实时PPP服务覆盖范围内,可以解决远海高精度定位难题[57]。
1.2 臂长改正技术
GNSS-声呐定位受到多种误差因素的影响。臂长参数(GNSS天线到声学换能器的矢量)即为其中之一。由于换能器的位置是根据GNSS天线位置、臂长参数信息以及船体姿态观测信息计算得到,因此,臂长参数的测量误差会影响换能器位置的准确性,进而影响海底控制点的定位精度。针对臂长参数误差对声学换能器坐标的影响,有学者采用基于线性化误差传播的测量不确定度评定与表示方法以及基于非线性误差传播的蒙特卡罗方法对其进行了不确定度评估[58]。标定臂长参数是GNSS-声呐系统集成后的重要步骤。暂时忽略声速场环境参数,臂长参数校准观测方程为



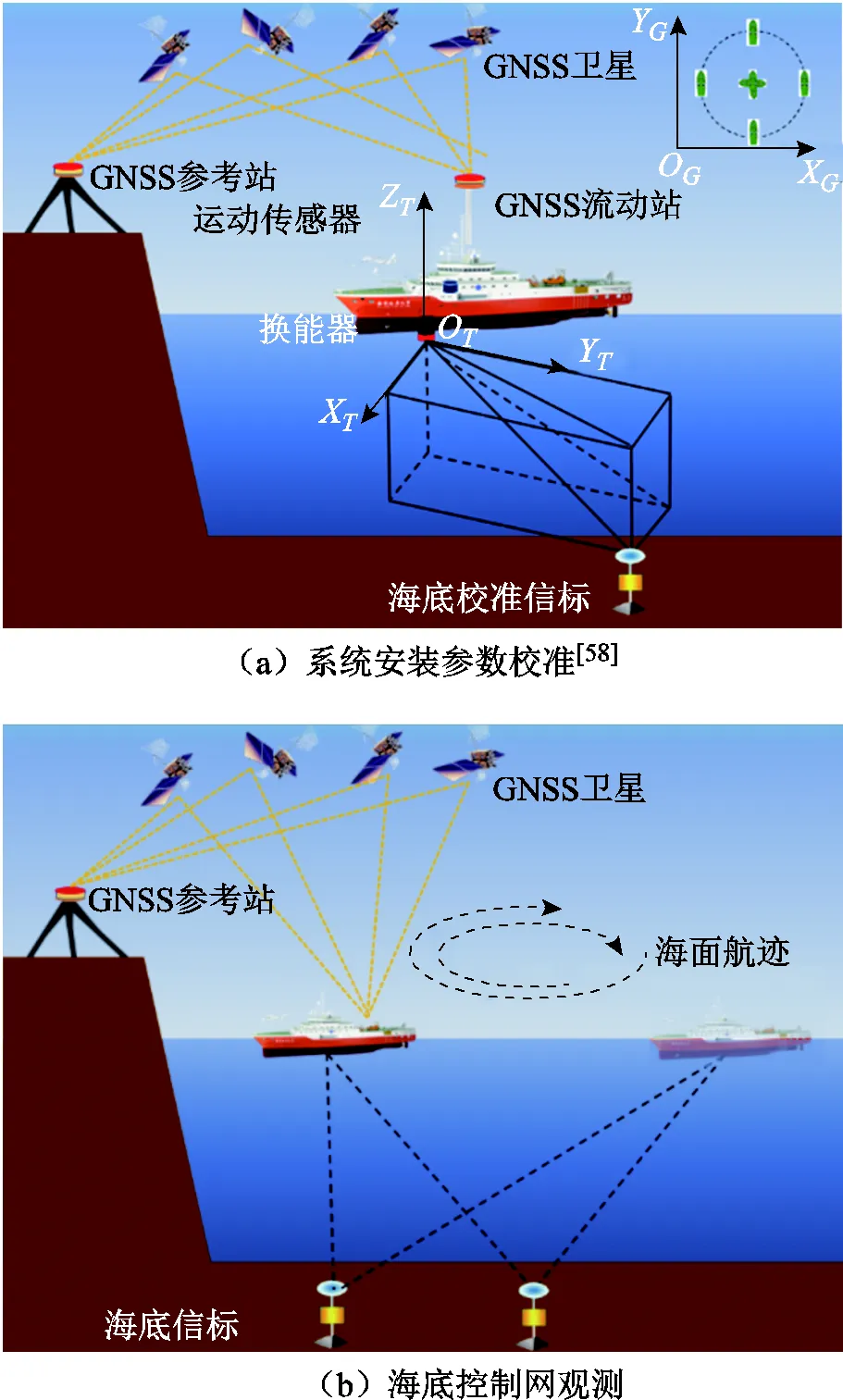
图2 GNSS-声呐无人船观测系统与海底控制点校准
在对超短基线水声定位系统校准过程中,将臂长参数与海底控制点位置进行联合参数化估计,可以提高臂长校准及海底定位精度[59]。研究表明,直接将臂长参数与海底控制点坐标作为待估参数共同解算,可能会因参数之间强相关而出现观测方程病态的问题,导致解算结果不可靠。对于臂长参数的垂直偏移量与海底控制点垂向坐标存在强相关的问题,可采用样本搜索法对垂直偏移量进行修正[62]。有学者通过分析臂长参数误差对定位结果的影响,以及推导臂长参数和海底控制点坐标参数之间的相关性,从理论上阐述了观测方程产生病态的原因,进而构建了一种顾及臂长参数先验信息的贝叶斯估计模型,有效提高了臂长参数和海底控制点坐标的解算精度[63]。
相比于传统测量船,无人平台标准化程度高,为标准化定制GNSS-声呐臂杆及GNSS、声呐和姿态传感器一体化观测平台提供了可能,特别是可以提供更为精确的垂向偏移量量测信息,从而解决GNSS-声呐臂杆精确量测难题。需要指出,由于天线相位中心和声呐环能器的电气中心很难精确确定,从而再精确的事前臂杆量测信息也无法替代系统集成后的GNSS-声呐臂长标校测量。
1.3 声速误差补偿技术
海洋环境复杂多变,海洋声线折射比电磁波折射更为严重。由于很难实时获取测区高精度、高时空分辨率海洋声速场,因而通常只能获取少量声速剖面信息。因此,补偿声速剖面误差成为海底高精度定位的重要途径。

式中:为声速误差相关参数相对于初值的改正;为待估声速误差相关参数的系数矩阵。在海底单点定位观测条件下,可以采用声呐天顶延迟改正模型,此时为天顶声呐延迟参数;为天顶延迟映射函数构成的矩阵,为观测天顶角和方位角的函数。
无人观测系统难以获取全水深声速剖面,其在降低了观测成本的同时,亦增加了海底精密定位的难度,因此亟须发展更为有效的时空声速场反演模型,考虑更多声速模型误差补偿问题,特别是声速场垂向变化补偿。当不存在声速剖面时,可将其与海底站坐标进行联合反演,以提高海底定位的精度。当不考虑声速的时空变化时,单纯利用GNSS-声呐反演的声速剖面实施海底定位,则难以满足厘米级精度定位要求。最近有学者通过构建更为合理的经验声速剖面模型并顾及声速时空变化,实现了厘米级精度的海底大地测量定位[71]。
2 GNSS声呐浮标观测系统
GNSS浮标在潮汐监测[37]、大气研究以及电离层研究[72]等方面都得到了应用。由于应变系泊浮标抵抗洋流能力较差,可将锚与浮标间的连接方式改为松弛系泊浮标,以更好地抵抗洋流、风浪的影响[21,73-74]。松弛系泊浮标原型系统中的系泊线由浮标和线端站之间的钢丝绳、尼龙绳、聚丙烯绳和锚组成[73],随后由铁链替代。针对附着在浮标体上的藤壶是否会引起浮力或倾斜的变化,以及铁链是否会因摩擦而发生断裂等问题,有学者于2013—2016年在室户岬进行了3年零7个月的实验,结果表明,附着在浮标体上的藤壶并没有对浮标的浮力或者倾斜产生影响[50]。此外,对铁链进行耐摩擦设计,也可使浮标运行10 a甚至更长时间而不发生断裂[50]。
为尽早发现海啸以及引起海啸的地壳形变[20],同时具备海啸和海底地壳运动监测功能的松弛系泊浮标系统已成为海洋大地测量及相关科学研究的重要观测系统。一套用于海底地壳运动和海啸监测的松弛系泊浮标系统被开发,且具有抵抗高速海流(约2.7 m/s)的能力[73],并于2014年和2016年分别进行了为期5个月[22]及1 a[75]的海上实验。该松弛系泊浮标原型系统[73]由3部分组成:一个海底压力单元,用于监测海啸和地壳形变的垂直分量;6个应答器构成虚拟海底基准,用于测量地壳形变;一个浮标系统,用于控制该系统并进行实时数据传输。浮标系统由浮标站作为主要控制中心,一个GNSS定位系统(4个GNSS天线,用于估计浮标的位置、倾斜和旋转)和声学站接收海底应答器发出的声学信号。在1000 m的电线末端设置一个线端站,用于在浮标站和海底压力装置之间传递信号,并为海啸数据添加时钟信息(如图4所示)。另外,压力数据和声学观测数据通过2个不同的卫星通信系统从浮标站的数据记录仪传输到陆面站。其中,压力数据发送到陆地站的周期根据正常模式和海啸模式分别为1 h和15 s,声学观测数据发送周期为7 d[22]。海底至少需要3个应答器作为一组,通常形成正多边形阵列,尺寸大小大致等于测量区域的深度[74]。

