基于粒子滤波的IMU/UWB组域内自主导航定位研究*
2022-12-10贺竹川路永乐文丹丹邹新海
刘 宇,贺竹川,路永乐,邸 克,文丹丹,邹新海
(重庆邮电大学 智能传感技术与微系统重庆市高校工程研究中心,重庆 400065)
0 引 言
现代科学技术的发展,导航定位技术已经在社会的很多领域得到应用[1],对室内外导航定位的需求也越来越多。目前,现行室外定位技术主要凭借全球定位系统(global positioning system,GPS)以及中国北斗卫星导航系统(BeiDou navigation satellite system,BDS)进行定位,其定位精度能达到亚米级[2]。由于卫星定位只适用于空旷无遮挡地带,在信号干扰源多、环境复杂多变的室内卫星信号的强度和质量急速下降,导致定位精度下降甚至无法完成定位。因此,工业界和科学界均在探求精度更高,可靠性更强的室内定位技术。
目前,利用单一惯性测量单元(inertial measurement unit,IMU)设备对多个移动节点组成的班组进行室内定位时,整个班组的整体性导航定位误差会随着时间的增长而累计,不适合于长时间的室内定位导航[3,4]。超宽带(ultra-wideband,UWB)定位能够达到较高精度,但由于需要提前搭设参考基站,在遇到突发状况时使用局限性较大,且UWB基站成本高,定位精度容易受到非视距(non line of sight,NLOS)噪声的干扰[5]。
Tong H B[6]、陈隆亮等人[7]均利用UWB和IMU松耦合进行组合定位,将IMU和UWB分别定位结果进行融合滤波,该方法需要设置UWB定位基站,定位效率不高。Olsson F等人[8]提出了选择以IMU为核心的基础上,将UWB测距数据作为位置观测值,加入到基于零速度的扩展卡尔曼滤波(EKF)算法中实现融合。然而,EKF本质上是观测方程的线性逼近,基于高度非线性的观测模型很难对UWB传感器实现很好的逼近。相比之下,当许多粒子分布在状态空间近似于状态概率分布时,粒子滤波可以解决大量的非线性或非高斯问题[9,10]。
本文选用粒子滤波算法将IMU测量数据以及UWB测距信息进行融合。将IMU数据作为粒子滤波的先验信息,并将UWB测距值作为粒子的观测值,对节点位置信息进行预测、更新,提高导航定位的精度。经实验证明,在利用粒子滤波融合的IMU和UWB室内定位系统的定位精度,相较于单一IMU惯性导航的定位精度明显提高。
1 IMU导航与UWB测距模型
1.1 IMU导航模型
IMU是测量物体运动的三轴角速度和三轴加速度的单元。本文将采用行人航迹推算(pedestrian dead reckoning,PDR)算法对IMU采集的移动节点的三轴角速度和三轴加速度进行解算[11]。采集无其他参考设备的环境下佩戴IMU运动人员在行进过程中的加速度、角速度等数据,并利用这些数据对行进人员进行步长与方向的推算,得到移动节点的坐标以及方位,从而达到对人员进行定位跟踪的目的,其中,主要涉及的过程有,步态检测、步长和方向计算。图1所示为PDR算法示意。
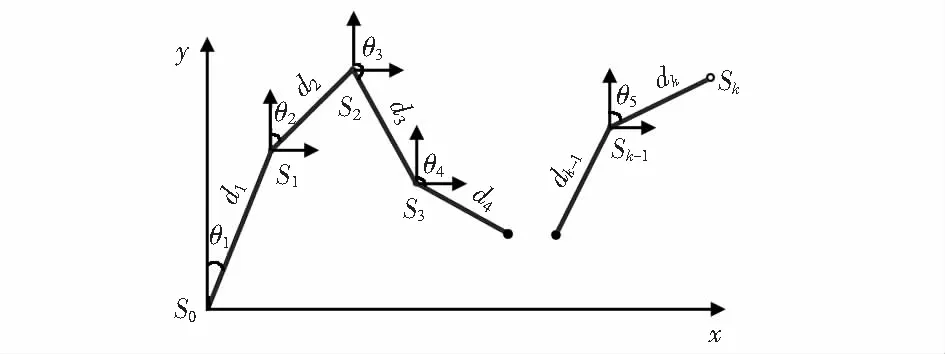
图1 PDR算法示意
