面向马赛克战的通感算融合网络架构与模型设计*
2023-02-02张国华姜永广邓伟华
张国华,文 军,武 明,姜永广,吴 贤,邓伟华
(中国电子科技集团公司第三十研究所,四川 成都 610041)
0 引言
近年来,随着全域作战、多域作战、马赛克战等作战新概念逐步深入,“网络中心、信息主导”思想已成为各新概念作战理论真正实现的重要支撑。但是,由于长期受限于传统人工智能算法的先进性和计算机算力,国内战术通信系统的体系架构长期以感知、通信和存储、计算相互独立的设计为主。在新的作战概念不断发展的背景下,传统的以平台为中心的战术通信系统体系架构设计方法的通、感、算相互分离的设计思路已经难以构建支撑作战指挥的泛在通联、超大容量、超高算力的通信网络来实现新模式作战,难以对作战环境进行感知、对战场数据进行认知,难以获得抢占军事竞争制高点的优势,很难在对抗强敌作战中快速克敌制胜。
随着5G、物联网、软件无线电、云计算、边缘计算、区块链等技术在战场网络的应用,通信系统的载波频率逐渐提高、带宽逐渐增加、算力逐渐增强。趋于接近的通信和感知网络的频率、带宽,网络资源、计算资源分布式部署和服务化的应用,以及以深度学习、强化学习、分布式学习等为代表的人工智能技术的兴起,在智能感知、通信优化、计算共享协同等应用领域产生了广泛而深刻的影响,大大推动了具有高度分布特征的马赛克战的通信—感知—计算领域一体化融合设计的可能。同时,算力网络、东数西算、数据中心等相关超大工程和人工智能、自动驾驶等相关超级应用不断深入推进,我国已进入以云计算、大数据、人工智能技术为特征的后信息化时代,其中,作为人工智能核心要素的算力、算法和数据技术也实现了突破性进展。基于以上技术成果,将战术通信系统体系架构重塑,以实现通信网络的高智能化,来支撑强敌作战条件下的作战指挥信息系统建设,是打破与竞争对手之间非对称作战能力局面甚至实现赶超的重要环节,应该引起足够重视并需尽快付诸研究实施。
面向超级强国竞争,了解对手、分析对手、模仿对手、超越对手是竞争研究的基本模式,能够以更快的速度、更小的成本、更少的弯路快速集优实现能力提升。因此,面向强敌,针对作战提出的新概念、新战法、新模式,要尽量研究其内涵、特点、模型及开展的项目和技术突破情况,以期从中得到经验和启发,帮助实现我对等系统设计。近年来,国内学者针对美军提出的马赛克战概念理论开展了大量的研究工作。郭行等人[1]研究了美军马赛克作战的概念、效能、关键技术和对我军的启示;潘琦等人[2]研究了美军马赛克作战的概念、OODA 环作战结构、现状问题、关键技术和相关研究课题;付翔等人[3]研究了马赛克战机理、特点和多域智能技术在马赛克战通信组网、信息共享、自适应规划、动态管理、智能平台的应用;冯杰鸿[4]研究了面向马赛克战的军事体系智能化发展趋势、规律和需要重点关注的核心技术。但上述相关研究主要侧重于概念理论、探索性技术假设和效能预想评估的研究,系统性研究体系架构和模型设计的文献较少。
本文提出了马赛克战的交战模型,研究了基于感知、通信、存储、计算一体化融合的网络体系架构和设计模型,展示了环境感知、通信互联和高效计算为一体的战术领域通信网络架构和物化模型。
1 马赛克战综述
1.1 马赛克战的概念
