基于扩展合同网协议的有人机/无人机任务协同方法
2022-11-29陈宣霏周兴社
陈宣霏,沈 博,张 凡,杨 刚,周兴社
(西北工业大学计算机学院,西安 710129)
1 引 言
从近些年无人机在战场上的实战情况来看,无人机已经显现出独特的优势[1-2]。其特点是可以担负在复杂环境下执行特殊作战任务,与有人机相比成本较低、具有较高的性价比,可以有效地避免人员伤亡。随着无人机自主能力的提升,一些问题也随之出现。无人机自主能力的增强可能会导致更高的系统复杂性,因此引发更多的事故。无人机自主能力需要监督,不能违背伦理道德。同时,由于传统战场态势的不确定性和动态性,多无人机作战存在战场态势延迟、实时性不高的情况。有人机能够灵活应对战场的态势改变,及时处理一系列突发情况,协助无人机进行战术决策,并实现战场态势实时监测。基于上述原因,在未来较长时间内,有人机与无人机之间应是相互补充的关系。如何实现有人机与无人机的协同作战成为十分重要而又具有挑战性的问题[3-6]。
近年来,对于协同作战的任务分配问题的求解,有博弈论、线性规划、遗传算法和蚁群算法等方法。姚宗信等[7]根据多机协同对抗多目标的空战特征,以敌我双方可能的相互攻击组合方式为策略集,由敌我双方对抗态势分析定量结果确定支付函数,建立完全信息静态博弈模型。通过求解博弈模型的混合策略纳什均衡解,并结合一定作战经验,形成任务决策方法。Darrah等[8]扩展了使用混合整数线性规划(MILP)的已有研究,通过添加重要的新假设来分析任务分配问题的复杂性,在抑制敌方防空(SEAD)任务中有效地分配车辆。Shima等[9]针对多个目标执行多项任务分配协作无人机问题,提出了一种基于遗传算法的解决方案。寇英信等[10]运用信息熵方法,结合主客观两方面的因素对多目标攻击条件下的任务进行优先权分析,建立传感器作用于任务的效能矩阵,在此基础上运用蚁群算法确定任务最优分配方案。上述解决方案均引入了大量的运算。合同网协议(CNP)算法是由学者 Smith[11]提出并应用到了任务分配领域。国内外学者基于合同网协议针对有人/无人机任务协同协商问题进行了研究。Li等[12]针对战场环境中情报获取的不确定性和波动性对协同任务分配的影响,提出了一种不确定环境下有人/无人机的协同任务分配方法,用合同网协议对遗传算法进行改进,并对其进行求解。刘宏强等[13]采用合同网协议研究有人/无人机的任务分配问题,通过对合同网协议的改进,实现对时序约束任务进行处理。刘跃峰等[14]以合同网协议和多智能体系统(MAS)理论为基础,建立了有人机/无人机任务分配模型。王然然等[15]以分布式合同网拍卖算法为基础,构建无人机集群任务拍卖架构与拍卖收益函数,结合模拟退火算法协调任务执行次序,采用A*算法完成两任务点间的航程预估,在任务分配阶段同步完成多无人机间协同航路的初规划,确定最佳任务执行次序,实现任务分配与协同航路规划的紧耦合。
然而,传统合同网协议在解决有人机/无人机协同时具有不足之处。
(1)传统合同网协议没有限制投标者的数量,可能出现投标者能力不足但仍会被分配到任务的情况,这就可能造成中标的投标者没有能力去完成任务。同时,因为传统合同网采取广播的形式招标,所以不限制投标者的数量会增加通信负担[16]。
(2)传统合同网协议执行的都是离线任务,即招标者将任务分配之后就结束整个过程,不关注中标者是否能完成任务,任务是否会有变化,任务是否被完成,未针对任务分配之后战场态势的突然变化考虑相应的协同对策,缺乏实时性。
有人机/无人机的任务协同是有人机/无人机相关研究中具有挑战性的问题。首先,任务协同中的任务分配问题是一个多目标优化问题,计算难度大。其次,由于无人机传感器、自身载荷和能力的不同,能够完成的任务类型也不同,所以多无人机的任务协同需要解决异构多无人机任务协同问题。最后,针对战场复杂多变的情况,有人机/无人机任务协同模型需要满足一定的实时性,仅进行离线任务分配已经不足以抵抗复杂多变的战场态势。
