基坑主动变形控制-轴力伺服系统应用探讨
2023-01-16杨红坡
周 勇,杨红坡
(深圳市岩土工程有限公司,广东 深圳 518028)
采用预应力加固的内支撑支护体系,通常认为是预应力钢支撑,具有提供主动抗力、减小基坑变形、支撑安装和拆卸方便等诸多优点,在城市建设基坑工程中得到广泛应用。
随着城市建设的发展,地下空间开发力度逐渐加大,一方面基坑深度越来越深,钢支撑的刚度和抗压承载能力有限,已不能满足支护结构强度需求;另一方面基坑周边环境越来越复杂,地下管线密布,尤其是地下交通工程发展建设,对基坑变形控制要求越来越严格。
传统的混凝土内支撑支护体系属于被动变形控制,根据JGJ 120—2012建筑基坑支护技术规程[1](以下简称规范),支撑无预加力时,只有当支护结构支点处发生变形时,支撑才会产生支反力以抵抗变形。根据相关文献[2-3]的研究,基坑开挖完成后最终呈现类似“大肚状”的变形形态,随着基坑开挖,围护结构水平位移逐渐累计增大。对于传统内支撑支护体系控制基坑开挖变形的问题,已有学者研究获得了具有价值的成果,如潘骏等研究表明支撑截面增大能减小支护桩最大水平位移,但增大至某一值后对位移减小作用不大[4];赵升峰研究表明增大支撑截面或增大支护桩径均能使支护结构变形减小[5];崔自治应用杆系有限元法研究表明支撑存在一个临界刚度,当支撑刚度达到临界刚度后,支撑刚度的变化对支护桩的内力和位移几乎没有影响[6]。从以往研究成果来看,都是通过增大支护结构刚度的方法来控制基坑最大变形[7],如增大支护桩直径、增大支撑截面、增加支撑层数等措施,基本也能满足常规一级基坑变形控制要求,但是对于某些超一级的基坑工程,传统的混凝土内支撑体系难以达到要求,而无限制的增加支撑层数又非常影响施工效率和成本。因此,有必要在传统混凝土内支撑支护体系中引入主动变形控制措施。