2017 年,美国国防预先研究计划局(Defense Advanced Research Projects Agency,DARPA)下属战略技术办公室(Strategic Technology Office,STO)首次提出马赛克战概念,初步构想将传感、网络、指控、武器/平台等要素碎片化形成“马赛克块”并通过“马赛克拼图”方式进行快速能力拼装,形成作战体系杀伤链,实现弹性、重组和自适应的强大作战能力[5-6],并初步定义了马赛克战的作战力量组合方式机理。2019 年3 月、9 月,DARPA 通过公告和研究报告进一步明晰马赛克战的高动态性、高自主性、高协同性,以适应动态复杂的作战环境,同时,通过自身分解和柔性重组,加重敌方认知负担,从而提升不对称作战优势。其目标是通过将杀伤链的发现、确认、跟踪、瞄准、交战、评估(F2T2EA)功能分布在作战区域所有有人和无人平台上,并通过效果网将这些能力单元快速重组和连接,形成快速灵活重组、可扩展、自适应的联合多域杀伤能力。
1.2 马赛克战的特点
1.2.1 面向实战,弹性抗毁
马赛克战强调适应实战中“反介入/区域拒止”条件作战环境的能力。“反介入/区域拒止”条件下,地方干扰作战体系的通信链路,造成通信连通和信息交互受阻,无法形成各资源共享交互。在马赛克作战模式中,从作战体系结构出发,将感知、计算和通信进行互惠增强,形成区域认知能力,并通过人工智能技术辅助判断、决策和调整,形成具有通信泛在自适应互联、作战要素自适应动态重组、信息去中心化分布式按需协同共享的弹性、韧性抗毁作战体系。
1.2.2 高度分散,跨域协同
马赛克作战是全域作战、多域作战、联合作战等作战概念的进一步升级,主要是基于多样化作战任务,在广阔战场环境下各部(分)队在高度分散的作战地域实施的作战。分布式和跨域协同是马赛克作战的最主要特征。协同包括3 部分的内容:一是大区域高度分散的部(分)队之间信息共享、时空统一;二是小区域内系统各平台之间信息畅联、行动协调;三是单平台上的多个功能单元之间有机组合、动态装配、智能通联。通过各域的协同一致,提升马赛克战协同探测、协同决策、协同指挥、协同攻击、协同防御等作战环路闭环和体系作战能力,从而取得战争博弈优势。
1.2.3 模块组合,动态灵活
传统的作战系统与平台注重本身的多能性,但不注重灵活性,一般通过功能叠加集成为复杂的综合系统,导致使用、维修、维护和升级均要付出较大的成本代价。马赛克战概念的拼图式功能组合思路弱化了系统和平台基本功能单元的耦合度,将复杂作战平台功能以马赛克块进行功能解耦。通过功能单元解耦和模块化组合设计,降低了装备全生命周期内的研制、生产、使用、维修、升级等经济和时间成本,并通过按需动态的拼图式功能快速组合,提升系统和平台的按需资源调度能力,提高战时作战效率和效能。
1.2.4 体系赋能,多链杀伤
联合多域杀伤力是DARPA 对马赛克战的目标之一。将杀伤链的发现、确认、跟踪、瞄准、交战、评估(F2T2EA)功能要素分别部署在作战域各有人/无人平台,并通过信息系统网络将这些功能进行快速重组与连接,提供快速、可扩展、自适应重组能力的杀伤力[7]。马赛克战将作战体系中的传感器、传输网络、指挥决策、行动控制、交战武器及有人/无人平台以单元模块实体方式集成,形成分布协同、动态组合、弹性抗毁的作战效果网。较传统的“单一杀伤链”和演进发展的“系统之系统”“杀伤网”,马赛克战形成的是“自适应杀伤网”,具有更强的作战杀伤鲁棒性。
1.3 马赛克战技术项目与发展方向
