RJQ6-1 机器人的空间轨迹仿真与分析
2022-12-01侯永权柳小勤
侯永权,柳小勤
(650500 云南省 昆明市 昆明理工大学 机电工程学院)
0 引言
工业机器人作为现代工业的先进化产品,其研究周期长,成本高,而仿真技术的发展可以弥补这个缺点。工业机器人理论分析和不断进步的仿真技术相融合,加快了机器人的研究进程。MATLAB的辅助工具获得众多研究人员的兴趣[1],MATLAB不仅有编程功能,还可以进行数据图形处理、二维三维图形绘制,有运算等具体工具[2]。可以运用MATLAB 机器人模块工具箱专业计算能力,进行机器人运动学虚拟建模,分析机器人的动力学运动学。在MATLAB 中,使用机器人Robotics Toolbox编程,对六自由度机器人做点到点、圆形曲线运动的轨迹仿真,可以得到六自由度关节型机器人的角速度、角位移、角加速度曲线[3]。运用机器人工具箱进行空间轨迹规划,可以降低机器人的使用成本,提前合理规划机器人路径,提高机器人工作效率[4]。
本文针对机器人轨迹规划进行研究分析,对其进行数学建模,使用机器人工具箱进行开发,模拟分析机器人的工作空间;增加循环算法,对点到点的运动轨迹进行仿真分析,得出其运动轨迹及其关节角度、角速度、角加速度曲线;对平面圆形轨迹进行运动规划,得到运动轨迹和目标曲线一致,验证了算法的准确性。
1 RJQ6-1 机器人的运动学模型
