基于智能移载搬运机器人的自动化仓库调度优化研究
2023-02-21赫雪婷
赫雪婷,镇 璐
(上海大学 管理学院,上海 200444)
1 引言
为满足小批量、多品种、短配送周期和不断变化的工作量的需求,大量电商企业采用自动化仓库系统提升作业效率[1]。自动化仓库系统的应用提高了订单分拣效率,使电商仓库能够更好地提供高效、准时、个性化的物流服务,从而提升客户体验。
传统自动化分拣系统通常基于传送带分拣机实现包裹的分拣。对于此类系统的布局设计和系统操作,Boysen等[2]已经进行了深入研究。此类系统中传送带分拣格口分配问题也吸引了许多学者的关注。Zenker和Boysen[3]将分拣格口的目的地分配问题扩展为多个目的地可共享一个出库口的问题,提出了一种混合整数线性规划模型,并设计一种贪心局部搜索和禁忌搜索相结合的算法求解该问题。Hou等[4]对自动分拣系统中订单指派问题进行研究,以均衡分拣任务为目标建立数学模型,通过实例验证了模型的有效性。张贻弓和吴耀华[5]研究了并行自动分拣系统,确定品项分配优化目标从而建立一个聚类模型,并设计了一种启发式聚类算法求解该问题。Briskorn等[6]对闭环倾斜托盘分拣输送机展开研究,以最小化时间跨度为目标,提出一个短期确定性调度问题,并评估了不同分拣机布局的性能水平。
随着KIVA自动搬运机器人的应用,基于自动引导车(automated guided vehicle,AGV)的自动化分拣系统也广泛用于自动订单拣选[1,7]。国内外学者对依托AGV的分拣系统开展了丰富的研究。秦虎[8]为自动化仓库系统中AGV的优化调度以及仿真提供了有效建议。Saidi-Mehrabad等[9]提出了一种基于AGV系统的无冲突路由和作业车间调度的集成模型。Lee和Murray[10]以最小化运送物品到包装站的时间为目标,定义了一个新的路径规划问题,并研究了不同设备的组合以及仓库的布局设计对系统性能的影响。陈方宇等[11]为解决仓库拣选作业中因多拣货员同时工作造成的堵塞问题,设计了一种基于蚁群算法的拣选路线算法,以提高订单拣选效率。蔺一帅等[12]提出了货位和AGV路径协同优化数学模型,将货架优化和路径规划归为一个整体,并使用改进遗传算法对模型求解。余娜娜等[13]为实现AGV的无冲突路径规划,以最小化最大搬运完成时间为目标建立数学模型,并提出一种改进差分进化算法求解该问题。李浩霖等[14]考虑“一车双箱”存取模式,构建了穿梭车立体仓库中的订单分批决策与存取选择决策的集成优化数学模型,并应用变邻域算法解决该问题。
为了在有限的空间内高效地完成包裹的分拣任务,部分仓库设计了基于智能移载搬运机器人的自动化仓库系统(以下简称智能移载搬运系统)。如图1所示,智能移载搬运系统主要由传送带分拣机、分拣格口、笼车以及与AGV具有相似功能特征的智能移载搬运机器人(以下简称机器人)组成[15]。因此,此类系统的运作流程中将涉及两类设备(传送带分拣机和机器人)的决策问题。