从马赛克战概念被提出开始,DARPA 就围绕马赛克战达成的作战能力目标,在体系架构、指挥控制、通信组网、武器/平台及基础技术方面开展了相关项目布局与研究,旨在提升体系柔性重组能力和各种作战资源的共享能力,并增强互联、互通、互操作性。其中,在体系架构相关技术领域布局并相继开展了“系统之系统集成技术与试验(SoSITE)”(2014 年4 月)、“自适应跨域杀伤网(ACK)”(2018 年7 月)、“任务集成网络控制(MINC)”(2021 年4 月),旨在解决如何快速集成异构系统,打破传统局域、静态、刚性的封闭架构,构建全域、弹性、网状的开放架构;在指挥控制方面布局并相继开展了“空战演进(ACE)”(2019 年6 月)、“支持快速战术执行的空域全面感知(ASTARTE)”(2020年4 月)、“用于弹性计划、战术与试验的战略混沌引擎(SCEPTER)”(2022 年1 月),旨在运用人工智能技术突破人机系统难题,实现人的指挥与机器相辅助,提升作战管理效率;通信组网相关技术领域布局并相继开展了“九头蛇(Hydra)”(2014年)、“对抗环境下的通信(C2E)”(2014 年)、“任务优化动态网络自适应(DyNAMO)”(2015年10月)、“保护前线通信(PFC)”(2017 年11 月)、“海洋交战即时信息(TIMEly)”(2019 年6 月)、“基于信息的多元马赛克(IBM2)”(2019 年6 月)、“弹性组网分布式马赛克通信(RN-DMC)”(2020年6 月)、“天基自适应通信节点(Space-BACN)”(2021 年9 月)等项目,旨在建立跨域、实时通信网络,提供即时、高效信息保障;在武器/平台相关领域布局并相继开展了“小精灵(Gremlins)”(2015 年9 月)、“黑杰克(Blackjack)”(2018 年4 月)、“魔鬼鱼(Manta-Ray)”(2019 年6 月)、“垂钓者(Angler)”(2019 年11 月)、“远射(LongShot)”(2021 年2 月)项目,旨在将武器/平台功能分解、要素最小化,并开发无人自主、功能解耦装备单元,实现系统功能的“化整为零”;在基础技术相关技术领域布局并相继开展了“竞争环境目标识别与适应(TRACE)”(2014年12月)、“灵活编队(A-team)”(2016 年12 月)、“远征城市场景弹性作战试验台(PROTEUS)”(2017年6月)、“地理空间云分析(GCA)”(2017 年10 月)、“系统之系统增强小型作战单元(SESU)”(2019 年3月)项目,旨在解决战场智能、快速信息处理、多模式态势感知、高效建模仿真、超敏目标时敏等基础性问题[8-9]。马赛克战技术项目的布局如图1 所示。

图1 DARPA 马赛克战技术项目布局
从DARPA 布局发展的马赛克战项目来看,相关技术的发展方向主要体现在以下几个方面:
(1)作战资源与作战任务动态适配。通过快速拼接构建复杂杀伤网作战体系是马赛克战的核心内涵。将战场的各种传感器、通信网、指控系统、武器平台等碎片化作战资源按照马赛克拼图快速拼装,形成高度弹性和韧性的自适应杀伤网。ACK、DyNAMO 等技术项目主要实现资源与任务动态自适应的研究课题。
(2)战场环境认知化和网络动态化。战场环境认知和网络动态自适应调整是认知对手、限制对手、打赢战争的根本保证。DARPA 开展ASTARTE、C2E 等技术项目研究,旨在破解战场认知环境下的弹性自适应网络。
