流量反馈型电液比例阀的模糊PID控制特性
2022-11-30丁兆驿赵斌张晓刚郝云晓刘赫
丁兆驿,赵斌,张晓刚,郝云晓,刘赫
(太原理工大学新型传感器与智能控制教育部重点实验室,山西太原 030024)
0 前言
电液比例阀作为液压系统核心元件,能通过改变阀芯位移来连续调节流量,应用于许多机械装备领域。在电液比例阀中,基于位移-流量反馈原理的比例阀具有结构简单、综合性能好的特点[1]。根据流量反馈原理,王松峰等[2]提出一种新型三位四通电液比例阀。这种新型电液比例阀是一种较为复杂的高阶非线性系统,传统的PID控制方案对于非线性系统的控制特性较差[3]。如何改进电液比例阀控制算法,提高电液比例阀的特性,是目前电液比例阀的研究热点和前沿[4]。
针对传统PID算法的智能化改进,目前国内外相关学者已经提出了许多方案[5-6]。其中,基于模糊控制理论的PID改进方案,具有稳定性好且适用于非线性对象的特点[7],被广泛应用于实现各种功能[8-12],可用于比例阀控制系统。
针对一些非线性应用对象,LUO等[13]采用前馈fuzzy-PID来处理非线性的微生物燃料电池系统;ZHU等[14]提出了一种基于非线性动态分析的模糊PID控制方法;彭辉等人[15]采用双模糊算法来补偿液压系统的非对称控制缺陷;MITRA等[16]调整了模糊PID设定值的加权系数。模糊PID控制也被广泛应用于液压阀领域[17-21]。
