一种高层建筑楼梯清扫机器人的结构设计
2023-01-06时光升董慧芳杨佳宾王海波席盈盈王明鑫胡健
时光升 董慧芳 杨佳宾 王海波 席盈盈 王明鑫 胡健
巢湖学院机械工程学院 安徽巢湖 238024
随着时代的发展,城市里高层建筑越来越多,由于高层建筑中楼梯的数量与层数都较高,随之就出现了高层建筑楼梯清洁困难这一难题。针对该难题现有的解决方式是雇用清洁工人来进行清洁,但高层建筑楼梯采用人工清洁时清洁效率较低且人工成本高昂,并在清洁过程中伴有一定的人身安全隐患,因此,人工清洁这种方式并不适用于对高层建筑楼梯的清洁。
机器人技术的不断发展与进步给这个难题带来了转机,为解决日常生活里清洁工作效率较低和成本高昂的问题,扫地机器人这种智能清扫吸尘工具被研发了出来,该类机器人可以高效率低成本地完成各种清洁工作[1];国内外市场上也相继出现了中国科沃斯、荷兰飞利浦、美国IRobot等众多扫地机器人的品牌供人们选择[2-3],尽管扫地机器人的品牌如此繁多,却很少有针对高层建筑楼梯清扫问题的类型,主要原因在于普通扫地机器人在平时的清扫工作中难以跨越楼梯上的台阶结构[4-5]。因此,针对普通扫地机器人难以攀爬楼梯这个难题,以及市场中缺少可以清扫高层建筑楼梯的扫地机器人这个现状,本文设计出一种拥有攀爬楼梯能力的高层建筑楼梯清扫机器人很有必要。
1 高层建筑楼梯清扫机器人总体结构简介
本文设计的高层建筑楼梯清扫机器人,其整体结构如图1所示。主要分为行走机构、攀爬机构和清扫机构三个部分。其中行走机构由行走电机、转向电机和万向轮组成;攀爬机构由攀爬电机、连杆和传动轴组成,四个攀爬电机对称分布在楼梯清扫机器人左右两侧的前端与后端;清扫机构由吸尘装置、清洁滚筒和清洁毛刷构成,吸尘装置内置在楼梯清扫机器人的中部,由吸风机和垃圾存储盒组成,垃圾存储盒内有抽拉式存储盒和垃圾防倒置挡板两大结构,清洁滚筒由大型清洁滚筒和小型清洁滚筒两种类型组成,大型清洁滚筒安置在楼梯清扫机器人的底端,小型清洁滚筒安置在楼梯清扫机器人的前端。清洁毛刷则由滑动清洁毛刷和转动清洁毛刷两种组成,滑动清洁毛刷位于楼梯清扫机器人前端与小型清洁滚筒配合进行楼梯侧面的清洁,转动清洁毛刷位于楼梯清扫机器人的底端,与大型清洁滚筒配合进行楼梯地面的清洁。
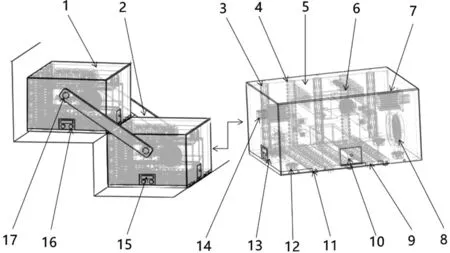
1.机器人外壳;2.连杆;3.小型清洁毛刷;4.小型清洁滚筒;5.电源装置;6.吸风机;7.攀爬电机;8.无线充电装置;9.大型清洁滚筒;10.垃圾存储装置;11.大型清洁毛刷;12.万向轮;13.智能控制中枢;14.传动轴;15.显示屏;16.控制按钮;17.光电传感器图1 高层建筑楼梯清扫机器人的整体结构
