线结构光传感器测量特性的测试分析*
2022-12-26孙衍强石照耀
刘 艺,孙衍强,石照耀,于 渤
(北京工业大学 北京市精密测控技术与仪器工程技术研究中心,北京 100124)
0 引 言
近年来,光学测量技术在现代工业检测领域中得到了快速的发展和广泛的应用,特别是线结构光测量技术,具有原理简单、测量速度快、测量精度高、可连续测量、可测量柔性物体等优点[1,2],目前已被广泛应用于位移检测、轮廓检测、三维形貌扫描[3]等领域。
线结构光传感器作为光学测量仪器中的常用元器件,由于其具有测量效率高、测量范围广、分辨率高[4]、操作简单[5]的优势,多被用于现场测量场合(比如,测量齿轮表面质量[6,7]、公路平整度[8]、铸钢车轮尺寸[9]、激光拼焊焊缝[10]、轨道车辆、车体外形尺寸[11]等)。
然而受到各种内外部因素的影响,线结构光传感器的测量特性表现存在差异,影响测量的精度,因此值得重视和研究。
李昱坤等人[12]提出了一种线结构光传感器静态性能测试方法,并针对传感器的静态性能,即稳定性、重复性、线性度进行了测试,通过分析得到了线性度对测量精度影响较大的结论。GESTEL N V等人[13]对线结构光传感器进行了性能评估测试,测试结果表明,传感器开机未经预热时存在测量误差。FENG H Y等人[14]测试了传感器不同扫描深度对测量结果的影响,结果显示,随机误差随扫描深度变化而不同。吴剑锋等人[15]研究了环境温度等因素对传感器测量结果的影响,研究结果表明,当测量环境存在500 ℃温差时,激光束会发生弯曲,从而引起测量误差。SONG Li-mei等人[16]使用了线结构光传感器测量校准球,得到了其点云数据,将其与标准模型数据进行了对比,通过球面拟合了计算误差,结果表明,线结构光传感器在测量物体的边缘和顶点时需要进行整体点云滤波处理。
目前,业界对线结构光传感器测量特性的研究较为分散,未从多层面对其进行分析。笔者设计一种线结构光传感器测试平台,研究传感器的内部因素(内部温度、测量区域位置、曝光时间)和外部因素(测量物体性质、环境光强)对线结构光传感器测量特性的影响情况。
1 线结构光传感器工作原理
线结构光传感器采用三角测量原理,如图1所示。

图1 三角测量原理
激光器发射激光束照射在被测物体表面A点处,反射光束经由透镜聚焦至光电探测器的B点,此时,入射光束与反射光束夹角为α,反射光束与光电探测器夹角为β。
激光器与被测物体表面距离变化y时,光电探测器上的相对像移为x,其关系为:
(1)
式中:a—测量点成像物距;b—测量点成像像距。
由线结构光传感器的工作原理可知,影响其测量特性的因素主要有:
(1)内部温度。线结构光传感器采用半导体激光器,激光器的输出特性随传感器内部温度的变化而不同;
(2)测量区域位置。受到透镜、光电探测器等传感器自身元件影响,测量区域内不同位置的测量稳定性存在差异;
(3)曝光时间。曝光时间决定了光电探测器及激光器的持续开启时间,影响到传感器的接收光量;
(4)测量物体的性质。不同测量物体的表面性质会导致反射光角度和强度产生变化,影响测量结果;
(5)环境光强。不同强度的环境光会干扰传感器处理反射激光束信息,影响测量结果。
2 测试平台
线结构光传感器测试平台如图2所示。

图2 线结构光传感器测试平台1—阻尼隔振光学平台;2—激光干涉仪;3—导轨;4—气浮滑块;5—反射镜;6—传感器测量物体;7—升降台;8—支架;9—组合微调平台;10—线结构光传感器
图2中,放置测量物体的升降台和激光干涉仪的反射镜被一同安装在气浮滑块上,并随滑块一同运动;工控机通过控制器对线结构光传感器进行设定及控制,传感器的测量数据通过控制器传输至工控机;激光干涉仪采集的数据同样传输至工控机。
为避免气浮导轨系统带来的定位误差,笔者使用激光干涉仪作为线结构光传感器测试平台的长度基准;组合微调平台可实现传感器六自由度的位姿调整;升降台可保证不同规格的测量物体处在传感器测量范围内进行测试。
3 测试对象
笔者选用两款不同厂家的线结构光传感器作为测试对象,其主要性能指标如表1所示。