图4 海啸和地壳形变观测系统示意
在松弛系泊浮标系统中,由于风和海流的影响导致浮标发生漂移,进而产生2个问题:一是浮标逐渐远离阵列中心时测量分辨率很差[76];二是来自不同位置的测量妨碍了对阵列几何结构不确定性影响的消除[77],然而,海面观测构型改变在另一方面有利于提高海底定位精度[73]。有学者在同步几何确定算法[78]的基础上提高了海底定位精度(在2倍的标准差时小于1 m)[74];但该学者主要描述了浮标上GNSS-声呐系统的技术问题[74],未过多地讨论这些系统的准确性评估问题。有学者使用松弛系泊浮标对GNSS声学测量的定位精度进行了评估[79]。
除单浮标系统外,已有研究采用多浮标系统的形式获得水平梯度变化,进而提高海底基准坐标的准确性[80]。为了利用浮标间的基线信息,有学者提出了一种浮标间基线约束的联合平差方法,仿真结果表明,该方法的定位精度比不考虑浮标间的基线信息提高了24%~53%[81]。
需要指出,海面浮标系统采用太阳能供电,若进一步解决海底的供电问题,该系统可实现海面与海底变化实时连续监测,并通过卫星通信可将监测信息传输到岸基中心,从而实现海啸预警。然而,该系统目前主要依靠海流和风浪实现漂移式观测,机动性相对较差,因而海底定位精度也会受到一定限制。因此,未来发展微动力浮标,有望实现在不影响海面变化监测的同时,改善海面声呐测线几何构型,从而提高海底控制网定位精度。同时,当海面浮标具备无线电或卫星通信功能时,可将GNSS-声呐及相关海洋环境参数传输到数据中心,从而实现海平面变化监测、海底构造和形变及海洋环境等海洋综合监测。该系统面临的挑战主要是近海社会经济活动对该观测系统的生存性造成一定影响,因此,该系统主要适用于深远海空旷海域,或可发展隐蔽式下潜、自保护浮标系统。
3 GNSS声呐无人船观测系统
3.1 基于水面无人船的GNSS声呐观测系统
小型化海面无人船、无人艇可以代替海面大型测量船,是一种连续、便捷、智能、廉价的海面观测平台,特别是多海面无人船载体协同构成的GNSS-声呐无人观测系统,有望实现精度更高的海底大地测量定位[81]。基于水面无人船的GNSS-声呐无人观测系统如图5所示,其主要工作原理是水面无人船按照设计航线进行走航,期间水面无人船搭载的声呐设备对海底声学信标进行持续观测。其中,声信号收发时刻的海面换能器位置可根据GNSS提供的天线坐标信息进行杆臂和姿态等改正得到。基于声呐时延信息(或方位信息)和声速剖面信息,实现对海底信标的定位。图中USBL表示超短基线(ultra-short baseline)。

图5 GNSS-声呐无人船系统
在基于无人船的GNSS声呐无人观测系统中,水面无人船通常搭载GNSS天线、USBL定位模块、惯性单元。其中,GNSS天线与USBL模块直接相连,可降低大型科考船的海面GNSS天线与浸水端声学设备间的杆臂测量难度;惯性单元可提供三维姿态信息,用于GNSS天线坐标到USBL声学基阵坐标的精确转化。USBL定位的基本原理是声学阵列中心发射器向目标应答器发射声学询问信号,应答器接收到询问信号后反馈应答信号,据此测量基阵阵元间接收到反馈信号的传播时间差或相位差,并基于平面波近似原理,计算目标在声学基阵坐标系下的相对位置。
以法国研制的GNSS声呐无人观测系统为例。该系统采用法国艾克斯蓝公司(Ixblue)全球声学定位系统(global acoustic positioning system,GAPS)M7型号超短基线,声学基阵由中心发射器和互相间距21 cm的4个水听器构成,信号频率为26 kHz,测量间隔为0.8 s,在信噪比优于20 dB条件下可实现2 cm测距精度和0.03°测角精度[82]。为获得海底基准站的绝对位置,通常需要进行船系、基阵系以及大地坐标系之间的严格校准。为了坐标系校准,水面无人船以海底目标点为中心进行顺向、逆向绕圈观测的短时观测(如20~30 min)。此外,该系统还包括静态斜距模式和静态垂距模式下的长时观测。欧洲学者在法国布雷斯特湾的浅海实验表明,在水深40 m环境下,利用2 d内采集的多组观测时长约为20 min的数据集,可获得5 cm的海底应答器坐标重复观测精度[82]。
基于USV平台的GNSS-声呐系统对于改善海底大地测量具有重要参考价值,除了可以获取时间频次更高和空间分别更密集的GNSS-声呐观测外,未来可将多个USV平台以及母船组合起来,即部署水面无人船编队,有望实现更高精度的海底大地测量定位和更高时空分辨率的海洋声速场反演,同时提高海洋PNT网络的立体化服务能力。该系统虽然机动性强、作业效率高,但其主要缺点主要是长期自主生存能力、长距离自主迁徙能力还有待提高,包括复杂海况及能源供给受限情况下的自治维持问题。
