基于斜投影算子的引信抗主瓣干扰方法
2022-12-09张翔陈楠祺张珂王中洋
张翔,陈楠祺,张珂,王中洋
(机电动态控制重点实验室,西安 710065)
随着雷达、无线电引信等装备技术的进步,电子战已成为现代战争的决胜性因素。其中,以电子干扰为代表的电子战手段,对雷达、无线电引信等装备的性能正常发挥及其战场生存构成严重威胁。雷达、无线电引信在突防过程中,特别是在接近目标时,难免会受到目标附近干扰机的影响。强电子干扰可能使雷达、无线电引信等系统的探测性能下降,甚至使系统完全失效。因此,必须采取有效的对抗措施,才能确保系统正常工作。
针对雷达、无线电引信等系统受到的主瓣非平稳压制式干扰,当期望信号和主瓣干扰信号在空域上完全对准时,空域滤波算法在抑制干扰的同时,也抑制了大部分的期望信号,导致输出信干噪比(SINR)极低,甚至算法失效。因此,在信号处理中引入信号的极化域特征,当期望信号和干扰信号在空域对准时,利用极化域特征差异滤波,从而有效改善相控阵列空域滤波的性能,提高输出SINR。早期的极化抗干扰,主要通过改变雷达接收极化抑制干扰功率。文献[1-4]先后提出了自适应极化对消器(APC)、多凹口逻辑乘积(MLP)极化滤波器、多凹口逻辑乘积–自适应极化对消器(MLP-APC)和多凹口逻辑乘积–单凹口自适应极化对消器(MLP-SAPC)等概念,用于抑制部分极化的杂波和干扰。然而,仅凭极化域滤波,所形成的干扰抑制能力是有限的,极化抗干扰技术逐渐从单一极化域处理,向多域联合处理发展。文献[5-7]提出了极化域和空域滤波相结合的思想,研究了极化敏感阵列(PSA)的滤波性能。文献[8]研究了单个矢量传感器最小噪声方差准则波束形成问题。文献[9-10]研究了极化敏感阵列滤波性能的理论分析、量化评估和最佳选择。文献[11-14]研究了完全极化、相关干扰、阵列互耦等条件下,极化敏感阵列的滤波性能分析和极化敏感阵列信号处理方法。文献[15-16]通过空时极化联合处理,实现了对干扰信号的抑制。文献[17]提出了基于特征空间的广义波束形成算法(GEIB)。文献[18-19]将GEIB 算法推广应用到极化域中,实现了对干扰信号的抑制,但是其抑制效果还有进一步提升的空间。文献[20-21]提出了利用斜投影实现极化敏感阵列滤波。文献[22-24]提出了基于斜投影算子极化域滤波的干扰抑制方法。文献[25]研究了极化敏感阵列采用斜投影滤波和正交投影滤波的输出SINR 特性。文献[26]将斜投影算子应用于多域联合滤波,进一步扩展了斜投影的应用范围。
本文在前人研究基础上,提出一种基于斜投影的抗主瓣干扰方法。首先,针对干扰信号极化状态未知的情况,利用极化域–空域联合谱,估计极化参数,确定主瓣干扰信号;然后,构建斜投影滤波算子,去除主瓣干扰信号;最后,实施自适应波束形成的主瓣干扰抑制。通过仿真实验验证了该方法的优越性和正确性。
1 极化参数估计与斜投影算子构造
1.1 极化域–空域联合谱估计