机器人连杆坐标如图1 所示。RJQ6-1 机器人主要由机器人旋转支撑底座、回转体、大小臂、机器手腕构件组成,是常见的关节型机器人,通过前面三个主运动到达选取参考点的位置,后面三个腕关节则配合前面三个运动确定手腕末端的具体末端位姿,共同完成手腕的翻滚、偏转、俯仰几个工作动作。通过对机器人的基础运动结构分析,建立了RJQ6-1 的模型,这是对机器人研究的数学基础。采用全新改进 (MD-H)法对机器人的6 个连杆运动参数分析,建立了其运动结构D-H 参数表,为机器人正逆运动学理论研究提供可靠完整的理论依据支撑[5]。根据坐标系位置和各个连杆关节参数,建立如表1 所示的关节连杆D-H 参数表。
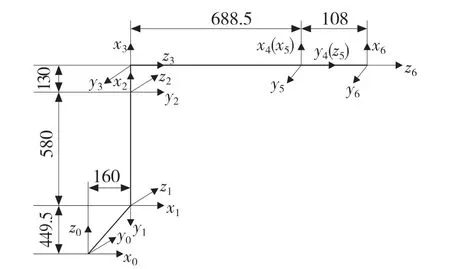
图1 机器人连杆坐标系Fig.1 Robot linkage coordinate system
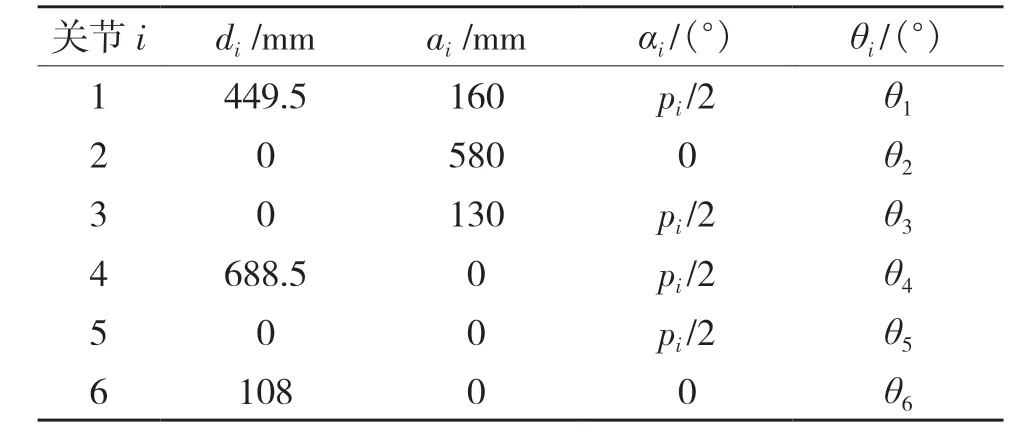
表1 关节连杆D-H 参数表Tab.1 Parameters of joint connecting rod D-H
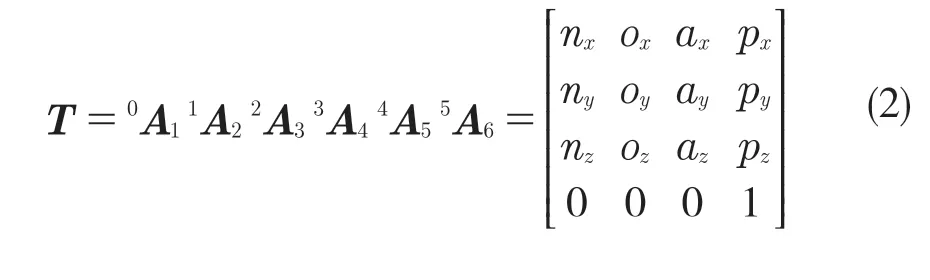
在确定了JQR6-1 机器人的每一个连杆参数以后,就可以确定改进的D-H 参数。采用改进D-H方法的机器人有以下4 个参数:连杆长度a、连杆偏距d、关节转角θ、连杆扭转角α[6]。根据机器人的运动学数学模型(总体变换矩阵),研究机器人D-H 变换矩阵和结构参数,可以得出机器人各个关节齐次变换的矩阵分别为
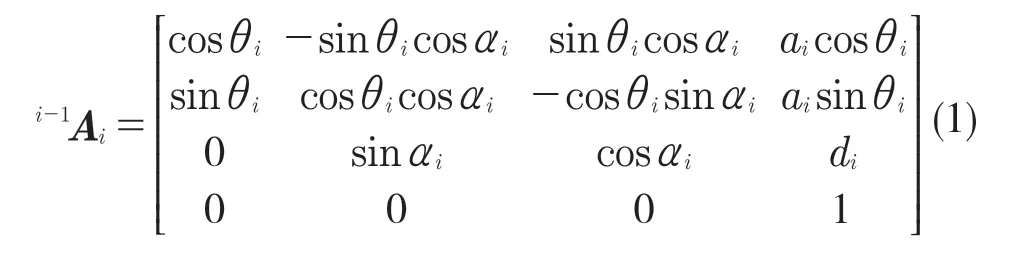
