面向多无人机监督控制任务的操作员信息过载防控方法
2022-11-29白文博李紫磊
陈 军,白文博,李紫磊,陈 双
(1.西北工业大学电子信息学院,西安 710072;2.广阳湾实验室重庆脑与智能科学中心,重庆 400064)
1 引 言
为实现一对多的控制能力,操作员应避免直接介入无人机的底层控制系统,而应将更多的资源用于处理更高层次的规划、决策和管理等任务。这种在控制领域从更低层次的技能行为向更高层次的认知行为的转变被称为“监督控制”[1-2]。操作员的多无人机监督控制能力,即能够同时管理无人机的数量,一方面取决于无人机在飞行、导航、任务与载荷管理3个控制回路的自主等级,另一方面也与人机交互的频率和交互的信息量、系统的可靠性和可信性、通信的带宽、任务的复杂度和时间要求以及操作员的训练水平等因素密切相关[3-5]。
近年来,无人机集群作战样式得到了广泛重视和迅速发展,对操作员的多无人机监督控制能力提出了更高的要求[6]。为此,一方面需要继续提升无人机集群的编队飞行协同控制能力和无人机的自主水平,另一方面还需要重视人机交互过程中操作员的任务负荷问题,减少信息过载情况的发生[7]。多无人机监督控制过程中的信息过载是指需要操作员处理的人机交互信息量超出了其可处理的能力极限,导致操作员的人机交互效率下降,无法及时响应交互需求的现象[8]。
对于信息过载问题,可以从操作员或人机交互过程两个角度进行防控和优化。在操作员方面,浦同争等[9]分析了无人机操作员的人因可靠性,为无人机操作员考核评价提供了新的思路,通过该方法预测无人机操作过程中可能出现的操作差错概率;吴慧垚等[10]基于认知架构研究了无人机操作员的意图预测技术。在人机交互方面,周德旭等[11]阐明了当前使用的无人机地面控制台的主要缺陷,并提出了一种控制台人机界面布局的优化方法;王阔天等[12]基于任务量和模糊逻辑设计了一种多无人机监督控制系统的人机功能动态分配方法,提高了监控系统的性能。
上述研究工作主要聚焦操作员正常信息负载下监督控制系统性能的能力提升,对于操作员面对信息过载问题时的方法少有研究。因此,本文将重点研究面向多无人机监督控制任务的操作员信息过载防控问题,拟基于概率和信息理论建立包含交互事件信息量化和信息过载阈值确定的信息过载判定模型,采用人机功能动态分配方法设计人机交互事件响应策略,实现操作员信息过载的防控,最后以无人机集群执行对地搜索打击任务为实验想定,仿真验证信息过载防控方法的有效性。
2 信息过载防控模型框架
在多无人机监督控制系统中,应当坚持以操作员的信息需求为中心,通过操作员与无人机集群之间的相互协作,适时变换人机控制权限,完成任务分配、航迹规划、目标识别、武器攻击授权4类基本功能[13],具体过程描述如下:
(1)任务开始前操作员需要对无人机集群进行任务分配,包括无人机集群的编队划分、队形控制、任务区域划分、航路规划等。
(2)无人机集群按预先设定的编队、队形以及航路飞行,并适时传回战场态势和无人机状态等数据信息,操作员需要保持良好的认知状态,监控无人机的任务状态,通过人机交互手段响应突发和异常事件。
(3)无人机集群到达指定任务区域后,执行相应任务,操作员需要监控无人机的任务执行情况,必要时改变控制指令,包括目标识别、目标分配以及武器攻击授权等。
(4)任务结束后监控无人机状态,保证无人机安全返航。
在上述过程的第2和第3阶段,人机交互活动较多,交互信息量大,容易发生信息过载现象。因此,本文以交互事件作为研究对象,研究信息过载防控方法,建立信息过载防控的模型框架,如图1所示。

图1 信息过载防控模型框架Fig.1 Information overload containment model
交互信息数据库负责记录操作员与无人机的交互事件;信息过载模型负责交互事件的信息量化和信息过载的阈值确定;信息过载防控模型负
责在发生信息过载时通过人机功能动态分配方法进行人机交互事件的响应和处理,降低操作员信息负载,防止信息过载现象的发生。
3 信息过载判定模型
3.1 交互事件的信息量化
判定操作员信息过载,首先需要量化交互事件的信息量。基于概率和信息理论,若交互事件Xi发生的概率为pi,则交互事件Xi发生带来的信息量H(Xi)为