对此,本文作者采用KAZEMIAN[22]提出的模糊自整定PID参数控制方案,针对该新型电液比例阀设计一套模糊PID控制算法,基于Simulink和SimulationX软件进行联合仿真,验证该算法相比于常规PID控制算法,其稳定性与响应速度均有明显的提升。
1 新型电液比例阀工作原理与控制方案
1.1 工作原理
图1所示为基于位移-流量反馈原理的电液比例阀的结构示意图。
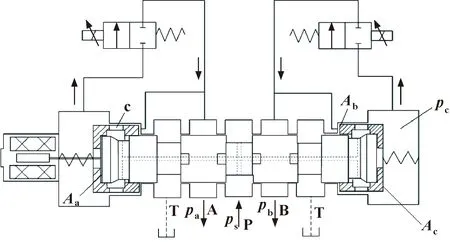
图1 电液比例阀结构示意
电液比例阀先导级由两个二位二通比例阀构成,通过控制先导阀阀芯位移,实现对主阀阀芯位移的控制。与传统三位四通比例阀相比,该阀在主阀阀芯两端增设了带有反馈节流槽c的动阀套。主阀阀芯内部设置有引流油孔,将进油口P的高压油经两端反馈节流槽,分别引入阀芯两端的控制腔。
当两个先导阀均处于关闭状态时,由于动阀套与阀体之间存在一定的预开量,阀芯两端控制腔压力与进油口P压力相等,动阀套在控制腔压力作用下,使主阀阀芯处于中位。当左先导阀开启、右先导阀关闭时,左控制容腔液压油流动,使左侧控制容腔压力降低,低于右侧控制容腔压力,压力差推动阀芯与左侧阀套向左移动,右侧阀套受阀体阶梯限位停止运动。当通过节流槽的流量与经过先导阀的流量相同时,主阀阀芯停止运动,稳定在某一位置,主阀口开口面积也保持不变,从而实现对油液流动方向和流量的控制。当右先导阀开启、左先导阀关闭时,电液比例阀工作原理与上述过程相同,在此不再累赘。
1.2 控制方案
在图1所示的电液比例阀中,反馈节流口的流量qc的公式为
(1)
式中:Cdc为主阀流量系数;Wc为节流槽面积增益;x为主阀阀芯位移;xi为节流槽预开口量;ρ为液压油密度;ps为供油压力;pc为控制容腔压力。