3.2 基于波浪滑翔机的GNSS声呐观测系统
解决无人船生存能力和迁徙能力的重要途径是采用海面波浪滑翔机实施海底大地控制网观测。如图6所示,波浪滑翔机一般由水面船和水下滑翔机动力系统以及连接二者的柔性缆绳组成。水面船由海浪波谷运动到波峰,通过缆绳拉动水下动力系统上升,串列水翼顺时针被动俯仰转动产生向前的推力,通过缆绳拉动水面船向前运动;类似地,当水面船由波峰向波谷运动,此时水下驱动系统依托自身重力向下运动,串列水翼逆时针被动俯仰转动产生向前的推力,拉动水面船向前运动。

图6 基于波浪滑翔机的GNSS-声呐系统
目前,美国自动化机器人公司(Liquid Robotics)是研究波浪能滑翔机的主要研发机构,具备样机研制能力,相继推出SV2和SV3型号,其物理参数和航行性能如表2[83-84]所示,其中SV3型号船有行驶了1 a时间、行程约12874.752 km的记录。我国自2014年研制出“黑珍珠”“海哨兵”和“海鹞号”等波浪滑翔器,其中“海哨兵”最大航时320 d、航程14271.4 km。
表2 波浪滑翔机物理参数和航行性能信息
日本东北大学于2019年7月在青森海域开展了GNSS-声呐观测实验,波浪滑翔机在调查船甲板上完成配置后,开始对G02测区4个测站进行观测,先后进行了7月3日23:50—7月5日8:17(持续约32 h)和7月5日23:00—7月6日4:32(约5.5 h)共计2段连续测量。波浪滑翔机采集的数据原始波形分析表明,声信号背景噪声严重,信噪比较低,但经过高精度的互相关时延估计技术,有效削弱了多径效应引起的声学测时误差,处理后的各海底基站对应的声信号数据与采用海面大型测量船所获得的声学数据质量相当。GNSS-声呐观测数据解算结果表明,基于滑翔机观测的阵列中心平均定位结果优于10 cm,各历元定位序列标准差在北方向和东方向分别为7.0和6.1 cm。该实验验证了基于海面波浪滑翔机进行厘米量级的海底大地测量定位的可行性,对开展高精度、长航时GNSS-声呐无人观测具有重要参考价值。
需要指出,波浪滑翔机平台虽然机动性较差,但长期生存能力极强,因此基于波浪滑翔机的GNSS-声呐观测系统对于发展大规模海底大地控制网自动巡检和定期观测维护具有很大潜力,是高机动海面无人船/艇的有效补充。
4 GNSS声呐无人机观测系统
无人机(unmanned aerial vehicle,UAV)具有制造成本低、运营成本低和高机动性等优点,在海洋监测、水下通信、海上生产等领域发挥着重要的作用[85-87]。无人机大致分为小型直升机和大型飞机。小型直升机具有短距离飞行能力、高机动性、小载荷能力,适合开展定期定点观测、多点观测,以及不需要船舶的近距离有限工作等,例如执行抛弃式快速温盐深仪剖面观测,辅助海洋网络数据收集和传输以及海面基站与水下UAV进行通信或联合作业等[86-88]。该类无人机即使在较恶劣的环境仍能运行(风速约5~10 m/s),不足之处在于飞行距离和有效载荷能力或遥感控制并不能满足远距离、长时间作业的要求,若要对离岸10 km以上的区域进行作业,需要配备汽油发动机或类似设备。
大型飞机具有远距离飞行能力、低机动性、大载荷能力。由于飞行距离的限制,小型无人机不能用于自主进行海底大地测量观测(目标深度1000 m或以上)。因此,需要一种可在海面上起飞和降落的浮动无人机。为实现长远距离飞行,其有效载荷重量需要远低于船舶和浮标的载荷。相比于船舶观测,这种无人机在制造和燃料成本方面具有显著优点,并且能够快速到达观察地点。
如图7所示,假若将海底大地测量观测设备安装在无人机上,则可研制兼顾海底控制点投放、标校观测、维护更新的GNSS-声呐无人机观测系统。该系统由浮动无人机作为主要控制中心,配备GNSS定位系统(2根GNSS天线、1套姿态测量设备,用于获取无人机的位置和姿态)、远程飞行控制设备(通过岸基中心对无人机进行备航控制、航线设计以及系统监控)和声学交互设备(用于海底控制网通信测距)或其他作业设备(如声学信标等)。其作业模式如下:
1)无人机自动导航到目标点。
2)无人机海上悬停或海面着陆。
3)无人机声学信标投放或对已有控制网进行观测数据采集。
4)无人机作业结束,然后自动返回基地。
图7 GNSS-声呐无人机观测系统