(3)信息交互和行动控制的跨域协同与自主。DARPA 通过开展RN-DMC、Space-BACN、MINC等技术项目,研究高度分布的马赛克战如何实现跨域通信覆盖和信息交互,并实现分布在不同作战地域作战力量之间的高效协同和行动一致。
(4)平台向无人化自主协同方向发展。无人化和智能化是现代战争减少战斗减员的重要途径。DARPA 开展的Gremlins、Blackjack、Manta-Ray、Angler、LongShot 等项目主要面向有无人作战协同,旨在将无人化武器/平台进行功能解耦和智能化开发,实现无人平台之间的自主协同,形成侦察、判断和打击能力。
(5)任务判断与决策智能化。判断与决策是实现OODA 战斗过程闭环的关键环节。SCEPTER等项目主要通过人工智能辅助,实现有人无人协同作战过程的目标解算判断和指挥决策控制,提升作战杀伤网效率。
1.4 马赛克战交战模型
马赛克战推动了传统作战平台节点的变革,传统的作战平台要么是功能庞大复杂的复合节点,要么是功能单一的专业节点,而马赛克战的平台节点功能可以按需重组为一个体量适中的功能节点。一种基于作战平台节点和信息关系构建的马赛克作战概念结构与交互模型如图2 所示。

图2 马赛克战概念体系结构模型
图中的结构模型是用节点和连线组成的系统,可以看作是由点集Ver和边集Edg组成的二元组Group=(Ver,Edg)。其中,节点Ver可以是作战区域内的侦察、指挥、信息、情报、通信和武器平台节点,边集Edg可以是与作战指挥相关的情报、指挥、控制等关系,但不仅是指信息关系。比如,一个情报关系的Edg可以是获取方也可以是接收方,表示了Edg是否有向;也可以用来表示信息的重要和缓急程度,表示了Edg所处权重。马赛克战结构模型是所有点集Ver={ver1,ver2,…,vern}和所有边集Edg={edg1,edg2,…,edgm}的二元组集合,n表示系统侦察、指挥、通信、火力等实体节点的总数,m表示实体节点之间情报、指挥、控制等关系的总数。
对于马赛克战而言,参战兵种多、兵力分散、协同交互程度高、作战多能灵活、作战节奏快,需要构建更为精干灵活的网络体系结构来实现作战体系的快速灵活重组,以适应复杂作战场景。在信息域范畴,一个典型的马赛克战模型是以平台P 为搭载平台,集成信息获取实体(O)、信息传输实体(C)、指挥控制实体(D)、交战火力实体(F)等实体,承载情报(in)、指挥(ca)、控制(co)、状态(st)等信息的实体模型。在任务域范畴,一个典型的马赛克作战任务链模型是信息获取实体(O)收集战场环境情报信息(in),通过信息传输实体(C)通告指挥控制实体(D)进行数据融合、分析、处理,并筹划和制定决策,将进行行动的指挥信息(ca)传递给交战火力实体(F),从而完成对敌目标的行动,并在行动过程中根据需要将状态信息(st)在各实体进行传递交互,而控制信息(co)主要用于任务系统与搭载平台的信息交互。
一个包含Pi,Pj,Pp,Pq节点的马赛克战交互模型中,所有节点均集成有O、D、F、C 实体,所有O、D、F 实体之间均能通过C 实现in、ca、co、st 信息的传输与共享,并形成Oi→Di→Fi的同P任务链或Oj→Di→Fp的异P任务链。按照网络规模,任务链路的条数为(n为系统节点数),与传统概念的n条任务链相比,该交互模型大大提高了任务链的敏捷性和适应性。包含Pi,Pj,Pp,Pq的4 节点马赛克战交互模型如图3所示。
