直流道消防炮的开发设计与实验
2022-12-20刘平安
方 菲,刘平安
(1. 吉林省畜牧业学校,吉林 白城 137000; 2. 南昌职业大学,江西 南昌 330009)
消防炮是通过赋予喷管内的灭火介质(如水、泡沫或气雾)一定动能以获得一定初速度,使其喷射至着火点,以达到灭火效果的常用消防装置。 由于它能远距离作业,使消防人员免受热辐射、有毒浓烟、甚至爆炸的危害,且具有操作简单、安全、灭火效率较高、威力大的优势,在移动消防车、消防船或可能发生严重火灾场所,如石化车间、码头、仓库等场合得到广泛运用[1-3]。 为了使喷头能对准灭火目标或在一定范围内扫射, 通常需要两个转动自由度,即竖直面内和水平面内的往复摆动。 同时为了操作人员能安全并高效完成灭火任务,还对射程(喷射距离)和扬程有一定要求,这对于目前高楼林立的城市消防显得尤为重要。 射程和扬程主要取决于介质喷出时的压力、流量,以及喷嘴形状和尺寸[4-5],工作环境如风力风向等因素。 在环境和媒介输入压力一定的条件下,媒介流经炮管的压力损失决定了其出口压力,所以减少炮内流道压力损失是提高消防炮工作效率、减少能耗的有效途径。 目前国内外普遍采用的消防炮如图1 所示[6-8],炮体由若干节管道通过串联方式连接,利用人工(或电机)驱动,经蜗轮蜗杆传动实现炮管在上下和水平两个面内的摆动。

图1 传统串联消防炮Fig.1 Traditional fire monitor
这种串接结构型式的消防炮由于流道存在直角弯曲,对流体动能形成较大损耗即水头损失(单位重量的能量损耗,用长度单位m 表示),直接影响了射程或扬程,降低了灭火效率,导致消防炮性能和适用范围受到了一定限制。
首先根据流体动力学理论,分析比较两种消防炮的管流水头损失情况;然后利用混联机构代替串联结构,用直型流道代替弯曲流道,实现消防炮炮管的两个自由度运动,机构设计包含选型,尺寸优化和整体结构设计;最后制作出样机并经过性能测试,验证其有效性。
1 消防炮流道水头损失的流体动力学基础
根据流体动力学理论[9],消防介质流经流道时的总水头损失hw主要由流经直管时的沿程水头损失hf和流经弯头的局部水头损失hl的总和。

按照圆管湍流计算理论,直管沿程水头损失hf和直角圆弧过渡管流局部损失hl分别为
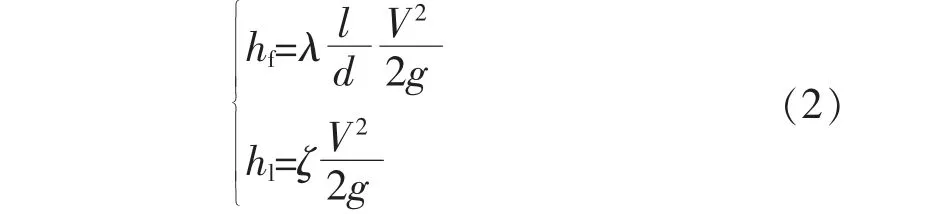
式中:λ=64/Re 为沿程损失系数,Re 为流体雷诺数;l为直管段长度,m;d 为管径,m;V 为流断面平均速度,m/s;g 为重力加速度,m/s2;ζ 为局部损失系数,对于直角圆弧过渡管道,且圆弧半径等于管径的管道有ζ=0.29。
假定弯曲流道各直管段总长度等于直管流道长度(一般前者比后者要大一些),且材料、工艺和表面质量,以及直径等尺寸均相同,则如图1 所示单个直角圆弧过渡的流道与直型流道的总水头损失之比为