在海底大地测量方面,已有研究基于无人机的GNSS-声呐观测实现高频、近实时部署和低成本的海底大地测量观测[16]。该研究中使用的无人机为日本太空娱乐实验室(Space Entertainment Laboratory)有限公司研制的浮动平面无人机HAMADORI6000,配备了专门开发的轻便紧凑的观测设备,如图8所示。该无人机能够飞行750 km,最长飞行8 h,巡航飞行速度约为80 km/h或更高,可在海面上进行2节高速移动,即使是强流环境下也能获得观测结果。无人机GNSS-声呐观测设备主要有:GNSS设备为u-blox Neo-M8N GNSS接收机和ANT-2B天线;姿态计和飞行控制器分别是惯性测量单元(ICM-20689,TDK InvenSense)和Holybro Pixhawk 4;声呐是一个小型圆柱形换能器(ITC-3013,Gavial ITC);处理数据个人电脑(personal computer,PC)是一个NucBox (GMKtec),带有Inter Celeron J4125处理器;观测设备有效载荷总重量约为6 kg,明显轻于一般的GNSS-声呐设备。在观测期间,飞行、海面导航和声音传输由飞行控制器Holybro Pixhawk 4远程控制。实验结果表明,基于无人机的GNSS-声呐反演地壳运动的各分量值与基于船舶的GNSS-声呐值基本一致。
图8 GNSS-声呐无人机传感器配置
需要指出,为了实现基于无人机的厘米级精度GNSS-声呐观测,需要双频GNSS天线;对于翼型无人机,天线必须安装在远离机翼的位置,以免被机翼和其他部件遮挡。另外,还需要考虑无人机声呐系统部署深度问题,避免海面附近产生的气泡对通信导航信号的影响。此外,基于无人机平台的GNSS-声呐观测系统难免受海面复杂环境以及无人机本身噪声的影响,从而影响GNSS-声呐观测质量。
5 结束语
正在快速发展的海洋智能化无人系统有望革新GNSS-声呐组合观测技术,大幅降低传统基于大型测量船的海底大地控制网建设与运行维护成本。此外,对于传统调查船观测平台,GNSS、姿态和声呐的安装只能被动适配调查船,而无人观测系统标准化程度高,易于实现GNSS、姿态和声呐测量单元的一体化集成。此外,无人系统集群可进一步提高GNSS-声呐观测效率,改善海面观测几何构型,从而有望极大地提高海底大地控制网的定位精度。
海面浮标、无人船、波浪滑翔机、无人机等观测平台的自治能力、机动能力和生存能力各有不同,用户可根据海底大地控制网的不同用途,选择不同的观测平台,构建灵活、弹性、智能的无人观测装备体系。例如,对于海底构造运动与形变实时监测应用,可选择海面自治浮标系统,而应急保障适合采用无人机系统。建议我国构建多种无人技术综合的弹性化海底大地测量建设、观测和维护技术体系,革新现有海底大地控制网观测维护技术,为海洋PNT网络建设与维护提供低廉、弹性、智能的多技术综合解决方案。具体发展方向归纳如下:
1)对于长期驻留的GNSS-声呐浮标观测系统,有望实现海底控制网连续跟踪监测,但当使用单个浮标时,海面观测构型受系统设计、海流以及气象等多种条件限制,未来如何利用海流以及气象条件,甚至考虑动力驱动,设计一个自治性更好、可控性更好的智能浮标观测系统,仍然需要开展大量研究。此外,如何利用多枚浮标协调观测,长期保持一个良好的海面观测构型,也是需要研究的课题。
2)对于无人船GNSS-声呐观测系统,由于其具有很好的机动性,未来有望通过多载体协同观测,提高海底控制网观测效率以及海底大地控制网定位精度。
3)对于波浪滑翔机平台,其具有强生存能力,但机动性差,亦适用于常规性海底大地控制网巡检与复测作业。
4)对于多栖无人机系统,由于其机动性强、作用距离远,是一种极具潜力的高效敏捷的海底大地控制网观测技术。
智能无人观测系统在提高观测效率、降低作业成本的同时,也面临一系列挑战,例如,平台姿态稳定性差,姿态测量精度要求相对较高,且GNSS天线-声呐换能器连接臂杆长度受限,导致声呐观测易受海表层复杂信号折射影响。此外,无人系统难以实施海洋声速剖面测量,这对GNSS-声呐观测数据处理带来诸多挑战,例如需要发展免声速剖面的厘米级精度海底大地测量定位模型[71]。
[1] ALTAMIMI Z, BOUCHER C, WILLIS P. Terrestrial reference frame requirements within ggos perspective[J]. Journal of Geodynamics, 2005, 40(4): 363-374.
[2] BÜRGMANN R, CHADWELL D. Seafloor geodesy[J/OL]. Annual Review of Earth and Planetary Sciences, 2014, 42: 509-534.
[3] 吴立新, 陈朝晖, 林霄沛, 等. “透明海洋”立体观测网构建[J]. 科学通报, 2020, 65(25): 2654-2661.
[4] 吴立新, 荆钊, 陈显尧, 等. 我国海洋科学发展现状与未来展望[J]. 地学前缘, 2022, 29(5): 1-12.
[5] 杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8.