极化域–空域联合谱是将多信号分类(MUSIC)空间谱,在极化域和空域联合域中推广而得到的,其基本思想与MUSIC 空间谱类似。极化敏感阵列接收数据协方差矩阵的信号子空间和噪声子空间相互正交,利用这2 种子空间的正交性,搜索联合谱峰值,可以得到极化参数的估计值。
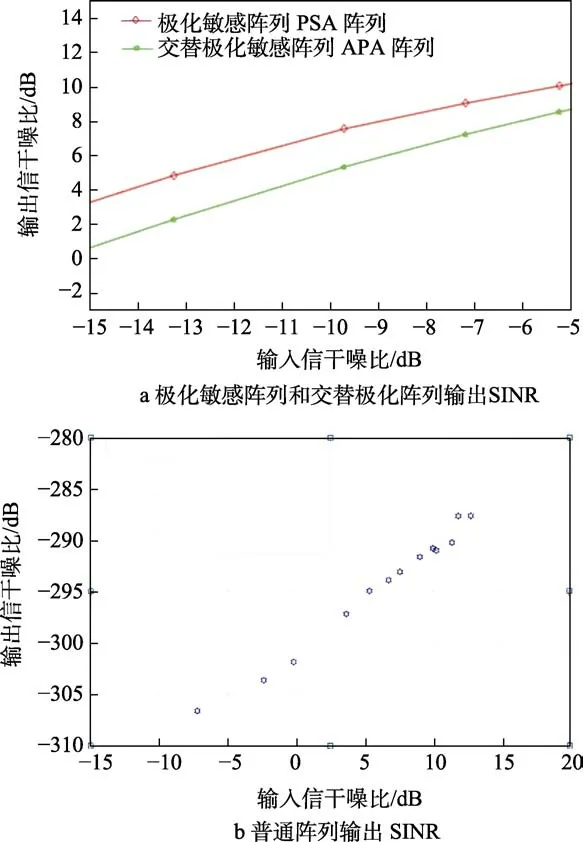
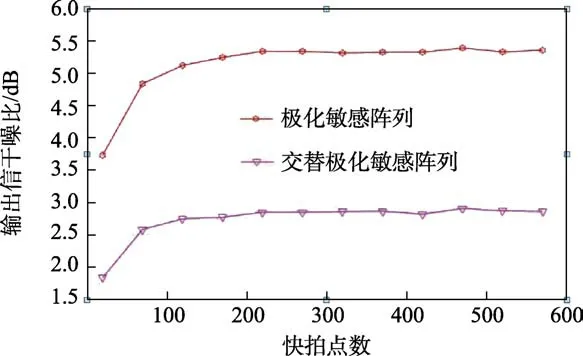
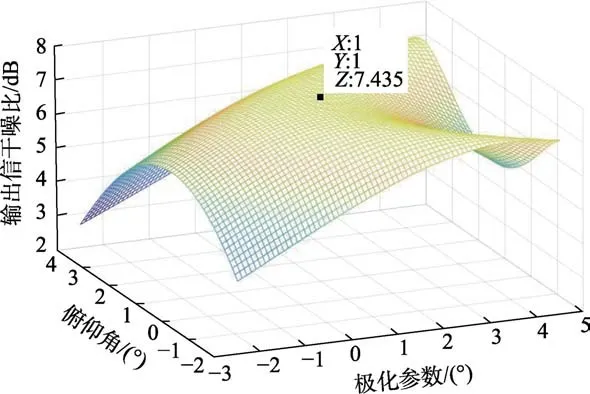
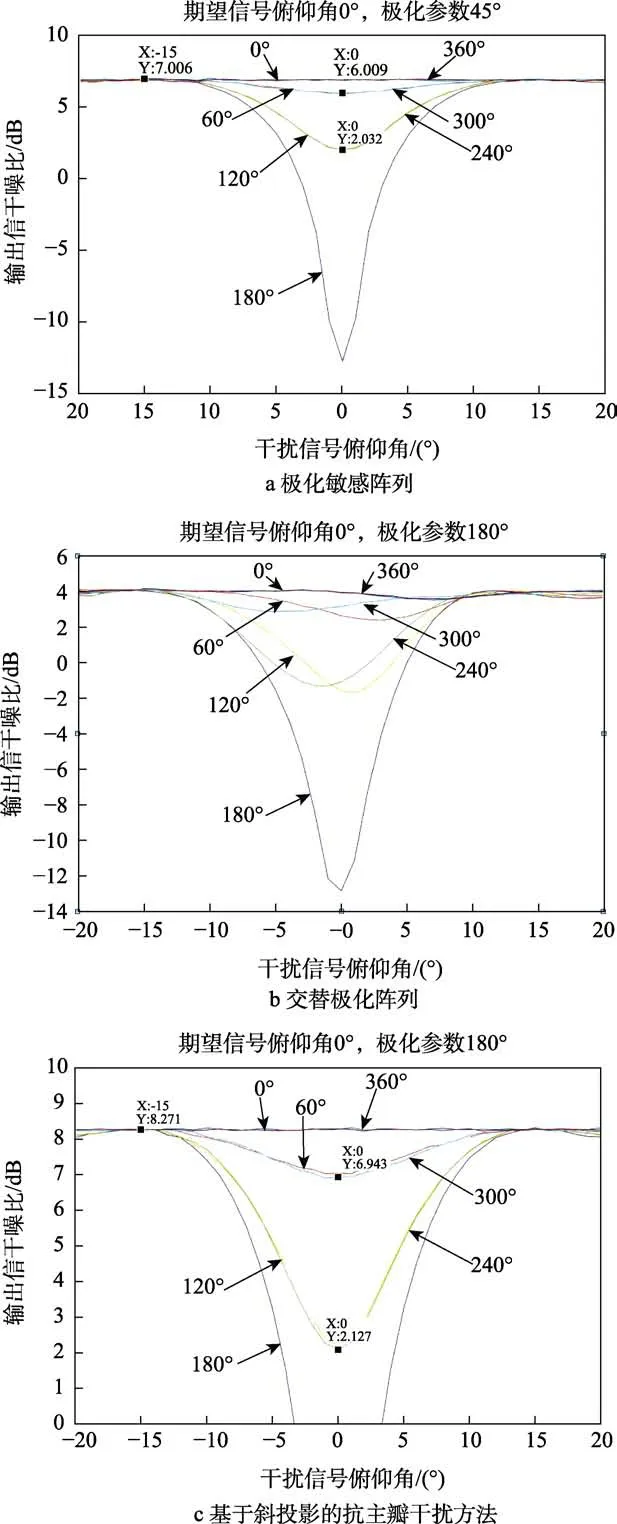
假设YOZ平面上有1 个期望信号和J个干扰信号入射至极化敏感阵列,将入射信号个数记为K=1+J 图1 极化敏感阵列结构Fig.1 Structure of a polarization sensitive array 在实际处理中,真实的协方差矩阵Rx是未知的,通常利用其最大似然估计值,即采样协方差矩阵Rˆx: 从式(3)可以看出,极化域–空域联合谱估计中,利用了全部的噪声特征矢量。因此,联合谱在非入射信号处非常光滑,而在信号入射处会有较为尖锐的峰值。通过搜索联合谱峰,即可确定信号的极化状态以及空域状态。联合谱幅度反映的是阵列扫描波束矢量投影长度的平方,并不是真正的入射信号强度。 在得到所有入射信号的空间入射角θ以及极化参数γ之后,根据干扰信号空间入射角θm与期望信号空间入射角θs的接近程度,可以确定主瓣干扰信号。设主瓣宽度为bw,如果干扰信号满足|θm-θs|≤bw/2,则其为主瓣干扰信号,其余为旁瓣干扰信号。主瓣干扰信号的参数(θ,φ,γ,η)确定之后,则其阵列导向矢量确定,于是可利用其导向矢量构造斜投影算子处理接收数据。 从式(8)可以看出,经过斜投影算子TSI的处理,阵列接收信号中已经完全滤除了主瓣干扰,且期望信号的幅度和相位没有任何变化。注意到处理完的数据中,仍保留了入射信号的极化信息,所以为了去除剩余干扰,可再次进行斜投影算子处理或者采用其他极化滤波方法。当阵列接收信号中存在多个不相干主瓣干扰时,经过第一次斜投影算子处理后的数据如式(8)所示。不妨假设sj(t)为另一个主瓣干扰信号,其对应的阵列导向矢量为aˆj,张成的干扰子空间为ˆI,再次构造从干扰子空间ˆI到信号子空间S的斜投影变换TSIˆ以去除主瓣干扰信号sj(t)。 式中:PI⊥为到干扰子空间的正交补空间的正交投影矩阵;E为单位阵。 采用基于特征空间的极化域–空域广义波束形成算法(SPGEIB),对式(8)进行自适应波束形成,设式(8)的协方差矩阵为Ry,有: 本小节的仿真实验面向极化敏感阵列,且不考虑非理想因素。仿真实验的内容分为3 个方面,首先,分析对比极化敏感阵列、交替极化阵列(APA)和普通阵列等3 种不同阵列在相同条件下输出SINR 与输入SINR 的关系,以及输出SINR 随快拍数的收敛情况。其次,针对干扰角和极化状态未知的情况,利用极化域–空域联合谱估计主瓣干扰信号的状态参数,当存在估计误差时,分析此时基于斜投影的主瓣干扰抑制方法输出SINR 的变化情况。