核电站机器人技术现状及发展方向
2022-12-07马永红刘伊威马其钊
马永红 刘伊威 何 贇 马其钊
(1.中核四川环保工程有限公司,四川 广元 628007;2. 哈尔滨工业大学机器人技术与系统国家重点实验室, 黑龙江 哈尔滨 150006)
进入21世纪后,世界人口和经济飞速增长,人类面临着诸如煤炭、石油等化石燃料日益枯竭的能源问题。为此,世界各国积极调整能源结构,通过布局核电来满足人类对电力的需求,同时极大地减少了对环境的污染。虽然核能给人类带来了源源不断的能量,但人类也可能面临核辐射所带来的严重威胁,如1986年苏联切尔诺贝利核泄漏事故、1999年日本铀回收处理设施核事故、2011年日本福岛核电站特大核泄漏事故等。为确保核电站的安全运行,核电设施的在役检查和维护作业,以及发生核事故后的应急处置工作必不可少。但核电站内部场地狭窄,管道纵横交错,且存在着高辐射、高温、强酸碱腐蚀等恶劣环境,工作人员无法进入某些特性区域对设备进行维修、检查等操作。为了应对上述复杂而危险的作业环境和作业内容,采用机器人代替人执行巡检与核电设施维护、事故应急处理与救援、核电设施的拆解与搬运等工作,可大幅度提高核电站的检修水平或事故处理效率,从根本上避免人员受到辐射伤害,体现了以人为本的安全理念,有着不可估量的社会价值和广阔的应用前景。本文将对核电站机器人技术的研究现状进行介绍和分析,并对核电机器人技术未来的发展方向进行展望。
1 核电站机器人技术现状
1.1 核电设施巡检与维护机器人
核电设施的巡检与维护是核电站安全运行的前提。从20世纪80年代起,美国、法国、日本和德国等国就开发研制了一系列核电设施巡检与维护机器人。SURBOT机器人由美国Remotec公司开发研制,其外形为圆柱体状,直径790mm,高度1400mm,重量270kg,移动灵活,回转半径可接近于0。机器人配有七自由度机械臂,能够执行诸如开关阀门、清洁异物等任务。日本核安全中心研发的履带式核电站巡检和维护机器人Monirobo,如图1所示。该机器人体积为1.5m×1.5m×0.8m,重量约为600kg,双履带每分钟可以行进40m,配有可移除障碍和收集样品的机械臂,可对环境中的粉尘样品和可燃气体进行检测。

图1 Monirobo机器人
虽然国内针对核电站机器人的研究起步较晚,但发展速度较快。东南大学与南京军区防化研究所合作研制了一款可应用核环境下的侦察与探测机器人。该机器人自重27kg,平地最大负载60kg,搭载的机械臂最大伸展长度为1m,可以攀爬小于45°的斜坡,并可进入10Gy/h的放射性环境中工作,执行完任务后可自行洗消。
1.2 事故应急处理与救援机器人
核事故发生后,大量放射性物质泄露到空气中,核反应堆周围环境在爆炸和火灾中变得异常复杂。为了避免人受到高强度辐射或二次爆炸的风险,机器人在核事故应急处理与救援领域得到了越来越广泛的应用。1990年,美国加州理工学院喷气推进实验室研制出了紧急事务响应机器人HAZBOT。该机器人能够应用于执行危险物品紧急响应任务,包括事故定位和特性描述、危险物识别分类、现场监视和监测,并最终减轻事故后果。日本千叶工业大学研制的Quince机器人将多自由度机械臂加装在履带移动平台上,操作人员可以远程控制机械臂实现开门、夹起物品等操作。Quince经过改良后被部署在福岛第一核电站1号3单元的反应堆建筑内进行侦察,并对放射性废水做了取样,进行了热度和剂量率测量。基于Quince机器人的设计经验,千叶工业大学联合日本三菱重工又研发了如图2所示的机器人樱花2号,并投入到福岛核电站的救灾现场。樱花2号机器人尺寸为710×420×540mm,重量为60kg,最快时速为1.2km。机器人内置电池的续航时间为2.5h,完全代替工作人员完成事故现场的探查任务。