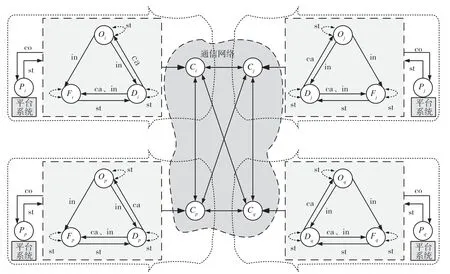
图3 4 节点马赛克战交互模型
1.5 马赛克战效果网能力需求
马赛克战是一种体系智能化、自主化、高效率作战概念形式,对效果网低时延、高可靠、大带宽通信效能的要求越来越高,对抗毁、抗干扰、随遇接入的不间断通信需求也越发严苛,因此需要以深度学习、人工智能作为技术实现的重要支撑。
从图2 的马赛克战体系结构与交互模型来看,需要通过通信系统将作战区域各实体实现信息铰链,其边Edg主要是通联性、业务承载、带宽、时延,以及自组织、自适应的有向关系度量。马赛克战效果网要实现相关度量和自适应调整,主要通过以系统算力为基础的资源池、以行动为框架的模型库、以数据统一为核心的算法集3 个方面实现网络的最优化动态自适应,需要智能调度传输、组网、控制、计算相关的各种资源,并在内部构建畅通联系和协调调度通路。马赛克战效果网能力需求主要包括架构柔性重组能力、环境认知能力、网络和计算资源智能协同调度能力、专家经验辅助动态管控能力。架构柔性重组能力需求方面,需要通过开放式架构的柔性设计和重组基因植入,将战场区域内的分散单元动态协同组合,实现效果网的动态灵活性、环境适应性和弹性、韧性,支撑作战OODA环[10]。环境认知能力需求方面,需要通过电磁环境主动感知和被动探测明确可用频谱资源,并采用动态频谱接入技术,实现有效躲避战时环境干扰,提高可靠通信和频谱利用效率。网络、计算资源聚合和智能协同调度能力需求方面,需要通过网络和计算资源的联网上云,将分散在战场区域的网络和计算资源统一虚拟化和数字化,形成紧密系统的可统一调度资源池,基于资源高效获取、互联共享和按需调度,实现资源协同调度的最优解。专家经验辅助和动态管控能力方面,主要通过数据挖掘、专家知识库构建,以及规范化、标准化、服务化表征和封装统一数字化处理和协议格式,构建准实时的战场关联数据交互和调度资源池,实现有限资源的优化分配、高效调度、按需调控和高效利用,支撑对网络和计算资源的高效调度和智能控制。
2 通感算融合网络体系架构设计
在战场通信环境领域,感知是实现战场网络畅联和信息融合处理的必要前提,通常是通过感知、探测战场电磁波和频谱信号获得对环境信息属性和状态的无线信号感知探索和频率有效利用,完成检测、识别和通信传输参数重配置;通信是战场环境端到端信息传输的基本功能,通常通过战场信息系统部署的有线无线结合、远距近距结合、宽带窄带结合、空天陆海结合等传输媒介和特性传输实现战场通联手段及组网与控制相结合的通信网络;计算是实现战场环境端到端信息处理的关键环节,通常是指基于战场分布式通用软硬件平台、数据库和数据结构实现特定任务和特定行为的计算行为。基于效果网能力需求,设计通感算一体融合的战场战术网络体系架构可以实现感知能力、通信能力、计算能力的内生融合和互惠互增,既可以解决战场环境中大数量通信和感知单元日益增长的业务和传输需求与算力资源有限之间的矛盾问题,又可以将环境感知、信息传输、信息共享、数据处理、指令控制形成信息流环路在统一平台形成闭环。
2.1 通感算一体化网络架构