2 高层建筑楼梯清扫机器人工作原理
该楼梯清扫机器人的工作原理由路线感应与识别、智能行进与楼梯攀爬、组合式清洁三大部分组成。该机器人的智能控制中枢先对清扫路线进行识别,通过位于光电传感器和红外测距传感器对机器人进行位置检测并反馈至控制中枢进行数据分析处理,规划合理的行进路径,控制中枢驱动转向电机与行走电机实现机器人直线和转向行驶。当该机器人在到达楼梯边缘时,智能控制中枢将前进模式切换为攀爬模式,此时位于该机器人后端的两根传动轴在攀爬电机的控制下进入自由转动状态,位于前端的两根传动轴随着攀爬电机的工作开始转动,将机器人后端抬起并传送到上一层台阶面处,完成对上一层台阶的攀爬。此后,所有攀爬电机停止工作,继续开始对台阶面的横向进行清洁工作。如此循环,实现对整段楼梯的攀爬和清扫工作。
3 高层建筑楼梯清扫机器人的部分结构设计
3.1 万向轮部分结构的设计
万向轮部分结构由驱动轮、行走电机、转向电机、大锥齿轮、小锥齿轮、齿轮、齿圈、滚子、旋转滚动滑槽和固定外壳组成。行走电机位于万向轮顶端,通过齿轮机构与驱动轮相连接,齿轮机构由一大一小两个锥齿轮组成,行走电机运行时带动小锥齿轮在水平方向上转动,小锥齿轮水平方向转动带动大锥齿轮进行竖直方向上的转动,通过齿轮传动将行走电机的水平方向转动转化为驱动轮的竖直方向转动,以此实现驱动轮的前进与后退。转向电机、齿轮、齿圈、滚子与旋转滚动滑槽则构成万向轮的转向系统,转向电机位于行走电机侧端,与齿轮转向机构相连接,齿轮转向机构由齿轮与齿圈组成,当转向电机启动时,与转向电机连接的齿轮也随之在齿圈内转动,同时也带动位于万向轮固定外壳上端的滚子开始滚动,滚子沿着万向轮固定外壳上的旋转滚动槽进行滚动,带动万向轮底部的驱动轮的方向进行改变,直至到达所需方向后转向电机停止工作,驱动轮方向确定。该万向轮通过转向电机控制驱动轮方向和行走电机控制驱动轮启停,实现该轮向所有方向行动的功能。如图2所示,为万向轮部分结构的示意图。
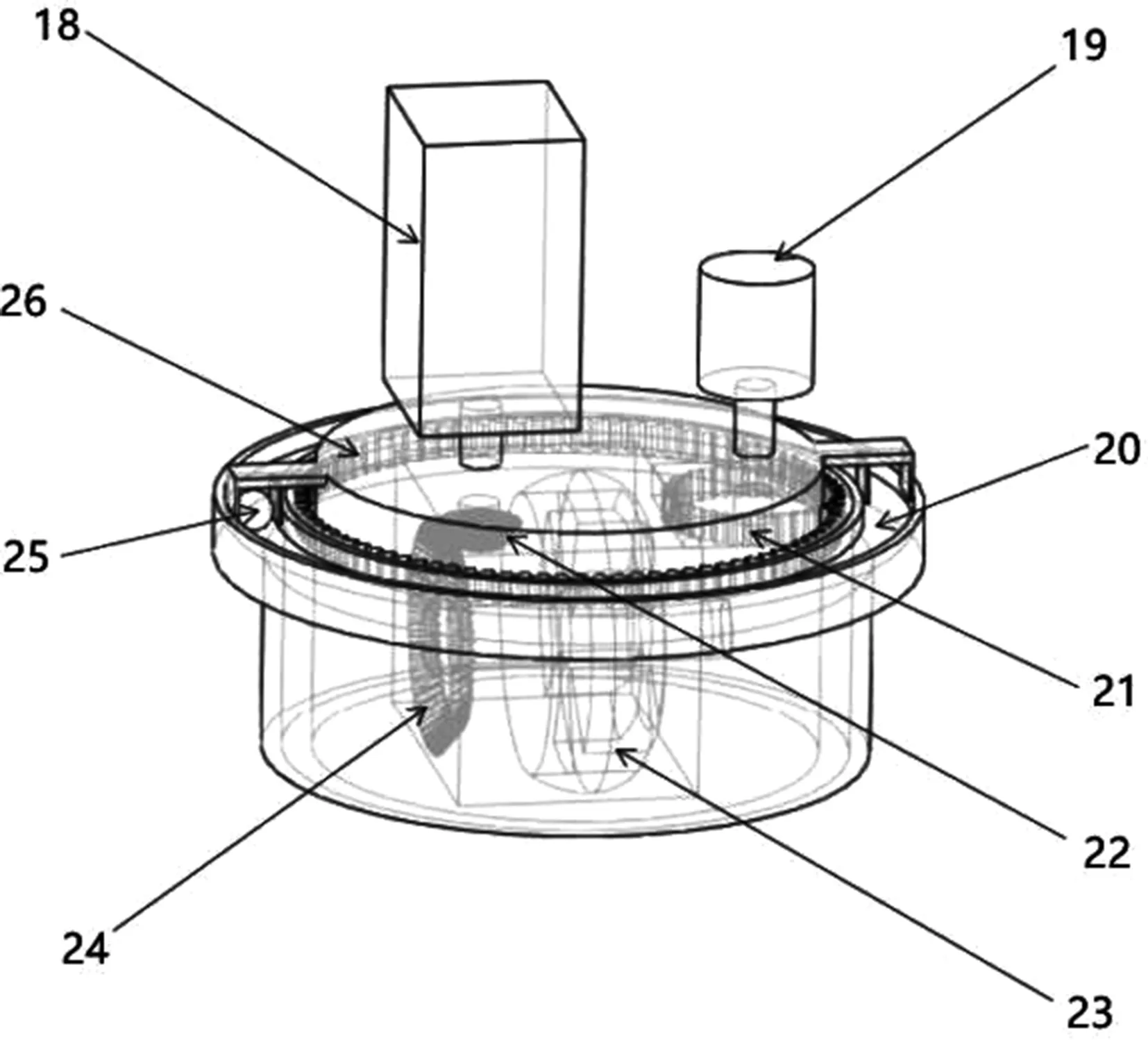
18.行走电机;19.转向电机;20.旋转滚动槽;21.齿轮;22.小锥齿轮;23.驱动轮;24.大锥齿轮;25.滚子;26.齿圈图2 万向轮部分结构示意图
3.2 吸尘装置部分结构的设计
