基于多源激光点云数据的大型互通式立交桥及道路实景建模
2023-02-23王甜甜田雨农石增宇
王甜甜 张 彦 田雨农 石增宇
(1. 北京市测绘设计研究院, 北京 100038;2. 城市空间信息工程北京市重点实验室, 北京 100038)
0 引言
随着技术的不断发展和城市规划需求的不断提高,实景三维城市模型作为数字城市、智慧城市和许多地理信息应用领域的基础数据,越来越成为研究和应用的热点。在城市中,形态多样、空间结构复杂的立交桥是道路网中重要的连接枢纽。二三维一体化模型不仅能够表现出大型互通式立交桥的复杂空间结构,更能表示其三维拓扑关系,为立交桥及其桥下空间提供了重要特征,包括平滑连接的匝道,桥下空间设施,以满足桥上桥下空间梳理、设施管理、设计和规划交通基础设施的需求。因此,立交桥的三维模型也逐渐成为数字化城市建设中非常重要的基础内容之一,其对于景观设计、空间分析以及交通导航等都具有重要意义[1]。
此前,大型立交桥建模在应用中多依赖计算机辅助设计(computer aided design,CAD)软件进行人工手动建立三维模型,利用图像计算物体参数,所建模型可以完整地表达物体的三维信息,但这种方式不仅精度受限且耗费大量的人力和时间成本[2-3]。基于影像数据的三维建模方法,通过测图软件利用航空摄影测量的立体像对获得建筑物的实体白模[4-5]。这种三维重建方式具备良好的现势性且所含的信息丰富,但也存在一定的短板,比如遥感影像数据量大导致对计算机图像处理能力要求高、建筑物纹理比较粗糙等。当三维激光扫描仪的激光束打在目标物表面时,由于不同的物体具有不同的反射率,因此不同物体的点云数据具有不同的强度信息和回波信息[6]。强度信息可以在一定程度上反映目标的辐射能力,对目标表面材质分类起到辅助作用;回波信息可以表征激光的穿透能力,激光束的回波次数可以为植被和建筑类的区分提供帮助。因此,激光点云扫描和处理技术在环境检测、三维城市建模、地形测绘等诸多领域逐渐得到广泛的应用[7]。同时,由于移动激光扫描技术能够提供高精度、高密度、三维地理参考点云覆盖的道路环境,基于激光雷达(light detection and ranging, LiDAR)进行道路建模、立交桥建模也逐渐得到了一定的关注[8-9]。
自2017年以来,北京市深化推进“疏解整治促提升”专项行动,以首都发展为统领,优化首都发展布局,全面提升城市发展质量。随着专项行动的开展,桥下空间已逐渐成为重点和难点任务。本项目以天宁寺桥为试验区建立三维实景模型,更直观的为桥下空间治理提供所需的实景专题数据。本文从生产应用的角度出发,针对大型互通式立交桥的特点,融合多源激光点云数据,结合3D Max实现半自动化大型互通式立交桥建模。
1 项目概况及技术路线
1.1 项目及测区概况
天宁寺桥是一座建于1981年的互通式立交桥,位于二环路上西便门和广安门之间,既是二环路立交桥,也是跨西护城河桥。桥区由17座跨路和跨河桥梁组成,包括桥面在内呈三层立体交叉状,最上层为南北四车道的二环主路,全长600 m;中间为莲石路东西四车道;最下面为辅路、匝道。桥区周围环境多样复杂,有西护城河、明城墙遗址公园、环卫公司、公交场站、停车场等多家单位和公共设施。
