基于密度–距离空间的红外引信抗噪声方法研究
2022-12-09张骢权康男岳明凯韩自强
张骢,权康男,岳明凯,韩自强
(沈阳理工大学 装备工程学院,沈阳 110159)
战场中环境的复杂多变严重影响了红外引信的环境适应性,尤其是烟雾弹、曳光弹、地面干扰设施等人工干扰[1],使红外图像的背景更为复杂,引信的红外成像质量变得更差。因此,对红外目标识别并进行抗干扰分析成为了提高红外引信环境适应能力的关键。
在一般红外目标检测方法中,无论是滤波法、局部对比法,还是肉眼观测法,都是对图像全局中的每一个像素点进行检测。在这几种检测方式中,倘若检测目标同时存在于灰度平坦区域和杂波区域,检测小目标的效果就会大打折扣,相应的运算处理时长也会增加,同时也就降低了检测的效率。由于以上都需要一定的阈值或先验条件,以上缺陷都无法应用于需要自主检测目标的红外引信当中。
在复杂的红外环境中,红外引信需要从干扰成像的过程中逐渐分离出打击目标的状态,直到目标呈现出外观特征,通过对红外图像进行处理,实现精确打击。在红外探测引信开始工作并顺利探测到目标时,由于目标距离较远,在图像中只有几个像素组成,所以极易受噪声干扰。因此,如何对红外图像进行适当处理,充分挖掘可利用信息,增强目标可识别性、减少或滤除杂波干扰是当前亟待解决的难题[2]。
当前,红外小目标检测主要分为3 类,基于滤波的方法、基于局部对比方法和人类视觉方法[3]。其中,基于滤波的方法可以从滤波后的图像中提取出红外目标,也就是通过原始图像与已去除杂波的滤波图像之间的差异来获得目标信息[4]。典型的滤波方法有顶帽(Top-Hat)、中值滤波[5]、高斯滤波、双边滤波等。Zhang 等[6]提出了一种基于中值滤波的局部差分对比方法。Huang 等[7]提出了一种基于灰度区域生长的形态学滤波方法来抑制杂波从而检测红外目标,即通过选取适当的种子与阈值进行区域增长来排除如建筑、云天等背景杂波。
与滤波方法不同的是,基于局部对比的方法直接作用于目标本身,大多数都是在对比度机制上检测目标,这是由于局部区域中红外小目标的灰度值通常高于其邻域的灰度值[8-9]。例如,Li 等[10]提出了一种基于生物启发的多尺度对比度测量方法(MPCM),用来增加目标和背景之间的对比度。Zhu 等[11]提出了一种加权对比度的方法,利用边缘、目标的局部对比度和图像背景的一致性来检测红外弱小目标。这些基于目标的方法提高了目标检测的准确性,但需要逐个像素地进行循环计算,极大地增加了运算时间,不能满足引信的高实时性要求。
近年来,人类视觉系统(HVS)逐渐成为主要的研究重点[12],特别是卷积神经网络(Convolutional Neural Network,CNN)[13-14]已经被国内外广泛地应用于图像和连续视频中的目标检测和识别领域。其派生的方法包括Fast-RCNN[15-16]、Faster-RCNN[17-19]、SSD[20-21]、YOLO[22-24]等,为目标检测开辟了一条新的途径,可以有效地提高目标的检测精度。这些算法都需要大量的数据集进行训练以获得模型参数,并不适用于缺乏引信红外复杂背景噪声数据集条件下的目标检测任务。
