基于COMSOL Multiphysics的椭圆齿齿板介质的颗粒捕集行为
2023-01-18孙自玺薛子兴荆子航卢东方王毓华郑霞裕
孙自玺,薛子兴,荆子航,卢东方,王毓华,郑霞裕
(中南大学 资源加工与生物工程学院,湖南 长沙,410083)
高梯度磁选(HGMS)是处理弱磁性物料的有效手段[1],在生物工程、制药工程、废物处理和水处理等许多领域均有应用[2-4],其中,应用最广泛的是矿物加工领域。在弱磁性矿物分选中,应用最广泛的是采用棒介质的立环脉动高梯度磁选机,但采用齿板介质的平环强磁选机在微细粒弱磁性矿物的分选回收方面表现出更优异的效果[5],被应用于各种弱磁性矿物的分选[6]、铁尾矿处理[7]及工业除铁[8]等。
虽然平环强磁选机在细粒弱磁性物料的分选中发挥了巨大作用,但其分选效果仍有待进一步提高,主要存在以下不足之处[9-11]:1) 磁系为水平磁系,漏磁系数较大,背景场强难以进一步提高;2) 采用齿尖角为90°的齿板介质,齿尖易磁化饱和,磁力作用深度较小;3) 齿板介质齿尖易磨损变形,导致分选环境恶化,分选指标不稳定。针对平环强磁选机开展结构优化以提高其分选效果是近年来的研究热点。磁系和磁介质是高梯度磁选机的两大核心组成部分,围绕这两方面开展结构优化以提高分选效果是可行途径。平环强磁选机磁系为电磁磁系,其能耗与背景场强的平方成正比[12],通过增大电流提高磁场强度往往带来巨大的能耗。因此,近年来强磁选领域的研究重心逐渐由提高磁场强度向提高磁场梯度转变[13]。而磁场梯度仅与磁介质的特性如形状、材质和尺寸有关。因此,通过优化磁介质来提高高梯度磁选的效果越来越受到研究人员的重视。
国内外研究人员从材料[14]和形状[15-16]等方面对磁介质进行了许多研究,但主要集中在棒介质方面,针对齿板介质的研究偏少。有研究表明:轴向配置(平环强磁选机采用的配置方式)下,椭圆形截面棒介质比正方形截面棒介质具有更优异的颗粒捕集性能[17]。而常规齿板介质的单齿类似于半个正方形截面棒介质,两者的磁场分布具有一定的相似性,且椭圆齿在磁场梯度与磁场深度的均衡性及耐磨损方面都较直角齿有优势,由此推测椭圆齿齿板介质具有优于常规直角齿齿板介质的颗粒捕集性能。
针对聚磁介质的研究主要包括实测法、数学建模及数值模拟。实测法过程繁琐,且只能进行定性分析;数学建模仅适用于圆形及椭圆形等较规则的介质类型的颗粒捕集性能研究[18],齿板介质周围磁场及流场分布无法通过公式精确地推导计算;数值模拟基于现代计算机仿真技术,可以对不同材料、形状的棒介质、齿板介质进行颗粒捕集行为的定量研究[19-20],并给出云图、等值线图和颗粒捕集范围等可视化结果,适用范围、便捷性及精确度都较数学建模有了巨大的提升,近年来得到了普遍的使用。
本文以常规直角齿齿板介质为基准,在保持介质填充率相同的条件下,通过COMSOL 仿真软件建立了直角齿齿板介质与一系列椭圆齿齿板介质的仿真模型,研究不同尺寸椭圆齿介质的磁场特性及其对磁性矿物颗粒的捕集性能,并与常规齿板介质进行比较,期望找到一种较适用于平环强磁选机的椭圆齿齿板介质。
1 颗粒运动仿真
1.1 物理模型构建
平环强磁选机属于轴向配置,高梯度磁选机轴向配置示意图如图1所示,齿板介质沿Z轴方向延伸,板面垂直于Y轴。矿浆从Z=0平面以速度v0给入,沿齿板介质延伸方向运动。外加磁场H0均匀分布于磁选空间内,方向垂直于齿板介质板面。