1.2 技术方法与流程
本项目实施前,先对桥区附近进行踏勘,并进行了点云数据采集实验、结构线采集实验等多项准备工作。考虑到各个采集平台在稳定性、精度以及易操作等方面各自的优势,根据现场环境和技术方法验证为此次点云数据采集选择了车载、背包和手持三种扫描方式,以更高效、更灵活的方式获取高精度的点云数据。同时,本项目也针对桥区的主路、辅路、匝道、桥下等各个部分分别制定了合适的数据采集策略以及详细的路线规划。技术设计流程如图1所示。
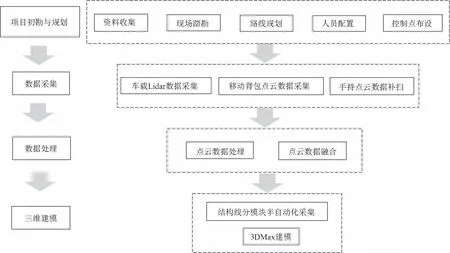
图1 技术设计流程图
2 车载、背包及手持LiDAR技术
近年来,随着全球定位系统(global positioning system,GPS)/惯性导航系统(inertial navigation system,INS)组合导航定位技术和惯性测量单元性能的不断提升,以及激光扫描仪抗干扰能力的提高,国内外各种移动测量系统层出不穷。
2.1 车载激光扫描系统及主要优势
车载激光扫描系统是在车辆上,集成激光扫描仪、GPS、INS、CCD相机等高精度导航装置,在车载平台行驶过程中动态采集大面积目标物的表面信息。激光扫描仪通过激光束发射到反射回激光扫描仪的时间差获取其到目标物的距离;GPS和惯性测量单元可以提供高精度的实时定位定姿信息[10]。
本项目以移动测量系统(SSW)车载LiDAR获取点云数据,车载LiDAR在道路这种呈带状分布目标物的信息采集上具备较多优势:①数据采集效率高,车载系统在沿道路单向或双向往返行驶过程中动态采集数据,大大减少外业作业时间;②信息丰富,车辆顶部的激光扫描仪和CCD相机可以获取360。全景纹理信息;③数据精度满足带状信息采集精度,最远测距可达300 m,标称测距精度2 cm/100 m,点云精度最高可达1 cm[11-12];④天宁寺桥主干道车和人流量较大,车载激光测量系统不受光线限制,可在夜间作业;⑤即使GPS信号失锁,在增加控制点的基础上采取往返扫描作业,也可获取较高精度的点云数据。
2.2 背包/手持式移动激光扫描系统及主要优势
背包/手持式移动激光扫描系统是以3D即时定位与地图构建(simultaneous localization and mapping,SLAM)技术为基础,集成多种传感器的可背负或手持的集成测量系统。本项目采用徕卡Pgasuse移动测量背包和徕卡BLK2GO手持激光扫描系统作为点云数据采集平台。Pgasuse移动背包测量系统可对运动平台的位姿进行估计,实现对环境的三维数字化,具有地面激光扫描系统和车载激光扫描系统无可比拟的优势:①抗干扰能力强,惯导结合,集成SLAM技术使其适用于在室内、地下等GPS信号缺失的环境下作业,受环境影响较小[13];②方便高效,背包移动测量系统轻便坚固,一次经过即可获取点云数据和现场照片,且能够在仅限人通行的区域作业。