本文对主动变形控制原理和轴力伺服系统工作机制进行探讨,并依托实际工程,建立数值模型,对比分析考虑施工顺序的伺服轴力取值方案以及轴力伺服系统对基坑变形控制的效果,以期得到伺服轴力与支撑刚度两者之间的影响关系,更好地服务于现场工程实践。
1 主动变形控制原理
根据规范,内支撑支反力按下式确定:
Fh=kR(vR-vR0)+Ph
(1)
Δx=(vR-vR0)
(2)
其中,Fh为支点处支反力;kR为支点刚度系数;vR为支点处的水平位移值;vR0为支点的初始水平位移值;Ph为预加力;Δx为支撑安装后支护结构变形产生的支点处位移。
由式(1),式(2)可知支点处水平位移增量值:
(3)
由式(3)可知,当需要减小Δx时,可以采取增大刚度kR或者增大预加力Ph的方法。
2 轴力伺服系统工作机制
基坑工程按照施工顺序,根据内支撑层数和地下结构层数会形成若干个施工工况,目前普遍使用增量法[8]进行研究。众所周知,在基坑开挖阶段均采用先挖后撑的施工工序,各层支撑安装前挡土结构均存在一个初始变形Δxi0,每次开挖被动区卸荷相当于主动区产生一个土压力增量ΔEak,使挡土结构产生一个大小不等的增量变形Δxi,在回筑阶段每层支撑拆除时支撑应力释放,均会使挡土结构出现一个大小不等的增量变形Δyi。
