基于信号灯控制的交叉路口智能网联车辆协同通行方法研究
2022-12-05姚建盛郑南豆
毛 晗,姚建盛,郑南豆
(湄洲湾职业技术学院 智能制造工程系,福建 莆田 351119)
0 引言
目前,交通冲突区域带来的安全问题越来越多,例如,城市快速路匝道上设置的交通合流区就属于典型的交通冲突区域。驾驶员在城市快速路匝道行驶过程中,必须准确判断加速或减速,以安全进入城市快速路主路行驶,很多交通事故或拥堵都发生在该冲突区域[1-2]。我国大连至沈阳高速公路事故中,6.5% 的交通事故发生在道路交叉匝道合流区域,是其他高速路段发生交通事故概率的5~6倍[3-4]。因此,道路交叉匝道合流区域的车辆协同通行成为了智能交通领域重点关注和研究的问题,对降低事故发生率、拥堵率具有重要意义。
近几年来,国内外智能交通领域的专家学者提出了基于大数据、区块链、传感器等技术环境下的智能交通系统(ITS),对于解决城市道路交通中各种问题提供了理论基础[5-6]。随着智能交通系统的发展,车路/车车技术(V2I/V2V)也得到了相应提高,车用无线通信技术(V2X)大大提高了车路/车车之间数据通信的准确性。V2X技术中的短程通讯技术(DSRC)为车辆协同通行控制、安全驾驶、通行效率提供了保障[7-8]。智能网联汽车(ICV)的出现缓解了城市道路交通中的拥堵问题,也为城市道路交通运行发展提供了新的思路。基于云计算、人工智能、传感器控制等技术的智能网联汽车可以在车联网的环境下实现高效、安全、精准的自动驾驶[9]。因此,研究城市道路交叉路口车辆协同通行方法将是智能网联汽车未来发展方向。
1 智能网联车辆协同通行模型建立
1.1 问题描述
本文主要对智能网联车辆在道路交叉路口交通信号控制时长进行模型优化处理,实现车辆协同通行。在k时刻,车辆状态设置为V(k),信号状态设置为S(k)。车辆状态随着信号状态的改变而变化,信号状态根据信号函数的改变而变化。设置时间范围为[0,t],将此范围内特定的性能指标进行最小化处理。
设置一个单个交叉路口,其交通信号时长优化目标函数:
(1)
创建约束条件得到
V(0)=V0,S(0)=S0
(2)
V(k+1)=fv(V(k),Vn(k),S(k))
(3)
S(k)=fs(G,k),G={G1,1,G1,2,…,Gnp,nc}
(4)
Ns=fN(V),td=fT(V),V={V(0),V(1),…,V(t)}
(5)
(6)
Gmin≤Gi,j≤Gmax,Gi,j∈Z,i∈{1,2,…,np},j∈{1,2,…,nc}
(7)
在时间范围[0,t]中,信号周期数表示为nc;信号相位数表示为np;某一个信号周期中,信号相位的时长表示为Gi,j;停车车辆总数表示为Ns;全部车辆总延时表示为td;车辆初始状态表示为V0,S0;权重系数表示为w1,w2;某一时刻车辆进入车联网环境状态表示为Vn(k);抽象的车辆动力学和演化函数表示为fv(·)和fs(·);计算得到的抽象函数表示为fN(·),fT(·);交通信号灯绿灯间隔时间表示为Gint;最大间隔限制和最小间隔限制表示为Gmin,Gmax。
为了便于研究,设置了部分假设条件:一是全部车辆配置了V2I通信设备,当车辆行驶在有效范围内时,通信设备可以通过手机网络上获得车辆数据信息;二是车辆均以vlim速度行驶。
1.2 优化求解
如果车辆没有进入车联网环境,则无法获取到车辆信息,很难得到交叉路口交通信号时长优化目标函数。本文综合考虑了不断有新车辆进入车联网环境,通过预测优化方式得到目标函数的最优解。在k时刻实际道路交通状态,车辆状态V(k)和信号状态S(k)输入到交通流模型中,并通过遗传算法得到最终的预测优化结果,将第一个最优解作为信号控制,重复以上步骤得到滚动时域。
“箕子”之“箕”说明他是“箕”地之长,那么“微子”之“微”应该透露的是启乃“微”地之长,“微”也是地名。《书·微子·序》孔传云:“微,圻内国名,子爵,为纣卿士。”《史记·殷本纪》司马贞索引:“微,国号,爵为子,启,名也。”微在今山东微山附近。说明微子和箕子原本各自有其地盘。这里我们没有说是他们的封地,因为目前的文献还不能证明殷商有过分封制度。也正是如此,所以“武王乃释微子,复其位如故”。何“故”呢?难道不是原有的“微”地吗!