可以看出,信息量的大小与该交互事件发生的概率呈负相关,有经验的操作员对大概率事件往往有所准备,而一个概率较低的交互事件发生,就超出了操作员的心理预期,即小概率事件带来了较大的信息量。显而易见,不同类型的信息发生概率不同;交互事件发生概率除受交互事件类型影响外,任务阶段也会对交互事件发生概率产生影响。因此,交互事件Xi发生的概率pi为

式中,category为交互事件Xi所属的交互事件类型。t为该信息的出现时间。
为了确定交互事件的概率分布,通过采样并用样本频率分布估计总体概率分布。首先通过抽样获得交互事件样本,对于不同类型的交互事件,分别确定概率分布。将抽样获得的交互事件样本按类型划分,其中a类型的交互事件样本按照交互发生时间排列得到样本总体为

式中,t1,t2,… ,tn为a类型交互事件样本的交互发生时间,且t1<t2<…<tn,a类型交互事件样本容量为n,则a类型交互事件的概率密度函数fa(t)的定义域为Ra=[t1,tn],即

通过样本频率分布估计总体的概率密度,首先将定义域Ra平均分为m段,以分段中点为横坐标,落入分段的样本数,即样本频数为纵坐标,得到m个样本频数分布点Ai(xi,yi),其中i= 1 ,2,… ,m,频数分布点的坐标为

式中,h为落入第i分段中的最大样本序号,g为落入分段的最小样本序号,h和g满足

通过最小二乘法以频数分布点A1,A2,… ,Am为数据点拟合近似曲线fa(t),取误差为偏差平方和,表示为

a类型交互事件概率密度函数近似为fa(t),表示为

概率密度函数fa(t)积分得到a类型交互事件的概率分布Fa(t)为

由于拟合存在误差,需要对总体概率分布函数Fa(t)进行检验,采用卡方拟合优度检验法检验概率分布函数Fa(t)的准确性,检验步骤如下:
(1)作假设H0:a类型交互事件的概率分布为Fa(t);
(2)在概率分布函数Fa(t)的定义域Ra内均匀地取q-1个实数c1,c2, … ,cq-1,使t1<c1<c2<…<cq-1<tn,c1,c2, … ,cq-1满足

(3)取pi0=Fa(ci) -Fa(ci-1) ,i= 2 ,… ,q- 1 ,p10=Fa(c1),pq0=1 -Fa(cq);
(4)取 (T1,T2,…,Tn)T为来自总体的样本,观测值为 (t1,t2,…,tn)T,频数Ni表示样本落入区间的个数,其中i=
(5)建立皮尔逊统计量

(6)显著性水平α取 0.05,在假设H0下,拒绝域为

对于信息类型为category,交互发生时间为t的交互事件Xi(category,t),信息量H(Xi(category,t))可表示为

3.2 信息过载阈值的确定
在人机交互过程中,个人决策质量与接受的信息量之间呈现倒U型关系,即在某一限定的信息量下,个人决策质量与信息量成正比关系,而当信息量超过某一阈值,个人决策质量会随着信息量的继续增加而迅速降低。这主要是由于信息过载导致个人无法明确信息的优先级而忽略某些重要的信息,接收到的信息量超过个人的能力极限,进而导致个人决策质量的下降,个人决策质量与信息量的关系如图2所示。

图2 个人决策质量随信息量变化趋势Fig.2 Changing trend of decision quality about the amount of information
建立当前任务信息量H到个人决策质量Q的映射以确定信息过载阈值,定义个人决策质量Q为操作员一段时间内正确处置的信息量Hright,可表示为

式中,Δt为过载阈值判定时间,Xi-right为正确处置的交互事件。测量个人决策质量随交互信息量变化情况,在个人决策质量Q达到极值Qmax时的信息量H即为信息过载阈值Hoverload,可表示为