图1 高梯度磁选机轴向配置示意图Fig.1 Schematic diagram of axial HGMS
在高梯度磁选机中,矿浆中颗粒所受力除磁力与流体黏性力外还包括范德华力、双电层力和惯性力等[21-22],由于不同力的数量级相差很大,研究中通常忽略范德华力、惯性力和双电层力,仅考虑磁力与流体黏性力对颗粒的作用[23-25]。基于图1所示坐标系,由于磁力与流体黏性力在Z轴方向均无作用,故在整个分选区间内,给料矿浆沿Z轴以恒速v0运动。由于外加磁场为均匀磁场且齿板介质沿Z轴方向的形状恒定,故Z轴的任一XY截面上磁力分布均一致,即颗粒在XY平面的运动与Z轴方向的运动互不影响。将颗粒在三维空间中的运动简化为其在二维平面位置的变化时,颗粒在XY平面的运动情况能准确反映其在整个磁选空间的运动特点。因此,齿板介质周围颗粒运动的三维问题可简化为二维问题分析。
基于上述原因,选取XY截面为研究对象,用数值模拟软件COMSOL 建立了图2 所示的二维仿真模型,进行磁场分布特性、颗粒运动规律以及颗粒捕集性能的研究。图2中,流体区域材料设置为水,以恒速v0沿Z轴正向流动。齿板介质处于流体区域的正中心,外加磁场H0沿Y轴负方向均匀分布于整个研究区域。
由于磁介质产生磁力的作用范围有限,本文重点关注齿板介质外的小范围区域(图2 黄色区域外围长方形区域)。同时,由于齿板介质周围流场及磁场分布的对称性,为确保计算准确度的同时降低计算时耗,仅选取虚线所示的均匀流场区域的1/4作为颗粒释放区域以进行颗粒捕集研究。

图2 高梯度磁选的2D仿真模型中控制区域的示意图Fig.2 2D control area in the HGMS simulation models
本文基于常规齿板介质,保持介质充填率(截面积)不变,每个齿的截面积均为4.5 mm2,研究齿板介质椭圆齿设计对弱磁性矿物颗粒的捕集效果。图3 所示为不同长径比λ(椭圆齿Y轴与X轴方向轴长之比,即λ=b/a)的椭圆齿齿板介质及常规直角齿齿板介质(简称为椭圆齿介质与常规齿板介质)的截面示意图。模拟参数见表1。齿板介质的轴向长度L=0.1 m,矿浆的运动速度v0=0.1 m/s,故矿浆通过分选空间的时间为1.0 s,因此仿真中仅关注1.0 s内颗粒的运动状态。

图3 不同长径比的椭圆齿介质及直角齿介质截面图Fig.3 Cross-sections of conventional plates and elliptic tooth plates with different aspect ratios

表1 轴向高梯度磁选机系统的性能参数Table 1 Specifications of axial HGMS system
1.2 颗粒追踪模型
1.2.1 磁场控制方程
模拟区域内磁场满足磁通量守恒条件。流体域介质为水,其相对磁导率定义为1,即流体区域磁感应强度B与磁场强度H的关系满足:

式中:μ为磁导率;μr为相对磁导率;μ0为真空磁导率,为4π×10-7H/m。
聚磁介质的材质为工程纯铁,其B-H曲线如图4所示,聚磁介质区域的B与H满足:

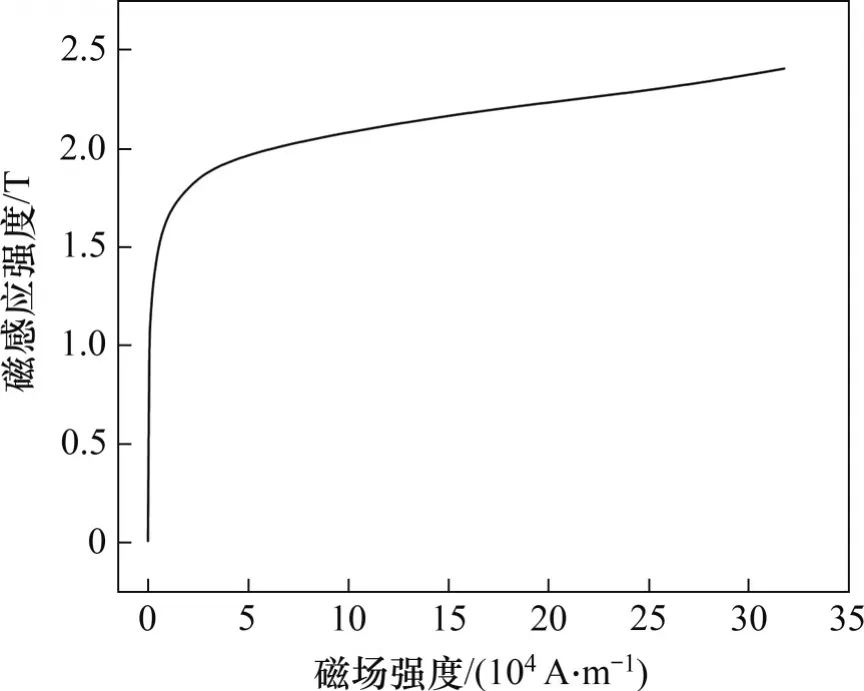
图4 工程纯铁的B-H曲线Fig.4 B-H curve of Engineering pure iron
如图3所示,指定二维模型最外侧红色边界为零标量磁势Vm=0。因磁场属于保守场,符合高斯磁通定律:

而高梯度磁选机分选空间内无电流:

由式(3)和式(4)可得磁势Vm与磁场强度H之间的关系为

1.2.2 流场控制方程
矿浆的初始速度v0=0.1 m/s,沿着磁介质延伸方向做匀速运动。同时矿浆可视为不可压缩流体,流体满足Navier-Stokes方程及连续性方程:

式中:ρ为流体密度;P为压力;v为流体速度;η为流体黏度。
1.2.3 颗粒追踪
对粒径为30 μm以下的细粒级颗粒而言,范德华力、双电层力、惯性力及扩散力等可忽略,仅考虑磁力和流体黏性力的作用,故颗粒的运动满足下式:

式中:mp为颗粒的质量;vp为颗粒的速度;FD和分别为作用在颗粒上的流体黏性力和磁力,

式中:R为颗粒的半径。
2 结果与讨论
2.1 磁场特性
2.1.1 磁力分布
高梯度磁选机中,颗粒所受磁力与磁场强度和磁场梯度的乘积H·gradH(称其为磁场力)成正比,故常用H·gradH作为指标对高梯度磁选机的性能做定性评价[26]。通过COMSOL 软件计算了B0=0.5 T时常规齿板介质和长径比λ=2的椭圆齿介质周围的磁场力,结果如图5所示。由图5可知,椭圆齿介质与常规齿板介质的磁场力分布相似:齿的上半部分,磁场力指向齿尖,吸引磁性颗粒,齿的下半部分,磁场力背离齿板,排斥磁性颗粒,即两种介质的齿尖处为磁性吸引区域而齿谷处为磁性排斥区域。

图5 B0=0.5 T时磁介质周围归一化H·gradH矢量分布Fig.5 Normalized H·gradH vector distribution around grooved plate under B0=0.5 T
局部放大的归一化H·gradH矢量分布如图6 所示。从图6可见:当磁感应强度B0=1.5 T时,常规齿板介质与椭圆齿介质的齿尖处仍均为磁性吸引区域,但齿谷处的磁场力分布特性有所不同:常规齿板介质齿谷处仍为磁性排斥区;对于椭圆齿介质,以距离齿谷底部一定距离处为分界面,分界面下方靠近椭圆齿处部分磁场力指向齿板,而齿谷中心线附近的磁场力仍指向上方,即在齿谷底部产生了磁性吸引区域,且对不同长径比椭圆齿介质的对比发现,随着长径比λ的增大,齿谷处磁性吸引区域的面积增大。