[6] 杨元喜, 刘焱雄, 孙大军, 等. 海底大地基准网建设及其关键技术[J]. 中国科学:地球科学, 2020, 50(7): 936-945.
[7] SPIESS N F. Suboceanic geodetic measurements[J]. IEEE Transactions on Geoscience and Remote Sensing, 1985(4): 502-510.
[8] SPIESS N F, CHADWELL D C, HILDEBRAND A J, et al. Precise GPS/acoustic positioning of seafloor reference points for tectonic studies[J]. Physics of the Earth and Planetary Interiors, 1998, 108(2): 101-112.
[9] SPIESS N F, LOUGHRIDGE S M, MCGEHEE S M, et al. An acoustic transponder system[J]. Navigation, 1966, 13(2): 154-161.
[10] SPIESS F N. Acoustic techniques for marine geodesy[J]. Marine Geodesy, 1980, 4(1): 13-27.
[11] KENJI Y, KEIICHI T, SOTA T, et al. Interplate locking condition derived from seafloor geodetic observation in the shallowest subduction segment at the central nankai trough, Japan[J]. Geophysical Research Letters, 2017, 44(8): 3572-3579.
[12] HONSHO C, KIDO M, TOMITA F, et al. Offshore postseismic deformation of the 2011 tohoku earthquake revisited:Application of an improved gps‐acoustic positioning method considering horizontal gradient of sound speed structure[J]. Journal of Geophysical Research:Solid Earth, 2019, 124(6): 5990-6009.
[13] EVANS E L, MINSON S E, CHADWELL C D. Imaging the next cascadia earthquake: Optimal design for a seafloor gnss-a network[J]. Geophysical Journal International, 2021, 228(2): 944-957.
[14] 杨元喜, 薛树强, 徐天河, 等. 海洋大地测量基准与水下导航[M]. 北京:科学出版社, 2022: 1-145.
[15] IINUMA T, KIDO MI, OHTA Y, et al. Gnss-acoustic observations of seafloor crustal deformation using a wave glider[J]. Frontiers in Earth Science, 2021, 9.
[16] YOKOTA Y, KANEDA M, HASHIMOTO T, et al. Experimental verification of seafloor crustal deformation observations by uav-based GNSS-a[J]. Scientific Reports, 2023, 13(1): 4105-4105.
[17] 杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5): 505-510.
[18] 刘经南, 赵建虎, 马金叶. 通导遥一体化深远海PNT基准及服务网络构想[J/OL]. 武汉大学学报(信息科学版), 2022, 47(10): 1523-1534.
[19] TOSHIYA F, SHUICHI K, TETSUO N, et al. The 2011 tohoku-oki earthquake: Displacement reaching the trench axis[J]. Science, 2011, 334(6060): 1240-1240.