基于以上,本文将无人机视为有一定自主决策能力的智能体,考虑有人机/无人机任务协同过程中战场态势及无人机状态的变化,从静态任务协同、动态任务协同、战场实时执行状态反馈三个方面,考虑无人机的能力,对合同网协议进行扩展,建立有人机/无人机任务协同模型,以提高有人机/无人机任务协同的实时性和高效性。
2 基于扩展合同网协议的有人机/无人机任务协同方法
2.1 有人机/无人机任务协同过程
2.1.1 静态任务分配
静态任务的分配是指有人机/无人机编队在出发之前,便由有人机根据能力、任务执行时间以及任务负载,将目前的任务分配给合适的无人机。若无人机能力不够,就由有人机执行。任务分配完之后再出发到战场。
2.1.2 战场实时执行状态反馈
(1)战场实时执行状态反馈是指有人机/无人机编队在任务执行过程中,由有人机实时监测战场态势以及无人机的状态,并对战场态势及无人机状态的变化及时做出处理或决策,以达到完成任务的目的。根据监测对象的不同,可将战场实时执行状态反馈分为无人机实时执行状态反馈和任务实时状态反馈。根据有人机监测方式的不同,可将战场实时执行状态反馈分为主动反馈及查询反馈。
(2)无人机实时执行状态反馈是指无人机在任务执行过程中,有人机总是能及时地获得关于无人机的各类信息。根据无人机的状态,可将无人机实时执行状态反馈分为两类。①无人机主动将战场态势反馈给有人机。无人机在任务执行过程中每过一段时间就主动将自己的状态信息返回给有人机。②无人机如因故障等不能主动反馈,则由有人机查询反馈无人机状态,并根据无人机的状态的改变做出相应决策。
(3)任务实时状态反馈是指有人机查询反馈任务的状态。
2.1.3 动态任务分配
动态任务分配是指根据战场实时执行状态反馈的信息可能会引发的任务重分配,具体包括以下三种情况。
(1)执行过程中出现了新的任务,由有人机接管并进行任务重分配。
(2)无人机因某些原因(能力不足或故障等)不能继续完成任务,由有人机接管进行任务重分配。
(3)已分配的任务移动或变化,由有人机接管进行任务重分配。
基于以上所述,本文所描述的有人机/无人机任务协同问题是一个分布式协商问题,且具有实时性,所以选用合同网协议并进行改进,构建有人机/无人机任务协同模型。
本文的有人机/无人机任务协同模型将区别于多无人机任务协同模型,采用集中式任务分配的模式,同时考虑到实际战场状况。有人机在无人机能力不足的情况是可以执行任务的,所以在本文中将有人机视为任务的招标者,有人机或无人机作为任务的投标者和中标者以及执行者。
2.2 基于传统合同网协议的扩展
2.2.1 建立投标库
在每一个任务招标时,有人机根据无人机的能力和各自对应的任务负载建立投标库,将有能力且任务负载不高的无人机加入投标库,作为本轮可以参与投标的无人机,以此来减少通信量,同时也保证了被分配了该任务的无人机有能力完成该任务。
2.2.2 增加有人机/无人机“握手保持”
增加有人机/无人机“握手保持”来实现任务实时执行状态反馈,从而考虑对引发的任务重分配的处理。对于有人机对战场态势的监测,根据对象的不同,分为两种情况:一是无人机执行任务状态反馈,二是任务状态反馈,这里主要考虑任务区域或坐标点的变化。而无人机执行任务状态反馈又可分为两种方式:一是主动反馈,无人机主动进行任务执行状态反馈;二是查询反馈,无人机的任务执行状态通过有人机查询的方式被动地被有人机获得。这里设置一个有人机与无人机握手保持的时间阈值,如果有人机距离上一次该无人机主动进行任务执行状态反馈的时间超过了该无人机设置的时间阈值,就进行查询反馈,以便能实时地掌握战场态势。