通过对现有文献进行归纳分析,现有研究主要集中在单一分拣设备(传送带分拣机或AGV)的调度上,以均衡传送带分拣机的订单量或最小化AGV的行驶路程为目标进行优化决策;较少有将传送带分拣机中分拣格口的分配以及AGV的运输路线综合考虑并进行调度优化的。因此,本文以智能移载搬运系统为研究对象,考虑该系统运作过程中传送带分拣机与机器人的联系,以最小化完成包裹分拣的时间为目标,构建了一个混合整数规划模型,同时对两种设备的运作进行决策优化。此外,不同于现有文献中常用的启发式求解算法,本文设计了一种精确式求解算法——基于路线模板法的分支定界算法高效求解本研究问题,并通过大量数值实验验证该算法的有效性与高效性。最后,通过敏感性分析实验,为智能移载搬运系统的运作提供一些决策建议。

图1 智能移载搬运机器人及作业场景
2 问题描述
本文的研究对象为基于智能移载搬运机器人的自动化仓库系统(如图2所示),该系统主要由传送带分拣机、分拣格口、智能移载搬运机器人以及笼车组成[15]。

图2 基于智能移载搬运机器人的自动化仓库系统
在智能移载搬运系统中,包裹根据其特征(如包裹的目的地信息等)经传送带分拣机运输至不同的分拣格口;随后,到达分拣格口的包裹将被搬运至智能移载搬运机器人上,智能移载搬运机器人在笼车与分拣格口之间的巷道中穿行,将搬运的包裹投递到不同的笼车中,完成包裹的分拣任务。在该过程中,不同设备之间彼此联系,以准确高效地完成每一件包裹的分拣任务。在上述分拣过程中,存在两个决策问题:(1)根据包裹的目的地信息,决策包裹与分拣格口的对应关系。(2)根据包裹对应的分拣格口信息以及对应的笼车信息,为机器人分配包裹并规划行驶路线。此外,为顺利完成分拣任务,本文提出如下假设:(1)预先知道包裹的目的地、对应的笼车等信息。该假设可通过扫描包裹上电子面单实现。(2)每个分拣格口仅处理同一目的地的包裹。该假设可将同一批次包裹根据目的地信息分配给不同的分拣格口,对包裹进行简单分类。(3)有足够的分拣格口能够满足所有目的地的需求。
3 模型构建
为了解决上述问题,本节提出一个混合整数规划模型。模型中使用的集合、参数以及决策变量定义如下。
集合与下标。S为包裹编号的集合,下标为s;为包裹编号集合S的子集为分拣格口标号的集合,下标为n;R为机器人编号的集合,下标为r;D为不同目的地的包裹编号的集合,下标为d;e,^e为机器人分拣路线的虚拟起始结点与虚拟终止结点。
参数。as,s′表示若包裹s与包裹s′的类型相同,并且包裹s′紧接包裹s进入传送带则为1,否则为0;bs为包裹s的目的地编号;gs为包裹s送入传送带的时间为从分拣格口n行驶至包裹s对应的笼车所需的时间;为包裹通过传送带送至分拣格口n所需的时间;t为分拣格口处搬运一件包裹所需的时间;M为一个极大的数。
决策变量。αn,d为0-1决策变量,若目的地d的包裹送往分拣格口n则为1,否则为0;βs,s′,r为0-1决策变量,若机器人r在运输包裹s后再运送包裹s′则为1,否则为0;γs,r为机器人r到达负责分拣包裹s的分拣格口的时间;δs,r为机器人r开始运输包裹s的时间;εs,r为0-1决策变量,若机器人r运输包裹s则为1,否则为0;ωr为机器人r完成本批次所有分拣任务的时间。