[20] MARIKO S, TADASHI I, NAOTO U, et al. Displacement above the hypocenter of the 2011 tohoku-oki earthquake[J]. Science, 2011, 332(6036): 1395-1395.
[21] TAKAHASHI N, ISHIHARA Y, FUKUDA T, et al. Buoy platform development for observation of tsunami and crustal deformation[M]. HASHIMOTO M. International Symposium on Geodesy for Earthquake and Natural Hazards (GENAH). Springer International Publishing, 2015: 97-103.
[22] TAKAHASHI N, IMAI K, ISHIHARA Y, et al. Real-time and on-demand buoy observation system for tsunami and crustal displacement[C]// AGU Fall Meeting Abstracts. 2017: NH23A-0220.
[23] KATO T, TERADA Y, TADOKORO K, et al. Developments of GNSS buoy for a synthetic geohazard monitoring system[J]. Proc Jpn Acad Ser B Phys Biol Sci, 2022, 98(2): 49-71.
[24] 原张杰. 考虑实时避障的水面无人艇自主航行控制研究[D]. 哈尔滨:哈尔滨理工大学, 2023.
[25] 范佳佳. 面向目标警卫的多无人艇协同控制方法研究[D]. 哈尔滨:哈尔滨工程大学, 2022.
[26] SURUI X, MARK Z, GLENN S, et al. Shallow water seafloor geodesy with wave glider-based GNSS-acoustic surveying of a single transponder[J]. Earth and Space Science, 2023, 10(10). https://doi.org/10.1029/2023EA003043.
[27] FLORIAN P, HEIDRUN K, DIETRICH L, et al. Measuring tectonic seafloor deformation and strain-build up with acoustic direct-path ranging[J]. Journal of Geodynamics, 2019, 124: 14-24.
[28] WEST G, KOPP H. The geosea (geodetic earthquake observatory on the seafloor) project[C]// The Institute of Electrical and Electronic Engineers(IEEE). OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO): IEEE, 2018: 1-7.
[29] FOSTER J H, ERICKSEN T L, BINGHAM B. Wave glider–enhanced vertical seafloor geodesy[J]. Journal of Atmospheric and Oceanic Technology, 2020, 37(3): 417-427.
[30] AKIRA A, TETSUICHIRO Y. Centimeter-level positioning on the seafloor[J]. Proceedings of the Japan Academy, Series B, 2001, 77(1): 7-12.
[31] 薛树强, 杨元喜, 肖圳, 等. 全球导航卫星系统-声呐组合观测模型分类体系[J/OL]. 哈尔滨工程大学学报. [2023-12-19]. https://link.cnki.net/urlid/23.1390.U.20231107.1129.002.
[32] 张小红, 胡家欢, 任晓东. PPP/PPP-RTK新进展与北斗/GNSS PPP定位性能比较[J]. 测绘学报, 2020, 49(9): 1084-1100.
[33] 刘绍龙. 基于安卓移动终端的GNSS原始观测值分析及定位性能研究[D]. 赣州: 江西理工大学, 2021.
[34] 徐彦田, 刘巍峰, 李玉星, 等. BDS/GPS/GAL智能手机RTK动态定位算法[J].无线电工程, 2023, 53(5): 1061-1067.
[35] DENG C L, TANG W M, LIU J N, et al. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system[J]. GPS Solutions, 2014, 18(3): 375-386.
[36] ODOLINSKI R, TEUNISSEN PJG, ODIJK D. Combined GPS+BDS for short to long baseline RTK positioning[J]. Measurement Science and Technology, 2015, 26(4): 045801.
[37] TERUYUKI K, YUKIHIRO T, MASAO K, et al. Real-time observation of tsunami by rtk-gps[J]. Earth, Planets and Space, 2000, 52(10): 841-845.
[38] 李博峰, 苗维凯, 陈广鄂. 多频多模GNSS高精度定位关键技术与挑战[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1769-1783.
[39] TEUNISSEN P J G, KHODABANDEH A. Review and principles of ppp-rtk methods[J]. Journal of Geodesy, 2015, 89(3): 217-240.
[40] 高周正. 多模GNSS PPP/INS组合系统算法与应用研究[D]. 武汉:武汉大学, 2016.
[41] WANG Zhiyu, LI Zishen, WANG Liang, et al. Assessment of multiple GNSS real-time ssr products from different analysis centers[J]. ISPRS International Journal of Geo-Information, 2018, 7(3): 85-85.
[42] DOW M J, NEILAN RE, RIZOS C. The international GNSS service in a changing landscape of global navigation satellite systems[J]. Journal of Geodesy, 2009, 83(3-4): 191-198. DOW J M.
[43] 李星星. GNSS精密单点定位及非差模糊度快速确定方法研究[D]. 武汉:武汉大学, 2013.
[44] 李盼. GNSS精密单点定位模糊度快速固定技术和方法研究[D]. 武汉:武汉大学, 2016.
[45] 张小红, 左翔, 李盼. 非组合与组合PPP模型比较及定位性能分析[J]. 武汉大学学报(信息科学版), 2013, 38(5): 561-565.
[46] 袁运斌, 侯鹏宇, 张宝成. GNSS非差非组合数据处理与PPP-RTK高精度定位[J]. 测绘学报, 2022, 51(7): 1225-1238.
[47] GE M, GENDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of Geodesy, 2008, 82(7): 401-401.
[48] LAURICHESSE D, MERCIER F, BERTHIAS J P, et al. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination[J]. Navigation, 2009, 56(2): 135-149.