4 信息过载防控方法
为了防控信息过载现象的发生,可以通过信息过载判定模型对无人机发起的交互事件进行信息量化,然后利用信息过载判定模型确定操作员是否信息过载,再将交互事件按其信息量大小排序,超出过载阈值的交互事件由无人机自主处置,从而实现交互事件处理功能的人机动态分配,降低操作员信息过载。如图3所示为基于人机功能动态分配方法的信息过载防控方法。

图3 信息过载防控方法Fig.3 Information overload containment method
交互事件处理功能的动态分配主要通过选择人机交互事件的响应方式(Interactive Response Mode, IRM)来实现。借鉴Sheridan等[14]对自动化水平(Level of Automation, LOA)描述中的同意管理模式和例外管理模式,本文设计了以操作员和无人机为主体处置交互事件的两种响应方式:(1)同意管理方式,对于无人机发起的交互事件,在操作员响应并授权后实施,即IRM=consent;(2)例外管理方式,对于超出信息过载阈值的人机交互事件,在操作员一段时间内不否决后无人机自动实施,即IRM=exception,如表1所示。
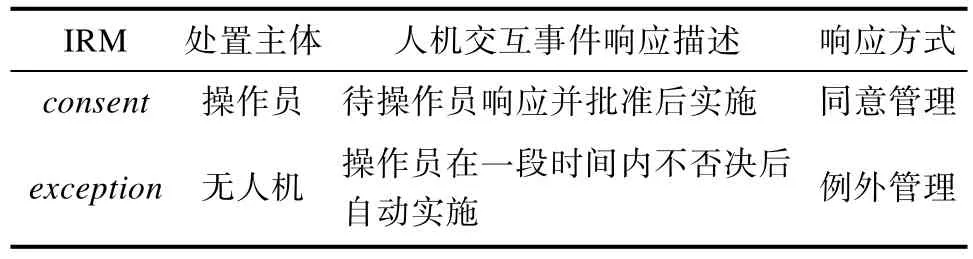
表1 交互响应方式Table 1 Interactive response modes
设全部交互事件的集合为I= (I1,I2,… ,In),对应的信息量分别为H1,H2,… ,Hn,对每条交互事件设置独立的响应方式IRM1,IRM2,… ,IRMn,此时的总任务信息量为将需要处理的全部交互事件I= (I1,I2,… ,In)按其对应的信息量H1,H2,… ,Hn从大到小排列,排列后的信息序列为I′。

即I(1)为携带信息量最大的交互事件,I(n)为携带信息量最小的交互事件。
若总的任务信息量不超过信息过载阈值Hoverload,此时操作员信息负载较轻,有能力处置全部交互事件,交互响应方式均取同意管理方式,即

当总的任务信息量超出信息过载阈值Hoverload,此时操作员信息负载较重,操作员难以处置全部交互事件,将部分交互事件的响应方式调整为例外管理方式,降低操作员的信息负载。
不同交互事件的紧急程度与优先程度不同。当操作员无法正确处置所有交互事件时,应尽可能优先处置紧急程度、优先程度较高的交互事件。一条信息携带的信息量大则说明此时该交互事件的发生概率较低,即更可能属于突发事件;而携带信息量较少的信息发生概率较高,即频繁在当前任务阶段出现,不属于突发事件,可由无人机自主处置。
对于排列后的信息序列I′ = (I(1),I(2), … ,I(n)),其对应的信息量分别为H(1),H(2), … ,H(n),取信息序列的信息量前m项和恰好不超出信息过载阈值Hoverload,表示为

信息过载阈值内的m条交互事件的处置方式取为同意管理方式,超出阈值部分n-m条交互事件对应的处置方式调整为例外管理方式,即

关于多无人机监督控制任务性能,Olsen等[15]提出了最大可忽视时间NT(Neglect Time)、平均交互时间IT(Interaction Time)和可有效同时监控的无人机数量FO(Fan Out)的概念。其中,NT表示无人机在其性能降低到某个阈值之前可以忽略不管的时间;IT表示操作员与无人机的平均交互时间。本文中,多无人机监督控制任务性能可用FO描述,表示为