其中,矩阵i-1Ai表示第i 个旋转关节参考于上一个旋转i-1 关节的位姿,则机器人每一个连杆i 相对于基准坐标的末端运动位置即为前面相邻关节齐次变换的乘积。

式中,si表示 sinθi;ci表示cosθi。根据以上算法就可以通过齐次变换进行机器人的运动学求解,从而得到不同角度时机器人的末端位置。
文中采用蒙特卡洛法对研究对象RJQ6-1 的末端工作空间范围进行模拟分析求解,得到的机器人实际运动三维云图如图2 所示。
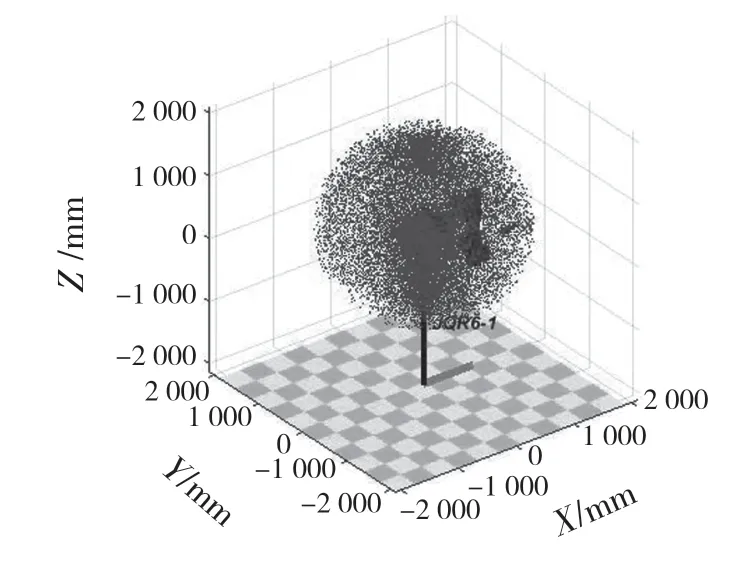
图2 机器人实际运动三维云图Fig.2 Three-dimensional cloud map of actual motion of the robot
2 MATLAB 的轨迹规划和仿真
空间机器人末端执行器的轨迹规划作为机器人的重点研究领域,影响着机器人在实际使用过程中的效力和质量。机器人轨迹规划分为固定点到固定点的运动和连续曲线路径运动,前者只需考虑机器人起点和终点的位置坐标,后者还需指定若干中间点作为机器人的路径[7-9]。首先,根据机器人的D-H 结构参数,使用MATLAB 机器人工具箱,通过工具箱的运动学函数搭建机器人JQR6 的正向运动学仿真模型。通过plot 得到六轴机器人的模型,其中,teach 函数可以显示机器人初始状态的位姿,通过虚拟示教器调节机器人不同运动角度时,可以看出末端执行器的仿真效果[10-12]。
在建立的仿真模型基础上,通过Robotics Toolbox 的jtraj 函数对末端执行器进行两点之间的轨迹规划,并生成5 次多项式曲线。指定机器人末端执行器的起点与终点,起点A(0.3,0,0.5)、终点B(0.5,0.3,0.5)。对于点到点的运动,仿真实际效果如图3 所示。