TOT模式是指:政府将已投入使用的基础设施项目的运营管理和维护权移交给私营企业,并在特许经营期内从私营企业获取利润用于建设新的基础设施项目;特许经营期满后,私营企业无偿将设施的经营权交还给政府。TOT模式由于不涉及建造环节故前期工作量较少,运作程序亦相对简化,而且该模式仅转让线路的经营权,没有涉及产权、股权的变更,可有效减少政府和民间资本合作纠纷,也保证了政府对铁路这一特殊基础设施的所有权,项目风险相对较低,相应投资收益也较低,且国有资产的评估易造成国有资产的流失,因此该模式通常应用于经营性非新建项目。
若要控制基坑支护全生命周期的总变形,必须控制每一个工况下的初始变形Δxi0、增量变形Δxi和Δyi。轴力伺服系统则根据基坑变形特征,结合每一个工况对开挖面以上各支点的影响,提前一个工况调整各层伺服力从而调整支撑轴力,以平衡下一个施工工况产生的增量效果,达到控制挡土结构变形的目的。轴力伺服系统由伺服箱体、压力调控箱以及室内线上管理系统组成,伺服箱体与传统钢筋混凝土内支撑变形控制端连接,其支护模型如图1所示。
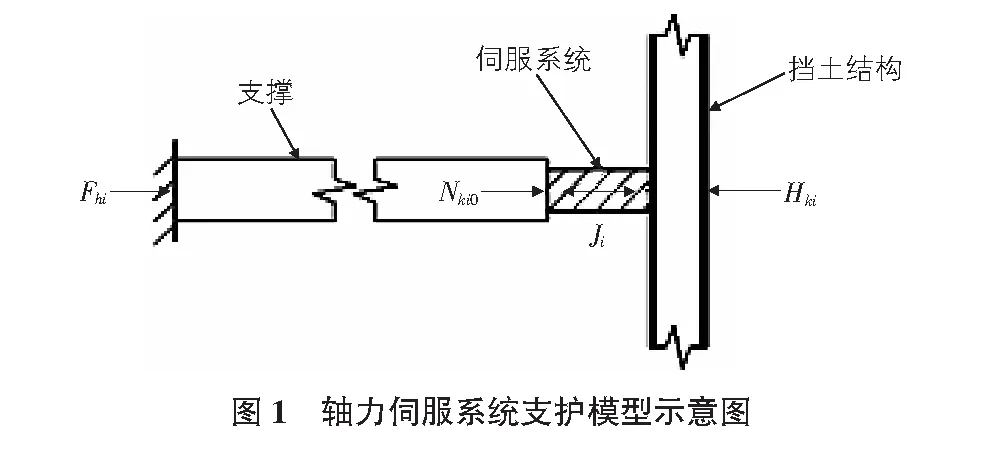
图1中各参数满足以下平衡关系:
Fhi=Nki0+Ji=kri×Δxri=Hki
(4)
轴力伺服后的支撑轴力为:
Tki=Nki0+Ji=kri×Δxi+Ji
(5)
其中,kri为第i层支撑刚度系数;Δxri为第i层支撑总弹性变形;Fhi为第i层支撑支反力;Nki0为第i层支撑增量变形为Δxi时对应的支撑轴力;Δxi为第i层支点处的增量变形;Ji为伺服系统施加的伺服力;Hki为第i层支撑段挡土结构上的土体压力;Tki为第i层支撑轴力。
3 伺服轴力取值方法
轴力伺服系统在工作时须同时满足两个必要条件:
条件一:最大伺服力Jmax≤伺服系统额定承载力设计值Rd。
条件二:支撑总压缩变形Δxri≤伺服系统内置千斤顶的有效行程ΔLi。
在应用过程中,充分利用轴力伺服作用使挡土结构变形满足要求。根据式(4)和式(5)可知,调整kri或Ji均可以平衡土体压力,但Ji的影响力度比kri大得多,在挡土结构增量变形恒定时,伺服轴力的取值与支撑刚度呈负相关。
按基坑施工工序,每层支撑完成后在下一个工况时产生支反力,以此支反力作为本层支撑的初步伺服轴力参与分析计算,进而得到相应的内力和变形增量,根据变形情况判定伺服轴力是否合适,否则调整伺服轴力后重新分析计算,依此直到伺服轴力取值合理。同理,可以确定往后各工况下本层支撑的伺服轴力。最终以施工工况为横坐标,伺服轴力为纵坐标,可以得到本层支撑在其全生命周期的伺服曲线。
4 算例分析
4.1 工程概况
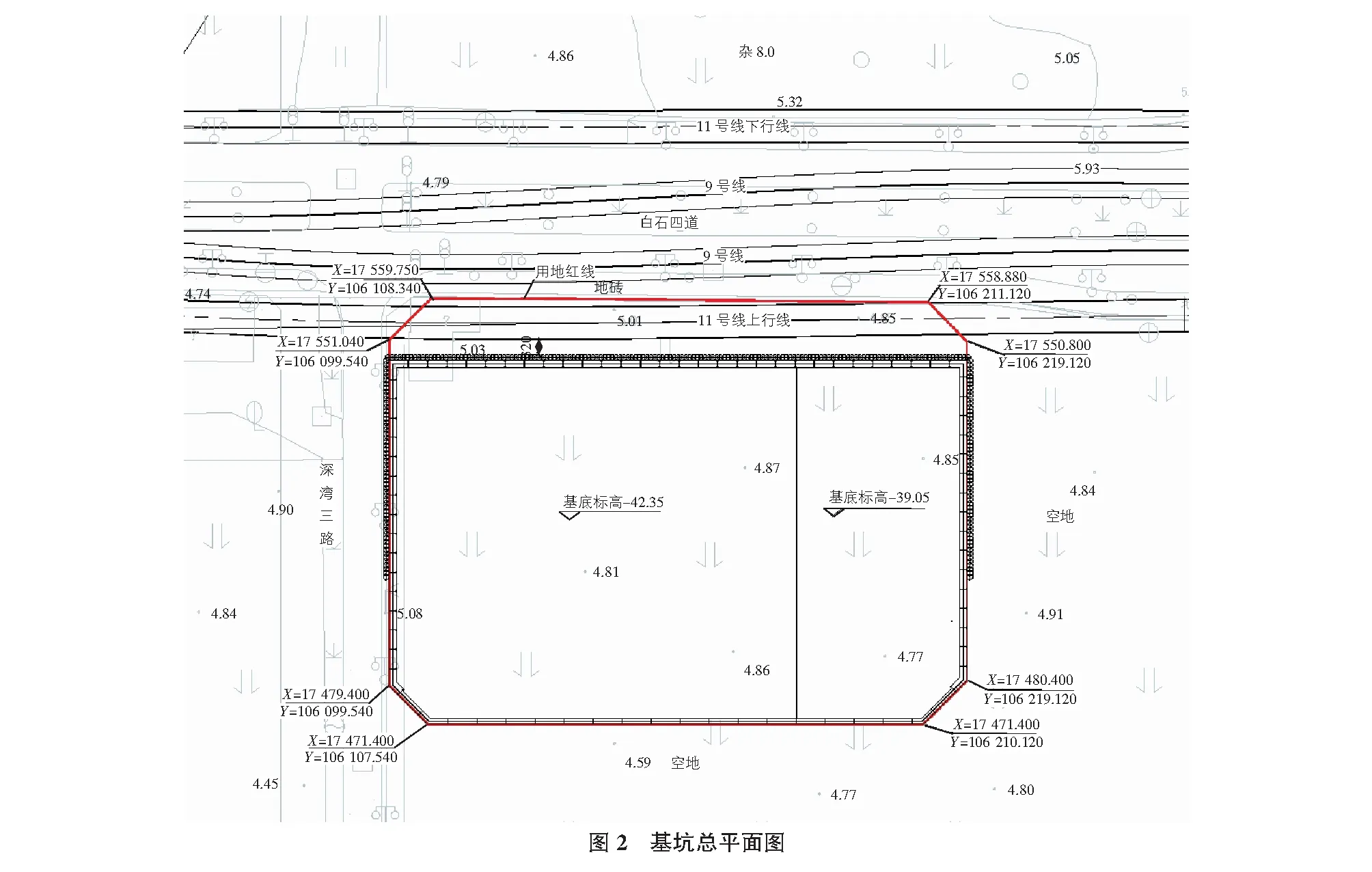
深圳市南山区某项目,基坑呈矩形,东西长118 m,南北宽74 m,基坑支护长约370 m,开挖面积约8 451 m2,设置6层地下室,基坑开挖深度38.95 m~42.25 m。
基坑北侧紧靠地铁11号线和9号线,北侧地下室外墙距地铁11号线右线隧道结构外边线最近约4.4 m,隧道埋深17 m~21.9 m,位于基坑半腰位置,基坑总平面图如图2所示。按深圳市地铁集团的要求,隧道变形控制值10 mm,基坑支护挡土结构变形控制值20 mm,需严格控制围护结构施工及基坑施工的变形对地铁的影响。
4.2 地质条件
项目位于深圳湾滨海软土区,场地地质构造和风化球(孤石)发育,基岩埋深起伏大,地理环境特殊,工程地质条件、水文地质条件、环境条件复杂。具体岩土物理力学参数如表1所示。