有人机发现新任务,通过“招标-投标-中标”过程完成对任务的分配,中标者是执行该任务获得的整体综合效能最大的无人机或者是无人机能力不足以完成任务,协助完成任务的有人机。任务分配的整体综合效能主要考虑能力匹配原则、任务最小完成时间原则、任务负载均衡原则。
2.3 基于扩展合同网协议的有人机/无人机任务协同过程
为了确保分配到的任务尽可能都能完成,本文对于传统合同网协议步骤1进行改进如下。
步骤1:建立投标库
在任务发布之前,有人机根据任务所需能力对无人机进行能力评估,对于有能力完成该任务的无人机建立一个投标库。
步骤2:任务发布
有人机根据步骤1建立的投标库对投标库里的无人机组广播任务信息,以确保中标的无人机有能力完成该任务。
步骤3:投标
投标库里的无人机收到任务信息之后计算完成该项任务所需要花费的成本,并有完成这项任务的意愿,就向有人机投标。
步骤4:中标
任务发布后,有人机将会进入等待状态,且在此期间会持续收集并记录无人机发送过来的标书。当收到投标库里所有无人机的投标信息后,或任务投标日期截止,有人机将停止接收标书。然后收集的所有标书信息进行综合评估,从中选择出最合适的无人机,并将任务信息发送给该无人机。若没有可以完成该任务的无人机,该任务则由有人机执行。
步骤5:执行任务
无人机或有人机收到中标的消息后会给有人机反馈一个任务确认的信息。自此,该任务就分配完成,将该任务加入到对无人机或有人机的任务执行队列里。如果无人机或有人机后续不能完成任务,则向有人机发出取消任务的信息,然后任务分配将会回到步骤 4,有人机将会进行新一轮的招标过程。
为了有人机能实时监测战场态势以及无人机的状态等各种突发任务,提高有人机/无人机任务协同的高效性和实时性,本文对合同网协议进行了如下扩展。
步骤6:握手保持
有人机将任务分配给无人机后,无人机便会定期向有人机反馈自己的状态以及任务的执行状态。若无人机在设定的时间范围内没有向有人机进行任务反馈,有人机便主动进行查询,并对此刻无人机状态及任务执行状态的改变做出实时性的决策,进行任务重分配,以便保证任务的完成。合同网扩展步骤图如图1所示。
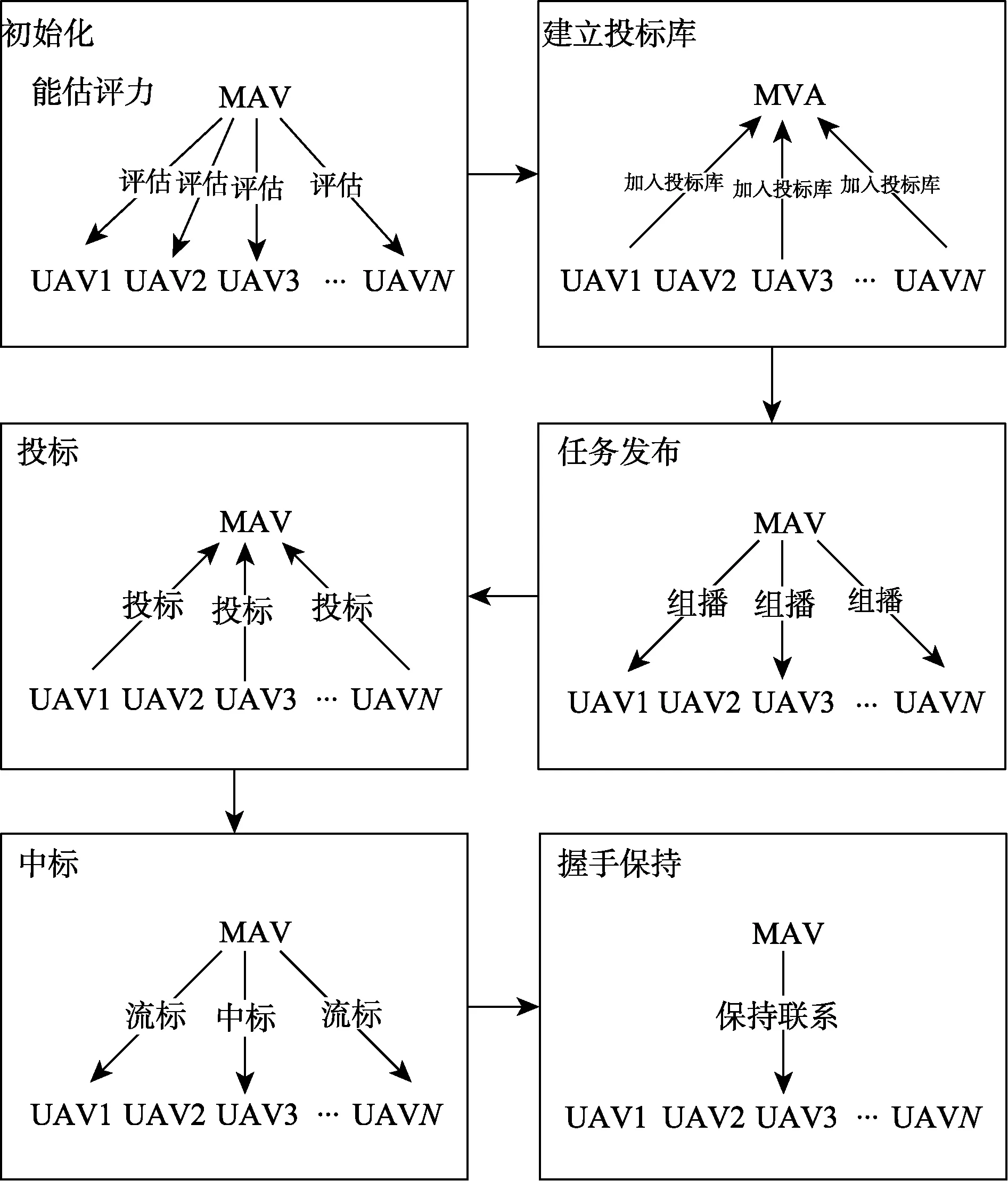
图1 合同网扩展步骤图Fig.1 Contract network extension step diagram
本文的任务协同模式为串行,是对任务的顺序分配,相较于并行,因本文的协同模式考虑节点能力的因素,并根据能力实时地进行任务协同,而并行则存在某次任务协同所得到的节点的能力不是最新状态的能力,从而导致任务分配出错或失败的情况。所以综合考虑本文是在任务顺序分配的前提下进行的。
具体任务协同过程如图2所示。
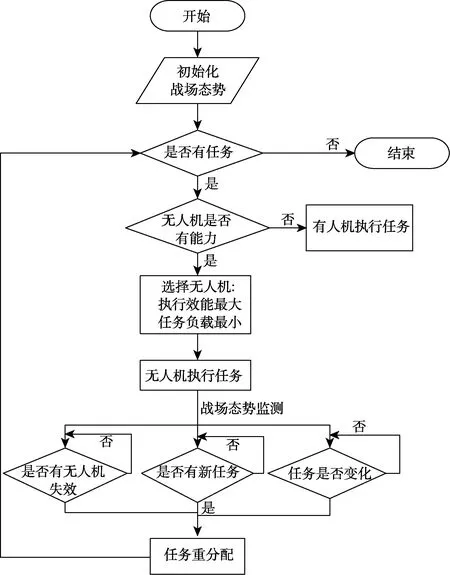
图2 有人机/无人机任务协同过程图Fig.2 MAV/UAV task collaborative process diagram
该任务协同过程图将每一个任务都看作是不同时期的一个新任务,所以再分配完第一个任务之后,如果战场态势检测时发现还有未分配的任务,则继续任务分配,该任务分配图为整个任务协同过程的分配图。
3 基于扩展合同网协议的有人机/无人机任务协同模型
3.1 任务协同建模
因本文中,有人机与无人机都有参加任务的可能,所以将本文中的有人机和无人机抽象为一个Role_node节点,根据节点的类型来判断是有人机还是无人机。本文针对一架有人机与多架无人机组成的任务编队,执行侦察或攻击等任务,进行任务协同研究。假设当前有N个节点,其中包含一架有人机和N-1架无人机,将M个子任务分配给这N个节点,节点集合记为Role_nodei={Role_node1,Role_node2, ···,Role_noden}, 1≤i≤N,任务集合为targetj={target1,target2,···,targetm},1≤j≤M。构建任务分配矩阵N×M Dis