PDR初始条件:已知初始位置S0(X0,Y0),由IMU中内置的加速度计对行人的步态进行检测,再由陀螺仪对行人角度进行实时监测,从而利用下列公式对路径进行推算
(1)
根据以上PDR推算公式,可以得出任意时刻k的位置Sk(Xk,Yk)。
1.2 UWB测距模型
UWB测距具有穿透力强、功耗低、抗多径能力强,安全性能高等优势。本文UWB测距将采用双向飞行时间法(two way time of flight,TW-TOF)来完成。主要两个异步收发机(transceiver)之间的信号飞行时间来测距。每个收发机启动时会生成一条独立的时间戳。如图2所示,模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B接收机在其时间戳Tb1接收到该信号。模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收。由此可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离S
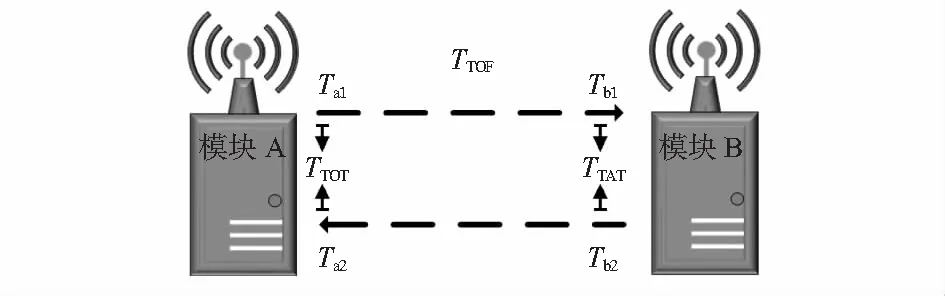
图2 UWB测距原理
S=c[(Ta2-Ta1)-(Tb2-Tb1)]/2
(2)
将发送端发出的数据包和接收回应的时间间隔记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可以简化为
TTOF=c(TTOT-TTAT)/2
(3)
2 UWB/IMU协同导航定位模型
2.1 协同导航定位模型建立
IMU对短期内位置变化的估计很准确,但对于长航时的误差累积非常敏感。特别是移动的节点来说,不规则运动对其影响很大。因此,利用UWB的测距数据来补偿IMU的误差,从而产生一种新的、更准确、更可靠的室内班组自主导航定位系统。
在该组合导航模型当中,将每个节点自身携带的IMU测量惯性数据作为系统的状态量,当每个移动节点接收到IMU数据,则使用状态转移方程更新当前系统状态。当接收到班组区域内各节点之间的UWB测距数据,则使用该测距数据作为观测值,将两者融入一个概率框架之中,得到当前位置的联合后验概率分布,并根据IMU的信息对粒子进行更新后输出状态估计。最后,通过重新采样来缓解粒子衰减的问题。其融合算法示意如图3所示。
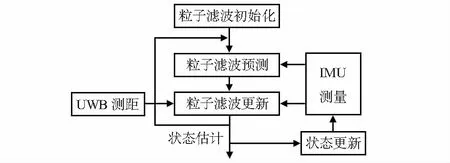
图3 传感器粒子滤波融合算法示意
2.2 粒子滤波融合算法


(4)
(5)
(6)
(7)

(8)
(9)
式中d(·)为节点i和节点j之间距离的平方根。在本文模型中,粒子滤波的步骤为三部分组成。
(10)
重采样:当有效的样本大小低于粒子数M的50%时,将生成一组新的粒子来替代之前的旧粒子样本集。
根据仿真验证,在粒子数为500时,系统的运行时间较低,定位产生的误差也较低,综合性能最优。所以,本文试验将粒子数M设定为500。
3 实验验证与结果分析