数学模型(F1)
目标函数(1)表示最小化处理完最后一件包裹的时间。约束(2)确保相同目的地的包裹只能送往同一个分拣格口。约束(3)确保一个分拣格口仅处理来自一个目的地的包裹。约束(4)确保任意一件包裹只被一辆机器人运输。约束(5)至(9)为机器人的运输路线约束。约束(10)和约束(11)表示若机器人r先后连续运输包裹s,s′,则机器人到达包裹s′对应分拣格口的时间应晚于机器人r完成包裹s运输后返回包裹s′对应的分拣格口的时间。约束(12)表示若包裹s,s′先后接连到达同一分拣格口,则机器人r′开始运输包裹s′的时间晚于机器人r开始运输包裹s的时间加上搬运每件包裹所需的时间。约束(13)和(14)表示包裹s到达分拣格口后,立刻被机器人运输。约束(15)和(16)表示决策变量γs,r,δs,r,εs,r之间的关系。约束(17)确保ωr为机器人r运送最后一件包裹的时间。约束(18)和(19)定义了决策变量的范围。
4 算法设计
本文所研究的智能移载搬运系统的资源调度问题,是一个由目的地指派问题与机器人路径规划问题构成的集成问题。在本文的数学模型中,约束(2)和(3)为目的地指派问题的相关约束,约束(4)至(16)为机器人路径规划问题的相关约束。
为了求解该问题,本节设计了一种基于路线模板法的分支定界算法,其中分支定界算法用于求解目的地指派问题,路线模板法通过求解机器人的所有可行运输路线作为路线模板,然后从路线模板中选择最优运输路线,从而求解机器人路径规划问题。在使用分支定界算法得到可行的目的地指派策略后,应用4.2节中生成路线模板的方法生成机器人的运输路线,并计算目标值,对指派策略的效果进行评价和更新。
4.1 分支定界
4.1.1 搜索树和分支策略
结合指派问题的特性,采取添加目的地的思想构造关于指派策略的搜索树。首先,根节点代表所有目的地的包裹均不被分拣的情况,每一层代表不同的目的地(其中i表示层数,di表示i层对应目的地);随后,从根节点开始逐层进行分支,当搜索到第i层的某个结点时,考虑下一目的地的|D|-i种指派策略,以此分支得到|D|-i个新的子节点。重复上述步骤,直至所有目的地均被分配为止,即层数i=|D|时结束分支。
假设|N|=|D|=3,完整的搜索树结构如图3所示。其中搜索树第i层的每一个节点均代表该层目的地di的指派策略,例如第1层的三个节点,分别表示目的地d1对应的分拣格口为n1、n2和n3。搜索树的构建方法如下:首先,设置根节点为空,即无目的地被指派,随后,在搜索树的第1层中,对d1分别考虑n1,n2,n3三种情况,并将根节点分为三个子节点d1-n1,d1-n2,d1-n3。同理,在第2层中,继续针对该层目的地考虑不同的分拣格口指派策略,并得到第2层的各节点d2-n2,d2-n3;d2-n1,d2-n3;d2-n1,d2-n2;以此类推,直至得到所有指派策略。
4.1.2 上界与下界