先导阀流量qy公式为
(2)
式中:Cdy为先导阀流量系数;Wy为先导阀阀芯面积增益;y为先导阀阀芯位移;pb为B口压力。
控制腔的流量连续性方程为
(3)
式中:Ac为阀套端面面积;Cc为液容。
当通过反馈节流槽的流量与先导阀流量相同时,先导阀阀芯位移与主阀阀芯位移关系为
(4)
式中:Cdc为液容;Aa为主阀阀芯端面面积;Ab为阀套环形端面积。
主阀流量qx公式为
(5)
式中:Cdx为主阀流量系数;Wx为主阀阀芯面积增益。
电液比例阀流量qv公式为
(6)
通过上述分析可知,电液比例阀主阀阀芯位移、流量与先导阀阀芯位移、流量成一定比例关系。通过调节先导阀阀芯位移,便可近似成比例地调节主阀阀芯位移。根据电液比例阀运行原理,提出如图2所示的基于位移-流量反馈原理的电液比例阀控制框图。
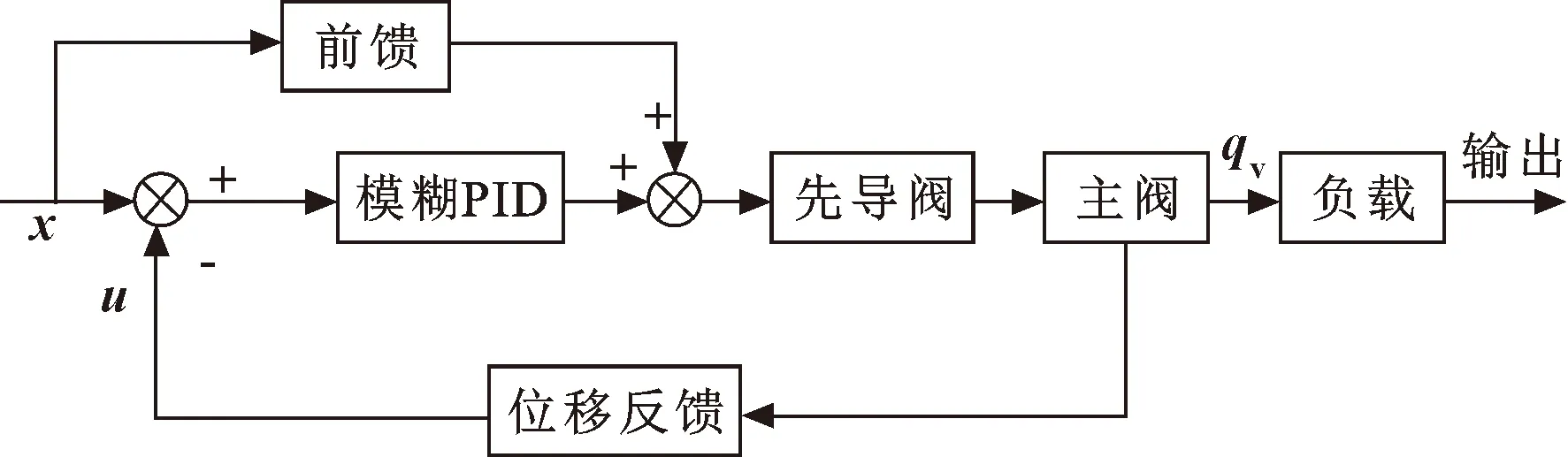
图2 电液比例阀控制框图
在提出的控制方案中,根据主阀阀芯位移与先导阀阀芯位移比例关系,主阀阀芯位移控制信号通过比例换算,得到相应的先导阀阀芯位移控制信号,通过前馈方式,开环控制先导阀阀芯位移,使主阀阀芯位移基本达到设定的主阀阀芯位移。同时,采用模糊PID控制器,根据主阀阀芯位移反馈信号与控制信号之差,产生闭环调节信号,补偿前馈控制信号,实现主阀阀芯位移闭环稳定调控,改善电液比例阀的控制性能。
2 模糊自整定PID设计