战术通信系统通感算一体化的核心设计理念是在战术环境中构建泛在覆盖的通信能力、多维融合的感知能力和分布式协同的智能计算的网络,实现3 个独立的能力在同一系统融合设计,且互惠互利。战术通信网络内的各网元功能单元采用通信、感知、计算软硬件资源的共享与协同,实现环境频谱数据多方位感知、战场通信节点之间的多节点协作通信和分布式算力基础设施之间的智能系统计算,达成通感算功能的深度融合和互惠增强,从而使战术通信网络具备将环境、通信、信息、存储、计算等资源分布智能协作和信息流闭环协调智能交互的能力,有效支撑战场环境下频谱环境迅速感知与重构、智能辅助通信调度、算力资源共享与智能调配,极大提升战场环境用户的网络服务质量和用户体验质量。
一种以“网—云、边、端”为整体架构的新型通感算一体网络架构如图4 所示。该网络架构在战场要素布局高度分布式情境下,基于泛在互联的卫星、散射、微波、电台等手段构建空天地一体网络深度融合组网,将战场环境下的机动云、边缘计算服务器、通感算一体化终端及固定环境下的区域服务云等战场感知、计算资源和固定增强计算资源高效互联,有效实现战场多维感知器的协同融合和广泛分布算力资源的云边共享、边端协同、聚合服务、智能调度与分配,将感知、通信、计算深度交叉融合并互惠增强,高效支撑战场信息和数据智能系统融合连接,满足高度分散马赛克战模式下的通感算一体的感知、通信、算力等多维资源系统一体应用和用户体验需求。

图4 通感算一体化网络体系架构
2.2 通感算一体化网络技术体系
感知、通信、计算、存储在通感算一体化网络架构设计实现,需基于传感器、收发信机、雷达、通信控制、计算服务等物理层单元实体,将感知、通信、计算域的资源和服务深度融合,形成互惠增强网络整体,支撑态势感知、指挥决策、行动控制、综合保障等作战应用。其中,感知获取丰富环境数据、业务流量特征和网络可用资源,可以为通信频谱接入和资源调度提供信息支撑,并通过融合共享的分布式算力和数据融合处理为通信算法提供全局策略和就近计算、高效调控;通信可有效传递和汇聚环境感知信息,扩展感知域认知深度,通过共享的融合算力支撑分布式感知数据特征描述、语义一致转换,并通过行动模型和算法库将感知后行为预置,提供辅助决策;感知和通信能够将战场分布式算力信息在计算网络中快速传递和同步,增强算力网络整体调度和实时分配能力。通信、感知、计算各域之间互惠增强设计实现,需要相关的技术群进行支撑,感算增强通信的技术群主要包括感知支撑通信获取战场环境数据先验数据、分布式边缘计算支撑通信信道探测预估和通信通知、云端架构支撑多维数据融合处理和大数据分析通信优选等技术群;通算增强感知的技术群主要包括分布式计算支撑感知数据融合处理与语义转换、通信支撑多节点感知和信息传递汇聚等技术群;通感增强计算的技术群主要包括感知数据获取支撑分布式算力调度、通信能力支撑分布式计算算力协同交互等技术群。通感算一体技术体系如图5 所示。
3 通感算融合模型设计
3.1 通感算融合一体化模型
通信系统与感知系统之间存在两个方面的特别相似性和关联性,催生两个系统的一体化设计。一是在物理功能单元和信号流程方面,通信系统与感知系统在射频收发信机、基带信号处理等存在相近或相似的特性;二是在电磁频谱利用和通信传输控制等方面,通信系统与感知系统在频率探测、频率监视、信号模糊处理、电子功率压制等存在关联性。通信系统与计算系统之间,在“一切皆资源”的理念推动下,将通信系统、计算系统的网络资源、算力资源进行耦合调剂、整体分配,已经成为军事应用方面的成熟课题,也决定了两者的强耦合关联关系。感知与计算之间需要战场分布的算力资源构建环境认知引擎,对频谱感知、同类设备发现感知、干扰检测感知进行融合和计算、处理,辅助实现多维感知、网络发现、信道协作探测、快速频谱接入功能。