每个节点都存在一个下界LB,其值表示当前节点对应的指派策略下的目标值,即最小完成分拣时间。以图3中搜索树第1层结点d1-n1为例,该节点的下界表示仅将目的地d1指派给分拣格口n1时的目标值。结点d1-n1的子节点d2-n2的下界表示将目的地d1,d2分别指派给分拣格口n1,n2时的目标值。
定义UB为全局上界,表示已搜索过的可行指派策略中的最小完成分拣时间。通常,初始上界设为无穷大,为了加快求解速率,本文将对应包裹数较多的目的地优先分配给靠近传送带入口处的分拣格口作为初始指派策略,以生成初始UB。
4.1.3 算法框架
步骤1定义αn,d,Z(αn,d)分别表示当前节点的指派策略及其目标值分别表示最优可行指派策略及其目标值。根据4.1.2中的初始指派策略可以得到初始可行解初始化根节点为空节点,且其LB为0。定义节点集合为Ω←Ø。
步骤2 从根节点开始分支,得到子节点,并将所有子节点加入节点集合Ω。从节点集合Ω中选择一个节点作为根节点,并将该节点从Ω中移除。根据当前根节点的分配指派策略αn,d,求解机器人的最优运输路线,得到目标值Z(αn,d)。
步骤3(1)若Z(αn,d)<UB且约束(2)未满足时,跳转至步骤2;(2)若Z(αn,d)<UB且约束(2)被满足时,更新跳转至步骤4;(3)若Z(αn,d)≥UB,剪去该节点,跳转至步骤4。
步骤4若当前节点集合Ω为空,则算法结束;否则,从当前节点集合Ω中选择一个节点设置为当前父节点,并从Ω中删除该节点。跳转到步骤2。
4.2 路线模板法
本节在给定目的地指派策略的基础上,进一步求解机器人路径规划问题,即已知αn,d的值,求解模型中εs,r与βs,s′,r值。在某个确定的目的地指派策略下,可根据最后一件包裹到达分拣格口的时间求得目标函数值。为了求解机器人运输包裹的路线,本节提出两种路线模板生成方法及其对应的两个数学模型。
4.2.1 生成完整路线模板求解
在本节中,首先通过生成机器人运输包裹的所有完整可行路线作为路线模板;随后建立模型,令机器人在路线模板中选择可行路线,从而获得机器人的最优行驶路线。
1)完整路线模板的生成
为了求解所有可行的运输路线,定义以下新的参数与集合:us为包裹s到达对应分拣格口的时间,Fs为包裹s的可行后接包裹集合,即s1∈S}。Ps为包裹s的可行前接包裹集合,即
生成可行路线L的步骤如下:
步骤1选择S中us值最大的包裹s作为路线的当前节点,并添加到路线中。
步骤2 选择Ps中us值最大的包裹s′,更新路线终点s←s′,并添加到路线中。
步骤3重复步骤2直至Ps=Ø,得到一条完整可行路线。
使用上述方法可求得所有可行的运输路线,但会造成生成的路线数量过多,求解效率低下的问题。因此,在生成路线时,仅生成最长完整路线。最长完整路线是指满足如下条件的路线:①路线的起始包裹的Ps=Ø;②路线的终止包裹的Fs=Ø;例如路线k:s1→s2→s3→s4→s5,且Ps1=Ø,Fs5=Ø,而访问路线k中部分包裹的路线,如路线s1→s2→s3,s2→s3→s4将不再生成。
