尾翼直径对超空泡射弹小角度入水弹道特性影响研究
2023-01-06张云治郭则庆
张云治,郭则庆,孙 帅
(南京理工大学 瞬态物理国家重点实验室, 南京 210094)
1 引言
射弹高速入水是一个包含空气、水蒸气、液态水等多相发展的复杂过程。当射弹从空中高速进入水中时,水被射弹排开形成空泡,空气随之填充空泡,与此同时空泡内部表面由于压力下降液体发生空化,形成了由空气和水蒸气混合的气泡。射弹继续运动后空泡在液面附近发生闭合,射弹周围变为完全由水蒸气组成的超空泡。高速入水过程中空泡结构发生快速变化,射弹结构与空泡表面发生剧烈相互作用,射弹的入水稳定性和阻力特性受到射弹结构、入水角、攻角、初始扰动等多个因素的影响,发展过程非常复杂。由于其复杂性和鲜明的军事应用价值,射弹高速入水研究受到了国内外学者的广泛关注。
在试验研究方面,Lee等[1]基于大量的试验数据、数值模拟结果和表面闭合理论,研究了刚性格球体高速垂直入水的空泡特性,提出了一个球体入水空泡闭合理论模型。Kulkarni[2]研究了超空泡弹丸的物理特性,建立了射弹与空泡壁接触和射弹不与空泡壁接触2个阶段运动的数学模型。郭子涛[3]从实验和理论三方面研究不同弹头的高速入水,建立弹丸入水空泡特性的解析模型。Song[4]对圆柱射弹以35°~90°、80~127.5 m/s进行了试验,发现射弹的入水过程中旧空泡的塌陷与新空泡扩张交替发生。李宜果[5]开展了圆柱射弹以45°~90°、150 m/s左右速度斜入水试验,提取极值位移与姿态角和空化数的关系并进行曲面拟合,获得喷溅环与空泡壁面极值位移的激励关系。Chen[6]开展了射弹以20°~45°、150 m/s左右速度入水试验,研究发现射弹阻力系数主要受弹头形状影响。Truscott[7-8]主要利用高速摄像技术对不同形状射弹以5°~15°入水角、380 m/s速度入水过程的跳弹现象进行了研究,结果表明长径比、空化器直径等参数对入水弹道稳定性有显著影响。侯宇[9]在水靶道中试验研究了尾翼式超空泡射弹以8°入水角、650 m/s左右速度入水过程,得到了入水冲击瞬间弹体姿态对喷溅形成、弹道轨迹变化和水下压力波传播的影响。
近年来,得益于计算机技术的进步,射弹入水过程的数值研究取得了快速的发展。陈晨[10]考虑气、汽、液三相流体的可压缩性,对射弹以400 m/s垂直入水进行数值模拟,分析了流体可压缩性对激波、空泡演化、流场特性的影响。郝博[11]等采用数值方法研究了尾翼楔角对六尾翼枪弹的垂直入水阻力和运动稳定性影响。郝亮[12]对圆柱形射弹在入水攻角-3°~3°的以1 500 m/s、45°入水角度的斜入水过程进行仿真研究,分析得出射弹跨声速入水过程中,液体可压缩性对射弹受力特性和流场结构有较大影响。王晓辉等[13-14]对尾翼式超空泡射弹带初始攻角条件下的以1 000~1 500 m/s速度、60°入水角斜入水过程开展了数值研究,得到了攻角对尾翼射弹入水空泡特性和弹道稳定性的影响。Akbari等[15-16]在Truscott试验研究[7-8]的基础上,进一步研究了带阶梯的圆柱锥射弹在10°~60°入水角范围内的入水稳定性影响,结果表明阶梯可提高射弹小角度入水的稳定性。周可[17]对尖头射弹以150 m/s、8°~25°斜入水进行仿真研究,分析得到形成跳弹主要原因是射弹头尾两侧受力不均。祁晓斌[18]对尾翼式超空泡射弹以825 m/s、5°~10°入水角度开展了仿真计算,结果发现入水初期的空泡不对称性会导致弹体抬头形成正攻角,引起跳弹和失稳。
在跨介质超空泡射弹设计时,为了兼顾空中和水下稳定性,一般采用尾翼式结构。在入水过程中尾翼不可避免会与水面发射碰撞冲击,尾翼直径对入水稳定性和阻力特性都有较大的影响。因此,文中将研究不同直径尾翼的射弹在10°~30°范围内的入水稳定性,为射弹尾翼直径的设计提供参考。
2 数值模拟方法
2.1 流体控制方程
流体体积(VOF)多相模型能够解析混合相界面上的网格模拟几种互不相溶流体的流动。在高速小角度入水过程中,存在着液体、气体、水蒸气三相,VOF多相模型能准确捕捉空泡的形状和特征。流体的控制方程如下:
连续性方程,所有相的质量守恒方程表示为:
(1)
式中:ui为流体微团在x、y、z轴上的速度分量;ρm为混合相中各相的密度,其表达式为:
ρm=αlρl+αgρg+αvρv
(2)
式中:αl、αg、αv分别为水相、空气相、水蒸气相的体积分数;ρl、ρg、ρv分别为水相、空气相、水蒸气相的密度。
动量守恒方程为:
(3)
式中:uj为流体微团在x,y,z轴上的速度分量;P为流体压力;Fi为流体微团在x,y,z轴上的受力;μm表示混合相动力粘性系数。
考虑流体的可压缩性,引入能量方程:
(4)