本文定义最大可忽略时间NT为无人机一次交互事件结束到下一次交互事件发起的时间,平均交互时间IT为交互事件的持续时间,如图4所示。
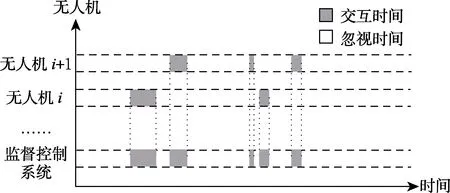
图4 系统忽视时间和交互时间示意图Fig.4 Schematic diagram of NT and IT
5 仿真验证分析
5.1 实验环境
仿真实验以单操作员监督控制无人机集群执行对地搜索打击敌方地面目标任务为想定。集群由50架配备反辐射导弹的无人机构成,划分为5个编队,每个编队10架无人机,编队按照由多个航路点组成的预定飞行路径搜索目标,在发现并确认目标为敌方雷达后,向操作员发起攻击授权请求,批准后执行攻击任务。敌方由5个地面雷达目标构成,位置在任务区域随机布置。
在实验仿真过程中,除了常规的监督控制任务,还设置了两类异常事件需要操作员处理,包括环境异常和无人机状态异常。环境异常指战场中未知的不利环境因素,具体表现形式为大小随机变化的突发威胁区域。无人机状态异常指单架无人机的健康状况,具体表现形式为集群中的无人机随机发生故障。
仿真实验系统参考美国空军研究实验室[16]开发的Vigilant Spirit Control Station系统设计而成,包括无人机状态监控、多机任务监控、信息监控、编队与载荷监控和交互控制等模块,多无人机监督控制仿真系统界面如图5所示。

图5 多无人机监督控制仿真系统界面Fig.5 Interface of multi-UAVs supervisory control simulation system
5.2 仿真过程
无人机集群执行对地搜索打击的过程分为目标搜索、目标识别、目标分配、火力打击4个任务阶段。每个阶段的人机交互事件及信息流向如图6所示。

图6 人机交互事件及信息流向Fig.6 Human computer interaction events and information flow
目标搜索阶段:无人机沿预先规划航路搜索目标,操作员监督控制的内容主要为处置环境异常和无人机状态异常等人机交互事件,如图7、8所示。

图7 环境异常Fig.7 Abnormal environment

图8 无人机状态异常Fig.8 UAV status abnormality
目标识别阶段:操作员监督控制的内容主要为处置敌我识别和目标确认等人机交互事件,如图9所示。

图9 目标识别Fig.9 Target identification
目标分配阶段:操作员监督控制的内容主要为处置无人机集群目标分配方案确认和方案的调整等人机交互事件,如图10所示。
图10 目标分配Fig.10 Target assignment
火力打击阶段:操作员监督控制的内容主要为处置无人机攻击授权请求等人机交互事件,如图11所示。

图11 火力打击Fig.11 Fire strike
5.3 验证分析
5.3.1 信息过载判定
仿真实验主要包括环境异常、无人机状态异常(以下简称为状态异常)、目标识别、目标分配和攻击授权5类人机交互事件,通过仿真实验,得到它们各时段发生的频率分布情况,如图12所示。
图12中各类交互事件发生频率的分布情况,符合4个仿真阶段中单操作员对无人机集群监督控制任务内容的设定。拟合并检验得到的信息量函数,得到各类交互事件的信息量曲线如图13所示。