(8)

(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)

1.3 交通流模型
本文中的交通流模型是从Na-Sch模型中导出的,采用的是基于信号灯控制的交叉路口的单车道元胞自动机模型[10]。交通流模型属于离散状态模型,模型道路网是相等的单元结构,单元即可以被车辆占用,也可以空置。当交通流模型的某一个单元被车辆占用时,采样间隔设置成1 s,车辆状态根据以下规则更新:
1)车辆加速
设置一个车辆记作n,车辆n以较高的车速行驶,其逐步加速
vn→min(vn+aveh,vlim)
(17)
车辆n的速度记作vn;加速度记作aveh;最大速度记作vlim。
2)车辆减速
vn→min(vn,dn,sn)
(18)
当交通信号灯变化,或者停车线后单元未被占用时
vn→min(vn,dn)
(19)
式中:车辆n与前车距离记作dn;与停车线的距离记作sn。
3)随机步骤
车辆n在行驶的过程中随时会发生减速,可能性设置为pd(0≤pd≤1)
vn→max(vn-1,0)
(20)
4)车辆移动
车辆以速度vn行驶,xn用于表示此时车辆n的实际位置
xn→xn+vn
(21)
在本文的交通流模型中,没有过多考虑车辆复杂的行驶行为,假设车辆保持单车道直行,可能发生被道路交通信号灯控制停止或放行通过的车辆。接下来,本文采用了遗传算法求得最优解。
1.4 滚动时域控制
采用遗传算法获得最优解后,将其用于对交通流量的控制:
(22)

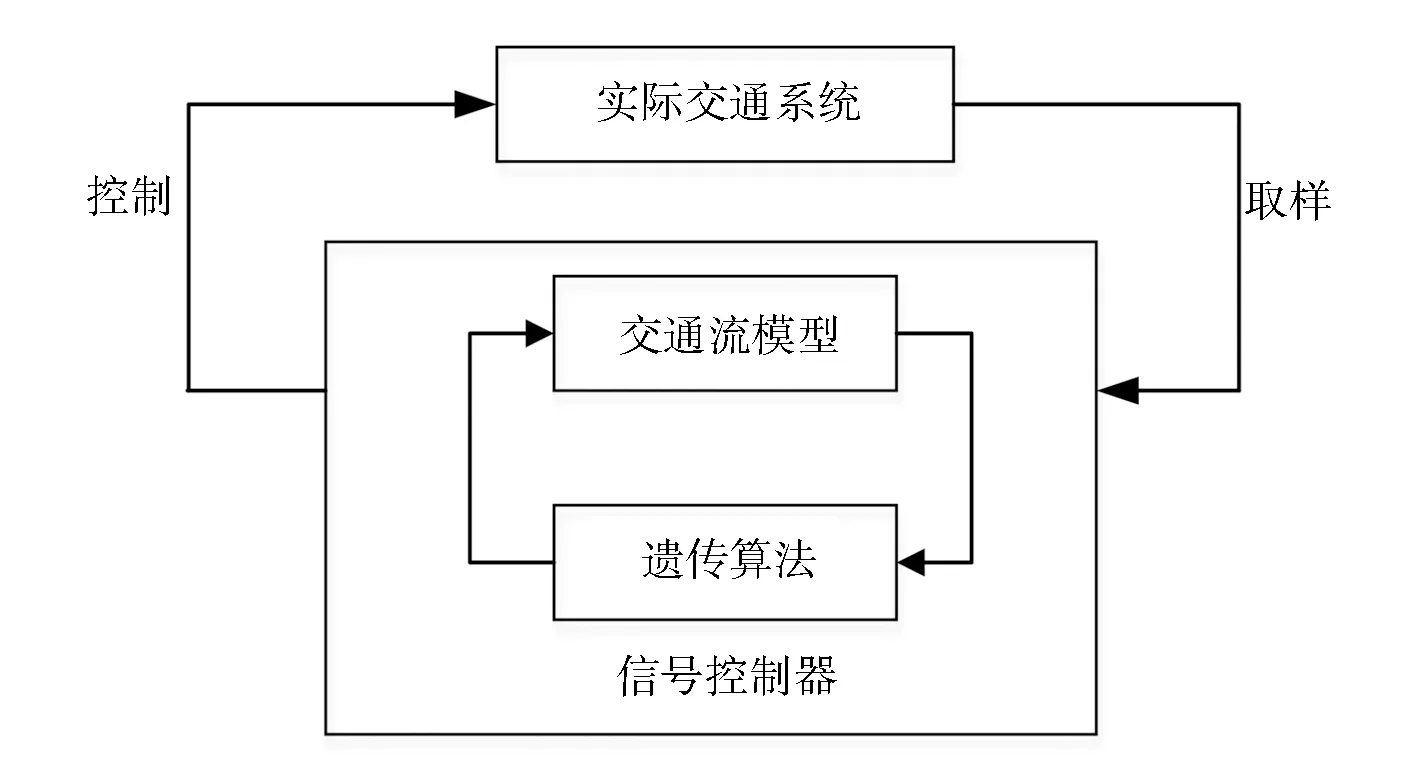
图1 滚动时域控制架构示意图Fig.1 Schematic diagram of receding horizoncontrol (RHC) architecture
2 仿真实验
为了验证提出交通控制信号优化方案的有效性,基于VISSIM交通仿真软件和MATLAB平台进行仿真实验。
2.1 初始化参数
创建一个道路单个交叉路口模型,交叉路口的4个分支道路相同,且输入的车辆流量相等,4个分支道路始终允许车辆右转行驶。
实验通过对本文提出的V2I交通信号灯控制方法和感应式交通信号灯控制方法进行了对比。在感应式交通信号灯控制方法中,综合考虑了车辆通信量和通信范围对道路交通信号灯控制可能产生的影响,Gmin表示绿灯最小时长,Gmax表示绿灯最大时长,延时设置为ΔG。仿真参数如表1所示。