Tait方程用于忽略温度影响可压缩流体的状态方程:
(5)
K=K0+nΔp
(6)
Δp=p-p0
(7)
式中:p0为参考压力101 325 Pa;ρ0为参考压力下的液体密度,取1 000 kg/m3;K0为参考压力下的体积弹性模量,取2.2 GPa;n为密度指数,取7.15。
将空气相和水蒸气相视为理想气体,状态方程为:
p=ρgRT
(8)
式中:R为气体常数;ρg为气体密度。
2.2 空化模型
采用的空化模型为Schnerr-Sauer模型,由Rayleigh-Plesset空化模型简化,忽略了空泡的加速度、黏性效应和表面张力效应的影响。其控制方程如下:
(9)
(10)
(11)
2.3 射弹运动方程
研究三维空间中射弹的入水过程,需要准确定义射弹运动以及作用在射弹上的力和力矩。射弹的运动方程描述如下[15]:
(12)
(13)
(14)
式中:[X,Y,Z]和V=[VX,VY,VZ]分别是射弹的质心位置和速度矢量;M和F分别是作用在射弹上的力矩和力;mp和I分别是射弹的质量和惯性矩; [θ,φ,ψ]是射弹的旋转角度,ω是射弹的角速度。
3 方法验证及模型设置
3.1 数值方法的验证
从两方面对文中的数值模型进行验证。首先是射弹入水产生的空泡与空泡经验公式的对比。Savchenko等[19]通过大量试验总结了超空泡尺寸的经验公式,具体表示如下:
(15)


图1 模拟空泡与经验公式曲线Fig.1 Comparison between calculated cavitation and empirical formula
此外,还计算了圆柱形射弹在380 m/s速度下小角度入水的空泡形态变化过程,并与文献[7]中的实验结果进行了对比,如图2所示。数值计算的空泡变化、入水冲击、水表面的扩张、射弹尾拍和尾拍造成的空泡变化,可以看出试验拍摄的入水现象与计算结果基本一致。因此,使用的数值方法能以较高的精度模拟射弹的小角度入水问题。

图2 空泡形态变化过程的计算结果与试验结果图Fig.2 Comparison between calculation results and tests
3.2 计算模型
针对不同尾翼直径的尾翼式超空泡射弹的小角度入水问题,进行了入水角为10°、20°、30°的高速入水数值模拟研究。在Truscott试验[7-8]中可知,平头空化器形状的射弹入水性能较好,因此射弹空化器均采用平头空化器形状,如图3所示。射弹空化器直径为3 mm,尾翼直径不同且为六尾翼结构,整弹长径比L/D=15。
射弹的质心位置及转动惯量数据如表1所示。质心位置以射弹弹底为基准。射弹初始速度为1 000 m/s,初始自转和章动角速度均为零,3个射弹在均在指定角度和位置入水,总计9个工况。
接着是两条五花龙睛,翩若惊鸿,宛若游龙。我照顾得无微不至。每天早起、回家,第一件事就是看它们是否活着。但最终还是死了,我有些难过,却也大煞风景地如释重负。