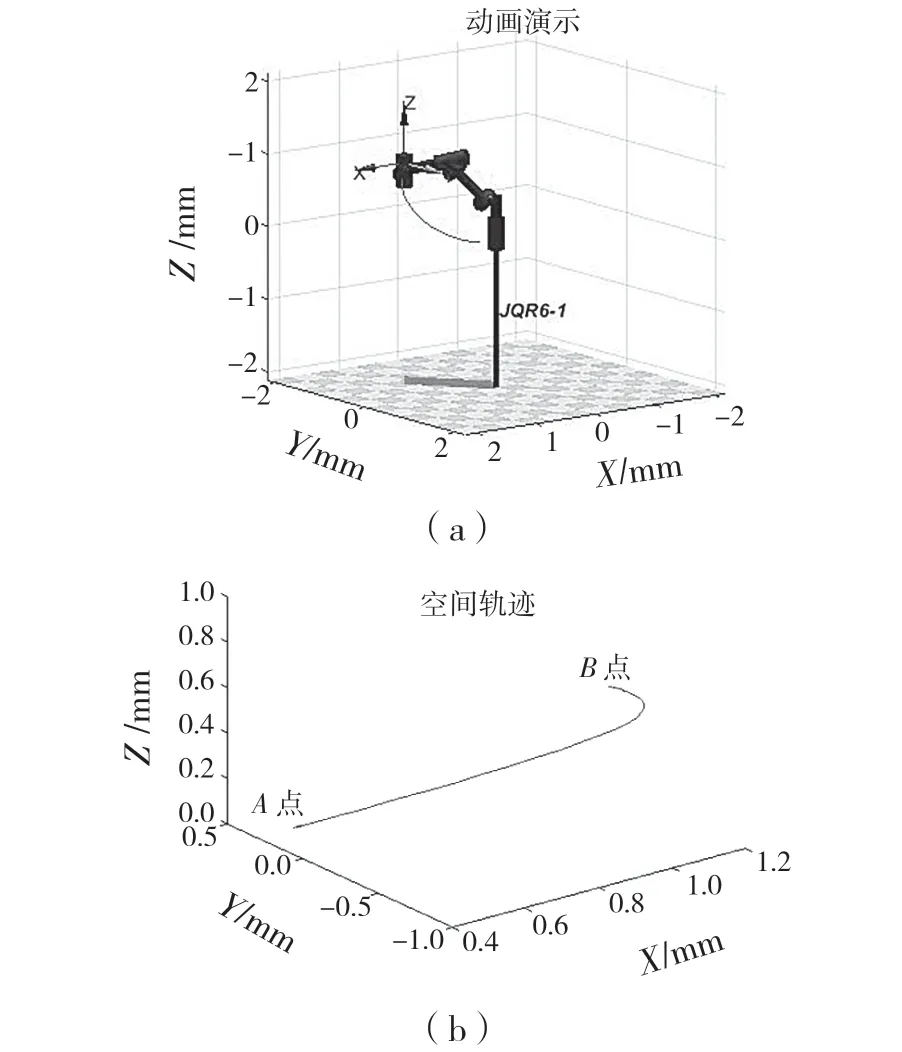
图3 机器人轨迹效果图Fig.3 Robot trajectory effect diagram
由图3 可以明显看出,在给定机器人起点和终点的情况下,可得到一条连续光滑的运动曲线。在Robotics Toolbox 中调用指令调用plot[t,q(:,i)]、plot[t,qd(:,i)]和 plot[t,qdd(:,i)]程序,求解其仿真运动过程中的前面3 个主关节角位移、角速度以及角加速度曲线。对其1~3 关节进行分析,其关节特性参数如图4 所示。
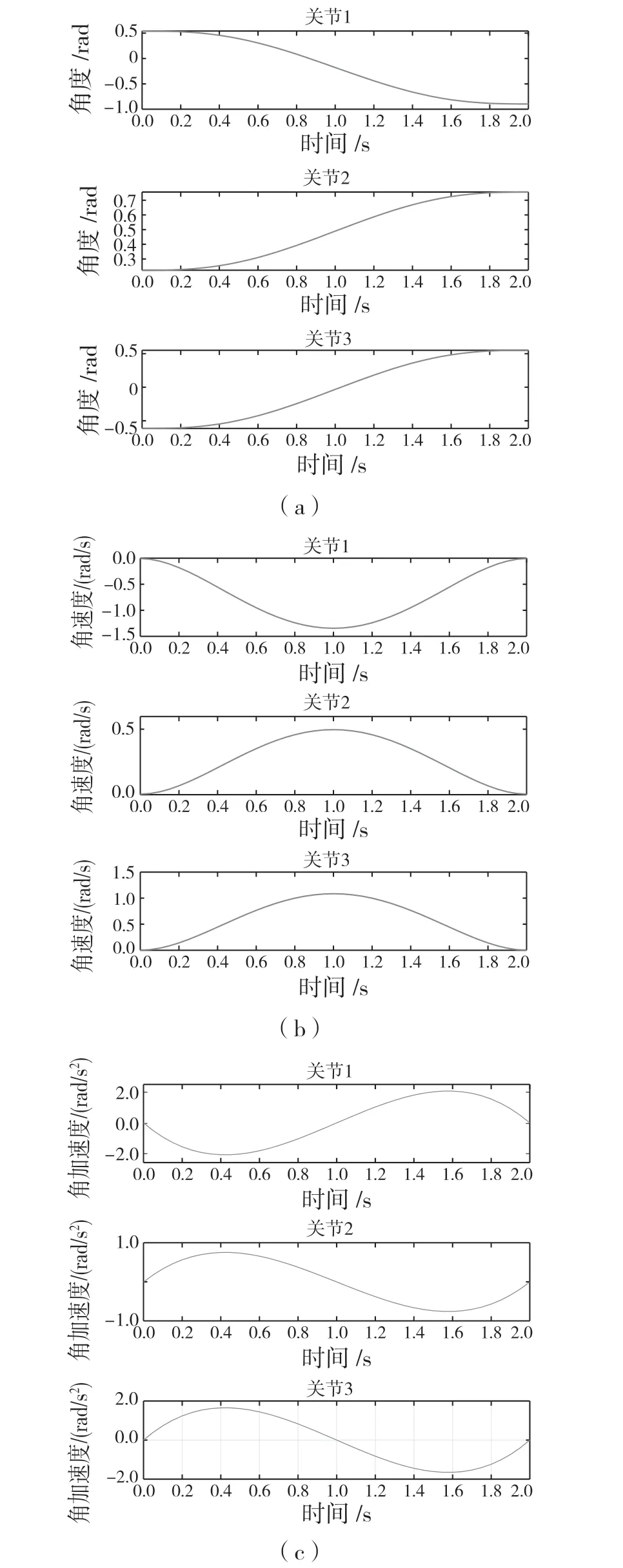
图4 前面3 个主关节角位移和角速度角加速度曲线Fig.4 Angular displacement,angular velocity and angular acceleration curves of the first three main joints
2.2 空间曲线轨迹规划与仿真
机器人末端执行器手腕的空间运动是机器人最普遍的运动状态,串联关节机器人的空间曲线规划也是最基本的研究对象。规定机器人运动曲线的起始点和终止点,并且指定曲线运动中间路径上的一系列不连续的点。利用MATLAB 绘制圆形曲线轨迹,圆的半径为300 mm。
MATLAB 程序如下:
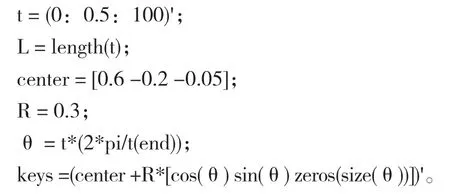