[49] GENG Jianghui, CHEN Xingyu, PAN Yuanxin, et al. A modified phase clock/bias model to improve PPP ambiguity resolution at wuhan university[J]. Journal of Geodesy, 2019, 93(10): 2053-2067.
[50] TERUYUKI K, YUKIHIRO T, KEIICHI T, et al. Development of GNSS buoy for a synthetic geohazard monitoring system[J]. Journal of Disaster Research, 2018, 13(3): 460-471.
[51] ROCKEN C, MERVART L, LUKES Z, et al. Testing a new network RTK software system[C]// Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004). Manassas, Virginia: The Institute of Navigation, Inc., 2004: 2831-2839[2023-11-15].
[52] DAI L, CHEN Y, LIE A, et al. StarFireTM SF3: Worldwide centimeter-accurate real time GNSS positioning[C/OL]// Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2016). Manassas, Virginia: The Institute of Navigation, Inc., 2016: 3295-3320[2023-11-15].
[53] 刘宏, 万立健, 陆亚英. 基于北斗卫星导航系统的远距离海洋工程高精度定位技术[J/OL]. 测绘通报, 2017(5): 62-66.
[54] LI B, ZHANG Z, ZANG N, et al. High-precision GNSS ocean positioning with BeiDou short-message communication[J]. Journal of Geodesy, 2019, 93(2): 125-139.
[55] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报, 2010, 39(1): 1-6.
[56] YANG Yuanxi, GAO Weiguang, GUO Shuren, et al. Introduction to BeiDou-3 navigation satellite system[J]. Navigation, 2019, 66(1): 7-18.
[57] LIU Yan, YANG Cheng, ZHANG Mengni. Comprehensive analyses of ppp-b2b performance in China and surrounding areas[J]. Remote Sensing, 2022, 14(3): 643-643.
[58] 李景森, 薛树强, 肖圳, 等. GNSS/声呐组合观测臂长改正不确定度评估[J/OL]. 武汉大学学报(信息科学版). [2023-12-19]. https://doi.org/10.13203/j.whugis20220673.
[59] 刘焱雄, 彭琳, 吴永亭, 等. 超短基线水声定位系统校准方法研究[J]. 武汉大学学报(信息科学版), 2006, 31(7): 610-612.
[60] 刘慧敏, 陆凯, 单瑞, 等. USBL安装偏差联合模型构建与校准方法[J]. 中国惯性技术学报, 2023, 31(2): 157-164.
[61] 王薪普, 薛树强, 曲国庆, 等. 水下定位声线扰动分析与分段指数权函数设计[J]. 测绘学报, 2021, 50(7): 982-989.
[62] CHEN Guanxu, LIU Yang, LIU Yanxiong, et al. Adjustment of transceiver lever arm offset and sound speed bias for gnss-acoustic positioning[J]. Remote Sensing, 2019, 11(13): 1606.
[63] 马越原, 杨元喜, 曾安敏, 等. 顾及偏移参数先验信息的海底控制点贝叶斯估计模型[J]. 武汉大学学报(信息科学版), 2023, 48(9): 1465-1472.
[64] MATSUMOTO Y, FUJITA M, ISHIKAWA T. Development of multi-epoch method for determining seafloor station position[J]. Technical Bulletin on Hydrography and Oceanography (Japan), 2008, 26: 16-22.
[65] FUJITA M, SATO M, YABUKI T. Development of seafloor positioning software using inverse method[J]. Report of Hydrographic and Oceanographic Researches, 2004, 22: 50-56.
[66] MASAYUKI F, TADASHI I, MASASHI M, et al. GPS/Acoustic seafloor geodetic observation:Method of data analysis and its application[J]. Earth, Planets and Space, 2006, 58(3): 265-275.
[67] RYOYA I, KEIICHI T, MASATAKA A, et al. A new GPS-acoustic method for measuring ocean floor crustal deformation: Application to the nankai trough[J]. Journal of Geophysical Research: Solid Earth, 2008, 113(B2).
[68] YUSUKE Y, TADASHI I, WATANABE S I. Gradient field of undersea sound speed structure extracted from the gnss-a oceanography[J]. Marine Geophysical Research, 2019, 40(4): 493-504.
[69] YUSUKE Y, TADASHI I. Gradient field of undersea sound speed structure extracted from the gnss-a oceanography: GNSS-A as a sensor for detecting sound speed gradient[J]. SN Applied Sciences, 2019, 1(7): 1-11.
[70] WATANABE S I, ISHIKAWA T, YOKOTA Y, et al. GARPOS: Analysis software for the GNSS-A seafloor positioning with simultaneous estimation of sound speed structure[J]. Frontiers in Earth Science, 2020, 8: 597532.
[71] XUE Suqiang, LI Baojin, XIAO Zhen, et al. Centimeter-level-precision seafloor geodetic positioning model with self-structured empirical sound speed profile[J/OL]. Satellite Navigation, 2023, 4(1): 30.
[72] YOSHINORI S, KAZUTOSHI S, MASANORI Y, et al. PWV retrieval over the ocean using shipborne GNSS receivers with madoca real-time orbits[J]. SOLA, 2016, 12(0): 265-271.
[73] NARUMI T, YASUHISA I, HIROSHI O, et al. New buoy observation system for tsunami and crustal deformation[J]. Marine Geophysical Researches, 2014, 35(3): 243-253.