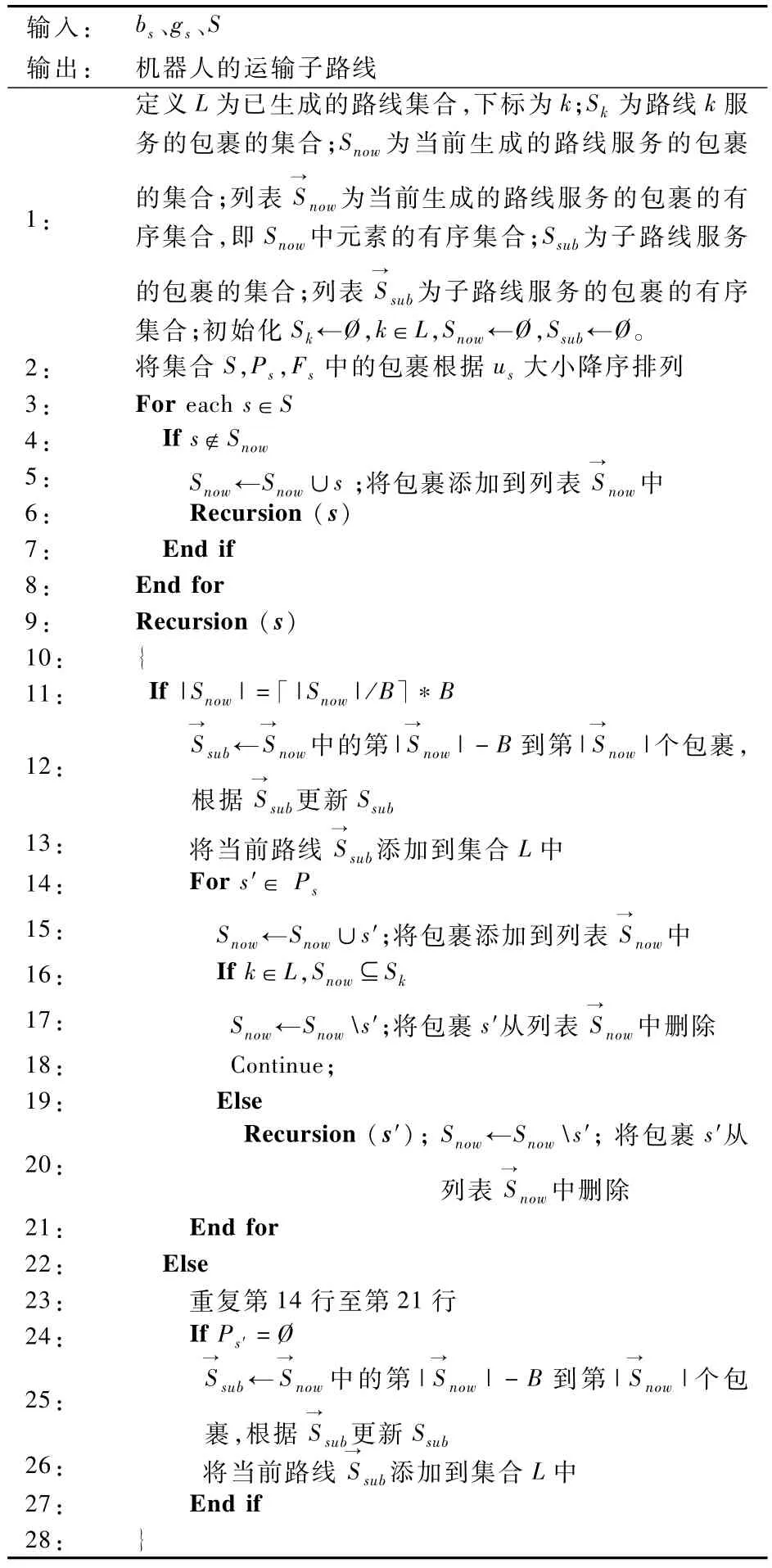
生成最长完整路线的算法框架如算法1所示。

算法1 完整路线模板生成
2)基于完整路线模板的模型(F2)
由于路线模板中的路线均为最长完整路线,若从完整路线模板中选择路线,则易出现同一包裹在多条路线中同时出现的情形。为解决此问题,本节首先将原模型的约束(4)松弛为约束∑r∈Rεs,r≥1,s∈S,根据得到的路线模板,构建路线决策模型,从路线模板中选择路线作为机器人的行驶路线。为构建基于路线的模型(F2),定义相关集合、参数、决策变量如下。
集合。K为路线编号的集合,下标为k。
参数。ck为路线k的费用,即该路线中处理完最后一件包裹的时间。xs,k,若路线k中访问包裹s,则为1,否则为0。
决策变量。θk为0-1决策变量,若路线k被选择为1,否则为0。
数学模型(F2)
目标函数(20)表示最小化处理完该批次中最后一件包裹的时间。约束(21)确保任意一件包裹均被运输。约束(22)确保被选择的路线数量不超过机器人数量。约束(23)确保ω为处理完最后一件包裹的时间。约束(24)设置了决策变量的范围。
定义集合K′为该模型的解,K′={k│θk=1,k∈K};路线k中包裹的集合为Sk;在该模型中,包裹允许被运输多次,因此需要对集合K′中的路线进行去重操作,以确保每件包裹仅被运输一次,从而获得原问题最优解。去重操作的步骤如下:
步骤1定义未运输的包裹集合为S0;未去重的路线集合为K0;初始化S0←S,K0←K′。从K0中选择一条路线k,S0←S0\Sk,K0←K0\k。
步骤2从K0中选出一条路线k,K0←K0\k;对Sk中的所有包裹s,进行下述操作:若s∉S0,则Sk←Sk\s;否则S0←S0\s。
步骤3若K0≠Ø,跳转至步骤2;否则,更新路线集K′中的路线,即对于路线k∈K′,路线k中仅保留集合Sk中包含的包裹。
需要指出的是,生成所有可行最长完整路线并运用F2求解,可确保求解结果为原问题的最优解。假设存在最长完整路线为k,定义所有访问路线k中部分包裹的路线集合为∈K}。由于路线k′∈中各包裹完成分拣的时间与路线k中相应的包裹完成分拣的时间相同,从路线k中删除部分包裹,即可得到任意路线k′∈,因此,生成最长完整路线作为路线模板,仍可确保求解结果为最优解。
4.2.2 生成子路线模板求解
应用4.2.1节方法,可选择|R|条路线得到路线可行解。随着包裹数量的增多,完整路线数量急剧增加,并且将导致模型F2的规模增大,难以在有效时间内求得可行路径解。因此,本节提出生成子路线模版的方式求解该问题。
1)子路线模板的生成
本节在生成路线时,用数条子路线代替最长完整路线;由于不同的子路线之间可以相互组合,形成不同的完整路线,因此相较于4.2.1节完整路线模板,运用子路线模板可以减少路线的数量,从而提高求解效率。例如,5条子路线:s1→s2→s3,s1→s6→s7,s4→s5,s8→s10,s9→s11可组合成如下6条最长完整路线:s1→s2→s3→s4→s5,s1→s2→s3→s8→s10,s1→s2→s3→s9→s11,s1→s6→s7→s4→s5,s1→s6→s7→s8→s10,s1→s6→s7→s9→s11。当包裹数量增多时,利用子路线方法,可以显著减少路线数量。此外,本节定义参数B表示子路线的最大长度。