图3 不同尾翼直径的射弹示意图Fig.3 Projectiles with different tail diameters

表1 射弹结构参数Table 1 Structural parameters of a projectile
3.3 边界条件及求解设置
使用STAR-CCM+进行数值模拟,计算方法基于有限体积法(FVM),采用二阶隐式格式来离散控制方程和VOF模型的扩散对流项,利用SIMPLE算法的分离流求解器求解压力和速度的耦合问题。为了清晰模拟液面溅射现象,需要对水面的网格局部加密。采用重叠网格和六自由度动力学方法模拟射弹的入水过程。
计算域及边界条件如图4所示。其中θ为射弹的入水角,速度入口边界速度设置为0,压力出口边界压力与静压有关,采用静水压强的场函数进行设置。图5所示为射弹及重叠区域网格,对射弹空化器附近进行局部加密,并在射弹外表面设置棱柱层以获得高质量的网格。

图4 计算域示意图(D=10 mm)Fig.4 Calculation domain diagram (D=10 mm)

图5 计算网格图Fig.5 Calculation grid diagram
3.4 网格无关性验证
对20 mm尾翼射弹入水进行网格无关性验证,建立3种不同数量的网格,数量分别为289万(网格最小尺寸为0.5 mm)、538万(网格最小尺寸为0.25 mm)、714万(网格最小尺寸为0.125 mm)。入水角度为10°,如图6所示为射弹入水0.5 ms时的速度曲线。由图可知,最小网格尺寸减小到0.25 mm后,可以忽略因网格大小造成的计算误差。综合考虑计算精度和计算成本,采用的最小网格尺寸为0.25 mm(即case2对应的网格规模)。整体网格数量因射弹结构不同略有差异,但最小网格尺寸均控制在了0.25 mm。

图6 不同网格数量的射弹入水速度曲线Fig.6 Calculation results of different grid numbers
4 结果与讨论
4.1 入水空泡特性分析
图7显示了20 mm尾翼射弹在撞击水面0.2 ms内空泡的变化。射弹入水方向与水面成10°夹角,取射弹头部与水面接触时间为t=0。左侧为水相体积分数为10%的等值面图,能清晰的看见空泡的轮廓,右侧为射弹速度方向的后视角图,可以看到射弹对水面冲击造成的液体飞溅。t=0.05 ms时,头部空化器冲击水面形成空泡,空泡开始包裹射弹且处于扩张阶段。t=0.1 ms时,空泡已经能包裹一半射弹,后部尾翼开始接触水面,此时空泡尺寸还较小,尾翼刺穿空泡壁的深度较大,造成液面的二次飞溅。t=0.15 ms时,头部空化器形成的空泡已经包裹大部分射弹,尾翼刺穿空泡壁深度减小,两者生成的空泡与头部空化器形成的空泡未完全融合。空化器造成的水面溅射以及尾翼造成的二次飞溅加剧。t=0.2 ms时,空化器形成的空泡已经能全部包裹住射弹,射弹只有头部空化器处于沾湿状态。

图7 0.2 ms内20 mm尾翼射弹入水示意图Fig.7 Water entry diagram of 20 mm tail fin projectile in 0.2 ms
图8为对应的压力云图。从图中可以看出:0.05 ms时,受到自由液面的影响,头部空化器周围压力变化明显且压力场分布不对称;前锥段下表面压力有一定上升,这是因为射弹还没有完全浸入水中,空泡发展尚不充分,前锥段下表面与水发生碰撞。

图8 入水压力云图Fig.8 Cloud diagram of water inlet pressure
0.1 ms时空泡已包裹射弹主体,尾翼周围压力出现了较大变化,这是由于尾翼直径较大,空泡尺寸不足以包裹住尾翼,尾翼与液体表面发生冲击,如图8(b)。0.15 ms时射弹继续深入水面,由于空泡尺寸的变大,尾翼刺穿空泡壁的深度降低,如图7所示,造成尾翼受到的压力减小,表现为图8(c)中尾翼周围压力场变化。0.2 ms时,空泡已充分发展并将射弹尾翼完全包裹,仅头部受到了较大的压力冲击,并且此时头部压力场分布受水面影响减小而分布均匀。
图9为尾翼直径分别为15 mm和10 mm的射弹在0.1 ms和0.2 ms时的入水姿态水相等值面图。与图7对比,0.1 ms时,尾翼均开始触碰到水面,由于尾翼大小的不同,10 mm尾翼几乎没有对水面造成形状上的变化,15 mm尾翼也只是轻微改变了水面的形状。结合图8(b)和图10中的0.1 ms时尾翼附近的压力变化(图中白色虚线圆圈标注区域),可以得出此时尾翼受到的压力大小为20 mm尾翼>15 mm尾翼>10 mm尾翼。0.2 ms时,射弹均被空化器产生的空泡完全包裹,结合图7还可看出尾翼激起的水面飞溅20 mm尾翼最大,15 mm尾翼次之,10 mm尾翼几乎没有。图10压力云图中,0.2 ms时仅射弹的空化器周围存在压力场分布,并且与图8的变化一致受水面影响减小而分布均匀。