表1 传感器主要性能指标
两传感器的有效测量区域如图3所示。

图3 传感器的有效测量区域示意图
4 影响因素测试分析
4.1 传感器内部温度影响的测试及分析
在工作过程中,线结构光传感器中的半导体激光器的温升会影响其输出特性,进而影响传感器的测量特性。
笔者设置测试环境温度为20±0.5 ℃,保持测试环境及传感器的参数设置不变,将量块工作面作为被测面,置于传感器有效测量区域内Z轴方向的基准距离处,传感器关机,待传感器内部温度降到室温后重新开机,以1 s采集1次数据的速度记录内部温度及测量结果的变化量。
传感器A内部温度与测量结果随时间变化曲线,如图4所示。
图4中,7条测量结果随时间的变化曲线,分别代表传感器A在X∈[-7.5 mm,7.5 mm]范围内的7个测量点,覆盖X方向的整个测量范围。
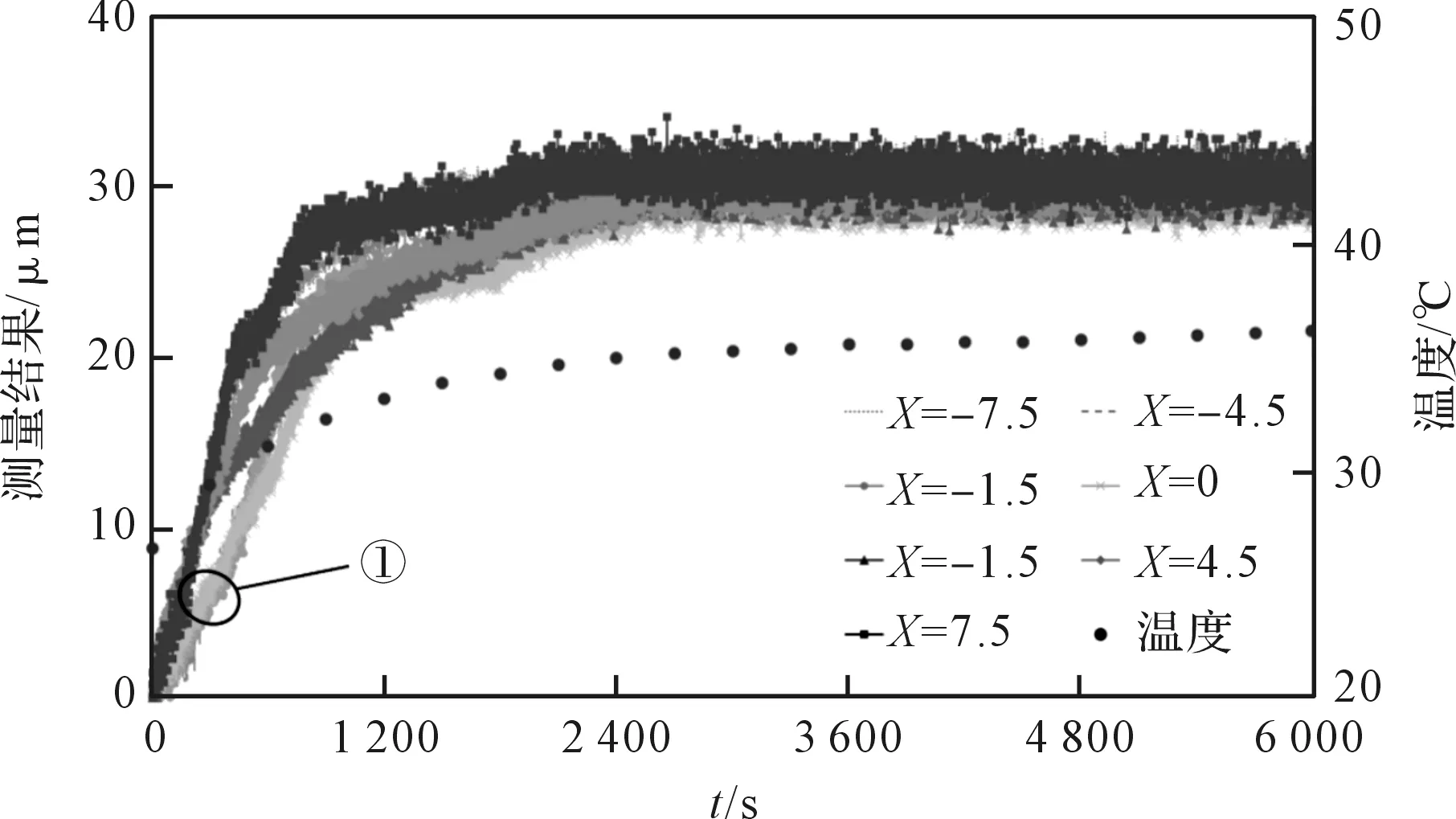
图4 传感器A内部温度与测量结果随时间变化曲线