子路线生成的算法框架如算法2所示。
算法2 子路线模板生成
2)基于子路线模板的模型(F3)
与构建模型F2时类似,本节仍先将约束(4)松弛,随后构建路线决策模型,从子路线模板中为每辆机器人选择若干条子路线,使其组合成一条完整路线,作为机器人的行驶路线。在运行算法2求得所有子路线后,为了优化子路线的组合方式,设置下述新集合,并提出基于子路线模板的模型(F3):
集合与下标。ok为路线k的起点,即ok={s|min{us,s∈Sk}};ek为路线k的终点,即ek={s|max{us,s∈Sk}};Ω+k为路线k的紧后路线集合,即行驶路线k后可行驶的路线集合,Ω+k={k′|ok′∈Fek,k′∈K};Ω-k为路线k的紧前路线集合,即行驶路线k前可行驶的路线集合,Ω-k={k′|ek′∈Pok,k′∈K}。
参数。ck为路线k的费用;xs,k,路线k运输包裹s时为1,否则为0。
决策变量。θk,r为0-1决策变量,若机器人r行驶路线k为1,否则为0;λk,k′,r为0-1决策变量,若机器人r行驶路线k后再行驶路线k′则为1,否则为0。
数学模型(F3)
目标函数(25)表示最小化处理完该批次中最后一件包裹的时间。约束(26)确保任意一件包裹均被运输。约束(27)确保机器人从虚拟起始路线出发,并回到虚拟终止路线。约束(28)表示对于某辆机器人而言,其行驶的子路线一定存在紧前紧后路线,且其紧前或紧后路线具有唯一性。约束(29)确保ω为处理完最后一件包裹的时间。约束(30)设置了决策变量的范围。
5 数值实验
为了验证第4节中所设计的算法的有效性以及高效性,本节进行了大量的数值实验。实验结果展示在表1和表2中。本文所用实验平台的CPU为Intel Xeon E5-2680 v4 CPU@2.40GHz,内存为256GB,采用Windows7 64位处理系统。代码在C#中实现,C#版本为Visual Studio 2019,CPLEX版本为12.6.1。
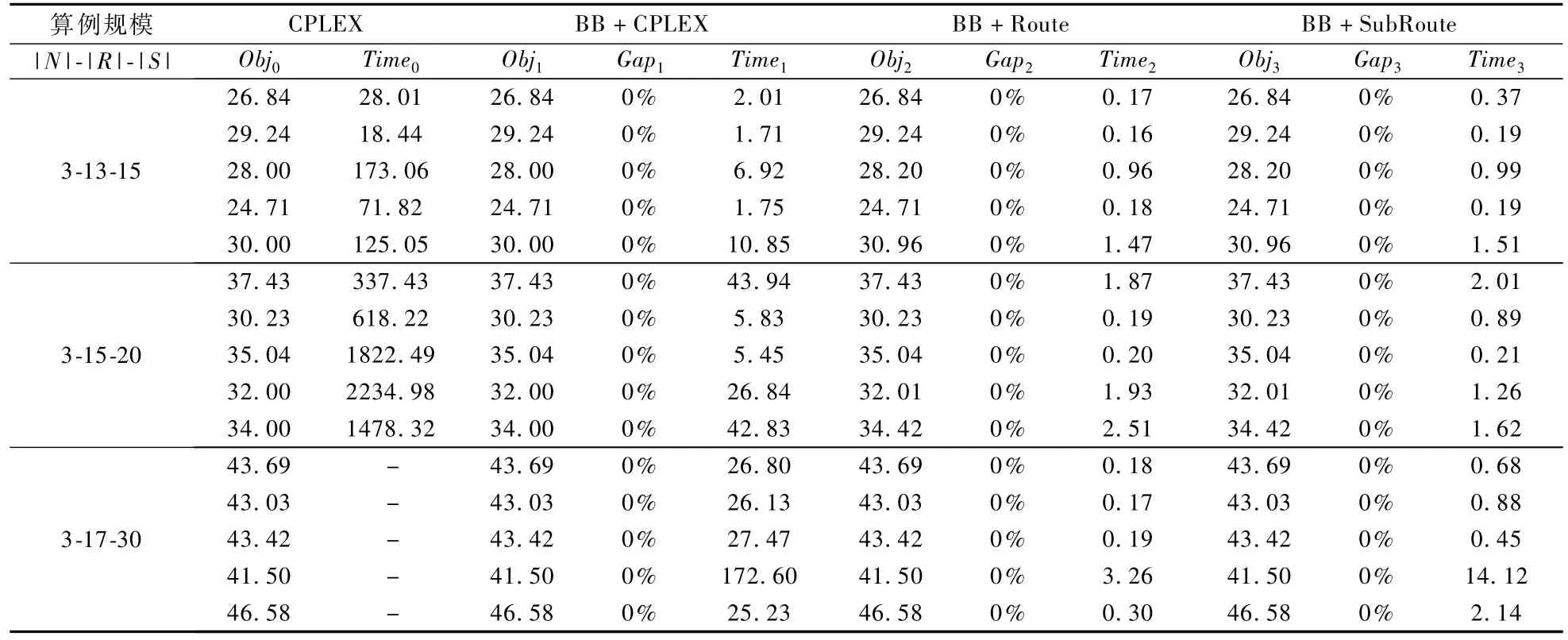
表1 小规模算例结果
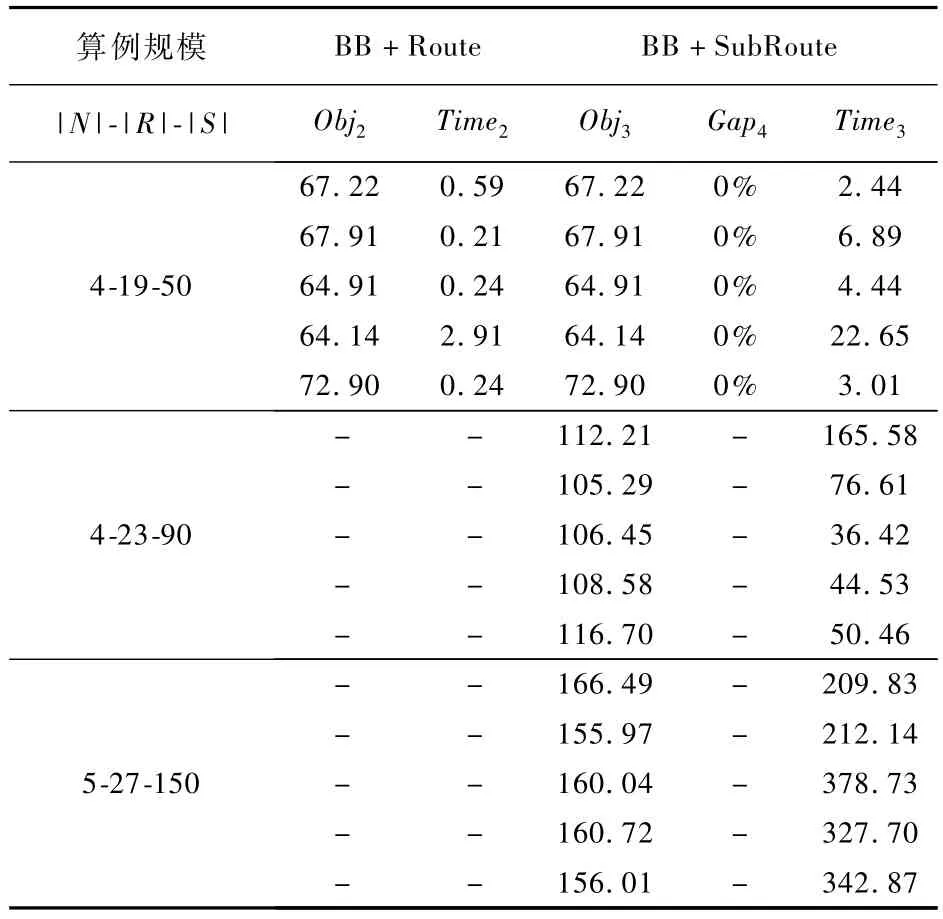
表2 大规模算例结果
5.1 算法测试
本节设计了大量实验对以下四种求解方法的效率进行对比:(1)使用CPLEX求解器求解F1。(2)使用分支定界算法求解目的地指派策略,将指派策略作为已知参数带入F1,使用CPLEX求解机器人的最优运输路线;可称作基于CPLEX的分支定界算法,以下简称为BB+CPLEX。(3)使用分支定界算法求解目的地指派策略,使用4.2.1节生成完整路线模板的方法求解机器人的运输路线;可称作基于完整路线模板法的分支定界算法,以下简称为BB+Route。