图6 局部放大的归一化H·gradH矢量分布Fig.6 Partially enlarged view of normalized H·gradH vector distribution around grooved plates
由以上分析可知,在低磁感应强度条件下,常规齿板介质与椭圆齿介质的齿尖附近均为磁性吸引区,齿谷附近均为磁性排斥区。初始位置位于排斥区的磁性颗粒将在斜向齿尖的排斥力的作用下背离齿板向上运动,在运动过程中部分颗粒受磁力作用逐渐向齿尖靠近并最终被齿尖捕集,另一部分颗粒则在磁力与流体黏性力的综合作用下远离捕集区域;但随着磁感应强度的增加(如1.5 T及以上),常规齿板介质的齿谷区仍为磁性排斥区,椭圆齿介质的齿谷底部将产生局部磁性吸引区域,初始位置位于椭圆齿齿谷底部的磁性颗粒将优先被磁性吸引区域捕集,其余区域的颗粒则在排斥力的作用下向上运动。且由图6中磁场力云图可知:B0=1.5 T时,椭圆齿介质的高磁场力区域(图中深红色部分)面积比常规齿板介质的大。因此,可以推测,随着磁感应强度B0的增加及椭圆齿长径比λ的增大,椭圆齿介质能够表现出比直角齿介质更优异的颗粒捕集性能。
2.1.2 磁力作用深度
为评估聚磁介质的颗粒捕集性能,以介质周围高磁场力区域面积表征介质磁力作用深度。图7所示为磁感应强度B0=0.5 T时齿板介质周围的磁场力云图,其中磁场力H·gradH≥1×1014A2/m3的区域显示为深红色。由图7可知,当椭圆齿介质的长径比λ=0.8 及1.0 时,椭圆齿介质的磁力作用深度比常规齿板介质的小。随着长径比λ的增大,椭圆齿介质的磁力作用深度逐渐增加,当λ=3.0时,椭圆齿介质的磁力作用深度已明显高于常规齿板介质的磁力作用深度。

图7 B0=0.5 T时磁介质周围H·gradH云图Fig.7 Contour plot of H·gradH around grooved plates under B0=0.5 T
为定量比较各条件下齿板介质周围磁力作用深度,计算了齿板介质周围磁场力H·gradH≥1×1014A2/m3区域所占的面积,结果见表2。由表2可知,两类齿板介质的磁力作用深度与磁感应强度成正比,且当磁感应强度一定时,椭圆齿介质的磁力作用深度随长径比λ的增大而增加。对比常规齿板介质与椭圆齿介质,当B0=0.1 T时,在所研究的长径比范围(λ=0.8~3.0)内,椭圆齿介质的磁力作用深度均比常规齿板介质的小;对于λ=0.8 与1.0的椭圆齿介质,在所研究的磁感应强度范围(B0=0.1~2.0 T)内其磁力作用深度均比常规齿板介质的小。而当椭圆齿介质长径比λ=1.5,2.0,3.0 且磁感应强度B0≥0.3 T时,椭圆齿介质的磁力作用深度均比常规齿板介质的大。

表2 H·gradH≥1×1014 A2/m3区域所占的面积Table 2 Surrounded area by isoline of H·gradH≥1×1014 A2/m3 mm2
2.2 颗粒捕集行为分析
2.2.1 颗粒群的运动分析
当t=0 s 时,颗粒释放区域(Z=0 mm)按密度均匀释放10 000 颗弱磁性矿物颗粒,颗粒在磁力和流体黏性力的作用下沿不同轨迹运动。以长径比λ=2.0 的椭圆齿介质为例,绘制了磁感应强度B0=1.5 T、颗粒直径Dp=15 μm,t=0,0.3,0.7 和1.0 s时颗粒的位置,结果见图8,图中,红色颗粒代表在1.0 s 内被齿板介质捕集的颗粒,绿色颗粒在1.0 s内未能被齿板介质捕集的颗粒,图8(a)中红色区域为被捕集颗粒的初始位置,此区域称为颗粒捕集截面[27],蓝色虚线为颗粒捕集区域的边界。