[74] MOTOYUKI K, MISAE I, YUSAKU O, et al. Onboard realtime processing of GPS-acoustic data for moored buoy-based observation[J]. Journal of Disaster Research, 2018, 13(3): 472-488.
[75] TAKIZAWA K, YAMAMOTO S, TOYOSHIMA M, et al. Channel modeling on satellite communications for GNSS buoy in the ocean[J]. IEICE Technical Report, 2017, 117(174): 99-102.
[76] MOTOYUKI K. Detecting horizontal gradient of sound speed in ocean[J]. Earth, Planets and Space:EPS, 2007, 59(8): 33-36.
[77] MOTOYUKI K, HIROMI F, SATOSHI M, et al. Seafloor displacement at kumano-nada caused by the 2004 off kii peninsula earthquakes, detected through repeated GPS/acoustic surveys[J]. Earth, Planets and Space, 2006, 58(7): 911-915.
[78] CHIE H, MOTOYUKI K. Comprehensive analysis of traveltime data collected through GPS-acoustic observation of seafloor crustal movements[J]. Journal of Geophysical Research:Solid Earth, 2017, 122(10): 8583-8599.
[79] MISAE I, MOTOYUKI K, CHIE H, et al. Assessment of directional accuracy of GNSS-acoustic measurement using a slackly moored buoy[J]. Progress in Earth and Planetary Science, 2019, 6(1): 1-14.
[80] MUKAIYAMA H. Multi buoy system observation for GPS/A seafloor positioning[C]// AGU Fall Meeting Abstracts. 2014, 2014: G11B-0487.
[81] SUN Z, WANG Z, NIE Z, et al. Improved GNSS/acoustic underwater positioning with between-buoy baseline constraint[J/OL]. Journal of Surveying Engineering, 2023, 149(4): 04023012.
[82] SAKIC P, CHUPIN C, BALLU V, et al. Geodetic seafloor positioning using an unmanned surface vehicle-contribution of direction-of-arrival observations[J]. Frontiers in Earth Science, 2021, 9: 636156.
[83] THOMSON J, GIRTON J. Sustained measurements of southern ocean air-sea coupling from a wave glider autonomous surface vehicle[J]. Oceanography, 2017, 30(2): 104-109.
[84] GRARE L, STATOM N M, PIZZO N, et al. Instrumented wave gliders for air-sea interaction and upper ocean research[J]. Frontiers in Marine Science, 2021, 8: 664728.
[85] CHRISTINE E, MILES P, ALEC D, et al. Aerial and underwater sound of unmanned aerial vehicles (UAV)[J]. Journal of Unmanned Vehicle Systems, 2017, 5(3): 92-101.
[86] MA Ruofei, WANG Ruisong, LIU Gongliang, et al. UAV-Assisted data collection for ocean monitoring networks[J]. IEEE Network, 2020, 34(6): 250-258.
[87] YOKOTA Y, MATSUDA T. Underwater communication using UAVs to realize high-speed auv deployment[J]. Remote Sensing, 2021, 13(20): 4173-4173.
[88] 于燕婷, 许江宁, 林恩凡, 等. 单信标水声定位技术研究现状及应用展望[J]. 导航定位学报, 2022, 10(2): 13-20.
Review of unmanned observation systems for seafloor geodetic network
XUE Shuqiang1,2, YANG Cheng3, ZHAO Shuang1, XIAO Zhen1, LI Jingsen1, BIAN Jiachao1
(1. Chinese Academy of Surveying and Mapping, Beijing 100039, China;2. State Key Laboratory of Geographic Information Engineering, Xi’an 710054, China;3. School of Land Science and Technology, China University of Geosciences, Beijing 100083, China)
Aiming at the problem that the observation and maintenance of the seafloor geodetic control network usually adopts a global navigation satellite system (GNSS)-acoustic combined observation system based on large measurement ships, which not only leads to high observation and maintenance costs of the control network, but also limits the frequency of remeasurement and global large-scale applications of the control network, the paper reviewed unmanned observation systems for seafloor geodetic network: it was pointed out that in recent years, the GNSS-acoustic combined observation system based on unmanned systems such as sea buoys, unmanned ships, wave gliders and unmanned aerial vehicles has developed rapidly, greatly reducing the observation cost of traditional seafloor geodetic control network and improving the observation and maintenance efficiency of seafloor control network; moreover, the research progress of GNSS-acoustic unmanned observation systems at home and abroad was described, and the advantages and disadvantages of existing unmanned observation platforms were analyzed; finally, and the challenges and possible development directions of GNSS-acoustic unmanned observation system were proposed.
seafloor geodesy; global navigation satellite system (GNSS)-acoustic; unmanned systems; underwater positioning
薛树强, 杨诚, 赵爽, 等. 海底大地控制网无人观测系统研究进展[J]. 导航定位学报, 2023, 11(6): 8-21.(XUE Shuqiang, YANG Cheng, ZHAO Shuang, et al. Review of unmanned observation systems for seafloor geodetic network[J]. Journal of Navigation and Positioning, 2023, 11(6): 8-21.)DOI:10.16547/j.cnki.10-1096.20230602.
P228
A
2095-4999(2023)06-0008-14
2023-11-14
崂山实验室科技创新项目(LSKJ202205100,LSKJ202205105);国家重点研发计划项目(2020YFB0505802);国家自然科学基金重点基金(41931076);中国测绘科学研究院基本科研业务费项目(AR2313)。
薛树强(1980—),男,山东东营人,博士,研究员,研究方向为大地测量数据处理理论与方法。