式中:取ζ=0.29;平均流速V=5 m/s;水的动力黏度μ=10-6m2/s;d=35 mm;L=360 mm。 则Re=ρVd/μ=175 000,λ=64/Re=0.000 365 7,代入式(3)得η=79.3。
对于如图1 所示有4 个直角圆弧过渡的弯曲流道的串联炮,因为弯曲造成的水头损失将比直管炮增加水头损失约320 倍。而且随着流速加大,η 值越大,损失越大。
为了解决现有串联消防炮弯曲流道带来的能量损失,本文摒弃传统串联机构,改用其它机构型式,设计出直管流道消防炮,降低流道能耗,以提高射程和扬程,从而达到提高灭火效率的目的。
2 机构选型
传统消防炮采用串联机构,通过蜗轮蜗杆实现水平和竖直两个方向的摆动, 形成多个直角弯道,增大了消防介质流经流道的压力损失和湍流强度。将直管流道代替弯管流道后,可以选用其它型式机构来满足消防炮运动要求[10-14]。 从机构型式方面考虑,实现两个转动自由度可以通过串联、并联或串并联即混联机构来实现水平摆动和上下俯仰动作。虽然两转动自由度并联机构型式[12-15]不少,但因为运动耦合,设计和分析较复杂,工作空间小,运动灵活性欠佳,控制也比较困难等不足,经过比较筛选,最后选用平面四杆机构与摆杆机构组合实现炮管平台上下摆动,再在平台与炮管之间通过回转副连接实现炮头摆动的混联传动方式,如图2 所示两自由度机构运动简图。图2 中摇杆DC 为摆动平台,在其上通过一个转动副连接炮管,实现在平台上往复摆动。

图2 两自由度机构Fig.2 2-DOF mechanism
3 机构设计
3.1 运动分析
如图2 所示,将平台CD 与机架相连,通过原动件AB 的摆动驱动其作上下俯仰运动, 可选用双摇杆机构完成。
按典型口径为65 mm 消防炮设计该机构,具体设计要求如图3 所示。 CD 杆的摆动角度满足要求为θ2=-15°~+60°, 并且在考虑人机工程等方面原因,可选定消防炮的整体高度为lAD,以及输出平台的长度为2 lCD。 求lAB和lBC的大小。
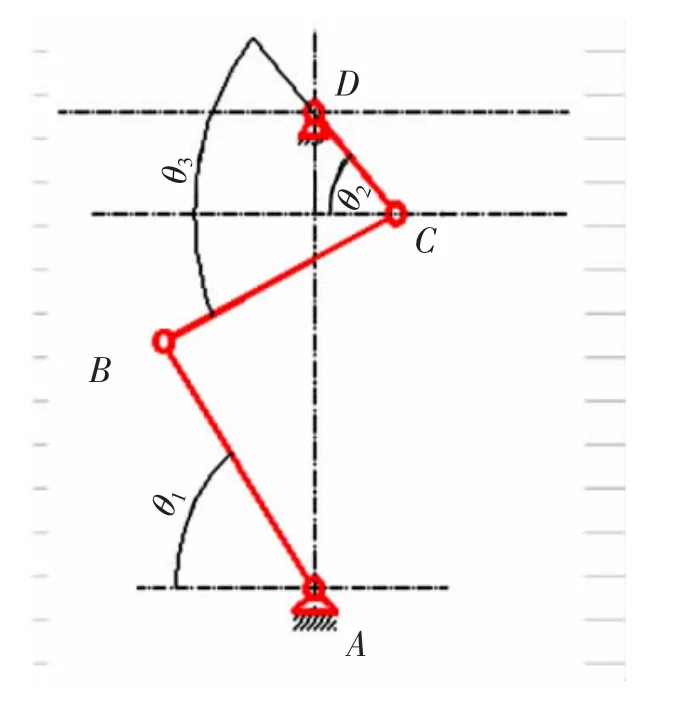
图3 四杆机构简图Fig.3 Schematic diagram of 4-bar linkage
由分析知: 由图3 中杆AB 的驱动可用摆杆机构实现。 譬如可通过蜗轮连续转动实现杆AB 的往复摆动。 考虑到蜗轮蜗杆的中心距和安装方便以及避免构件干涉,杆AB 的摆角θ1应尽可能大,以便于控制。 同时为确保机构具有良好的传动性能,使传动角θ3≥40°。 令