图8 B0=1.5 T,λ=2.0,Dp=15 μm时颗粒捕集截面变化Fig.8 Variation of particle capture cross section for B0=1.5 T, λ=2.0,Dp=15 μm
由图8可知,位于颗粒释放区域最外侧的颗粒所受磁力较小,在t=0~1.0 s 内其位置基本没有变化,故颗粒释放边界已非有效磁选区域,所选颗粒释放区域大小是合理的。此外,由红色颗粒的位置变化可知,颗粒群的运动趋势与上文磁力的变化相一致:初始位置靠近齿尖的颗粒在磁力作用下向齿尖聚集,初始位置位于齿谷附近的颗粒则在排斥力的作用下远离齿谷并逐渐向齿尖靠近,其中部分能在1.0 s 内被磁介质捕集。由图8 还可知,当磁感应强度为1.5 T时,长径比λ=2.0的椭圆齿介质的颗粒捕集区域为齿尖处与齿谷底部,这与上文所述当磁感应强度B0≥1.5 T时椭圆齿齿谷底部出现磁性吸引区域相一致。
2.2.2 颗粒运动轨迹分析
为了解不同初始位置颗粒的运动轨迹,在B0=1.5 T、λ=2.0、Dp=15 μm 的条件下,选取8 个具有代表性的颗粒,对其轨迹进行追踪,结果见图9,其中蓝色虚线为颗粒捕集边界。由图9可知,初始位置位于颗粒捕集边界上的颗粒(A1),在1.0 s 时恰好能被齿板介质捕集;初始位置位于颗粒捕集边界以外的颗粒(P1,P2)在1.0 s内均未能被齿板介质捕集;初始位置位于颗粒捕集边界以内的颗粒(A2~A6)在1.0 s内均能被齿板介质捕集。颗粒的运动轨迹有2类,位于齿尖上侧及齿谷磁性吸引区域的颗粒持续下降,如P2,A1,A2,A5,A6;位于齿谷磁性排斥区域的颗粒先上升后下降,如P1,A3,A4。这些现象与之前对磁场力分布状态的分析相符。

图9 B0=1.5 T,λ=2.0,Dp=15 μm时不同初始位置颗粒的运动轨迹Fig.9 Motion trajectories for 15 μm particles released from the vicinity of plate tooth under magnetic induction B0=1.5 T,λ=2.0,Dp=15 μm
2.3 颗粒捕集截面的变化
2.3.1 直角齿与椭圆齿颗粒捕集截面面积的比较
为直接反应各齿板介质对磁性颗粒的捕集效果,通过COMSOL 软件导出各时间节点下被释放颗粒的位置坐标及1.0 s 内最终被捕集颗粒的索引编号,而后通过Matlab 软件还原并计算不同条件下各类齿板介质的捕集截面面积,其中t=0 s 时不同磁感应强度下齿板介质对直径5 μm 和10 μm 磁性颗粒的捕集截面面积见图10。由图10 可知,在所研究的磁感应强度范围(0.1~2.0 T)内,高长径比椭圆齿介质的颗粒捕集截面面积比低长径比椭圆齿介质的大,且长径比λ=1.5,2.0,3.0 时,椭圆齿介质的颗粒捕集截面面积比常规齿板介质的大,这表明长径比λ较大的椭圆齿介质具有优于常规齿板介质的颗粒捕集性能。