基于上述理论,为验证该方法的合理性及其定位精度,设计了UWB和IMU相结合与单一IMU相对比的实验方案。如图4所示,用到的IMU设备为实验室自行研制的IMU设备,UWB模块选用Time Domain公司的PulsOn440。本文实验场地选取重庆邮电大学室内体育馆中心较复杂的室内环境,实验的行走范围设定为50 m×60 m的矩形路径,实验由3名人员分别佩戴导航定位设备在室内行走。实验人员将IMU设备固定于腰间,为了避免人体对UWB信号产生遮挡,将UWB设备固定于头部。实验一共分为2组,每组实验围绕该矩形路径行走2圈,3名移动人员在起点处相隔1 m出发,并在实验过程中保持该距离行走。

图4 IMU和UWB组合导航定位系统
第一组实验由3名移动人员组成移动班组佩戴IMU设备从相同起始点出发,移动人员的定位信息由采样频率为50 Hz的IMU进行采集,并用PDR算法进行解算,得到IMU导航定位结果。
第二组实验由3名移动人员组成班组佩戴IMU和UWB导航定位设备从相同的起始点出发,其中,UWB的定位信息由串口相连接的IMU内设CPU进行采集,然后用粒子滤波算法进行融合滤波,得到融合定位导航结果。图5和图6分别为IMU定位和IMU/UWB组合定位实际轨迹图。对比可以得到,仅使用IMU进行导航定位的方案,受到IMU的累积误差以及航向角偏差的的影响,整个小组行进的路线与真实路线偏差较大,在行进途中各人员虽然保持同步,但轨迹却很快的发散,相互偏离。而由IMU/UWB组合的导航系统则与真实路线更加接近,人员轨迹基本保持同步。

图5 单IMU惯性导航定位效果
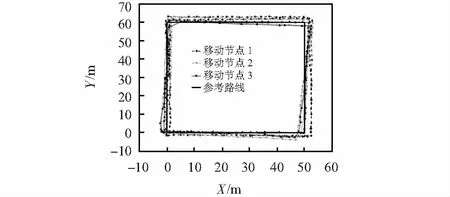
图6 IMU与UWB融合导航定位效果
由图7和图8得到,在仅用IMU导航的情况下,受累积影响,3个移动节点随着行走时间累计,单个节点以及班组的整体误差不断在增加,实验过程中单个节点在X和Y轴上的最大偏差可达到11.8 m和10.7 m,班组整体的组合轨迹偏差最大可达到6.4 m和6.3 m,整体路径偏离真实路径较大。而在添加了UWB测距量进行修正后,班组的整体组合轨迹重合度增大,单个节点和班组整体在X和Y轴上的最大偏差均小于2.1 m,轨迹的偏差明显降低。
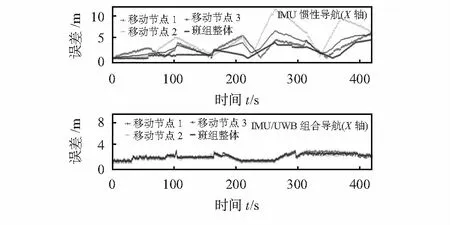
图7 不同导航定位系统在X轴向的误差曲线
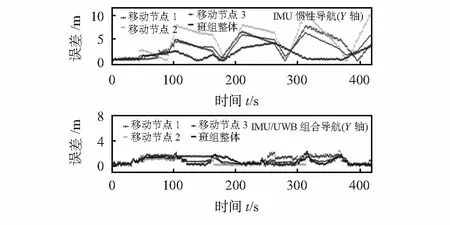
图8 不同导航定位系统在Y轴向的误差曲线
由表1可知,在单一IMU导航的情况下,在X轴向上,3个移动节点组成的班组区域在行走期间的平均累积误差为2.78 m,Y轴向上为3.08 m。在结合UWB后,班组区域平均累积误差在X轴上缩小为1.07 m,在Y轴向上缩小为1 m。误差较单一IMU惯性导航减小了61.5 %和67.5 %,有效地提高了班组的整体导航定位的精度。
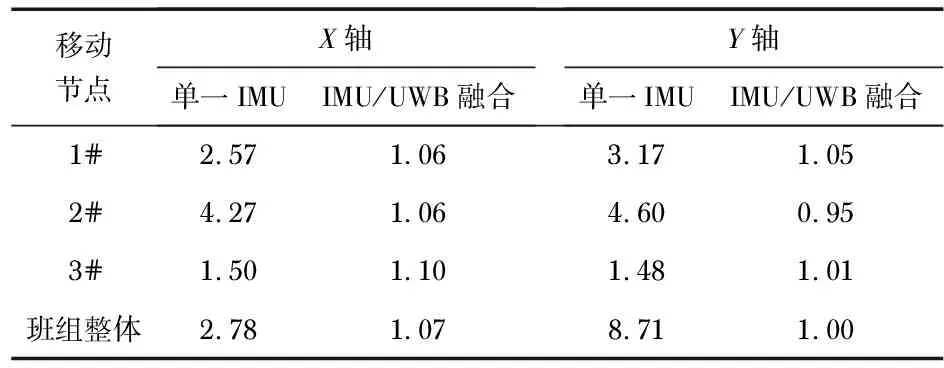
表1 X轴和Y轴方向上不同系统的平均误差 m
4 结 论
单一IMU惯性导航的长航时累积误差会导致定位偏差,本文提出的无需外界辅助信号源,将IMU惯性信息和班组区域内的UWB测距信息结合导航定位的方法,相对单一IMU惯性导航,增加了精确的距离观测值,利用粒子滤波将2种数据进行融合,以提高导航定位的精度。通过实验验证,将IMU和UWB结合的方案与单一器件的定位误差相比在X轴和Y轴上各自降低61.5 %和67.5 %,班组实际行走轨迹与参考轨迹重合,导航定位精度得到明显的提升。