由图3 中几何关系有

令θ1=30°时,有θ2=60°,θ3=90°;θ1=90°时,有θ2=-10°,θ3=40°;分别代入式(5)中便可得到lAB和lBC的值。
3.2 四杆机构优化设计建模
机构优化设计就是为满足给定的运动学要求,在约束条件的限制范围内,按照某种设计准则即目标函数,改变设计变量,寻求最佳方案[15]。
对于俯仰机构, 在满足运动要求的情况下,以机构整体高度尺寸最小为目标函数,运动范围和实际工作要求为约束进行尺寸优化。这里就是要求lAD的最小值,由图3 中的几何关系和式(4)可直接写出目标函数和约束条件如下

以上优化模型属于单目标多约束优化问题,采用工程计算软件Matlab[16]的优化设计工具箱很容易求得满足要求的解。
3.3 设计实例
初选lAD=490 mm,lCD=145 mm,由式(5)得lAB=254 mm,lBC=351 mm,为双摇杆机构。 根据式(5)和式(6)利用Matlab 最大最小逼近函数,可得如图4所示优化结果。
如图4 所示,横坐标为迭代次数,纵坐标为每次迭代求出的值。 由图中可以看出经过50 次迭代后, 结果趋于收敛。 得到消防炮最低高度为348 mm。

图4 最小值Fig.4 Minimum value
同样可以利用该优化工具箱求出lAD在约束条件下的最大值,经过近80 次迭代后lAD收敛于633 mm。
由以上优化结果知:lAD的取值为348~633 mm;综合考虑安装和操作方面等因素可取lAD=500 mm。 将lAD和lCD的值代入式(5)中得到四杆机构尺寸:lAB=276 mm,lBC=272 mm,lCD=145,lAD=500 mm。
3.4 摆动机构的设计
为了简化结构, 用滚子代替滑块在摆杆AB 槽中滑动实现将蜗轮的整周转动变换为摆杆的往复摆动,如图5 所示。

图5 从整周转动到往复摆动的变换Fig.5 Transformation from revolution to rock
如图6 所示,杆CD 的两个极限位置C1D、C2D即为炮头俯仰的极限位置。不难找到B 的两个对应位置B1、B2,再作∠B1AB2的角平分线AE,则蜗轮的转动中心在线AE 上。
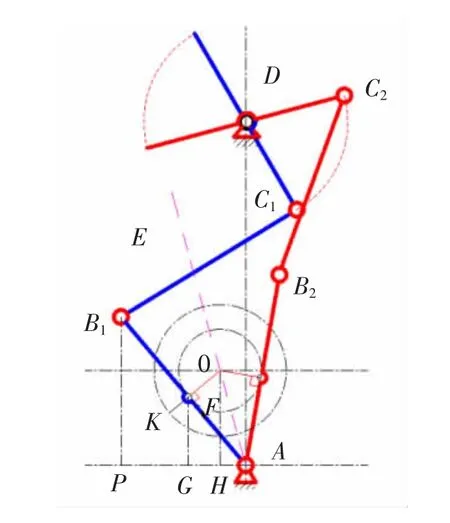
图6 摆杆机构设计Fig.6 Design of oscillating mechanism
如图6, 蜗轮上圆柱滚子中心距蜗轮中心设为R,显然要求式中df2为蜗轮齿根圆半径,mm。 蜗轮中心O 离摆动中心A 的距离式中:a 为蜗轮蜗杆中心距,mm;da1为蜗杆齿顶圆直径,mm。

为保障良好的受力性能,圆柱滚子在最低位置时离摆杆摆动中心A 点距离不能太小,要求

由式(9)选蜗轮蜗杆参数[10]。
将lAB=276 mm 及相关参数代入式(7)~式(9)中得摆动机构尺寸为

采用相同尺寸参数的蜗轮蜗杆传动实现炮管在平台CD 上的往复摆动。
4 样机制作与实验
4.1 样机制作
根据以上分析与计算,设计出的样机如图7 所示, 包含机械和控制两部分。 主要技术参数如表1所示。采用两个86 型混合式步进电机分别驱动上下两套蜗轮蜗杆传动机构,实现炮管的水平和俯仰摆动。