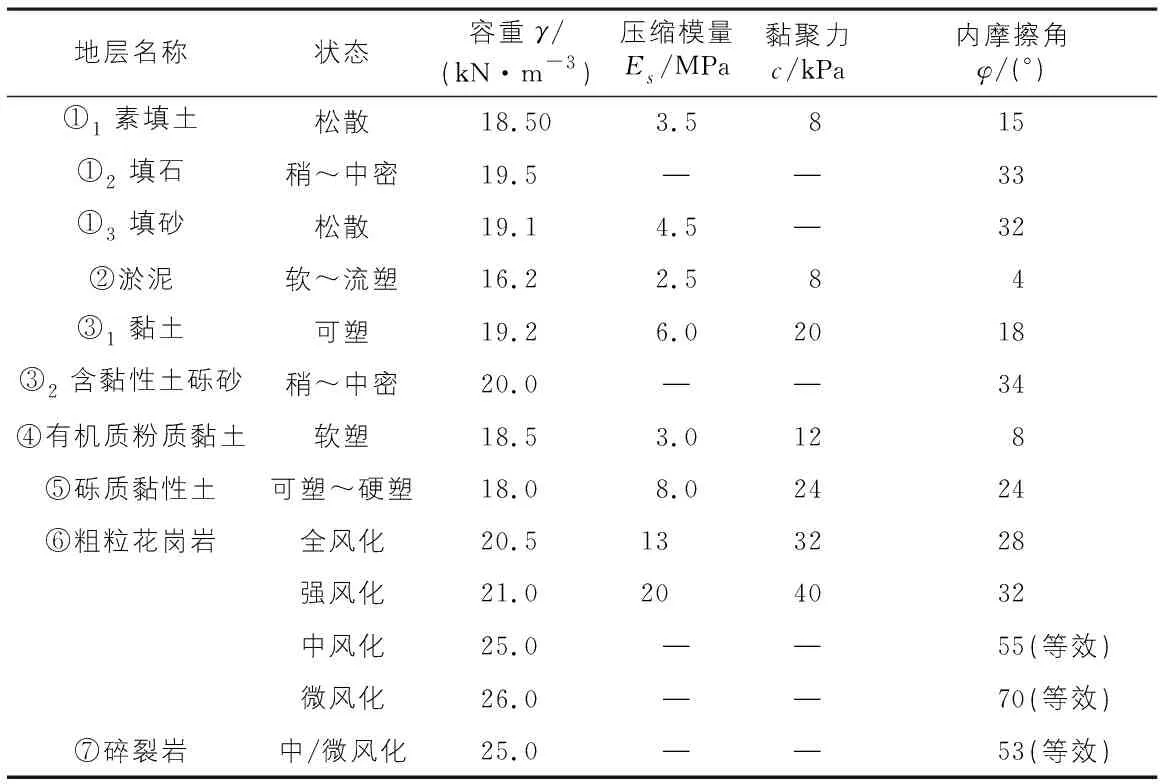
表1 岩土物理力学参数表
4.3 支护形式及设计参数选取
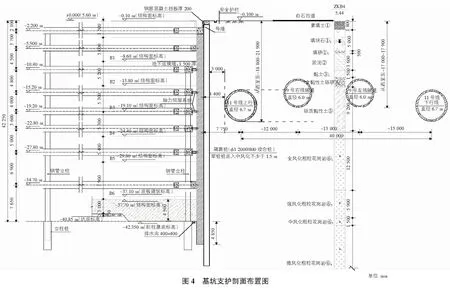
基坑采用地下连续墙配合八道钢筋混凝土内支撑挡土,北侧和东西侧地连墙厚1.5 m,南侧地连墙厚1.2 m,地连墙兼作地下室外墙,有效墙深约53 m。为减小地连墙施工对地铁隧道的影响,北侧地连墙外侧提前设置一排1.2 m直径的荤素咬合隔离桩,为控制基坑施工对地铁隧道的影响,北侧第3道~第7道内支撑引入轴力伺服系统,伺服系统间距2.0 m,承载能力设计值5 000 kN,总行程200 mm。
设计计算取2个超载,其中一个15 kPa条形荷载,临基坑边,宽18 m,一个为道路荷载25 kPa。基坑支护平面布置如图3所示,北侧支护剖面布置情况如图4所示。

4.4 计算模型工况
根据施工顺序,不计地连墙和隔离桩施工工况,本工程全生命周期一共有31个工况,具体如下:
工况一:开挖第一层土方;工况二:施工第一道支撑;工况三:开挖第二层土方;工况四:施工第二道支撑;工况五:开挖第三层土方;工况六:施工第三道支撑;工况七:开挖第四层土方;工况八:施工第四道支撑;工况九:开挖第五层土方;工况十:施工第五道支撑;工况十一:开挖第六层土方;工况十二:施工第六道支撑;工况十三:开挖第七层土方;工况十四:施工第七道支撑;工况十五:开挖第八层土方;工况十六:施工第八道支撑;工况十七:开挖到基坑底;工况十八:B6底板施工;工