徕卡BLK2GO手持激光扫描系统以手持的方式就可以对周围环境进行扫面记录,并获得三维点云和高清图像。另外,BLK2GO手持激光扫描仪相较于其他扫描仪也有其优势:其一,手持扫描系统具备更好的灵活性和高效性;其二,手持扫描系统依靠点云SLAM算法和相机的视觉定位追踪实现高精度自主定位,Grand SLAM双重定位技术相比传统的SLAM定位技术,极大地提高了定位的准确性,保证了三维点云数据的精度。
3 天宁寺桥点云数据采集及处理
3.1 外业数据采集
在数据采集工作中,本项目使用SSW车载扫描系统往返采集天宁寺桥区二环路主路、匝道及辅路的点云数据,历时三天总扫描长度超过100 km;通过Pegasus移动背包扫描系统采集西护城河两侧视野开阔地区的三维点云数据,共计两小时。另外,考虑灵活性和高效性,本项目使用BLK2GO手持扫描系统对桥下的环卫公司、公交场站、停车场等无卫星信号、狭窄以及桥下点云缺失的区域进行补充采集。
根据实际作业要求,考虑到三种平台采集点云数据融合精度要求,本项目统一采用北京市全球导航卫星系统(global navigation satellite system,GNSS)网络实时动态差分技术(real time kinematic,RTK)控制点作为基础控制。根据测区空间分布以及测量路线进行二次布控的控制点与周边控制点进行了四等水准联测,保证高程基准面的统一,提高点云整体测量精度。
3.2 内业数据处理
内业数据处理是三维激光扫描的核心,不同平台采集的数据在数据处理方面也存在差异。其中,手持点云数据可在REGISTER 360软件中实现全自动数据处理,无须太多人工干预,在实际生产中可大大节省人力和时间。车载点云数据处理主要分为数据预处理和点云处理两个方面,数据预处理主要包括扫描仪数据解算、影像数据解算和组合导航数据解析等;点云处理主要包括点云噪点去除、点云数据精简、坐标转换等,内业数据处理的结果会对后续点云融合以及三维模型精度产生重大的影响。天宁寺桥车载扫描局部点云数据如图2所示。

图2 天宁寺桥车载扫描点云数据(局部)
背包数据处理需要进行轨迹解算、坐标系建立、SLAM解算及点云处理等。另外,由于一些意外因素点云数据中会存在明显的坏点或部分数据点轻微偏离原始位置,因此在背包点云处理中去噪和平滑一般也是必须要进行的[14]。天宁寺桥背包扫描局部点云数据如图3所示。

图3 天宁寺桥背包扫描点云数据(局部)
点云数据融合是将SSW车载、Pgasuse背包和BLK2GO手持三维激光扫描系统获取的点云数据经过数据处理后,统一到一致的坐标系和las点云格式下,以车载点云数据为基准,通过点云配准获取天宁寺桥完整的点云数据。融合后的天宁寺桥点云数据,可清晰地显示主干道、辅路、连接干线和支线的匝道、道路标识、桥面底部结合梁、桥墩等地物,保证了天宁寺桥及其周围环境的完整性,最大限度地避免了数据“空洞”问题。
4 互通式立交桥半自动化三维建模
4.1 基于EPS软件的立交桥结构线半自动化采集
天宁寺桥结构线采集主要包括桥梁主体结构、道路附属设施、河道及附属设施三个方面。桥梁主体主要采集主路和辅路的道路面、人行道、桥护沿、桥板底部结合梁、桥墩、双向车道间的隔离带、匝道等;道路附属设施主要采集路面上的交通标志线、交通标志以及绿化带等;河道及附属设施主要采集河道及护坡、跨河孔桥、两岸绿化等。