本文主要提出一种在复杂背景下对红外图像进行降噪处理,并检测到真实目标的方法,从而增强红外引信的抗干扰性。算法既要考虑到不同的背景区域对不同尺寸目标检测精度的影响,也要兼顾计算时间。因此,本文通过一种新的基于密度–距离空间的方法,通过最大限度地利用图像中的有限信息,构建一个二维的密度–距离空间,来从红外图像中获得多个候选目标。然后,通过像素生长的方法,排除多类型杂波的影响,从候选目标中检测出真实目标。最后,通过仿真实验,验证了算法的抗噪能力。
1 算法总体设计
1.1 红外环境噪声分析
在引信工作时,获取的红外图像背景可以大致分成2 种:灰度平缓的区域和存在杂波的区域。通常引信获取的红外图像大部分都是灰度平缓区域,当目标存在于此区域时,可以通过简单的特征提取算法检测到目标,并抑制周围背景,就可以获得很好的小目标检测效果,检测速度也较快。当目标处于杂波区域时,一般的特征提取算法就很难快速检测出噪声杂波和真实的红外小目标,检测效果较差,只有使用具有高甄别能力的复杂算法才能滤除或降低噪声干扰,从而获得较好的检测精度[25]。同样,由于采用了复杂算法,程序运行时间增加,检测时间较长。因此,要满足红外引信在极短的检测时长中快速准确地识别真实目标,需要对算法进行改进,来保证检测的准确性与实时性。
由此,红外目标检测算法应具备自适应多目标检测能力和算法的实时性[26]。从肉眼观测角度分析,在红外图像在含有被观测小目标时,其小目标在红外图像上呈现出与周围邻域明显不同的“高亮”。因此,红外图像中的小目标可以被归纳为2 个明显特征:存在局部灰度密度峰值以及与其他任何较高灰度值像素的距离最短,所以本算法可以通过这2 个特征来从红外图像中候选目标。
1.2 目标的密度和距离定义
首先,需要从红外探测器获取的图像中定义2 个主要参数,密度ρ和距离σ。然后,对图像中的所有像素进行分析,根据像素的不同属性,对像素进行赋值,从而把由像素组成的二维图像转化为由所有像素的参数值组成的二维ρ-σ空间。最后,可以设置阈值对所有像素的参数值进行区分,进而候选出多个目标,其中包括多个真实目标和虚假目标。
红外小目标通常具有灰度值高、像素数少、一定的对比度等特点。因此,红外小目标与周围邻近区域相比有更高的灰度值。倘若将灰度值等价于质量,把像素数等价于体积,那么图像中每个像素点的密度也就代表了它与邻域像素间的差别,计算密度的定义如式(1)所示。