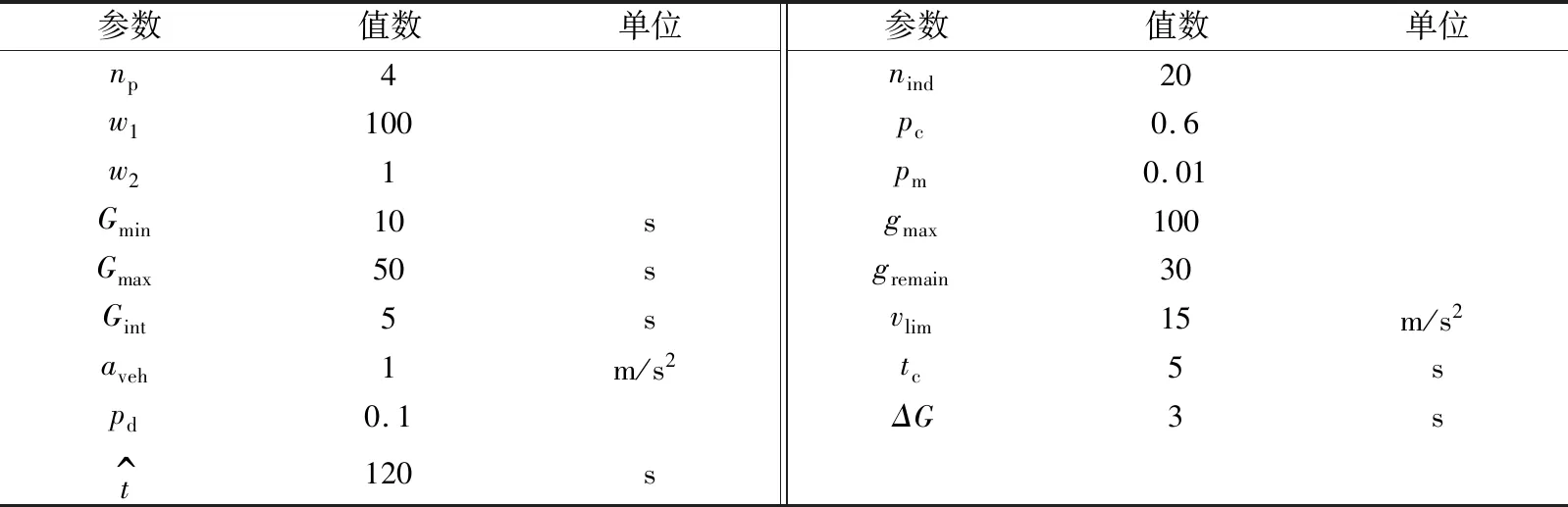
表1 仿真参数Tab.1 Simulation parameters
如表1所示,本文针对遗传算法中的部分参数进行了调整,以达到更好的收敛效果。信号相数np设置为4;权重系数w1设置为100,w2设置为1;最小间隔时间Gmin设置为10 s,最大间隔时间Gmax设置为50 s;Gint表示的是绿色间隔持续时间,设置为5 s。仿真后得到的解收敛性良好。
2.2 仿真实验结果
仿真实验结果如图2所示,图2对比了V2I的信号控制方法和感应式信号控制方法在4种性能指标下的信号控制情况,包括平均延迟时间对比情况、平均停止次数对比情况、平均队列长度对比情况和最大队列长度对比情况。当固定车辆通信范围为Rcom=250 m时,通行量设置为240 辆/h,间隔120 辆/h,最大通行量为720 辆/h。从图2(a)、图2(b)得出,为了提高车辆通行效率,V2I信号控制方法采用减少平均延时和平均停止次数的方式,尤其是当车辆通行量较高时,V2I信号控制方法的改进效果越加明显。同时可以看出,V2I信号控制方法对于减小平均队列长度和最大队列长度来说效果并不明显,在车辆通信量较低的情况下,没有得到良好的改善。