式中,Role_nodej={id,type,team_id,homePos,state,ability,value,task_queue},id表示每个节点的唯一标识,type表示节点类型,type∈ {MAV,UAV},MAV表示有人机,UAV表示无人机。team_id表示节点所在的team,homePos={x,y},表示节点的起始位置,是节点的起始坐标点。state表示节点的工作状态,空闲、执行任务中或失效等,ability会根据节点的角色,有不同权重的能力描述,0表示没有该能力,1表示该能力最强,value表示节点的价值,taskqueue={target1,target3,…} 是分配的任务队列。targetj={id,tag,ability_need,priority,reward,threat,state,is_change},id表示每个任务的唯一标识,tag标记任务类型,比如攻击任务还是侦察任务等,ability_need表示该任务的能力需求,0表示没有该能力的需求,1表示需要该能力且需求度最大。priority代表任务优先级,reward表示任务完成价值,threat表示任务威胁,state代表任务状态已完成还是未分配、已分配,is_change说明任务是否产生变化,比如面任务区域是否有扩大或缩小,点任务是否改变坐标位置。
3.2 任务协同效能函数构建
3.2.1 任务完成收益函数
任务完成收益是根据任务价值和优先级决定的。任务的价值会根据优先级增长,越紧急的任务,完成之后的收益越高。