图12 交互事件发生的频率分布Fig.12 Frequency distributions of interaction events

图13 各类交互事件的信息量曲线Fig.13 Information quantity functions of interaction events
从图13可以看出,目标识别、目标分配和攻击授权交互事件仅在对应的目标识别、目标分配和火力打击阶段出现。假定它们在其他阶段发生时对应的信息量为+∞,可得到 5类交互事件的平均信息量,如表2所示。
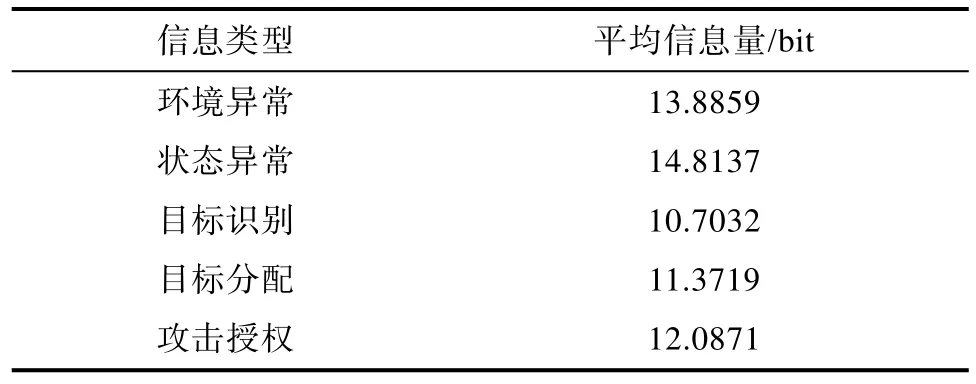
表2 各类交互事件的平均信息量Table 2 Average amount of information for interactive events
从平均信息量角度看,无人机状态异常事件的平均信息量最大。因为一旦无人机状态异常将直接威胁无人机安全,需要及时处理;环境异常事件可能导致机群面临威胁,平均信息量也较高;目标识别、目标分配和攻击授权事件的平均信息量相似。
通过单操作员正确处置交互事件的信息量与当前任务信息量的关系计算信息过载阈值,当前任务信息量和正确处置信息量在任务过程中的变化如图14所示。

图14 正确处置信息量和全部交互信息量变化趋势Fig.14 Amount of information handled correctly and the total amount of information
从图14中可以看到,当正确处置的信息量与当前任务信息量相当时,表明操作员可以处置当前的任务交互信息;随着任务信息量的不断增加,超过某一阈值之后,正确处置的信息量不再增加,甚至开始降低,表明操作员已不能处置全部任务信息,发生了信息过载现象。
对于信息过载阈值,以当前任务信息量H为输入,正确处置信息量代表个人决策质量Q为输出,采用神经网络方法拟合个人决策质量Q关于任务信息量H的函数,如图15所示。
从图15可以看到,个人决策质量Q在任务信息量H达到62.2317 bit左右时基本达到极值,即为需要确定的信息过载阈值。根据表2所示的平均信息量可以得到同时响应交互事件的数量上限,如表3所示。
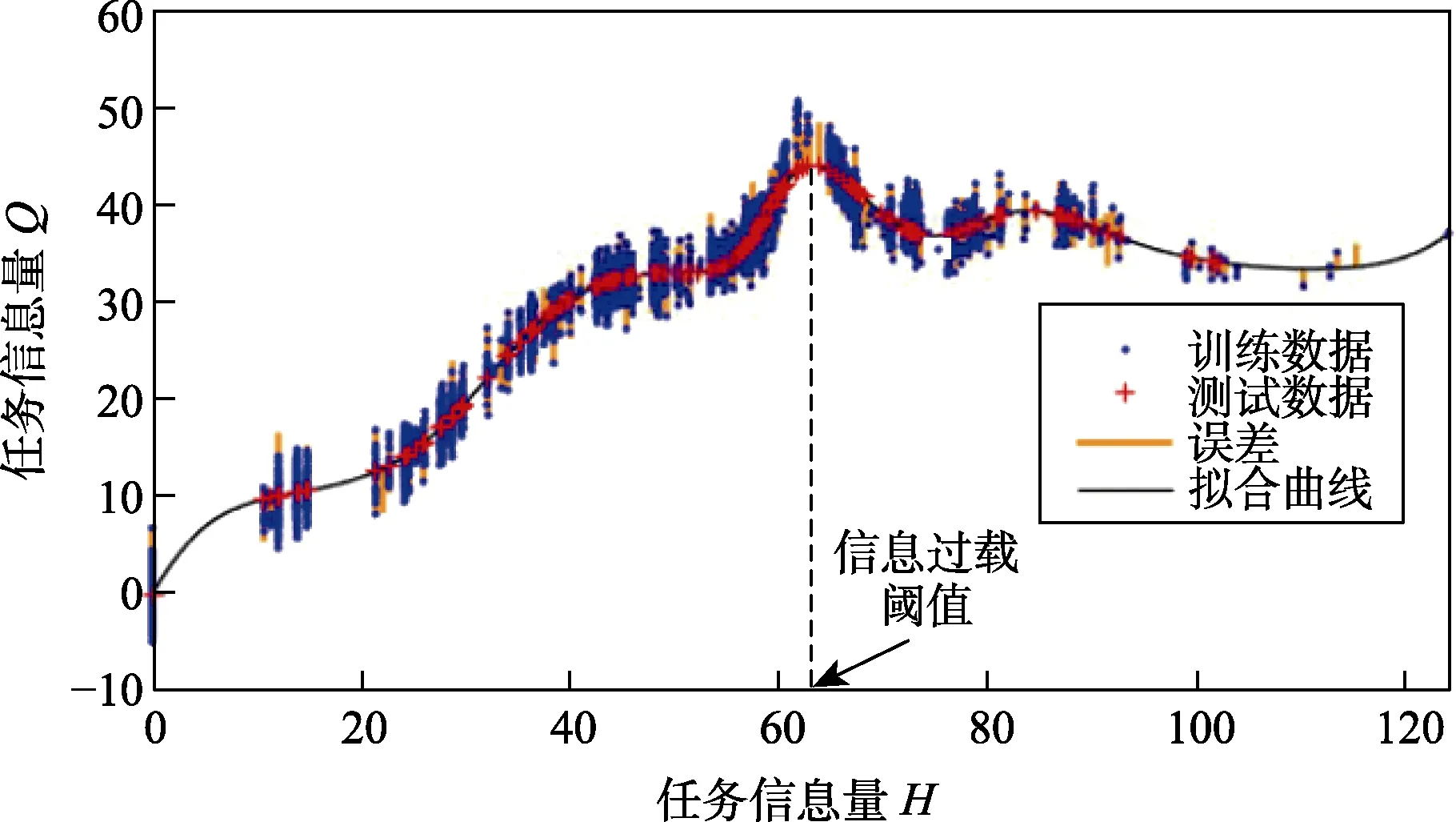
图15 任务信息量到个人决策质量的映射Fig.15 Relationship between decision quality and task information