最后,分析干扰的俯仰角和极化参量对基于斜投影的抗主瓣干扰方法的输出SINR 的影响,并与文献[18-19]作比较分析。 假设极化敏感阵列的阵元为8 对正交偶极子,如图1 所示。交替极化阵列的阵元为8 对分别沿X轴和Y轴放置的偶极子,如图2 所示。普通阵列为具有8个各向同性的天线接收单元的均匀线阵,阵元间隔均为1/2 波长。 图2 交替极化阵列结构Fig.2 Structure of an alternate polarization array 入射期望信号的参数(θ,φ,γ,η)中俯仰角θ1为20°,方位角φ1为90°,极化参数γ1和η1分别为45°和180°。入射的主瓣干扰信号的俯仰角θ2为20°,方位角φ2为90°,极化参数γ2和η2分别为5°和10°。类似地,2 个旁瓣干扰的参数分别为(50°, 90°, 85°, 100°)和(–10°, 90°,65°, 140°),噪声均假设为高斯白噪声。改变输入SINR,3 种阵列的输出SINR 如图3 所示。每组数据均由100 次蒙特卡洛实验得到。 图3 相同条件下3 种阵列输出SINR 随输入SINR 的关系Fig.3 The relationship between output SINR and input SINR for three arrays under the same conditions: a) SINR output from a PSA and an APA; b) SINR output from a normal array 对比图3a、b,可以得出如下结论:相同条件下,极化敏感阵列、交替极化阵列能够利用信号空域和极化域的信息滤波,滤波性能明显优于只能利用空域信息滤波的普通阵列。因为交替极化阵列正交偶极子的个数为极化敏感阵列的1/2,所以阵列性能不及极化敏感阵列,其输出SINR 大约有2 dB 的差距,说明交替极化阵列以略微牺牲极化阵列的滤波性能换取系统复杂度的减半。普通阵列面对在空域上和期望信号对准的主瓣干扰无能为力,而极化敏感阵列则仍能滤除此种主瓣干扰。 给定输入SINR 为–12 dB,极化敏感阵列和交替极化阵列的输出SINR 随快拍数的收敛情况如图4 所示。可以看出,极化敏感阵列和交替极化阵列的输出SINR 的收敛情况类似。因为交替极化阵列可以看作是一种特殊的极化敏感阵列,所以收敛速度基本一致,但是极化敏感阵列最终的输出SINR 要比交替极化阵列略高2.5 dB 左右,这也和前面的理论分析一致。 图4 给定输入SINR 为-12dB 时阵列输出的收敛关系Fig.4 Convergence of the arrays for a given input SINR of –12dB 本小节仿真实验面向极化敏感阵列且不考虑非理想因素的影响,假设入射期望信号和3 个干扰信号(包含1 个主瓣干扰信号和2 个旁瓣干扰信号)的参数(θ,γ)分别为(0°, 65°)、(1°, 1°)、(50°, 85°)、(-60°,25°)。