式中:ρ(i,j)表示(i,j)位置处的像素点密度;G(i,j)代表(i,j)位置像素点的灰度值;n表示ε邻域包含的像素数。从式(1)可以看出,密度值代表了被测像素与其邻域像素的平均灰度特征,算法需要将具有最大密度特征的像素作为候选目标,由于仅仅将这一个像素作为候选目标的位置,因此得出的检测结果不受尺寸与形状变化影响。
根据上文分析,本文将像素的距离参数用σ表示。σi定义为像素与比其密度值高的其他像素之间的最小距离。计算方式如公式(2)和(3)所示。

式中:dij表示像素i和像素j之间的欧氏距离;x和y是像素的坐标值。另外,当某一个像素具有整幅红外图像中最高的密度特征值时,σ应当是所有距离中最大的值。
1.3 基于区域像素生长的真实目标检测
通过密度–距离空间方法对红外图像进行初步处理,解决了在灰度平坦区域中候选红外目标的检测任务,接着需要解决的是将真实目标从候选目标中检测出来。当红外图像中包含大量杂波区域或者被测像素处于图像边缘时,都同样存在密度峰值,这些干扰因素与真实目标通常很难甄别,因此在目标检测中应首先对红外图像进行滤波处理。
传统区域生长法是首先将图像进行区域分割处理,将分割区域中的像素按照其特性进行归类集合,从而构成一个候选区域。首先从区域中挑选出一个类似于“种子”的像素点作为生长源,接着从种子的邻域开始,通过某种判定准则将具有相同或相似性质的像素点逐渐集合起来。这些新获得的像素点又作为新的种子点继续生长,直到后续的像素点不满足判定准则为止。由此方法可以剔除掉其余的杂波,将种子的生长区域作为目标区域。因此,目标区域是由种子点的选取、生长准则(判定条件)和中止条件3 种条件共同约束形成的。具体步骤如下:
1)分析图像中的所有像素,选取1 个像素点作为种子点,并将该种子点的位置定义为P(x0,y0)。
2)将种子点作为生长的起点,首先对种子点P(x0,y0)的8 个邻域像素进行判定条件分析,如果邻域像素内存在1 个或多个P(xi,yj)符合种子生长准则,则将P(xi,yj)与P(x0,y0)合并到1 个区域内,并将所有符合条件的P(xi,yj)都作为新的种子。
3)将新的种子作为像素起点,按照步骤2)的方式继续生长。
4)将新的种子集合定义为{ϕ}。
5)重复步骤1)—4),直到图像分析完图像中所有的像素点为止。图1 展示了种子的区域生长方式。
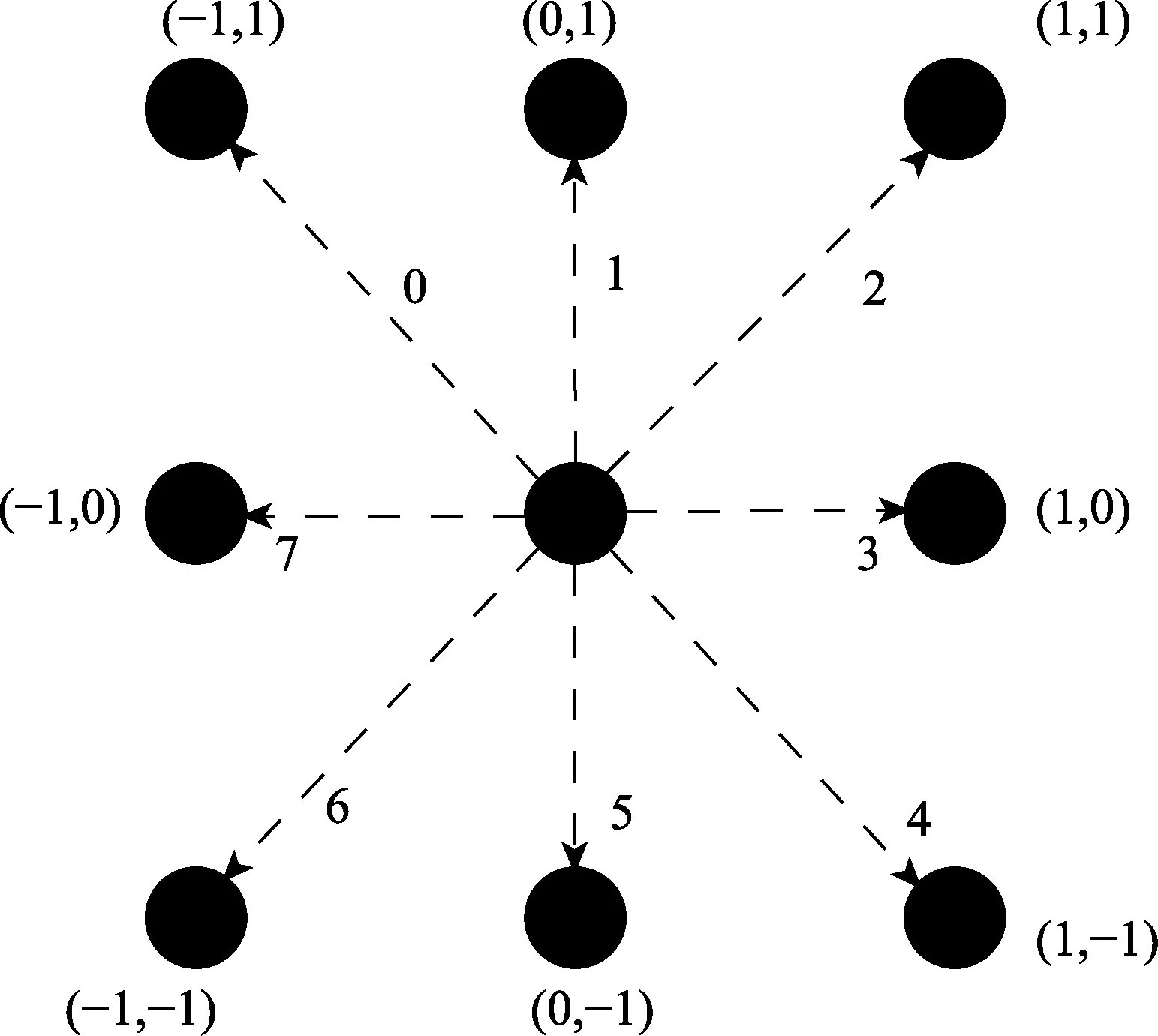
图1 区域生长滤波方法Fig.1 Regional growth filtering method
通过区域生长法可以有效地对全图噪声进行滤除,从而获得候选的目标区域,但同样也存在一些不足。首先,在种子的选取时,需要对全局的所有像素进行扫描分析,这种方法极大增加了运算处理时长,并且由于种子点的选取直接影响了候选目标,所以种子点选取的准确率至关重要。其次,由于区域生长法的生长准则需要预先设定,并且在运算过程中无法改变,所以当面对较为复杂的杂波噪声时,无法做到自适应。因此,该方法不适用于红外引信的自主目标检测功能。