通感算融合一体化设计策略是通过共享硬件、频谱、算力,构建优化、协调、共享的一体化互惠互助整体。通感算融合一体化设计模型如图6 所示。基于同一软件、硬件平台,在感知域,通过物理层频谱感知、干扰检测、节点发现和目标识别实现环境信息的探测和发现,将链路层信息数据传输到算力域模型库和算法集进行感知数据计算和决策,并在链路层与通信域实现信息传递和策略交互,通过协同探测与感知控制、频谱接入、频谱推理、频谱分配、频率维护实现感知环境和通信环境的协调一致;在通信域,基于感知域环境信息快速调整波形和链路层组网控制策略,并基于算力网络实现组网路由、拓扑管理、服务质量(Quality of Service,Qos)等通信组网和服务计算,提供战场环境下的优化通信传输;在计算域,基于分布式共享存储和计算平台,在算力网络层实现算力网络的路由寻址、状态监控、调度控制等算力资源共享功能,并在算力服务层提供算力资源统一编排、调度和算法实现,为通信域和感知域提供统一协同共享的高可靠性、短响应时间的算力服务支撑。
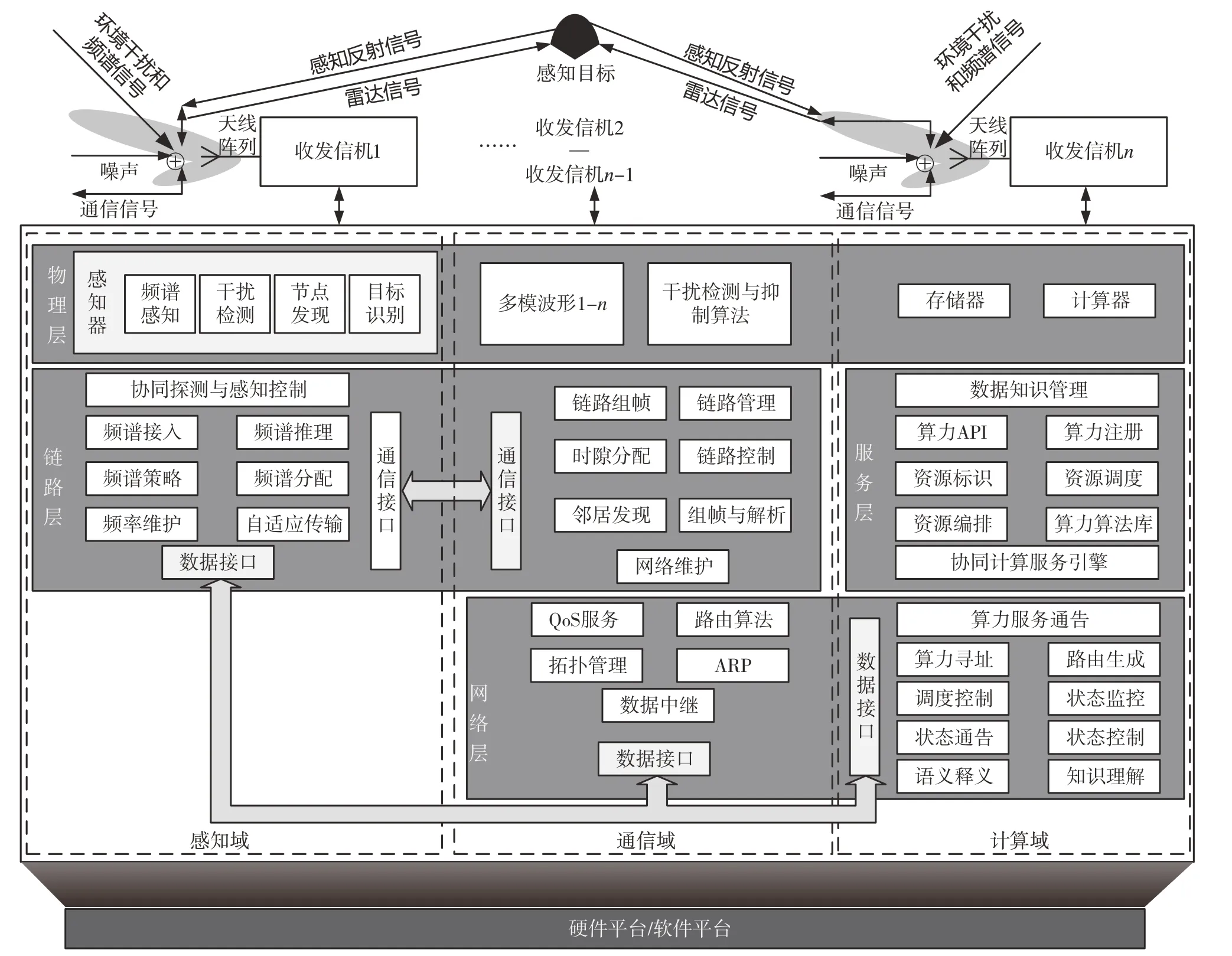
图6 通感算融合一体化设计模型
3.1.1 通感一体收发信机模型
通感算融合模型的收发信机模型是通过感知外接环境并自适应调整波形通信的模型,基于频谱感知器的感知信息、链路质量、通信距离等通信参数信息输入,通过策略推理形成最佳用频等选择控制方案,并与用频政策约束共同驱动,确定通信传输波形的决策方案,在波形资源库中选择合适的传输波形进行传输。通感一体收发信机模型如图7 所示。
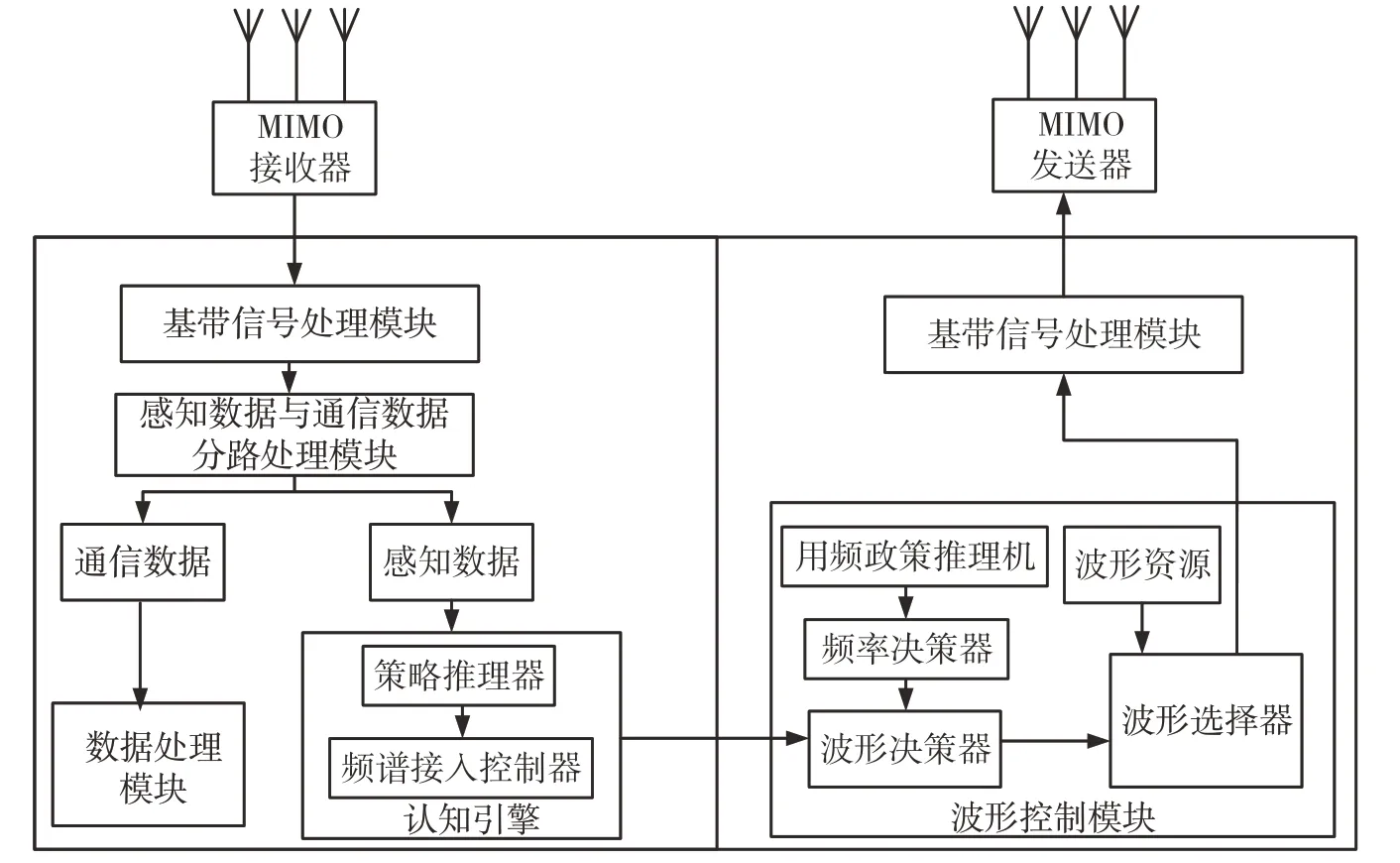
图7 通感一体收发信机模型
3.1.2 通感一体帧结构模型
无线通信系统的空口帧结构主要是指波形,当前通信系统中连续波体制波形占据主导地位,以正交频分复用波形(Orthogonal Frequency Division Multiplexing,OFDM)为典型代表,主要包括信道带宽、子载波数、子载波间隔、调制方式、编码方式、同步序列码、扩频码等主要参数。而通感一体帧结构设计是通感算一体化信息处理技术实现的关键内容之一,需要综合考虑频段带宽、通信能力和感知需求等要素进行帧结构设计,有利于实现大带宽、低时延传输和时敏捷变频率分配等通信内生感知能力。以战术电台5 MHz 带宽、1 ms 伪帧基本单元为例,通感一体伪帧结构模型如图8 所示。
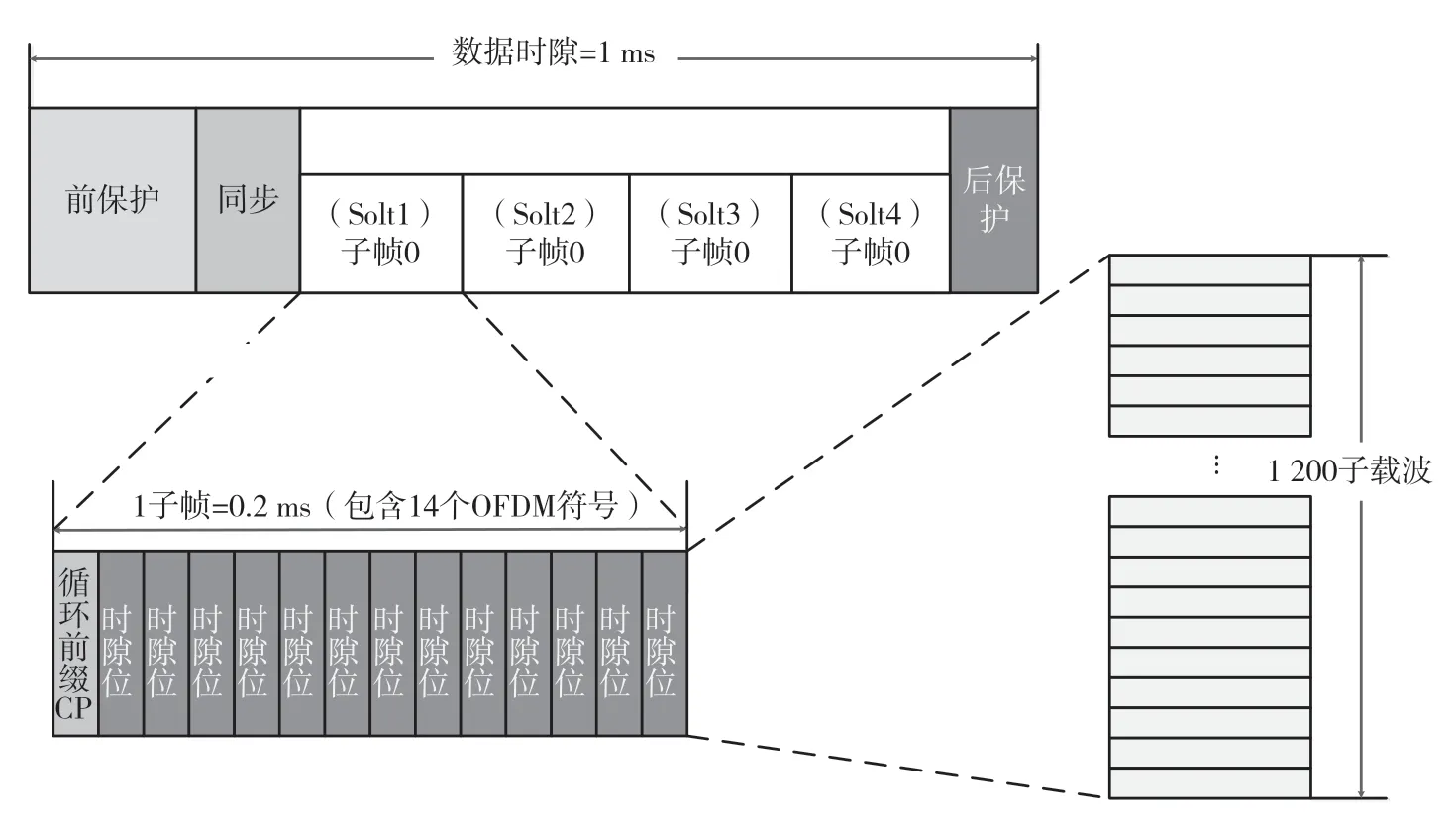
图8 通感一体化伪帧结构模型
1 ms 帧结构包含前后保护、同步头和4 个子帧,每个子帧帧长0.2 ms,包含了由1 个循环前缀CP 和13 个时隙位的OFDM 符号,每个时隙位在频率域上承载1 200 路子载波。该帧结构可以根据通信和感知的需求将时隙位自定义为通信信息和感知信息承载,实现对通信与感知所需的时频资源高效利用。
3.1.3 算力一体模型