图5 区域①处X=0的测量结果随时间变化曲线
区域①处X=0的测量结果随时间变化曲线,如图5所示。
传感器B内部温度与测量结果随时间变化曲线,如图6所示。

图6 传感器B内部温度与测量结果随时间变化曲线
图6中,7条测量结果随时间的变化曲线,分别代表传感器B在X∈[-12.5 mm,12.5 mm]范围内的7个测量点,覆盖X方向的整个测量范围。
区域②处X=0的测量结果随时间变化曲线,如图7所示。

图7 区域②处X=0的测量结果随时间变化曲线
根据测试结果可知:
(1)不同传感器开机后,内部温度变化存在差异,测量结果变化与内部温度变化呈正相关趋势。传感器内部温度达到稳定状态需要约1 h,测量结果同样达到稳定状态,且变化量保持在3 μm内;
(2)传感器A开机15 min内的测量结果变化近似线性,传感器B开机40 min内的测量结果变化近似抛物线。可根据测量需求,对传感器内部温升导致的测量结果变化误差进行补偿,以提高传感器的测量精度;
(3)从开机至达到稳定状态,传感器A的测量结果变化量约为30 μm,传感器B的测量结果变化量约为12 μm,如果进行毫米级或更低精度要求的测量工作,传感器开机不经预热即可进行测量;
(4)图(5,7)中,传感器内部温度处于上升阶段时,1 min内传感器测量结果变化量在3 μm内,与稳态时的变化量一致。如需进行短时间的快速测量工作,传感器开机不经预热即可开始测量;在进行长时间位置测量或动态测量工作时,必须等传感器内部温度稳定后再开始测量。
4.2 传感器测量区域位置的影响
线结构光传感器的有效测量区域是一个整体范围,但由于传感器的本身特性,测量区域内不同位置的稳定性存在差异,并对测量精度产生影响。
笔者保持传感器参数设置及测试环境不变,且传感器充分预热,将量块工作面作为被测面置于传感器的测量区域内,等步长(该研究为1 mm)由远端视场向近端视场移动,并记录每个位置的测量值;把激光干涉仪作为长度基准进行同步测量,并记录其结果。
计算每个位置的宽度X方向上每一个“激光点”测量数据的标准偏差,以此衡量传感器测量区域内不同位置的稳定性。
测量区域位置影响的测试结果,如图8所示。

图8 测量区域位置影响的测试结果
根据测试结果可知:
(1)线结构光传感器测量区域内不同位置的测量稳定性存在差异,X方向上中间区域稳定性优于两端;
(2)不同传感器的测量稳定区域也有所不同。传感器A在Z轴方向基准距离附近区域的测量稳定性优于边缘区域,如图8(a)中区域①所示;传感器B在Z轴方向基准距离处至近端视场间的中部区域稳定性较好,如图8(b)中区域②所示;
(3)针对不同的测量需求可选择与之相应的最佳测量位置。以传感器B为例,如果测量要求不高(标准差大于3.5 μm),可在全测量范围内进行测量;如需高精度测量,则需要根据不同测量要求选择阈值,图8(b)中区域②即为标准差阈值小于1 μm的测量区域。
4.3 传感器曝光时间的影响
曝光时间决定了光源和光电探测器持续开启时间,会影响传感器的感光量。曝光时间过短,会导致测量结果丢失数据点;曝光时间过长,有助于线结构光传感器侦测黑暗中或远处测量物体上的光线,但会导致过度吸收环境干扰光。
笔者保持测试环境不变,且传感器充分预热,将量块工作面作为被测面置于Z轴方向的基准距离处,分别在正常曝光、过曝光、欠曝光这3种参数设置下进行测量。
曝光时间影响的测试结果如图9所示。