根据PID工作原理与改进需求,设计一种两输入三输出的基于模糊控制原理自整定PID控制器,其原理如图3所示。该模糊PID控制器根据输入的误差值e和误差值变化率ec这两个输入量,经过模糊化处理,通过模糊规则表得出对应的输出量比例因数变化量ΔKp、积分因数变化量ΔKi和微分因数变化量ΔKd,使PID 3个参数可根据电液比例阀状态变化不断进行自我调整,改善控制效果。
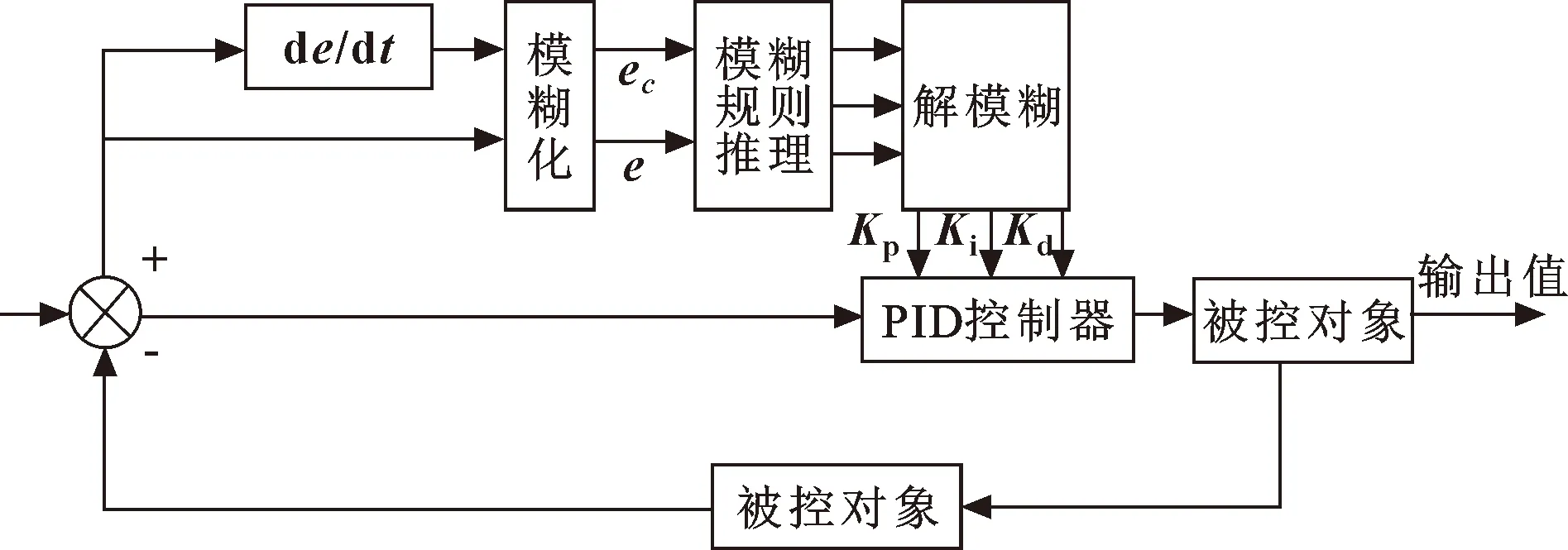
图3 模糊自整定PID控制器原理
根据电液比例阀工作特点及大量仿真结果,模糊控制算法将输入的误差值e和误差值变化率ec,以及输出量比例因数变化量ΔKp、积分因数变化量ΔKi和微分因数变化量ΔKd在各自的论域内分成7个模糊语言集合部分,按照负大(NL)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PL)的顺序进行输入输出的语言值分配。2个输入值的论域规定为[-6,6],3个输出值的论域规定为[-1,1]。
根据工程上的实际应用情况与仿真结果,推理采用mamdani法,解模糊法采用重心法。输入值e隶属度函数图像如图4所示,采用梯形函数与三角形函数结合的隶属度函数,当偏差值较大时,采用取值范围较大的梯形函数来大幅度调节PID参数,当偏差值较小时,采用灵敏度高且范围小的三角形函数,对PID参数进行精密调整。ec对精度要求较高,所以全部采用三角形隶属函数,如图5所示。输出值ΔKp,ΔKi和ΔKd的隶属度函数则采用三角形函数与平滑无零点的高斯函数组成,如图6所示。