图2 樱花2号机器人
1.3 核退役机器人
随着核工业的迅速发展,各国在大力新建核电设施的同时,也面临着早期核电设施的退役、拆解等问题。在捷克斯洛伐克共和国第一台核电站A-1核电站的退役工程中,应用了MT-15普通型移动机器人、MT-80通用型机器人和DENAR-41长臂机器人。
如图3所示,MT-15是由履带式移动小车搭载4自由度灵活机械手组成的模块化机器人系统,系统由蓄电池供电,同时配备有两个相机,以完成核环境采样、测量和净化。MT-80机器人具有6个液压驱动关节,主要用于核环境下工作的设备和管道的拆解、切割和回收。DENAR-41机器人有7个自由度,基座固接在一个轴承系统上,机械臂关节由液压驱动,主要用于地下存储罐的切割、净化等任务。
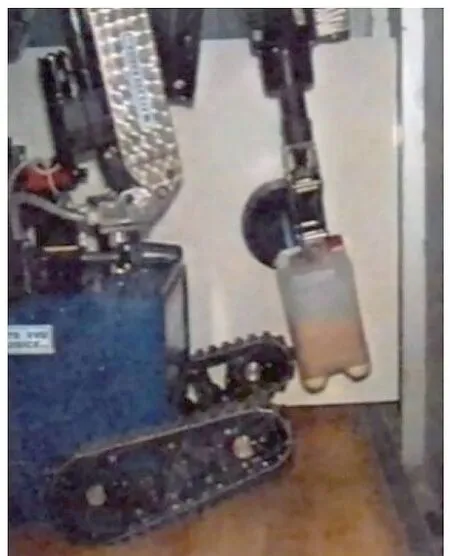
图3 MT-15型机器人
2 核电站机器人技术的发展方向
从上节的研究现状可以看出,核电站机器人及其技术已经取得了丰硕的成果,并在实际应用中发挥了重大作用。随着传感技术、信息技术、自动化技术的不断发展和制造工艺水平的提高,高智能化、高可靠性、高恶劣环境适应性和功能多样性等将成为核电站机器人应用的发展趋势。
2.1 移动结构设计
作为核电站机器人的移动载体,移动机构必须具有以下特点:一定的移动速度和低能耗;良好的姿态稳定性和高运动精度;适应各种地理环境,有一定的爬坡和越障能力。针对不同的作业环境,核电站机器人可以采取不同形式的移动机构,包括轮式、腿式、轮腿式、履带式、爬壁式等。目前,移动机构的发展趋势是:从轮履式结构向仿生结构方向发展,尺寸上向微小型化方向发展。
2.2 机械手设计
作为核电站机器人的操作装置,机械手在非结构复杂环境中能够完成各种复杂的操作作业,是核电站机器人的重要组成部分。用于核电站的机械手具有以下技术要求:灵巧性和可操作性好,能够适应不同的操作对象和作业任务,结构紧凑,定位精度高,较小的自重和较大的负载能力,具有位置和力感知,环境适应性强,可靠性高。
2.3 核辐射防护设计
核电站机器人区别于其他工业机器人的最大特征就是适应核辐射特殊服役环境,这就要求核电站机器人,特别是其视频检查系统、传感系统和信号传输系统能够在较高的辐射环境下保持正常工作。解决途径包括两个方面:一是对关键部件和系统进行耐辐射设计;二是要采用一定的核防护技术,使系统处在相对安全的环境下工作。
2.4 可靠性设计
目前,机械系统可靠性设计已经成为机械工程领域的一个热点研究方向。提高核电站机器人可靠性所涉及的关键技术主要包括机械结构的可靠性设计、电控系统的可靠性设计、系统的故障容错控制、三维运动仿真技术和故障模拟测试技术等。
2.5 自主智能化设计
核电站机器人在复杂环境下进行智能避让、自动搜索,在无人工干预的情况下,快速确定搜索路径,顺利通过各种障碍物和狭隘的通道,精确定位到需要检查或修复部位的技术是一个重要的研究方向。核电站机器人需要实现对缺陷的自动判断、自动识别,这需要核电现场数据的数据库支持和高端传感系统、控制系统支持。在部分维修过程中,还需要具备自主修复功能,对机器人本身的故障能够做出自主判断和处理,以保证维修工作的正常进行。
3 结语
本文在分析现有核电站机器人技术的基础上,对未来核电机器人的发展趋势进行了展望。随着我国在精密机械加工、自动化控制、信息技术等方面的强势崛起,开发出针对核电站特殊环境的系列化、规模化机器人装置的目标一定可以实现,核电站机器人技术的应用必将迎来一个快速发展期。