图9 15 mm(a)和10 mm(b)尾翼射弹 在0.1 ms和0.2 ms时的入水示意图Fig.9 Water entry diagram of 15 mm (a) and 10 mm (b) tail fin projectiles at 0.1 ms and 0.2 ms

图10 15 mm(a)和10 mm(b)尾翼射弹 在0.1 ms和0.2 ms时的压力云图Fig.10 Pressure nephogram of 15 mm (a) and 10 mm (b) tail projectiles at 0.1 ms and 0.2 ms
4.2 入水弹道特性分析
4.2.1阻力系数分析
(16)
式中:Fd为射弹受到的阻力;ρ为水的密度;v为射弹速度;r0为射弹半径。
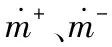
图11为射弹在入水过程中受到的阻力系数曲线。由图可以清晰的看到射弹在入水过程的阻力系数峰值以及其对应的时刻。0.1 ms前尾翼没有参与入水,3种射弹阻力系数变化一致,在头部撞击水面是出现第一次阻力系数峰值,约0.075。以图11(a)为例,0.1~0.2 ms是尾翼参与入水的主要阶段,20 mm尾翼射弹受到的阻力最大,阻力系数峰值为0.119,15 mm尾翼射弹的阻力系数峰值为0.080,10 mm尾翼射弹的阻力系数0.1 ms后基本不变。0.2 ms后,入水初始阶段结束,阻力系数下降到了0.07左右,后续基本保持不变,这是因为此时仅射弹头部沾湿,沾湿面积达到最小,见图7和图9。但20 mm尾翼射弹在0.2 ms后阻力系数缓慢上升并在0.9 ms后继续下降。这是因为射弹的俯仰角发生变化导致尾翼刺穿上半部分空泡壁。图12为0.8ms时射弹前侧视图的压力云图,可以看到,20 mm尾翼射弹的上半部分尾翼承受了较高的压力,显然已经刺穿空泡壁,而10 mm和15 mm尾翼表面上压力较低,说明其仍处于被空泡包裹状态。同时射弹尾翼表面上不同的压力变化,使得0.2 ms后20 mm尾翼射弹受到的阻力最大,10 mm尾翼射弹最小。符合图12射弹在0.2 ms后阻力系数曲线的大小规律。
20°入水和30°入水的情况,如图11(b)和图11(c),可以看出,同种射弹不同角度入水的阻力系数变化规律是一致的。对于20 mm尾翼射弹的阻力系数曲线,随着入水角度的增加,其在0.2 ms内的阻力系数峰值下降到了图11(b)的0.106和图11(c)的0.100,对应于图中的压力云图,其中白色虚线为自由液面的位置。0.2 ms后,另两射弹并没有因为入水角的增加而有大的变化,阻力系数稳定维持在了0.07附近。