图7 基于混联结构的消防炮样机Fig.7 Prototype of fire monitor based on serial-parallel mechanism
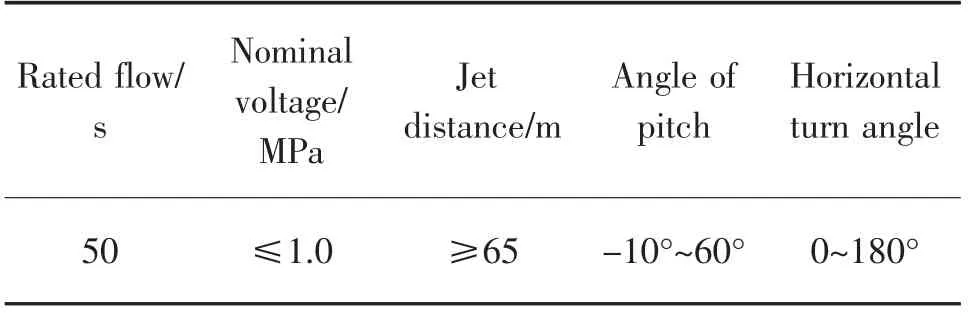
表1 消防炮设计参数Tab.1 Parameters of fire monitor design
4.2 控制系统
控制装置内置微控制器和驱动电路[17],具备手动和自动两种工作模式, 并可以扩展远程遥控模式,具有手动急停功能。选择220 V/48 V 10 A 开关电源,电源电流容量应不小于8.6 A,输出功率480 W。微控制器采用STC 工业控制芯片STC12C5A60,具备抗强电磁干扰特性,其工作原理如图8 所示。

图8 控制框图Fig.8 Control block diagram
控制装置上电后,由模式选择,在手动模式下,当摇杆上被检测压下,微型控制器将以一定频率发送脉冲并确定电机动作速度; 当摇杆下被检测,微控制器仍然发送该频率,但是方向值取反,以此类推,实现对上下、左右4 个方向的运动控制;当运行在自动模式下,电机自动运行,当碰触限位1、限位2 后实现自动反转, 从而实现往复运动; 当急停压下,电机脉冲被隔离,电机自动半流保持锁定,由于机械部分采用蜗轮蜗杆传动, 也具备机械自锁能力。
4.3 样机测试
喷射流体的轨迹和射程除受流体出口压力、口径和初速度等参数影响外, 还有工作环境如气温、气压、风向和风速等相关[18]。实验测试为在一定压力下的最远射程测试,并与传统弯管炮同等条件下的射程比较。 实验是在正常标准大气压和室外无风工作环境下进行的。 喷头出口直径为28 mm[5,19](喷管从进口到出口带有一定锥度), 仰角约为30°时在0.5~0.8 MPa 压力下的直管炮射程值s1,不同压力下直管炮与弯管炮射程比较如表2。

表2 不同压力下直管炮与弯管炮射程比较Tab.2 Comparison of jet distances of novel fire monitor to traditional one with different pressure
通过实验发现,在压力较小时其射程增量并不明显,随着压力增加其增量也越来越大,到0.8 MPa时,与某企业提供的弯管炮射程s2相比较,其射程增量已接近12%,故通过样机实验可知与传统炮射程比较具有明显的优势。
5 结论
1)通过蜗轮蜗杆驱动摆杆机构,经摆杆驱动双摇杆机构,并在输出摇杆上串联一个转动副的混合机构方式,实现喷管的两个垂直平面内的转动,从而达到用直管流道代替弯管流道的目的的消防炮,可有效减小水头损失,减少能耗,增大射程,提高灭火效率。
2) 从直管和弯管消防炮流道水头损失比较分析入手,设计了满足消防炮运动要求的新型消防炮机构,包括俯仰机构尺寸优化与结构设计,用滚子与摆杆上槽的高副接触代替摆动导杆机构的摆块,从而简化了结构。 最后制作出了样机,并经现场性能测试,设计达到了预期目标。