方位角φ均为90°,极化参数η均为180°。噪声均为高斯白噪声,且输入SINR 为–10 dB,则极化域–空域联合谱估计仿真如图5 所示。 图5 极化域–空域联合谱估计仿真Fig.5 Simulation of the joint spectrum in polarizational and spatial domains 从图5 可以看出,所有4 个入射信号在联合谱中均能清晰呈现,谱线光滑,且在入射信号处有尖锐峰值,谱峰检测概率较大。由前面对联合谱的分析可知,极化域–空域联合谱是定义在四维空间(θ,φ,γ,η)上的,其分辨率应当远远高于在二维空间(θ,γ)上的谱估计分辨率。从峰值点可以看出,4 个入射信号的参数估计相当准确,通过检测谱峰即可确定对应的俯仰角θ和极化参数γ。不妨假设主瓣宽度bw=3°,根据期望信号的俯仰角为0°,则在主瓣区间θ∈[–1.5°,1.5°]内的干扰信号均为主瓣干扰。由图6 可知,主瓣干扰的估计参数(θ˜, )γ˜ 为(1°, 0°)。 图6 主瓣干扰导向矢量失配时的输出SINRFig.6 Output SINR when the mainlobe interference guidance vector is mismatched 从图6 可以看出,当极化域–空域联合谱估计主瓣干扰的参数误差区间为俯仰角θ˜ ∈( -2 °, 4°),极化参数γ˜ ∈( -2 °, 4 °)时,即意味着主瓣干扰的导向矢量与真实导向矢量存在微小的误差,此时基于斜投影的抗主瓣干扰方法的输出SINR 如图6 所示。(θ˜,γ˜ )越接近(1°, 1°),则输出SINR 越高,且在位置(1°, 1°)处的曲面中心曲率较大,而不是高耸的峰值点。这意味着即使存在一定误差,主瓣干扰依然能得到较为充分的抑制,且曲面整体覆盖的输出SINR 范围为(4 dB, 7 dB),说明该方法的稳定性较好,系统鲁棒性较强。 本小节仿真实验面向极化敏感阵列且不考虑非理想因素的影响,期望信号的空域参数和极化参数(θ1,φ1,γ1,η1)为(0°, 90°, 45°, 180°),2 个旁瓣干扰信号的参数分别为(50°, 90°, 85°, 180°)和(–60°, 90°, 25°,60°)。设主瓣干扰信号的参数为(θ2,φ2,γ2,η2),其中方位角参数φ2=90°。 1)仿真实验一。固定主瓣干扰的极化参数η2=180°,3 种方法的输出SINR 随主瓣干扰角度θ2在–20°~20°和极化参数γ2在0°~90°间隔15°的变化情况如图7 所示。 由图7 对比可知,当干扰俯仰角在主瓣宽度以外时,3 种方法均有较好的效果,此时空域滤波效果良好,阵列仅靠空域能力就能滤除干扰,极化信息的作用不明显。提出的基于斜投影的抗主瓣干扰方法对位于主瓣宽度以外的旁瓣干扰依然能够有效抑制,阵列输出SINR 高于文献[18-19]中的方法,显示出良好的优越性和鲁棒性。 