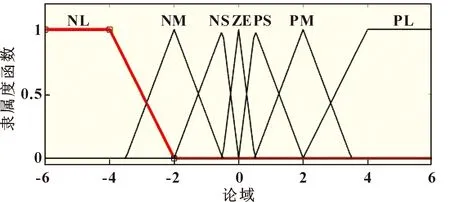
图4 e的隶属度函数
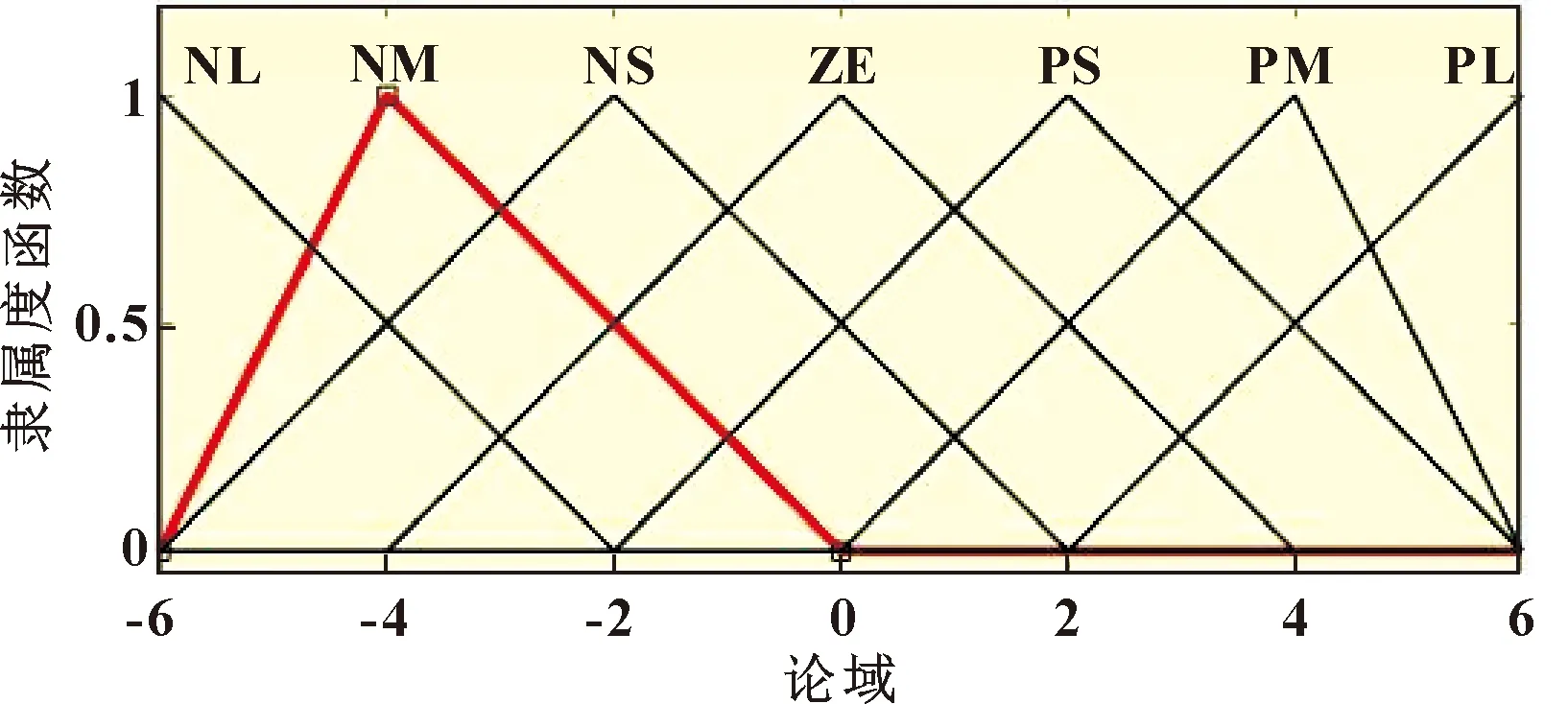
图5 ec的隶属度函数

图6 Kp、Ki和Kd的隶属度函数
模糊控制规则表是模糊控制的核心,结合仿真结果与实际应用需求,对ΔKp、ΔKi和ΔKd的参数整定规则大致如下:
(1)当差值e的绝对值相对较大时,为提高被控对象的相应速度,需要大幅度提高或降低ΔKp,此时,若偏差变化率ec较大,系统有时会因为Ki值过大,出现大幅度超调和积分饱和现象,此时应取ΔKi极小值,与此同时,为避免微分饱和现象的发生,应取较小的ΔKd;当偏差变化率ec较小时,需尽快稳定系统以及降低稳态误差,稍微提高ΔKi,ΔKd维持不变;
(2)当差值e的绝对值适中时,需降低系统的超调现象,ΔKp稍微降低,取中等值,此时ΔKd的取值的影响较大,所以ΔKd的值要适中,以保证系统的响应速度;当偏差变化率ec较大时,可增加一些积分对控制的作用,ΔKi取大值;当偏差变化率ec较小时,为防止积分饱和,ΔKi取较小值;
(3)当差值e的绝对值较小时,为提高系统的响应速度与精度,ΔKp、ΔKi取较大值,同时为抑制系统扰动兼调节时间补偿,一般情况下,当ec的值较小时,ΔKd可取大些,反之则应降低。
根据以上指导原则,设定模糊自整定PID的ΔKp、ΔKi和ΔKd的模糊规则分别如表1、表2、表3所示。
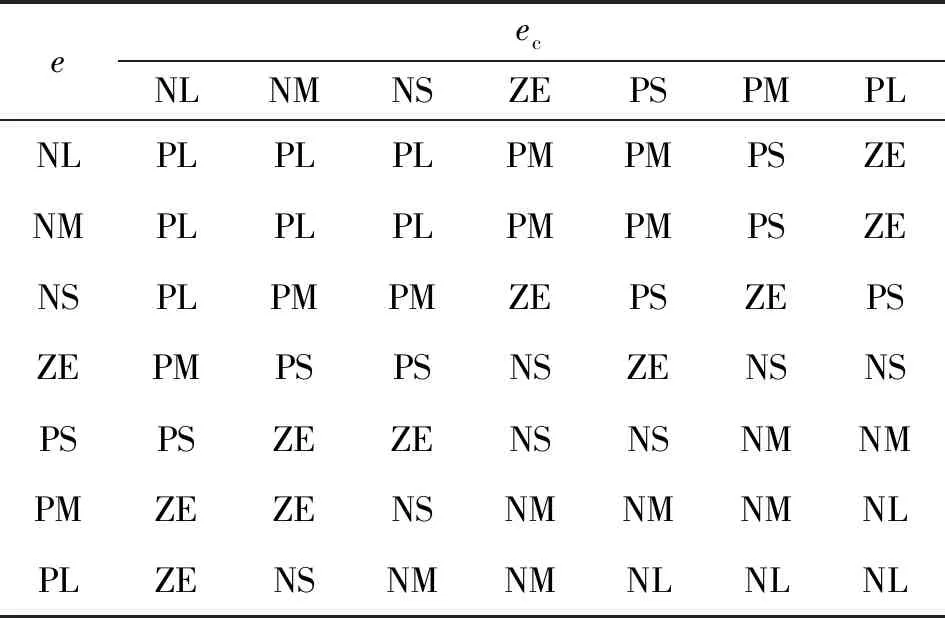
表1 ΔKp规则