况十九:拆除第八道支撑;工况二十:B5层地下室施工;工况二十一:拆除第七道支撑;工况二十二:B4层地下室施工;工况二十三:拆除第六道支撑;工况二十四:拆除第五道支撑;工况二十五:B3层地下室施工;工况二十六:拆除第四道支撑;工况二十七:B2层地下室施工;工况二十八:拆除第三道支撑;工况二十九:B1层地下室施工;工况三十:拆除第二道支撑;工况三十一:拆除第一道支撑。
4.5 计算结果分析
支护结构第八道支撑未设置伺服系统,根据计算分析,在第七道支撑支点处总变形接近零时,第十五和十七两个开挖工况下产生的初始位移为14 mm,之后第十九和二十一两个拆撑工况下产生的增量变形3.4 mm,此时累计最大水平位移已达到17.4 mm,接近控制值20 mm,因此,可以认为第十四工况前的所有工况及后续拆换撑工况的挡土结构变形应按接近零控制。
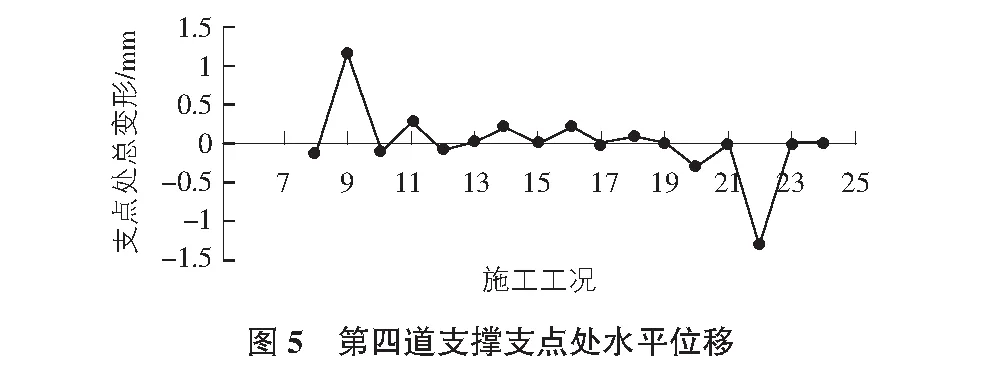
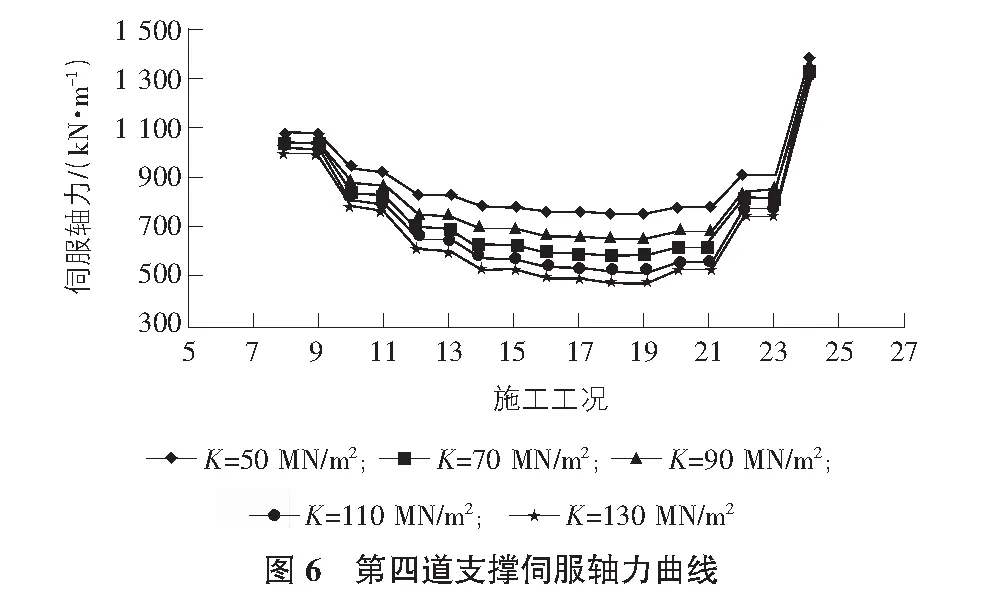
根据前文伺服轴力取值方法,以第四道支撑作为研究对象,对比不同支撑刚度系数时伺服轴力的取值结果。图5为不同支撑刚度下第四道支撑在各工况的支点处水平位移控制值。图6为不同支撑刚度下第四道支撑的伺服轴力曲线。由图6看出,伺服轴力在开挖加撑工况时逐渐减小,在拆换撑工况时逐步增大,呈下抛线形态,变化幅度随支撑刚度增大而增大,K=50 MN/m2时变化幅度为45.8%,K=130 MN/m2时变化幅度为62.5%,不同支撑刚度时的初始伺服力和最终伺服力差异很小,每级刚度之间相差约1.47%~1.87%。根据式(5),伺服轴力的变化同时也反映出第四道支撑轴力的变化情况。