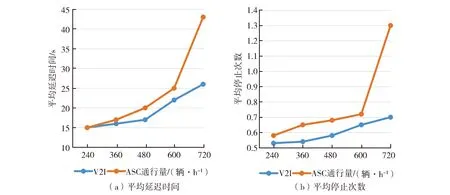
图2 仿真实验结果图Fig.2 The results of the simulation experiment
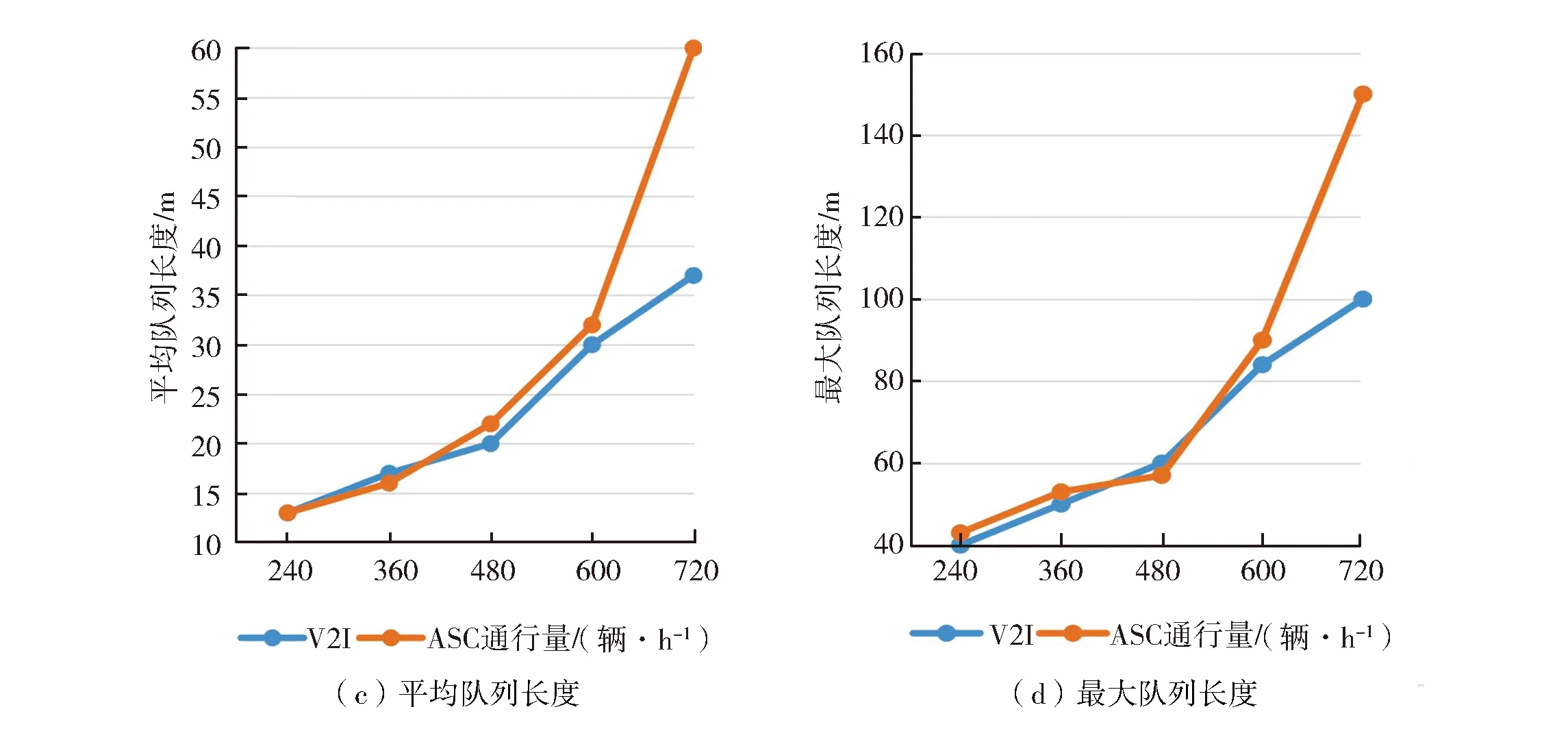
图2 (续)Fig.2 (Continue)
当通信距离和车辆通信量发生改变时,V2I信号控制方法的仿真实验结果如图3所示。当通行量较高时,交通延误次数和平均停车次数增幅较大。在一定的通信范围内,当通信距离Rcom发生变化时,交通延迟改变并不十分明显,但随着通信距离Rcom的增加,平均停车次数下降明显。这是因为实验采用了固定时间策略,在设定的通信范围中,预测时域中的固定信号直接影响车辆行驶。当通信范围逐渐增大时,道路交叉路口距离较远的车辆也会影响预测时域中的固定信号。其中,由于设置了滚动时域,十字路口停车线附近的车辆受到的影响最为明显。由此可以看出,不是单纯地增加通信范围就可以改善信号控制性能。但是,如果每一个周期的定时信号不同,对于远离十字路口停车线的车辆影响较小,进而能够提高信号控制性能,同时增加计算量。