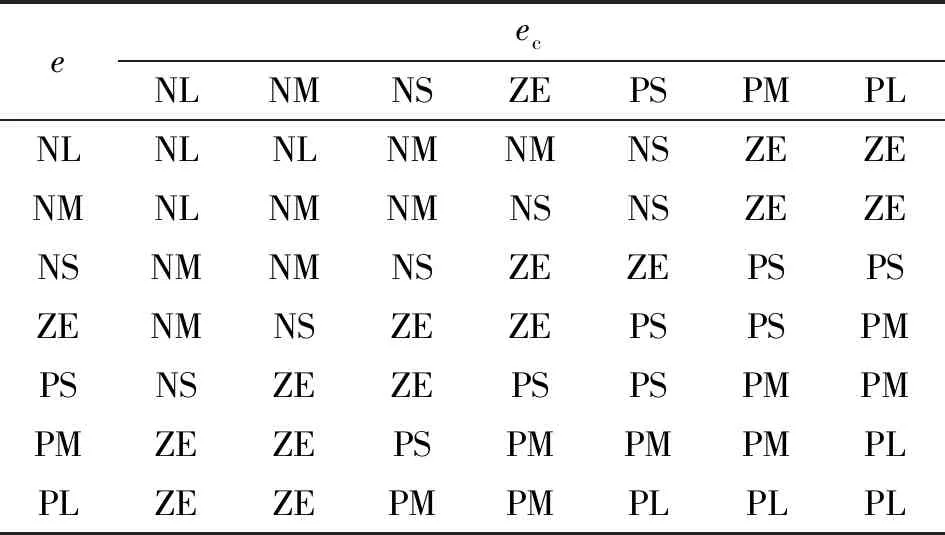
表2 ΔKi规则
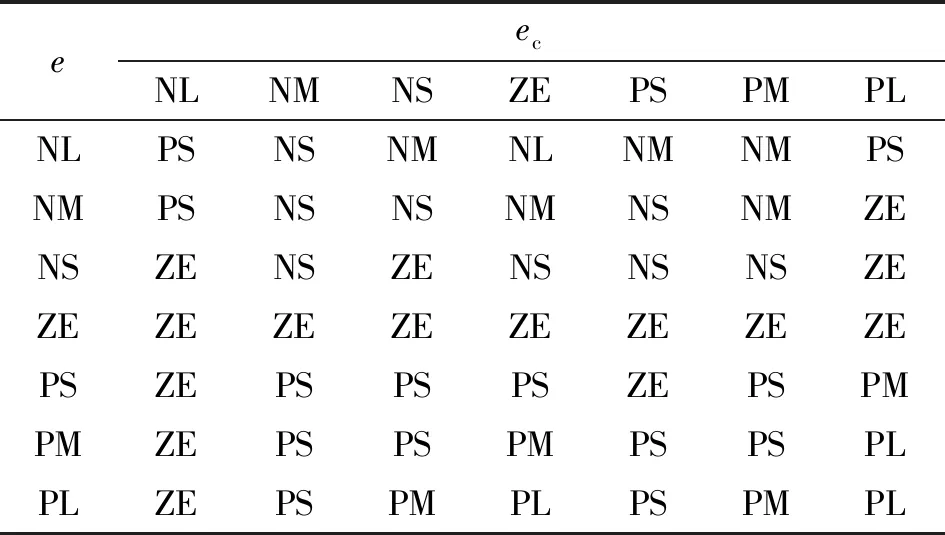
表3 ΔKd规则
3 仿真分析
3.1 仿真模型
SimulationX是一款基于Modelica语言的系统工程建模仿真软件,在研究中,采用SimulationX软件,对电液比例阀的液压、机械部分进行仿真模型建立,如图7所示,主要包括信号处理、先导阀、主阀、模拟负载与动力源部分。先导阀与主阀的模型均用质量-阻尼-弹簧的形式进行建模,主阀阀芯与动阀套选取液压库的运动活塞模块实现液压与机械环节的耦合。负载模拟部分采用节流阀,通过改变节流阀开度,调整电液比例阀阀口压差。
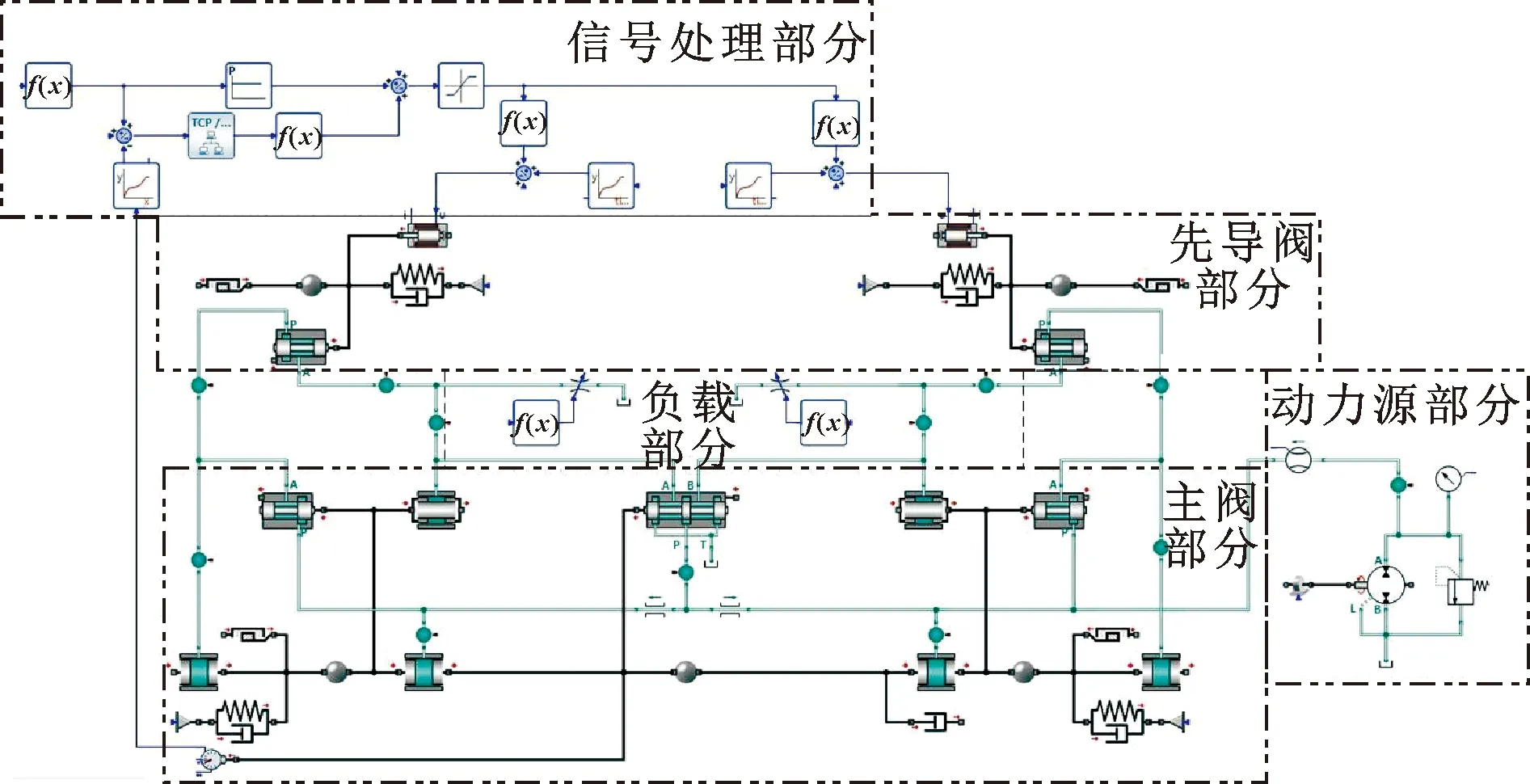
图7 新型电液比例阀SimulationX建模
同时,SimulationX带有与MATLAB进行数据传输的接口模块,可实现SimulationX与Simulink软件联合仿真[23]。因此,在Simulink中进行模糊自整定PID控制系统的整体设计与建模,如图8所示。
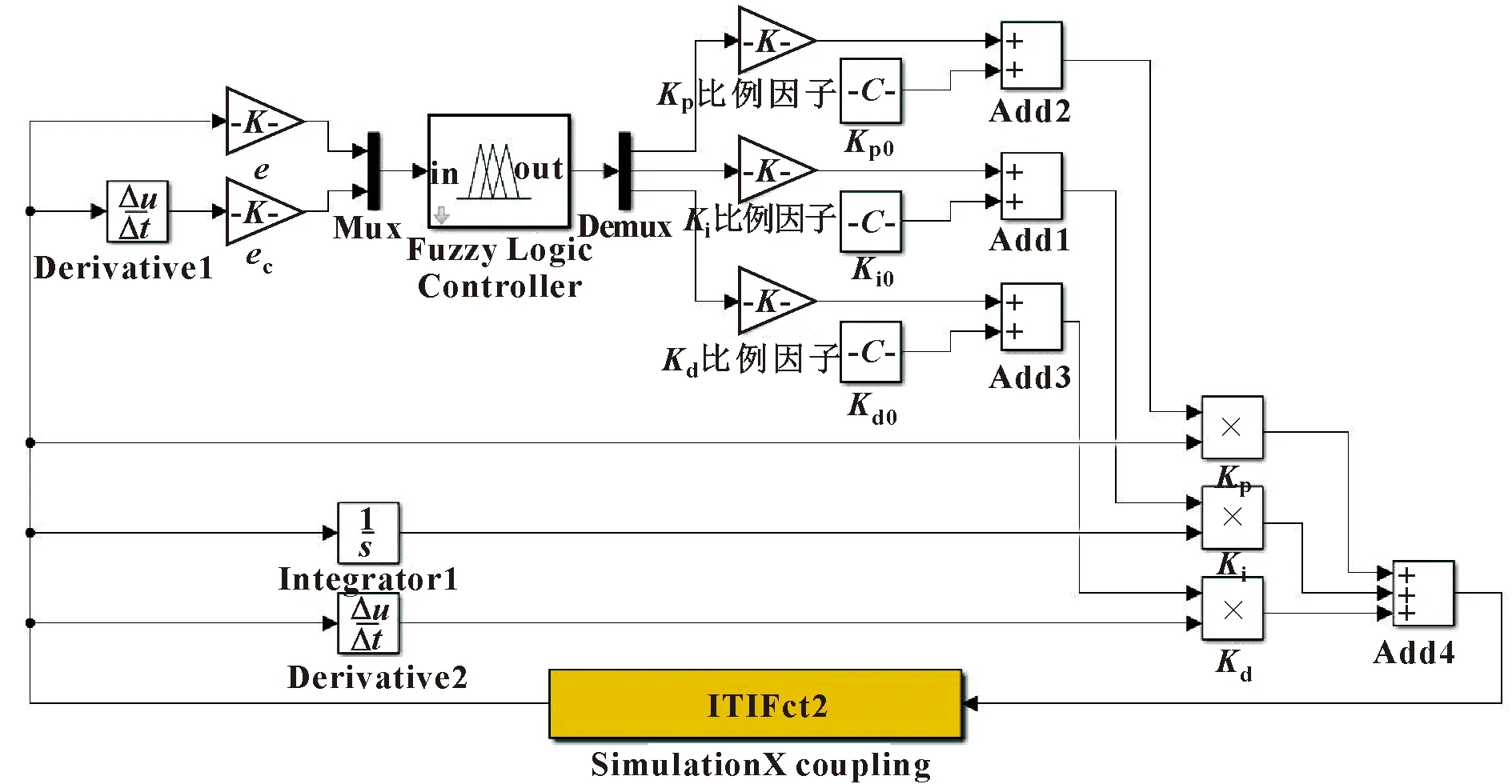
图8 模糊自整定PID仿真模型
图9所示为两个软件的联合仿真示意图。在SimulationX液压模型中设置TCP/IP模块,实现Simulation与Simulink软件信号传递,实现电液比例阀联合仿真。
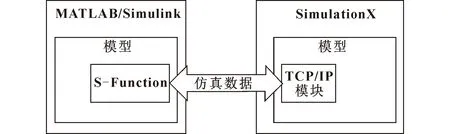