图9 曝光时间影响的测试结果
根据测试结果可知:
(1)在正常曝光情况下,传感器A和B的测量轮廓清晰,获得可靠的测量结果;
(2)在过曝光情况下,传感器A吸收过多环境背景光,而传感器B的测量轮廓在X=0附近数据点剧烈波动,影响测量结果;
(3)在欠曝光情况下,传感器A和B的测量轮廓丢失大量有效数据点,测量结果不可靠;
(4)在实际测量前,需要根据回光情况将传感器的曝光时间调整到合适参数,传感器的感光量在50%左右时可满足测量需求。
4.4 测量物体性质的影响
笔者为了测试,加工制造了钢、铜、铝、黑色塑料、白色塑料这5种不同材料的测试样条,如图10所示。

图10 不同材料测试样条
笔者保持测试环境不变,且对传感器充分预热,将5种测试样条分别置于传感器的有效测量区域内,调整传感器的参数设置,以得到测量的轮廓。
测量物体性质影响的测试结果中,传感器A测量物体性质影响的测试结果,如图11所示。

图11 传感器A测量物体性质影响的测试结果
传感器B测量物体性质影响的测试结果,如图12所示。

图12 传感器B测量物体性质影响的测试结果
根据测试结果可知:
(1)图11(a~c)和图12(a~c)中,在合适的参数设置下,采用线结构光传感器测量钢、铜、铝此类金属材料物体,可以得到稳定清晰的轮廓,测量结果可靠;
(2)采用线结构光传感器测量黑色塑料物体,同样能得到可靠结果,但由于白色塑料物体的强透光性,光电探测器不能接收到足够的反射光量,无法得到白色塑料物体的清晰轮廓。因此,线结构光传感器不适用于强透光性物体的测量;
(3)测量强透光性的物体时,需要使用其他测量方法,或在不影响表面形状的前提下,在测量物体表面覆盖不透光材料。
4.5 环境光强的影响
笔者保持传感器参数设置及测试环境不变,且对传感器进行充分预热,将量块工作面作为被测面,置于传感器Z轴方向的基准距离处。
笔者分别在正常环境光下、光照强度1万勒克斯环境光下、光照强度5万勒克斯环境光下,对线结构光传感器进行测试,照度计检测结果如图13所示。

图13 照度计检测结果
首先,笔者将传感器置于正常环境光下进行测量,得到测量结果;之后,模拟强光环境,调整光源强度,将强光分别对准线结构光传感器的激光接收透镜、激光发射口、被测面进行测试。
环境光强影响的测试过程如图14所示。

图14 环境光强影响的测试过程
不同环境光强下,传感器对量块的测量结果标准差对比中,传感器A环境光强影响的测试结果,如图15所示。

图15 传感器A环境光强影响的测试结果
传感器B环境光强影响的测试结果,如图16所示。

图16 传感器B环境光强影响的测试结果
根据测试结果可知:
对比不同环境光强下传感器测量结果的标准差,线结构光传感器在强光环境下和正常环境光下测量结果的稳定性一致;正常环境光下的光照强度低于150勒克斯,该次测试模拟的强光环境最高光照强度为5万勒克斯,已经大幅超过传感器测量时环境光可能达到的强度。
因此,不同环境光强对测量精度的影响可忽略,线结构光传感器可在一定的强光环境下进行稳定测量。
5 结束语
为了揭示线结构光传感器在各种因素影响下的测量特性,笔者设计了一种测试平台,研究了传感器的内部因素(内部温度、测量区域位置、曝光时间)和外部因素(测量物体的性质、环境光强)对传感器测量特性的影响;通过分析获得了不同因素对线结构光传感器测量特性的影响情况。
研究结论如下:
(1)线结构光传感器开机后测量结果变化与内部温度变化呈正相关趋势,从开机至达到稳定状态期间测量结果变化呈一定规律,可通过误差补偿提高测量精度;
(2)线结构光传感器有效测量区域内X方向中部区域的稳定性优于边缘区域,应根据测量需求选择最佳测量位置;
(3)曝光时间决定了测量结果的可靠性,需要根据不同的测量物体表面回光强度来调整合适的传感器曝光时间;
(4)线结构光传感器测量钢、铜、铝等金属材料物体以及黑色塑料物体时,测量轮廓结果稳定可靠,但是不能稳定测量强透光性物体;
(5)不同环境光强对测量精度的影响可忽略,线结构光传感器可在一定的强光环境下进行稳定测量。
下一步,笔者将使用线结构光传感器对物体表面进行多角度测量,研究激光散射等因素对传感器测量特性的影响情况。