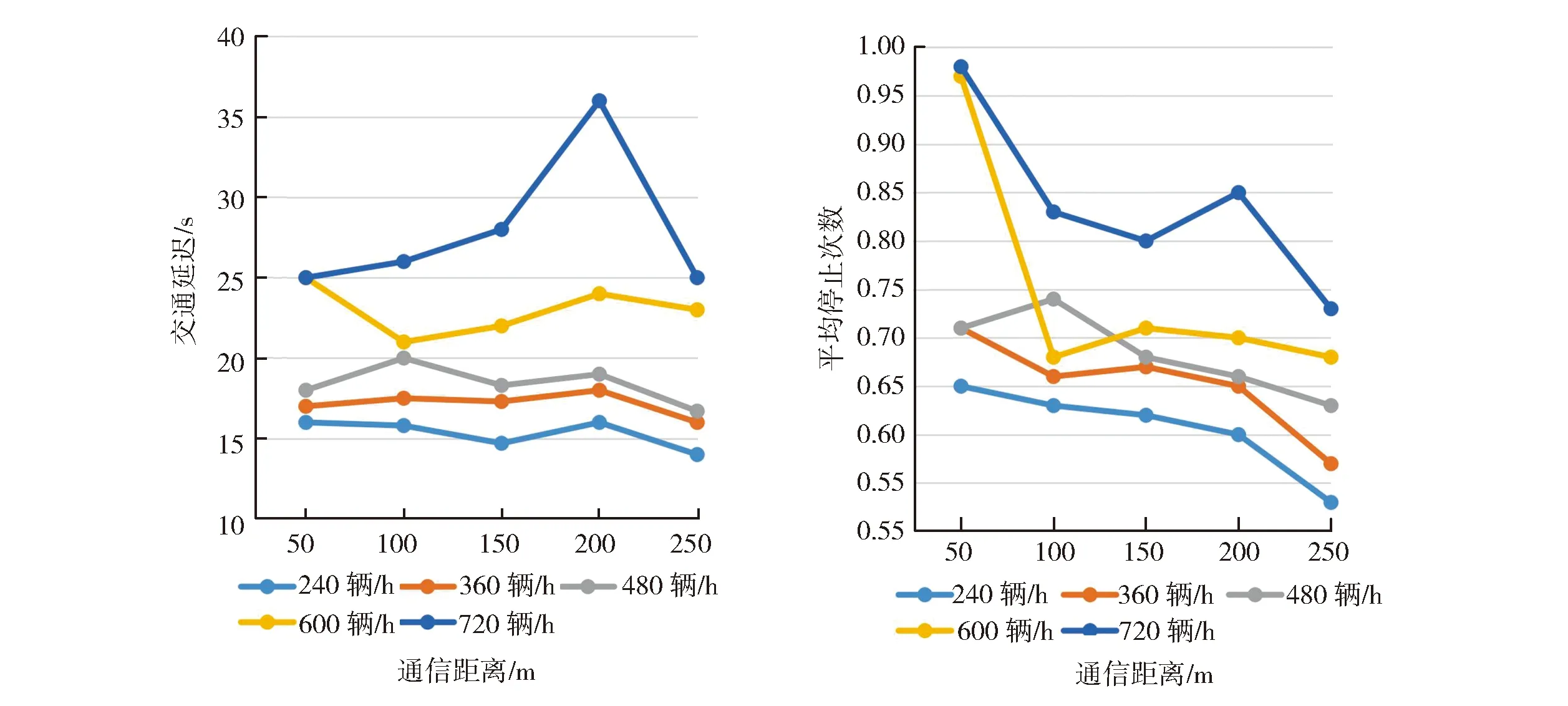
图3 V2I仿真实验结果Fig.3 V2I simulation results
图2、图3中,当交通量为Vtraffic=720 辆/h时,且通信距离Rcom=200 m时,均出现了峰值。这是由于当交通量逐渐升高时,有增加的车辆需要在停车线之前排队。由于车辆数量较大时,会产生更大的误差,直接影响到预测的准确性。当车辆流量为随机输入时,信号控制的性能会降低。
3 结论
本文设置了单个交叉路口模型,对交通信号时长进行算法优化。在设定的时间范围内,确定每一个交通信号相位的时长,使性能指标最小化。针对预测优化问题建立模型,将固定时刻的交通状态输入到交通流模型进行预测,再利用遗传算法得到预测优化问题的最终解,将排在首位的解用于信号控制,再不断重复以上步骤得到滚动时域控制。为了验证信号优化方法的实际性能,对V2I交通信号灯控制方法和感应式交通信号灯控制方法输入不同控制指标进行仿真实验。实验结果表明,V2I信号控制方法能够有效提高车辆通行效率,主要依靠减少平均延迟时长和车辆停止次数实现,尤其是在交通量较大时,优化效果更加明显。