图9 SimulationX与Simulink联合仿真原理示意
3.2 仿真结果
根据电液比例阀结构参数,将传统PID控制器参数分别设置为比例因数Kp=10.32、积分因数Ki=1.53、微分因数Kd=0.008。模糊算法具有稳定性强的特点,所以初始比例因数Kp0可以取更大的值而不会导致阀芯位移振荡。采用模糊自整定PID控制器时,初始比例因数Kp0=14.2、积分因数Ki0=1.28、微分因数Kd0=0.033。
图10所示为电液比例阀阀芯位移、流量随控制信号变化曲线。在仿真过程中,调整负载节流阀阀口开度,使电液比例阀主阀压降保持恒定,调节控制信号连续变化。由图10可知:主阀阀芯位移与控制信号基本呈线性关系。由于反馈节流槽预开口量的影响,主阀流量存在一小段较为明显的死区,可通过设置零位偏置,减小电液比例阀死区的影响。
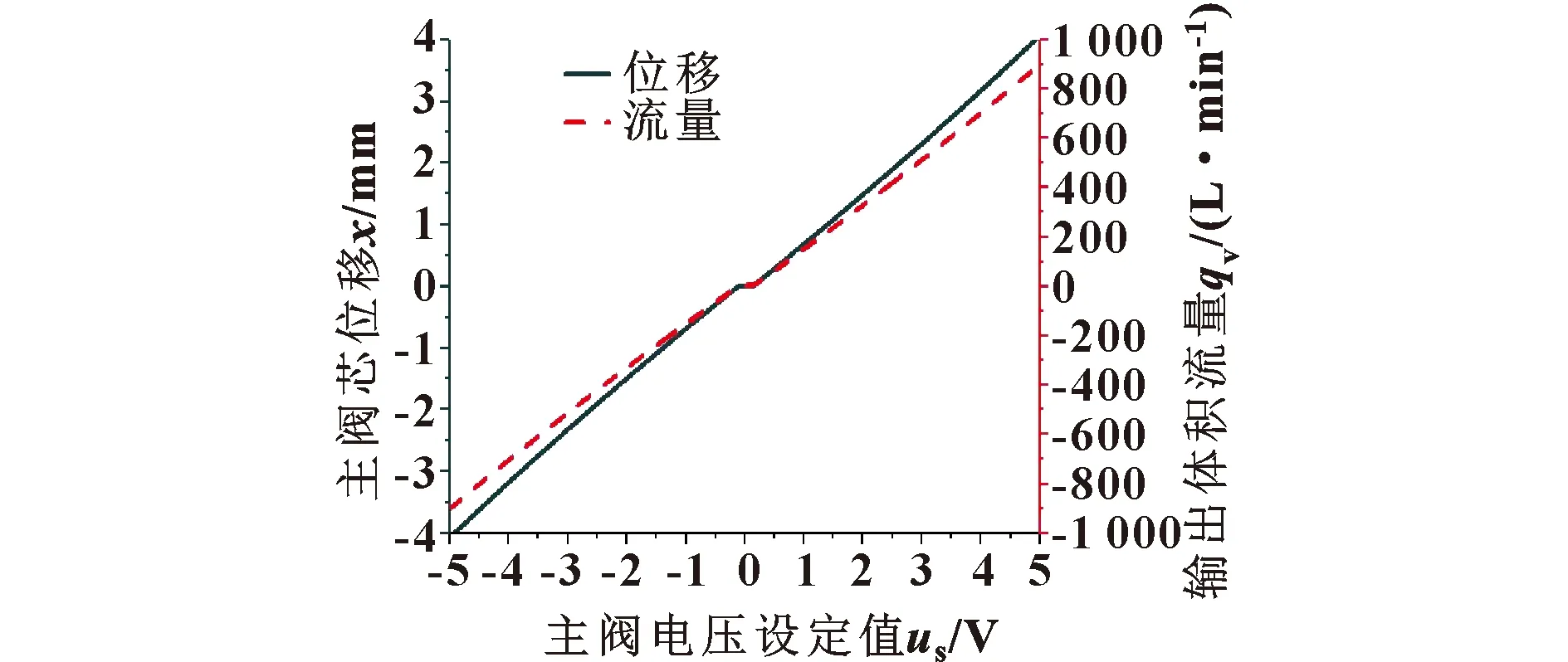
图10 模糊控制下阀稳态控制特性仿真曲线
仿真过程中,给定相关的位移信号,连续调整电液比例阀主阀压降,获得如图11所示的20%、60%和100%的阀芯位移与流量特性曲线。由图11(a)可知:给定位移信号之后,随着电液比例阀阀口压降的增大,采用所设计的模糊控制器,电液比例阀阀芯位移基本不受压差变化影响,具有良好的等位移控制特性。由图11(b)可知:电液比例阀流量随阀口压降的增大逐渐增大,其曲线顺滑,说明具有较好的流量刚性。
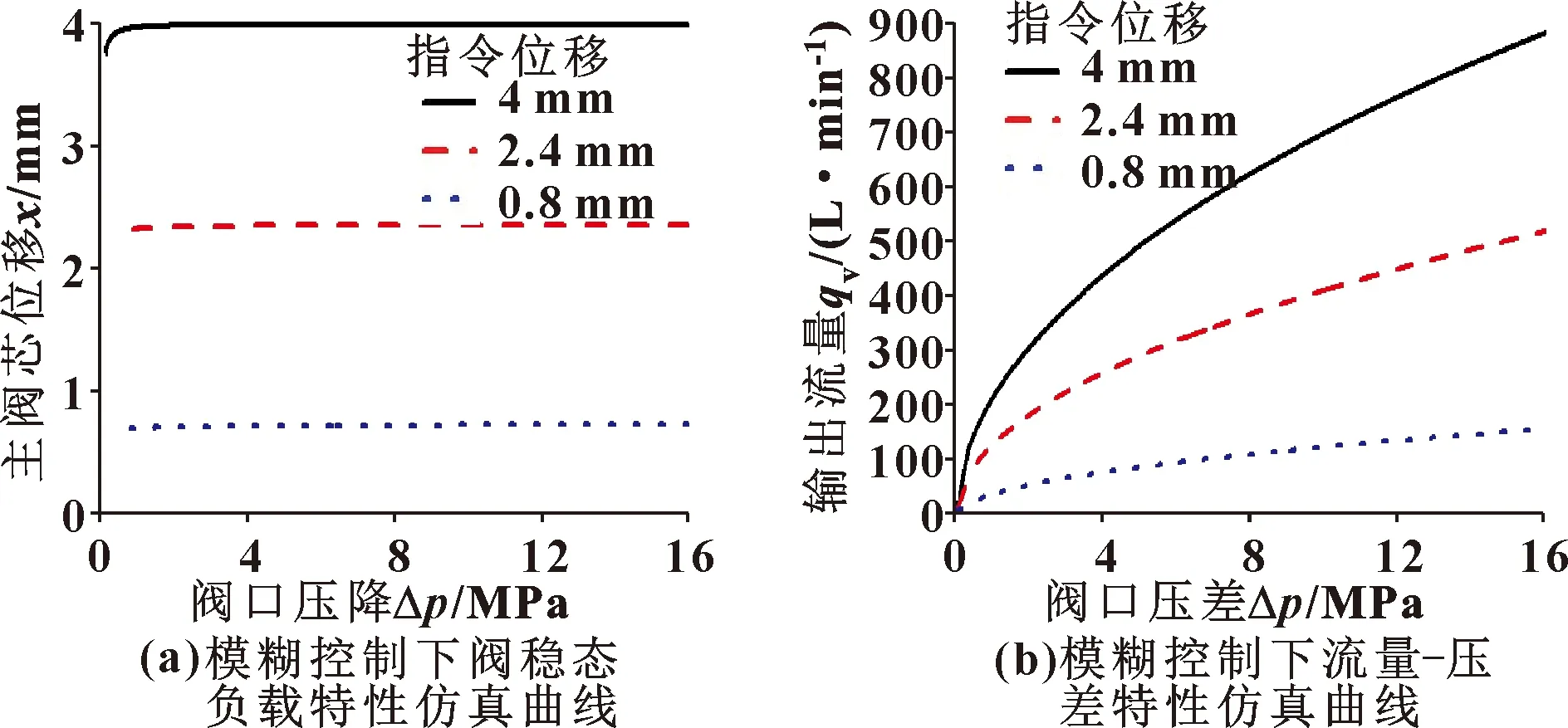