(4)使用分支定界算法求解目的地指派策略,使用4.2.2节生成子路线模板的方法求解机器人的运输路线;可称作基于子路线模板法的分支定界算法,以下简称为BB+SubRoute。每种求解方式取得的目标值以及求解时间均被记录在表1中,并且为了避免偶然性,在每组算例规模下,本文进行了5次实验。此外,为保证算法可在适当时间内求得解,本文设定所有算法与CPLEX求解器的求解时间上限为7200秒。
从表1可以看出,在小规模算例中,BB+CPLEX、BB+Route、BB+SubRoute算法的求解结果与CPLEX的Gap均为0,且求解速度明显更快,这说明三种算法的求解效果均优于CPLEX求解器。此外,相较于其他算法,BB+Route算法表现最优,可在最短时间内求得与CPLEX相同的解,这说明求解小规模问题时,可运用BB+Route算法快速求解。而BB+SubRoute的求解时间略长于BB+Route,这是因为在小规模问题中,子路线模板中的路线数量并未明显少于完整路线模板中的数量,尚未发挥其优势。
为了进一步验证BB+SubRoute算法的有效性,本节设计了大规模实验并展示了求解效果,如表2所示。由于在大规模算例中,CPLEX 以及BB+CPLEX均无法在有效时间(7200秒)内求得解,因此未在表格中展示。表2对比了BB+Route与BB+SubRoute两种算法的求解结果。在较小的规模算例下(如算例规模4-19-50),BB+Route算法求解时间明显优于BB+SubRoute算法;随着算例规模的增大,BB+Route算法已无法在7200秒内求得最优解,而BB+SubRoute算法可在500秒内求得最优解,说明了BB+SubRoute算法在求解大规模算例时,比BB+Route算法更具优势。因此,在求解小规模问题时,可运用BB+Route算法进行求解;在求解大规模问题时,可运用BB+SubRoute算法进行求解。
5.2 敏感性分析
本文研究的基于智能移载搬运机器人的自动化仓库系统,由传送带分拣机、机器人和笼车组成。在前文中,构建了混合整数规划模型以决策系统中包裹的目的地分配以及机器人的运输路线,随后设计了算法以高效求解模型。事实上,系统中的其他资源,如传送带的运行速度、笼车的布局也会影响系统的性能。本节通过对传送带速度与笼车布局方式进行分析,进而为仓库经营者提供决策建议。
正常情况下,该分拣设备的传送带运行速度一般为2.7米/秒,并且该设备可根据具体情况对运行速度进行调整。对笼车来说,不当的布局将导致机器人在运输过程中的无用行程增加。本节将对比以下四种笼车的布局方式,研究笼车不同布局对分拣效率的影响。
①随机布局。不同目的地的包裹对应的笼车随机分布在笼车暂存区的各个位置,如图4(a)所示。
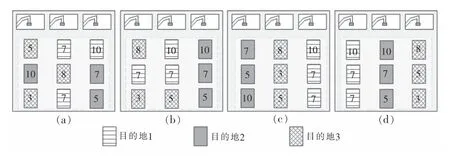
图4 笼车排列方式示意图(笼车上数字代表包裹数量)
②最短平均距离布局。笼车的位置由要分配的包裹数决定。将要装载更多包裹的笼车分配到与分拣格口平均距离较小的位置,如图4(b)所示。