图10 不同聚磁介质颗粒捕集截面面积随磁感应强度的变化Fig.10 Variation of particle capture cross-section with magnetic induction for plates with different aspect ratios
同时,各齿板介质对不同粒径颗粒的捕集截面面积随磁感应强度的变化表现出相同的规律:低磁感应强度下捕集面积随磁感应强度的增加迅速增加,当磁感应强度较高时,各齿板介质的捕集面积以基本相同的速率缓慢增加。这一规律与聚磁介质的磁化饱和有关:低磁感应强度下各聚磁介质均未达到磁化饱和,聚磁介质周围磁力随背景场强的增大迅速增大,直至聚磁介质达到磁化饱和后,聚磁介质周围磁力的增长速率趋于稳定。图11所示为齿板介质内部距离顶点0.2 mm处的磁场强度与背景磁感应强度的关系。由图11 可知:各齿板介质达到磁化饱和的先后顺序依次为直角齿、λ=3.0、λ=2.0、λ=1.5、λ=1.0、λ=0.8。除直角齿介质外,该顺序与图10 中各齿板介质颗粒捕集截面面积开始缓慢增加的先后顺序相同,其中直角齿介质因尖角易磁化饱和但磁力作用深度浅,其颗粒捕集截面面积的变化与λ=1.5的椭圆齿介质相当。

图11 磁介质内部距顶点0.2 mm处磁感应强度与磁场强度关系Fig.11 Magnetic induction as a function of magnetic field at 0.2 mm away from vertex of plates from inside
2.3.2 椭圆齿颗粒捕集截面面积随长径比的变化
为深入了解椭圆齿介质的颗粒捕集性能,分析椭圆齿介质的颗粒捕集截面面积与颗粒尺寸和长径比之间的关系,并探求是否存在与棒介质相似的最佳匹配关系[27]。图12 所示为不同磁感应强度下椭圆齿介质对5 μm 与10 μm 颗粒的捕集截面面积随长径比的变化。由图12 可知:当颗粒尺寸与磁感应强度一定时,椭圆齿介质对磁性颗粒的捕集截面面积变化规律相同:随着椭圆齿长径比的增大,颗粒捕集截面面积先增大,而后趋于平缓,当椭圆齿的长径比超过一定值时,颗粒捕集截面面积的增长基本停滞。且微粒的尺寸越大、磁感应强度越高时,颗粒捕集截面面积增长停滞时所对应的长径比越大。

图12 不同磁感应强度下椭圆齿介质颗粒捕集截面面积随长径比的变化Fig.12 Variation of particle capture cross-section of elliptical tooth plates with aspect ratio for different magnetic inductions
2.4 展望
本文研究对象为理想状态下的单块齿板介质,但在实际应用中,齿板介质往往以交错排布或相对排布的方式分布于高梯度磁选机中,如图13 所示。其磁力分布特性因相邻齿板间的相互影响会有所不同。排布方式、齿距S及齿尖距L等均会对齿板气隙间的磁力分布产生影响[28-29]。因此,下一步的工作将研究相邻齿板之间的耦合作用对磁性颗粒捕集行为的影响,并结合实际矿物颗粒捕集试验,为强磁选机中椭圆齿齿板介质的应用提供更为细致深入的研究数据支撑。

图13 齿板介质排布示意图Fig.13 Layout diagram of grooved plates
3 结论
1) 对两类不同形状的齿板介质,低场强下齿尖附近均为磁力吸引区域,齿谷附近均为磁力排斥区域,随着磁感应强度的增大,磁力吸引区域面积增大,磁力排斥区域面积减小。磁场强度或长径比增大到一定值时,椭圆齿介质齿谷附近也会产生磁力吸引区域。
2) 当椭圆齿介质长径比λ=1.5,2.0,3.0 且磁感应强度B0≥0.3 T时,椭圆齿介质的磁力作用深度均比常规齿板介质的大。
3) 分选空间中弱磁性颗粒的运动轨迹有两种:位于磁性吸引区域的颗粒持续下降,并逐渐向齿尖部分靠近;位于磁性排斥区域的颗粒先上升后下降,并有逐渐向齿尖部分靠近的趋势,其中部分颗粒最终能被齿板介质捕集。
4) 椭圆齿齿板介质的颗粒捕集性能随长径比的增大而增大。当λ≥1.5时,椭圆齿齿板介质的颗粒捕集性能优于常规直角齿齿板介质的颗粒捕集性能,即椭圆齿齿板介质在平环强磁选机中具有较大的应用潜力。