假定圆形轨迹的空间三维模型如图5 所示
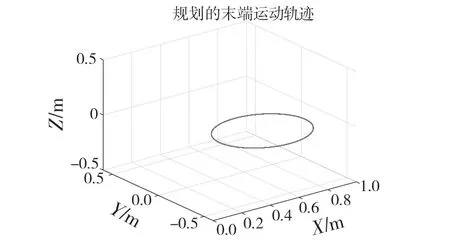
图5 圆形曲线路径Fig.5 Circular curve path
通过循环算法,在曲线上等间隔选取100 个点,进行机器人运动轨迹仿真,仿真效果如图6 所示。由图6 可见,机器人实际运动轨迹和目标规定曲线相同,其中RJQ6-1各关节的角位移曲线如图7所示。
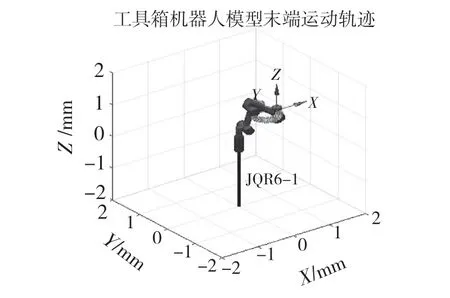
图6 圆形曲线路径效果图Fig.6 Effect diagram of circular curve path
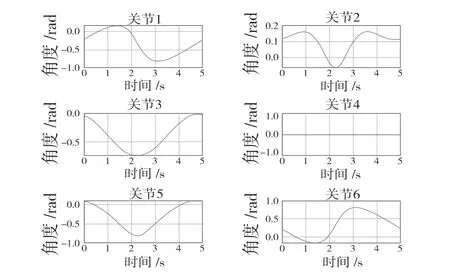
图7 圆形轨迹角位移曲线Fig.7 Angular displacement curve of circular trajectory
从图7 可以清晰地得出结果,机器人各个关节运动连续变化,中间运动过程出现角度突变,说明机器人运动过程平稳。
3 结语
本文根据实验室现有机器人JQR6-1 结构参数,通过MATLAB Robotics Toolbox 工具箱,采用D-H 法建立机器人的运动学模型,进行了机器人运动学正解,通过编程对机器人空间轨迹运动仿真,实现了从固定点到固定点的轨迹规划。机器人运动过程稳定性好,得到整个运动过程中角位移、角速度、加速度运动曲线。通过对空间圆形曲线的轨迹规划,为机器人焊接圆形工件的运动情况提供了理论依据。下一阶段将重点研究机器人轨迹的优化。