图11 射弹入水阻力系数曲线Fig.11 Water entry resistance coefficient of a projectile
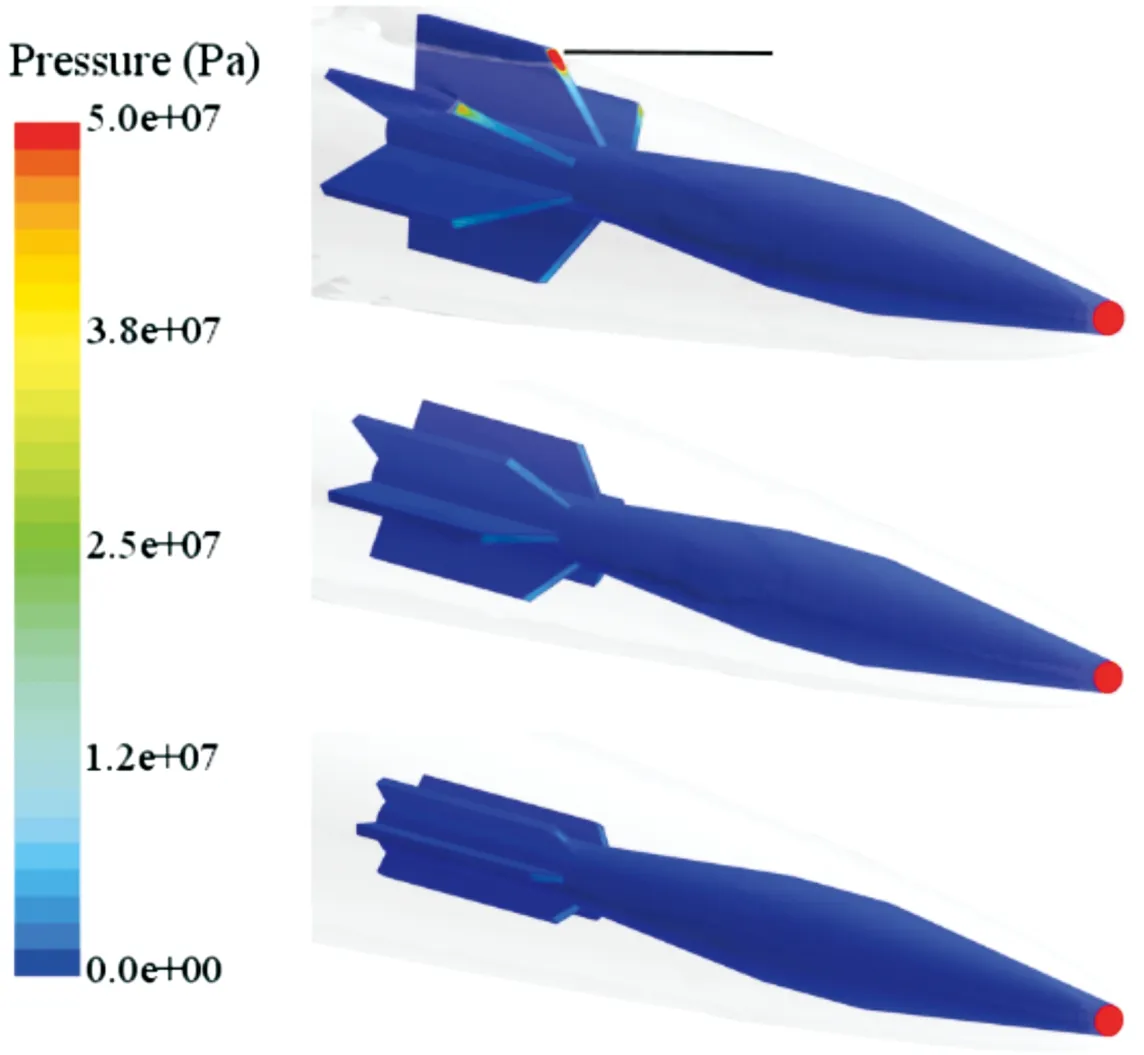
图12 10°入水0.8 ms时射弹表面压力云图(前侧视图)Fig.12 Front side view of projectile surface pressure at 0.8 ms of 10° water entry
4.2.2速度分析
图13(a)为射弹在10°入水随时间变化的射弹速度曲线。由图可以看出,不同的尾翼直径对速度的影响较大。入水1 ms时,速度最高的是15 mm尾翼射弹,速度最低的则是 20 mm尾翼射弹。
本次计算中,射弹的转动惯量和质心位置和质量都是不同的,见表1。图13(a)的放大部分,射弹在0.2 ms内速度变化了2次。首先是0.1 ms内的初期入水阶段,此时有空化器和射弹前锥段与水接触,3种射弹所受阻力基本相同,但由于质量差异,20 mm尾翼射弹速度衰减最慢,10 mm尾翼射弹速度衰减最快。0.1 ms后射弹尾翼相继入水,此时受尾翼影响,20 mm尾翼射弹所受阻力最大,导致其速度迅速衰减,变为最低,15 mm尾翼射弹速度最快。
图13(b)和图13(c)为射弹20°入水和30°入水的曲线。随着入水角度的增加,15 mm尾翼射弹的速度优势没有变化。但是,20 mm与10 mm尾翼射弹的速度变化趋势受角度影响。10°入水时,因为20 mm尾翼射弹受到的阻力较大,10 mm尾翼射弹在0.2 ms后速度完全超过了前者;20°入水时,20 mm尾翼射弹的尾翼受到的阻力减小,速度曲线已经紧贴10 mm尾翼射弹,仅在0.9 ms后,10 mm尾翼射弹的速度才稍微超过前者。30°入水的情况下,20 mm尾翼射弹的尾翼受到的阻力继续减小,0.2 ms后10 mm尾翼射弹的速度曲线与前者完全重合。
4.2.3俯仰角分析
图14(c)和图14(d)分别为30°入水的俯仰角变化和俯仰力矩曲线。由图可以看出,0.1 ms的初期入水,射弹空化器和前锥段使得射弹受到的俯仰力矩增加,射弹的俯仰角均因此减小;0.1 ms后尾翼开始接触水面的影响,不同的尾翼规格使得俯仰运动出现了3种情况。首先是20 mm尾翼射弹,尾翼入水使其受到的相反的俯仰力矩最大,其俯仰角迅速增大。0.2 ms后尾翼入水的影响消失,俯仰力矩接近0,但由于大尾翼的影响,0.35 ms后射弹受到的俯仰力矩持续增加,这造成了射弹的俯仰角增加变缓且在0.9 ms后开始减小;15 mm尾翼射弹和10 mm尾翼射弹的情况类似,受到的俯仰力矩未能抵消初期入水的影响,射弹的俯仰角持续减小。其中15 mm尾翼射弹受到的影响更大,其俯仰角减小的速度更快。0.3 ms后两者射弹受到的俯仰力矩均为0,直到最后射弹的俯仰运动不再发生改变。
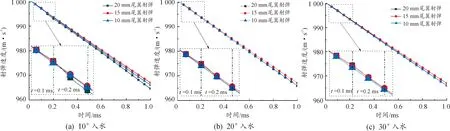
图13 射弹入水速度变化曲线Fig.13 Change of projectile entering water speed