本项目以EPS地理信息工作站为结构线采集平台,其三维测图板块可实现二三维联动,PCEditorHelper扩展模块可实现道路边线提取、标识线提取等半自动点云编辑功能。利用激光点云的特征和属性,对应相应的编码,EPS能够实现少量人工干预下,道路边线、道路标识线等物体的半自动化采集,并为后续建模提供便利。根据下一步三维建模的实际生产需求,桥板底部结合梁、桥墩、桥护沿等需要绘制横截面,EPS裁剪显示可为横截面的绘制隐藏目前不需要的点云。
道路边线及道路标识线半自动化采集步骤:①在EPS中打开扩展模块加载PCEditorHelper,加载融合后的激光点云数据;②选择绘制方案和算法,如方案管理选择道路直行箭头,算法选择道路箭头定位点搜索,设置搜索参数;③在点云数据箭头尾部向前拉出搜索框,算法依据绘制方向识别交通标线轮廓特征,通过方向纠正即可生成正确的直行箭头。天宁寺桥区各类结构线绘制完成后,通过EPS脚本管理器实现格式转换,形成完整的三维矢量数据库。
4.2 三维实体模型的建立
本项目基于半自动化采集的DWG格式矢量线,在3D Max软件环境下实现了天宁寺桥实景建模。目前,3D Max是较为广泛使用的三维建模软件,其具备操作简便,细节表现性能好,模型精细化程度高、渲染效果好等优势[15]。3D Max建模方式主要包括三类:以二维为基础转三维建模;二维和二维通过放样生成三维模型;利用布尔命令可以将两个及以上三维生成新的三维模型。
将融合后的点云与矢量线导入3D Max,利用可编辑的矢量点、线、面分别对桥梁的各个部分进行建模。对于立交桥的车道面、交通标识线、绿化带、匝道以及隔离带等部分,以结构线为基础形成闭合线,以点云为参考通过挤出功能对桥面等物体向下或向上拉长高度;孔桥、桥辆护沿等具有横截面结构线的物体采用放样命令,以道路边线为路径,形成相应的三维实体;桥墩模型的建立是以底部横截面为基础,通过向上挤出、倒角等操作完成。另外,天宁寺桥河道两边护坡上的几处台阶建模主要使用创建几何体下的楼梯命令,以点云高程为依据,适当调整各项参数即可实现。各单模型完成后,通过Photoshop对全景照片进行处理,最后进行贴图,天宁寺桥建模完成。天宁寺桥建模效果如图4、图5所示。
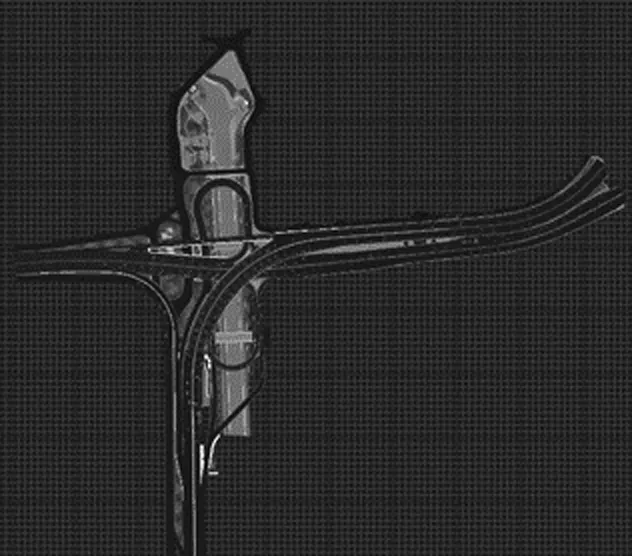
图4 天宁寺桥三维建模效果图
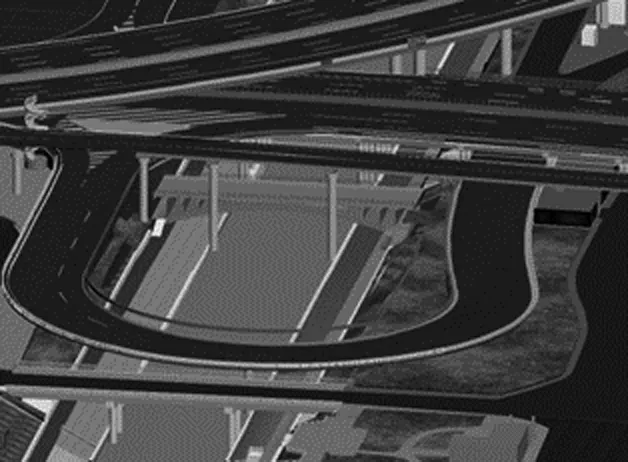
图5 跨河孔桥建模效果图
5 结束语
针对桥下空间对立交桥三维模型的需求,本文基于三维激光扫描技术,从激光扫描系统选取、外业数据采集、内业数据处理以及点云数据三维建模等方面进行了详细的分析和实验。实践证明,融合车载、背包以及手持激光扫描技术应用于大型互通式立交桥建模是可行的,融合后的点云数据在一定程度上解决了数据“空洞”问题,进一步提高了以点云数据为基础建立三维模型的精度,同时天宁寺桥建模方案也可以满足生产效率和使用需求。今后,随着点云处理技术和三维建模技术的不断发展,各类物体结构线自动化采集是提高建模效率的一大问题,成功解决这一问题将会进一步提高三维建模的效率,基于点云建模技术也会得到更加广泛应用。