1.4 自适应像素生长
根据区域生长的滤波思想,本文提出一种能够进行自适应检测的像素生长方法。在通过密度–距离空间方法生成候选目标后,直接将所有的候选目标当成种子点,然后通过自适应阈值方式设置生长条件,克服了传统区域生长法的缺陷,使之能够适用于引信红外成像背景。
将种子点用Tk(x,y)表示,其中k是候选目标的数量,(x,y)是种子点的坐标。种子按照8 邻域的方向生长,生长条件则取决于种子与其相邻像素的灰度差异。当灰度差异小于阈值时,种子将完成生长步骤,否则将停止生长。阈值表达式如(4)、(5)所示。

通过大量的实验测试得出,像素的生长方式与区域生长方式相同。当种子的生长不能达到阈值Th的要求或者达到图像边界时,生长停止。每一个种子生长后得出的区域面积成为Sk。根据光电仪器工程师协会的规定,红外小目标上的像素数通常在80 个以内。因此,在确定了目标的尺寸限制之后,种子的生长可以根据其周围的像素灰度值自适应。
自适应像素生长方法的具体过程如图2 所示,其中种子点用浅色圆圈表示,周围的邻域像素点用深色圆圈表示,虚线框表示每一步生长之后的范围。首先,假设在种子T1(x,y)周围有3 个像素满足阈值要求,分别为P1'(x+1,y+1)、P1''(x,y-1)、P1'''(x-1,y)。第1 步之后,添加了标记为2 号的3 个新种子。同样,在经过第2 步生长之后,新的种子标记为3 号。经过2步生长之后,区域的面积1 为10 个像素。然后按照面积从小到大将所有种子排序,从而得出真实目标的位置和数量。
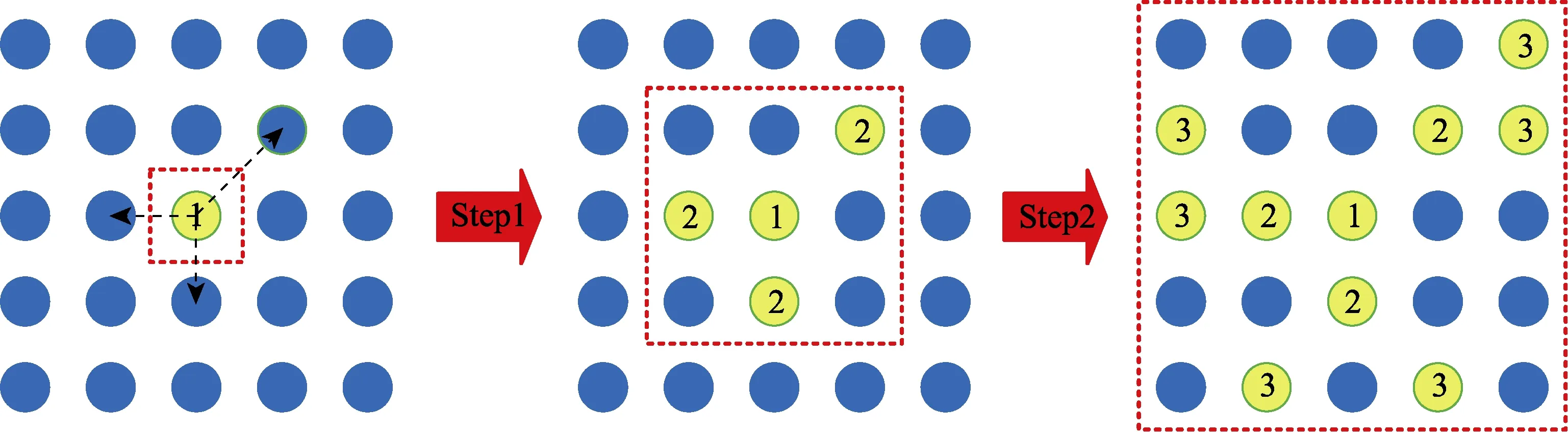
图2 自适应像素生长方法Fig.2 Adaptive pixel growth method
种子在目标区域、边缘区域和杂波区域的生长结果如图3 所示。在图3a 中检测到了包括2 个真实目标在内的所有20 个候选目标。对于红外小目标区域内的种子来说,阈值Th是从高灰度值的目标像素集合Tk和低灰度值的周围背景集合Pk中获得的。因此,种子的增长面积Sk相对较小,对应了图 3b 展示的1号种子的生长范围结果。对于边缘区域的种子(例如建筑和背景边界),种子将会沿着高灰度区域边缘生长,且不超过阈值范围,因此整个边缘区域将被种子生长区域所覆盖。图3c、d 显示了2 号和3 号种子的生长结果,显然种子在边缘区域的生长具有较高的密度。相反,当种子位于混乱的杂波区域时,生长的结果则较为稀疏,如图3e、f 所示。当4 号种子和5 号种子位于稀疏的杂波区域(例如云层、海天交界处和其他的漂浮物背景)时,由于生长像素集的密度较低,杂波区域的生长面积要小于边缘区域面积。
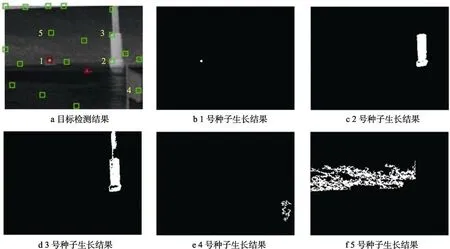