3.2.2 任务执行损失函数
任务执行损失包括任务威胁损失、节点航迹代价和节点消耗代价三部分。
(1)任务威胁损失函数
任务威胁损失是指分配到任务的节点在完成该任务时,会因为任务的威胁能力造成自身有一些损失。是根据节点的价值和任务的威胁能力决定的。

(2)节点航迹代价函数
节点航迹代价是指被分配任务的节点在执行任务过程中飞往任务的代价消耗。
式中,len(rangeij)是节点飞往任务的距离,V(Rolenodei)是节点的速度。
(3)节点消耗代价
节点消耗代价是指节点在完成所分配任务时所会消耗的能力。

任务执行损失:

3.2.3 节点任务负载
在任务分配过程中,对于将任务分配给哪一个,本文考虑将节点任务负载考虑进去,以便能更好地达到任务分配的全局最优。
单个节点的任务负载为:Nodeload(Role_nodei),所有节点平均负载为

式中,M为节点数目。
3.2.4 任务协同效能函数

其中,当节点不满足当前所分配任务所需要的能力或节点执行任务的航程不应大于它的最大航程时,任务协同效能为0。
3.3 任务协同条件约束
(1)每个任务只需要一个有人机或无人机执行,即满足

(2)节点航程约束
节点执行任务的航程不应大于它的最大航程,即满足

式中 ,Lmax为该节点的最大航程。
(3)执行时间约束
满足任务执行时间最小,即满足

(4)有人机/无人机任务编队执行完任务之后效能最大,即满足

4 实验结果及分析
该实验是以有人机/无人机攻击任务协同为场景,验证本文研究的有人机/无人机任务协同模型的有效性。该场景下,任务集合为多个目标点的集合。其中,有人机/无人机任务编队共5架,攻击任务中的初始任务点共9个。
在进行任务协同之前,先将传统合同网协议分配与本文的基于拓展合同网协议的任务分配进行对比,这里主要对比的是静态任务分配阶段,因后续涉及的一系列动态分配过程,传统合同网协议并未对此给出分配方法,而这也是本文实时性和动态性的由来。本实验在基础条件一样的情况下,将传统合同网协议分配方法与本文提出的基于合同网扩展的任务分配方法分别进行200组实验,将每10组的执行时间取平均值,进行任务执行时间的对比。这20组平均值绘制如图3所示。

图3 任务分配对比图Fig.3 Task assignment comparison chart

表1 有人机/无人机任务编队属性信息表Table 1 MAV/UAV task formation attribute information table
由图3可以发现,基于扩展合同网协议的任务分配的执行时间在80%以上的时间都要比传统合同网协议分配的任务执行时间短,以此说明本文提出的扩展合同网协议的任务分配是有效的。
4.1 静态任务分配
如图4所示为传统合同网协议任务分配及基于扩展合同网协议的静态任务分配的轨迹图,图5所示为每个节点的负载图。根据两种方法的负载图可知,在静态任务分配时,本文所提出的方法分配任务的执行时间比传统合同网协议分配任务的执行时间短,以此来证明本文所提出的方法有效。同时,根据分配图可知,UAV5的攻击能力为 0.6,但传统合同网协议的分配方法却将攻击能力需求为0.7的任务4分配给UAV5,这属于不合理现象,更加印证了本文提出的任务协同方法的有效性。此时,有人机/无人机武器数量为{92,4,1,2,0}。

图4 静态任务分配Fig.4 Static task assignment

图5 节点任务负载图Fig.5 Node task load graph
4.2 任务点变化
在本轮任务协同时,有人机监测到在第3秒时任务4发生了移动,所以引发了对任务4的重分配,此时有人机/无人机武器数量为{92,4,5,2,0}。能力足够的无人机根据通过本模型设计的效能函数计算得出各自对于完成任务4的效能,来向有人机投标,因为任务4所需要的武器数量为4,满足该武器需求的无人机有UAV2、UAV3,根据效能函数的计算发现该任务由UAV3执行时间更短、效能更高,所以该任务由UAV3执行。有人机/无人机武器数量更新为{92,4,1,2,0}。任务变化之后的任务分配图如图6所示。