图7 仿真实验一中3 种方法的输出SINRFig.7 The SINR output from the three methods insimulation experiment Ⅰ: a) PSA; b)APA; c)Anti-mainlobe jamming method 从图7c 可以看出,当主瓣干扰俯仰角θ2、极化参数γ2和期望信号俯仰角θ1和极化参数γ1一致时,建立的方法输出SINR 陡降。这是因为此时期望信号和主瓣干扰信号的极化域–空域导向矢量完全相同,斜投影算子在滤除主瓣干扰信号的同时,也剔除了期望信号,因此输出SINR 极低,斜投影算子失效。事实上,当期望信号和干扰信号在空域入射对准时,通过引入信号的极化域信息来滤除主瓣干扰信号的前提是主瓣干扰信号和期望信号的极化状态不一致。建立方法的初衷也是当期望信号和主瓣干扰信号极化状态存在差异时,尽可能提高输出SINR。对比图7a、b、c 可以看出,只要保证期望信号和主瓣干扰信号极化参数满足|γ2-γ1|≥20°,则建立的基于斜投影算子的抗主瓣干扰方法就能获得明显优于其他2 种方法的输出SINR。 2)仿真实验二。固定主瓣干扰的极化参数γ2=45°,3 种方法的输出SINR 随主瓣干扰角度θ2在–20°~20°和极化参数η2在0°~360°间隔60°的变化情况如图8 所示。 图8 仿真实验二中3 种方法的输出SINR 变化情况Fig.8 The SINR output from the three methods in simulation experiment Ⅱ: a) PSA; b)APA; c)Anti-mainlobe jamming method 从图8 可以看出,当期望信号和干扰信号的极化参数满足γ1=γ2时,极化参数η的变化对输出SINR的影响和γ对输出SINR 的影响类似。期望信号的俯仰角为0°,极化参数γ1=180°,在干扰俯仰角对准期望信号的俯仰角时,两者的极化状态参数η越接近,输出SINR 越小。这是因为两者的极化状态越接近,极化敏感阵列的极化域滤波能力就越弱。当期望信号和主瓣干扰信号的极化参数满足|η2-η1|≥60°时,建立的方法即可获得优于其他2 种方法的输出SINR。 综上所述,当期望信号和主瓣干扰信号在空域对准时,利用信号的极化域状态差异能获得良好的滤波效果。当两者的极化状态满足一定程度的差异时,提出的基于斜投影算子的抗主瓣干扰方法能够取得优异的效果,性能明显优于文献[18-19]中的方法,并显示出良好的优越性和鲁棒性。 针对主瓣干扰信号极化状态未知的情况,通过极化域–空域联合谱估计极化参数,确定主瓣干扰信号,再构建斜投影滤波算子去除主瓣干扰信号,最后进行自适应波束形成。通过仿真验证了该方法的优越性和正确性,可以应用于雷达、无线电引信等系统对主瓣干扰的抑制,提升雷达、无线电引信等系统适应复杂电磁环境的能力。

1.2 斜投影算子构造及自适应波束形成



2 仿真实验和分析
2.1 3 种阵列的性能比较分析

2.2 极化域–空域联合谱估计仿真

2.3 入射信号的俯仰角及极化参量对输出SINR 的影响

3 结语