表3 同时响应交互事件数量上限Table 3 Maximum number of simultaneous response interaction events
根据表3可以得到5类交互事件同时响应的数量上限均值为5.0236。由此可见,操作员能够同时管理无人机的数量一方面取决于无人机控制回路的自主等级,另一方面也与人机交互的频率和交互的信息量等因素密切相关。假设每条交互事件对应一架无人机,即操作员可以同时响应交互请求的无人机数为5.0236。在多无人机监督控制环境下,当需要响应的信息量超过操作员的信息过载阈值,就需要启动信息过载防控措施。
5.3.2 信息过载防控
在任务过程中,随着交互事件增多,交互信息量逐渐增加,信息量达到信息过载阈值时判定操作员发生信息过载,通过及时调整人机交互事件的响应方式,降低操作员的信息负荷。实施信息过载防控后的交互事件响应方式变化情况如图16所示。
在图16中,无信息过载防控时,交互事件的响应始终采用同意管理方式;在有信息过载防控条件下,操作员发生信息过载现象时,将产生信息过载的交互事件的响应方式切换成例外管理方式,从而提高操作员对交互事件的处理效率,减轻信息负载。此时,部分交互事件响应方式为同意管理方式,另一部分则为例外管理方式,全部交互事件的平均响应方式介于同意管理方式和例外管理方式之间。在信息过载防控模型作用下,操作员正确响应交互事件的信息量提升效果如图17所示。