图3 种子在不同杂波区域生长结果Fig.3 Seeds growing in different clutter areas: a) results of target detection; b) growing result of No.1 seed; c) growing result of No.2 seed; d) growing result of No.3 seed; e) growing result of No.4 seed; f) growing result of No.5 seed
通过上述3 种不同杂波条件下生长结果的比较,可以发现,种子在目标区域通常具有最小的面积。此外,自适应像素生长方法可以有效地去除杂波附近生长的种子,保留目标区域的种子。因此,本方法与密度–距离空间方法可以通过高效的配合在已知真实目标的数量前提下准确地完成检测任务。
2 算法抗噪声实验
红外目标的检测效果容易受到图像噪声的影响,尤其对于本文算法,噪点对候选目标的选取有极大的干扰,因此首先应测试算法的抗噪声能力。为了能直观地反映算法效果,通过选择一个具有红外目标的图像,并将不同级别的高斯噪声添加到整个图像中来进行测试,如图4 所示。
图4 显示了具有不同信噪比(Signal to Noise Ratio,SNR)的噪声和目标的检测结果。其中SNR的定义如式(6)所示。

式中:2tσ表示目标区域的灰度值方差;2nσ表示高斯噪声的灰度值方差。在文献[7]的基础上,将SNR值按照由大到小设定,得出SNR 值在40~50 时,检测效果出现明显的变化。为了能更详细展示本文算法的抗噪声特性,将步长在此区间内缩小。由图4 可见,当SNR 值的范围为44.1~45.4 时,检测到理想的效果。当SNR 值降低到43.9 时,目标未被检测到。其余候选目标的位置变化是由高斯噪声的随机性引起的。因此,本文算法可以检测到目标的信噪比下限在44 左右。当信噪比高于44 时,本文算法可以检测到实际目标,当信噪比进一步降低,图片质量更差时,目标的检测效果并不理想。本次实验表明了基于密度–距离空间的自适应像素生长算法具有一定的程度的抗噪声能力。
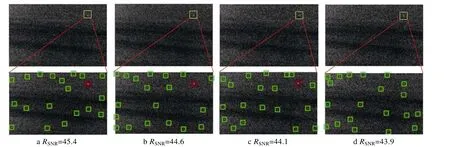
图4 算法抗噪声性能实验Fig.4 Algorithm anti-noise performance experiment
3 结论
1)图像复杂背景和噪声杂波会降低红外图像质量,当SNR 降低到一定程度时,目标检测速度和准确性都会大大降低。
2)通过本文提出的密度–距离空间方法和区域生长滤波方法,抑制多种类型的杂波,能够满足SNR值在44.1~45.4 时,从候选目标中检测出真实目标的任务。
3)考虑红外引信的工作环境不仅存在随机噪声干扰,还存在人为的红外诱饵干扰以及光照的影响,未来需要进一步提高算法对目标的检测和识别准确度。