随着马赛克战多方协同业务需求的增长,计算能力从少数数据中心向网络边缘和终端设备扩散。算力一体化模型包括体系算力的一体化和通感算设备本身的一体化,通感算设备本身的一体化主要是基于一体化物理硬件实现通感算业务的一体化算力融合。本文主要描述体系算力的一体化。体系算力具有典型的处理分布、数据分布、功能分布的分布式特征,并需通过算力应用的融合实现战场网络的算力共享,其整合多方算力资源,以全网算力资源池的形态为更趋多样化的应用提供更加灵活优质的算力服务[11]。基于“网—云、边、端”体系架构的算力一体化模型如图9 所示。
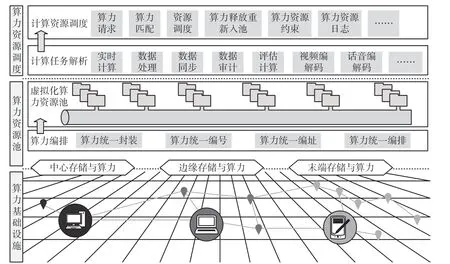
图9 算力一体化模型
3.2 设备集成模型
马赛克战强调功能分布与灵活重组。采用“小单元、快集成”模块设计,是实现功能单元紧凑集成和快速灵活重组、重构的关键技术途径。本文采用当前应用于航电系统的先进现场可更换模块(Linear Replaceable Module,LRM)架构模型设计马赛克战功能模块,具有模块化、快拆装、结构强、自识别功能模块、自适应健康管理等特性。设备集成模型如图10 所示。
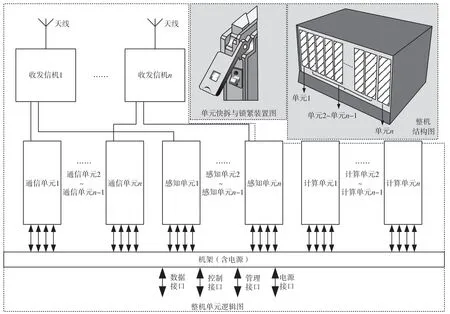
图10 设备集成模型
LRM 架构可将感知单元、通信单元、计算单元和存储单元在一致性模块中设计实现,这种集约化、紧凑型设计模型在物化实现时要重点考虑机箱强度设计、槽位互换性设计、电磁兼容设计、热设计、辅助插拔与锁紧结构设计等,可以提升整机设备维修性(将基层级、中继级、基地级3 级维修改进为基层级、基地级2 级维修)、可靠性(双外壳结构)、测试性(统一BIT 测试点)、保障性(统一接口、接插件、接口等),同时还可以提升系统通用化、标准化、组合化水平,并实现增强扩展、升级能力。
3.3 平台集成模型
马赛克战强调系统按需灵活重组。基于以上思想,战术通信系统平台的集成设计采用“平台与载荷解耦、模块化开放架构、总线化柔性互联”的设计思路,遵循特定标准,将各个基本模块都经过独特模块化和统一组合化集成设计,使作战单元探测、通信、判断、计算、决策、指挥、控制等基本功能模块组件能够在全生命周期内柔性按需修改、添加、删除和更换,各基本功能模块之间按需组合、协同自主形成整体功能可任意定制、任意组合的能力整体,且不依赖于不同承载平台的差异化,增加敌方对我方作战单元认知难度,提升系统灵活重组和重构能力和作战效能,满足开放性、可扩展、可升级、可进化的未来适应性需求。平台集成模型如图11所示。

图11 平台集成模型
采用该开放式架构集成模型,能够快速将作战能力集成在不同作战平台系统,可提升平台系统柔性拓展,并支持平台作战能力以小功能模块方式按需升级,有效推动作战效能发挥。
4 结语
本文首先对马赛克战进行了综述,包括其概念和特点、相关技术项目和发展方向,同步分析了其作战体系结构与交互模型、实施作战的效果网能力需求;其次依据马赛克战特点和交互模型、效果网能力需求完成了满足马赛克战特点和需求的通感算一体化网络架构和技术体系设计。在此基础上,进行了通感算融合一体化模型的空口收发信机、波形帧结构、算力一体化模型和设备、平台的集成模型设计。本文设计的架构体系和模型,与马赛克战强分布、高协同、灵活性、易重组需求进行了精确匹配,可以适应马赛克战对环境感知和通信自适应,并借助高度协同的算力网络资源自适应调度与匹配的作战需求,对助力打赢现代信息化战争,开展精干高效战术网络设计,提供了基础理论和设计思路支撑。