吸尘装置部分结构由吸风机、垃圾存储盒、垃圾防倒置挡板、电源装置和两个吸风口组成,吸风机位于吸尘装置的顶端前段,四周及顶端被吸尘装置保护壳所包裹着,下端连接着吸尘装置的主体,左侧和右侧一共两个吸风口,位于吸尘装置主体的底端,两个吸风口的中间是垃圾存储盒;垃圾存储盒由可抽拉式存储盒、红外测距传感器和齿轮齿条式开关组成,当红外测距传感器检测到存储盒内垃圾存储满时会反馈给智能控制中枢,智能控制中枢会反馈至显示屏上显示盒内垃圾已满,此时转动齿轮齿条式开关可拉出可抽拉式存储盒倒出垃圾;在两个吸风口的上方有两个倾斜放置并且可以活动的垃圾防倒置挡板,这两个垃圾防倒置挡板同时也与垃圾存储盒的顶端开口相连接;吸尘装置工作时,吸风机启动并产生向内吸取的风力,通过吸尘装置内部通道将吸力传输至垃圾防倒置挡板处,使可活动的垃圾防倒置挡板被吸力吸动向上抬起,使吸力继续传输至吸风口,将吸风口下方的垃圾吸起,在通过垃圾防倒置挡板后落入垃圾存储盒内;吸尘装置停止工作时,吸风机停止运行,吸力消失,垃圾防倒置挡板落下并回归原位置,此时垃圾被封闭于垃圾存储盒中且无法掉出,实现了对清扫过程中垃圾的存储功能。
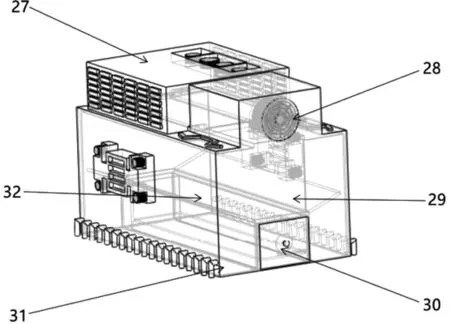
27.电源装置;28.吸风机;29.垃圾防倒置挡板;30.齿条式开关;31.吸风口;32.垃圾存储盒图3 吸尘装置部分结构示意图
3.3 攀爬楼梯装置的结构设计
攀爬楼梯传动装置的主体位于高层建筑楼梯清扫机器人的左右两个侧端面。该装置由攀爬电机、传动轴和连杆组成,四个攀爬电机分布于机器人两个侧端的前端和后端,传动轴位于每个攀爬电机与连杆连接的位置,连杆通过四个传动轴上的花键将位于机器人前端和后端的攀爬电机两两连接在一起。装置运行时,位于机器人后端的两根传动轴在攀爬电机的控制下进入工作状态,此时传动轴可随重心变化随意转动,位于前端的两根传动轴随着攀爬电机的运行开始转动,由于传动轴上花键的特殊结构,传动轴同时会带动连杆一起进行旋转,此时机器人后端被抬起并随着传动轴转动而从后方向前方移动位置,直至后端被移至下一阶楼梯上稳定之后,所有攀爬电机停止工作,传动轴不再转动。此时实现对上一阶楼梯的攀爬,循环往复该流程即可实现对整段楼梯的攀爬。
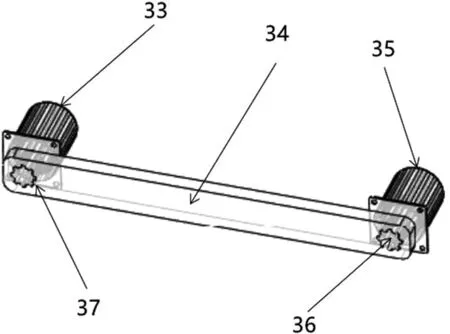
33.前端攀爬电机;34.连杆;35.后端攀爬电机;36.传动轴;37.花键图4 攀爬楼梯装置部分结构示意图
结语
本文设计了一种高层建筑楼梯清扫智能机器人的结构,其结构简单、操作方便、工作高效,智能化、自动化程度较高;通过攀爬电机、传动轴与连杆组成的攀爬机构实现对楼梯的攀爬,配合行走电机、转向电机与万向轮组成的行走机构和吸尘装置、清洁滚筒、清洁毛刷组成的清扫机构,协同实现了对高层建筑楼梯的攀爬与清扫,提高了高层建筑楼梯清扫效率的同时,减少了高层建筑楼梯清扫对人力资源的依赖,填补了扫地机器人市场中存在的空缺。