图14 射弹入水俯仰角及俯仰力矩曲线Fig.14 Pitching angle and moment of projectile entering water
如图14(a)和图14(b),可以看出入水角度的变化不会影响射弹俯仰运动的运动趋势,只会影响射弹俯仰运动的程度。随着入水角度的增加,射弹俯仰运动程度变缓。从计算可以看出,15 mm尾翼射弹在入水的俯仰运动上具有明显优势。
图14(a)中20 mm尾翼射弹10°入水状况,射弹俯仰角变化有往复运动的趋势,将计算域扩大,增加射弹运动的时间,得到图15的俯仰力矩和俯仰角变化曲线。可以看到,射弹在初期入水影响后,俯仰力矩和俯仰角变化均呈现出振荡变化规律,使得射弹的运动维持在一个相对稳定的状态。射弹形成尾拍后的最大俯仰角速度约150 rad/s,尾拍周期约为 2 ms,且4.5 ms俯仰角振荡幅度逐渐扩大的现象,与梁景奇[20]计算初速为1 000 m/s的尾翼射弹水中尾拍现象的俯仰角曲线趋势一致,再次验证了计算的准确性。

图15 俯仰角与俯仰力矩曲线Fig.15 Angle and pitch moment
5 结论
对3种不同尾翼直径的尾翼式超空泡射弹的小角度入水进行了数值模拟,对空泡特性和弹道特性进行分析,得出以下结论:
1) 0.1 ms前射弹入水状态是一致的,0.1~0.2 ms之间,尾翼接触到水面后,激起了水的飞溅并阻碍射弹的运动。0.2 ms之后,射弹被空化器产生的空泡完全包裹,此时受到的阻力大大减少。
2) 射弹速度受到射弹结构参数以及尾翼与水的冲击的影响,15 mm尾翼射弹存速能力最强。
3) 在不同入水角情况下,15 mm尾翼射弹的入水俯仰运动都最为平稳。
4) 相同结构射弹,随着入水角度的增加,射弹的俯仰运动变缓。