图11 电液比例阀阀芯位移与流量特性曲线
仿真过程中,给定电液比例阀阀芯位移阶跃控制信号,获得如图12(a)(b)所示的仿真结果。可知:针对该阀,虽然在初始响应速度上模糊PID与普通PID基本一样,但相比普通PID,模糊PID更为稳定,且几乎没有超调现象,整体表现良好。针对80%、60%、40%、20%幅值的阶跃信号输入的仿真结果如图12(c)所示。可以看到:在低负载状况下,该模糊PID依然有着良好的表现。
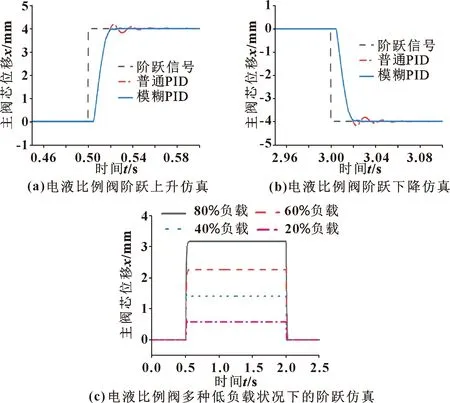
图12 电液比例阀的阶跃仿真
此外,在仿真过程中,给定电液比例阀阀芯位移4 mm、频率1 Hz的正弦控制信号,获得如图13所示仿真结果。可知:针对该阀,采用模糊PID的跟踪误差比普通PID少0.03 mm,最大延迟时间比普通PID下降5 ms,且基本不存在失真现象,说明该模糊PID控制器针对正弦信号具有良好的跟踪效果。

图13 电液比例阀的正弦信号仿真
4 结论
采用位移流量反馈原理的新型电液电液比例阀具有优良的动静态性能,但因为它具有的非线性,采用常规的PID控制系统难以获得良好的控制性能。因此,本文作者设计了一种基于模糊控制原理的自整定PID控制器,并在SimultionX中建立了先导阀与该新型电液比例阀的模型,在Simulink建立了模糊PID模型;利用两软件进行联合仿真。结果表明:该新型电液电液比例阀虽然在初始响应速度上没有优势,但模糊PID的稳定性表现仍然优于普通PID,且提高了该新型阀的整体动态性能。