图6 任务点变化的任务分配Fig.6 Task assignments that vary at task points
4.3 节点失效
在本轮任务协同中,有人机监测到在第5秒时UAV2失效了,但UAV2的任务队列中还有任务7没有完成,所以有人机全面接管UAV2的任务队列,对任务队列里未完成的任务进行任务重分配。若任务队列里有多个未完成的任务,分配按照任务优先级进行。此时,任务队列里只有一个任务7,所以通过表2可得任务7所需要的武器数量为 2,所以有人机向有能力完成该任务的UAV4招标,UAV4在计算了自己的效能函数之后向有人机投标,有人机将任务7分配给UAV4,同时UAV2失效,我们也认为它没有能力执行接下来的所有任务,所以将武器数量置为 0,且标记为已失效。此时,有人机/无人机武器数量更新为{92,0,1,0,0}。UAV2失效后的任务分配如图7所示。
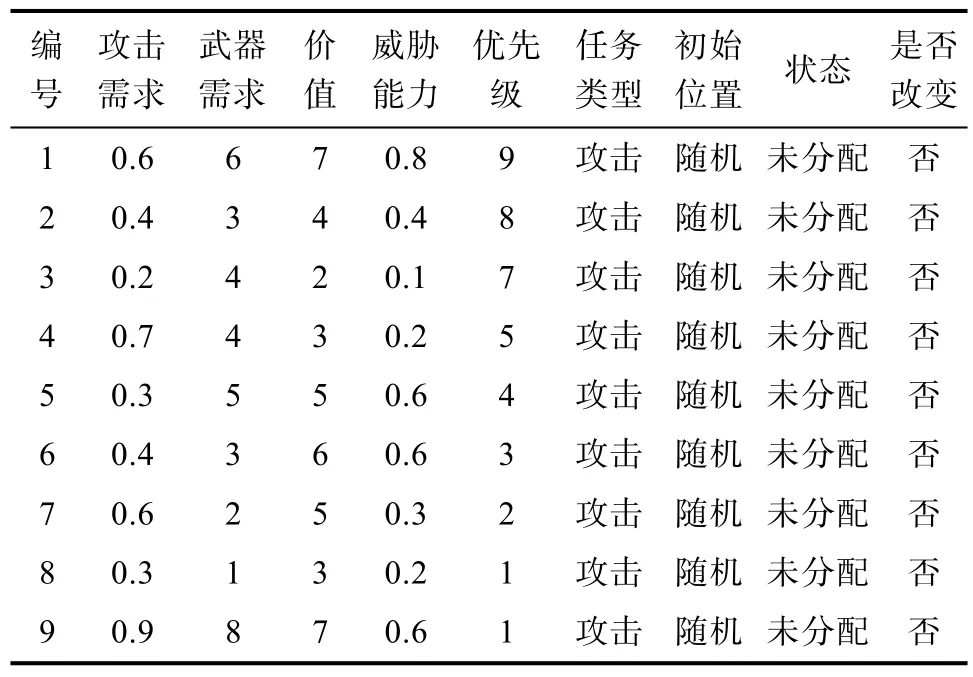
表2 任务初始信息表(按照优先级排序)Table 2 Task initial information table (sorted by priority)

图7 UAV3失效后的任务分配Fig.7 Task assignment after UAV3 failure
4.4 动态任务
在本轮任务协同中,有人机监测到在第7秒时出现了新的任务10,此时任务10由有人机接管并进行任务重分配。该任务所需的攻击武器为20,而目前没有能满足该能力的无人机,所以该任务由有人机执行。动态任务分配如图8所示。

图8 动态任务分配Fig.8 Dynamic task assignments
本轮将新任务10分配给了MAV,有人机/无人机武器数量更新为{72,0,1,0,0}。
在之后的任务执行过程中战场再没有其他突发状况产生,至此所有任务分配协同完成。本文所提出的扩展合同网协议的任务协同方法在面对战场的突发情况时有应对措施,且有较高的实时性,实验情况较好。
5 结束语
本文在传统合同网协议分配方法上进行拓展,建立有人机/无人机任务协同模型。在投标时减少投标者的数量,缓解了传统合同网协议分配方法中广播方式进行招标产生的通信量,减少了资源的浪费,且在分配时考虑无人机能力,确保除突发事件外任务分配之后能顺利完成。同时,在任务执行过程中让有人机实时监测,对于战场突发状况能及时处理,解决了传统合同网协议分配方法只能执行离线任务的缺点,提高了其实时性。与传统合同网协议分配方法相比,本文提出的任务协同方法减少了任务的执行时间,具有较好的实时性和可行性。