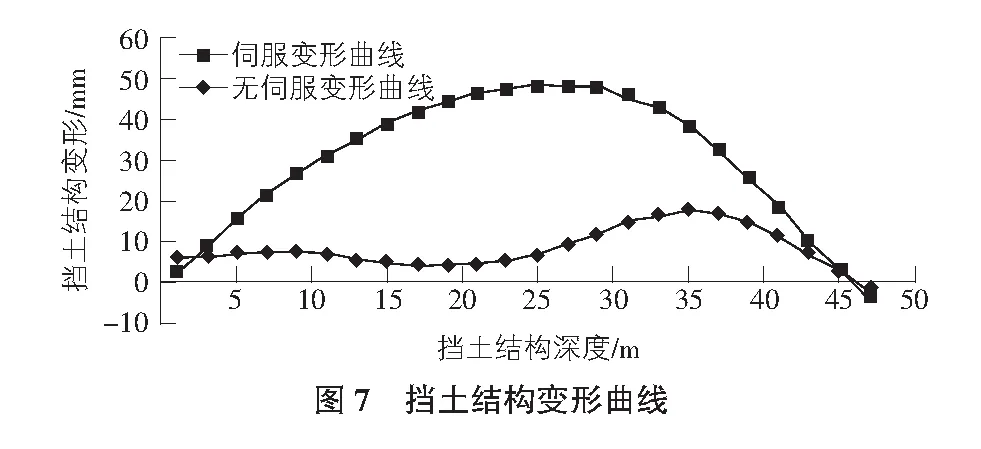
伺服支撑层取刚度K=50 MN/m2对基坑整体进行分析计算,计算参数和结果如表2所示,并且得到伺服前后挡土结构在基坑全生命周期的变形曲线如图7所示。
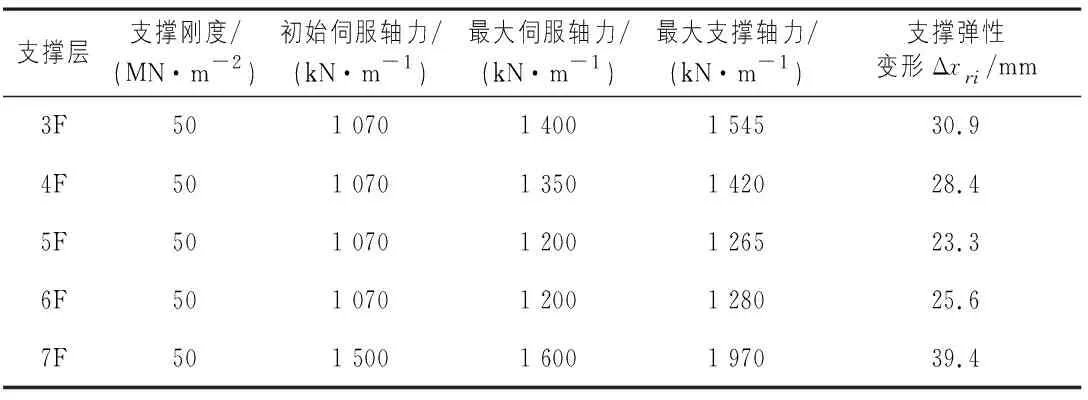
表2 伺服系统支撑层计算结果
由表2可以看出,支撑刚度为50 MN/m2时,最大伺服轴力1 600 kN/m,远小于伺服系统承载力设计值,支撑压缩变形量最大39.4 mm,远小于伺服系统的有效行程,可以进一步减小支撑刚度,缩减成本。
由图7可以看出,无轴力伺服时,挡土结构最大变形已接近50 mm,且变形最大位置在25 m深度,对基坑外临近地铁的影响最大;采取轴力伺服时,挡土结构最大变形在20 mm以内,且变形最大位置在35 m深度左右,满足变形控制要求,有效减小对周边环境的影响。
5 结论
采用弹性地基梁法结合增量法,对考虑施工顺序时伺服轴力取值结果进行分析,初步得到以下结论:
1)在钢筋混凝土内支撑支护体系中引入轴力伺服系统,可以按需求主动控制基坑全生命周期各工况下围护结构的变形,有效控制基坑施工对周边环境的影响。2)引入轴力伺服系统后,支撑的刚度不再作为基坑变形的控制条件,支撑截面尺寸以强度控制原则进行选择。3)支撑刚度的变化主要影响本层支撑在其以下开挖加撑工况和拆换撑工况时的伺服轴力,对初始伺服力和最大伺服力基本没有影响。4)在满足伺服系统工作时的两个必要条件下,可以选用最小刚度的内支撑体系节省成本。