③列式布局。将装载同一目的地包裹的一组笼车安排在同一列,如图4(c)所示。
④组合布局。基于列式排列布局,将装载更多包裹的笼车列分配到与拣选站较近的位置,对于同一列的笼车,将要装载更多包裹的笼车分配到离分拣格口较近的位置,如图4(d)所示。
为了对比不同传送带速度下、不同笼车布局下的总分拣时间的差异,本节对传送带速度与笼车布局的不同的组合方式,均进行5次实验,取总分拣时间的平均值作为纵坐标,其结果如图5所示。可以看出,传送带速度对包裹的总分拣时间的影响比较微弱,恰当的布局方式会明显缩短包裹的总分拣时间;在四种不同的布局中,随机布局的总分拣时间最长,性能最差,这是因为在随机布局中往往会存在一些不当布局;相较于随机布局,其他三种布局方式均可缩短总分拣时间,其中列式布局与组合布局两者的总分拣时间相差不大,均明显短于随机布局和最短平均距离布局。
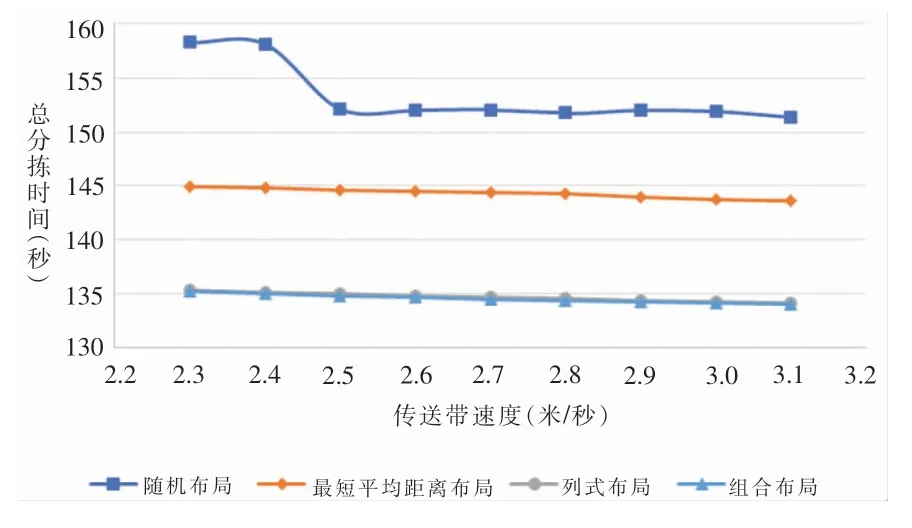
图5 传送带速度对总分拣时间的影响
在分拣过程中,总分拣时间可分为机器人总行驶时间以及机器人等待时间,机器人行驶时会产生行驶成本。为了对比不同包裹数量下、不同笼车布局方式对机器人总行驶时间的影响,对于每组情形,同样进行5次实验,取总分拣时间的平均值作为纵坐标值,结果如图6所示。可以看出当包裹数量一定时,组合布局中,机器人的总行驶时间小于其他布局方式,且随着包裹数量的增大,组合布局的优势也愈发明显。从上述结果可以看出,仓库经营者在部署仓库的笼车资源时,可选择组合布局提高仓库运作效率。
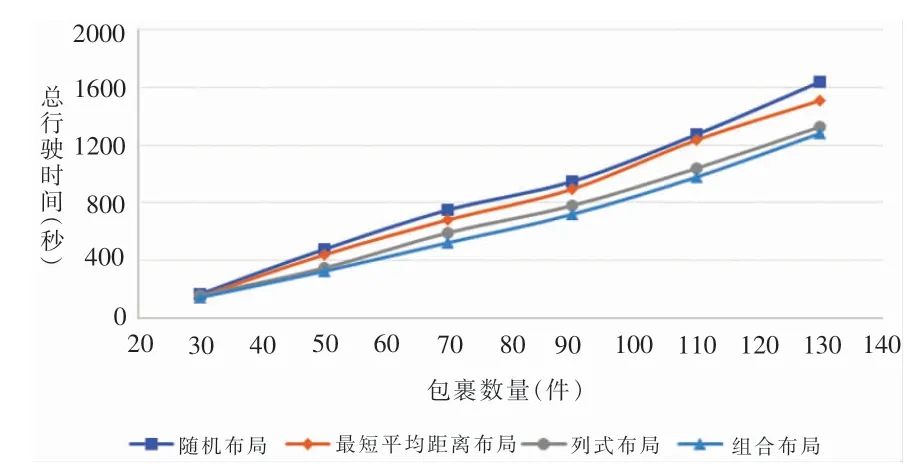
图6 包裹数量对总行驶时间的影响
6 结论与启示
本文以基于智能移载搬运机器人的自动化仓库系统为背景,研究了该系统中包裹目的地指派与机器人路径规划的集成优化调度问题。为解决此问题,本文建立了一个以最小化完成分拣时间为目标的混合整数规划模型,并设计精确式求解算法求解该模型。大量实验验证了本文提出的模型与算法的有效性与高效性。此外,本文还对智能移载搬运系统中的相关资源进行了敏感度分析。本文的贡献总结如下:
(1)智能移载搬运系统主要由传送带分拣机与智能移载搬运机器人组成,为实现系统中这两种分拣设备的协同运作,本文提出了一个混合整数线性规划模型,以实现目的地指派与智能移载搬运机器人路径规划问题的集成优化。
(2)为了高效求解上述建立的模型,本文设计了精确式求解算法——基于路线模板法的分支定界算法,并且大量的数值实验验证了算法的高效性,并得到如下结论:在小规模情况下,两种基于路线模板的分支定界算法可在极短时间内求得问题的最优。在大规模情况下,基于子路线模板法的分支定界算法的求解效率更高。
(3)为了探究智能移载搬运系统中其他资源对系统性能的影响,本文对仓库中笼车的布局方式以及传送带的运行速度进行了敏感度分析实验,并给出管理启示,为仓库的布局方式以及传送带的运行提供了决策依据,有助于提升仓库的运作效率。