图16 信息过载防控下的交互事件响应方式变化Fig.16 Interactive event response mode under information overload containment
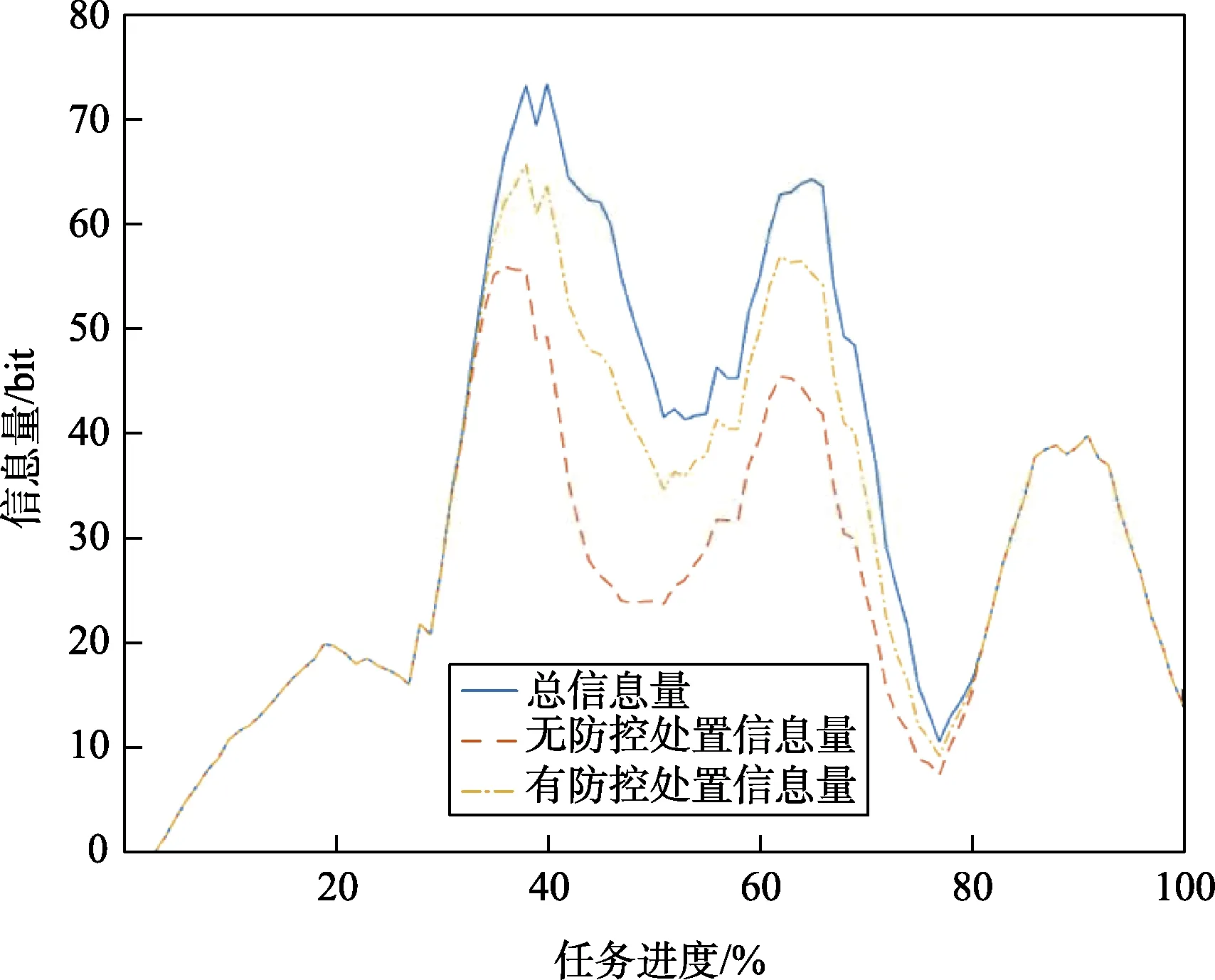
图17 有无信息过载防控正确响应信息量对比Fig.17 Comparison of information quantity of correctly handled with or without information overload containment
在信息过载防控模型作用下,信息过载时部分交互事件采取例外管理响应方式,操作员只须监督无人机而无须控制操作,大幅提升了信息过载状态下正确响应的交互信息量,但仍存在极端情况,操作员未觉察到例外管理方式的交互事件而导致无人机错误的自主响应,故在信息过载防控模型作用下正确处置信息量略小于总任务信息量。有无信息过载防控时操作错误的信息量对比如图18所示。
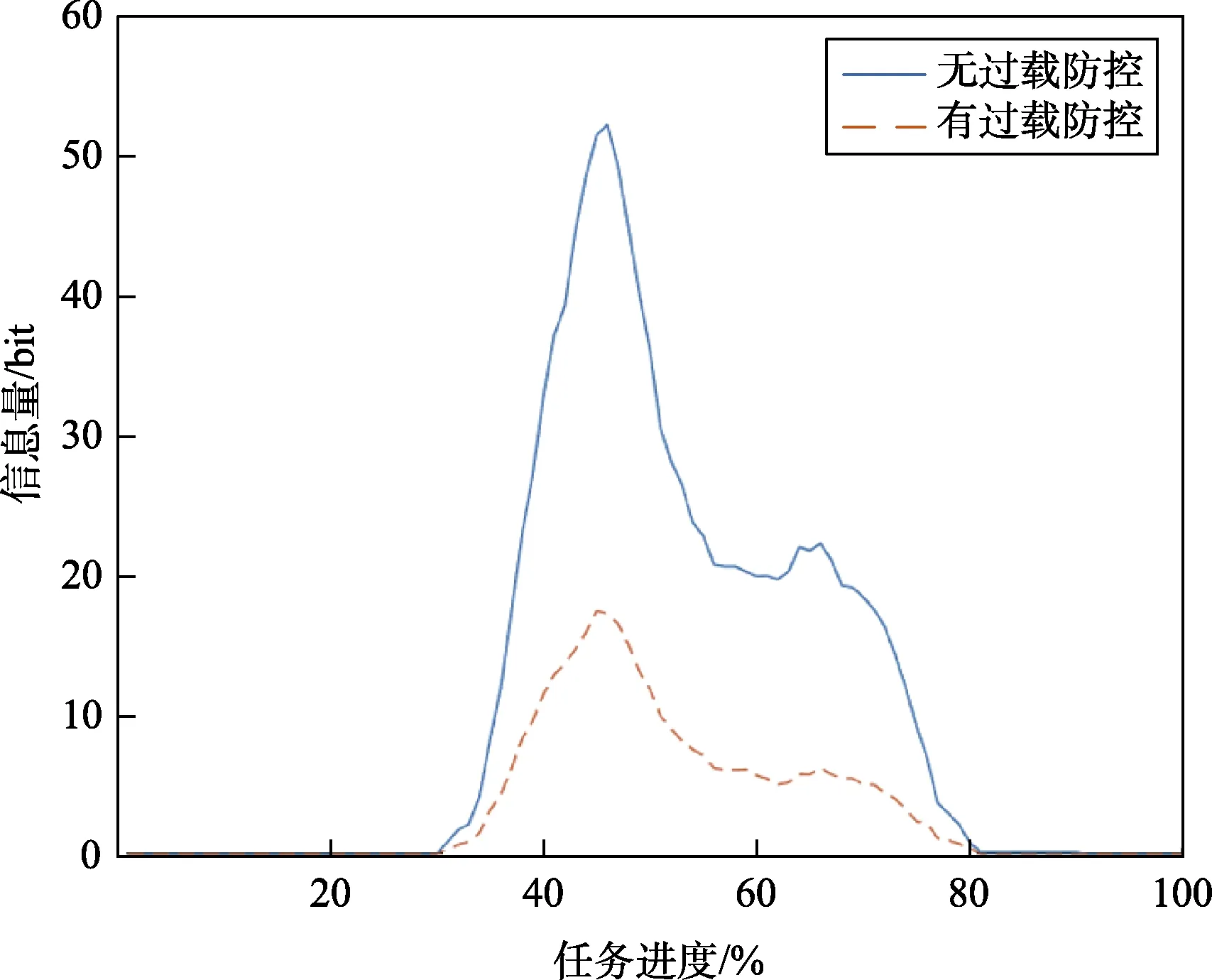
图18 有无信息过载防控时操作错误信息量对比Fig.18 Comparison of information quantity of error handling with and without information overload containment
由图18计算得出,无信息过载防控时操作错误信息量为1091.5 bit,有信息过载防控时操作错误信息量为342.2 bit,信息过载防控模型降低了68.7%的操作错误信息量。
最后,对比有无信息过载防控下两种情况下的多无人机监督控制任务性能,计算有无信息过载防控时的NT、IT以及FO值,如表4所示。

表4 有无信息过载防控下的监督控制性能对比Table 4 Comparison of supervisory control performance with and without information overload containment
表4中,可忽视时间NT值为忽视时间占总任务时间的比例,平均交互时间IT值为全部交互事件的交互时间的均值占总任务时间的比例。信息过载防控模型提高了监督控制 2.60%的可忽略时间NT,降低了操作员与无人机27.3%的平均交互时间IT,进而提高了37.5%的多无人机监督控制任务性能FO。由于可忽视时间很大程度取决于交互事件的产生概率,交互事件产生则可忽略时间停止,故有无信息过载防控时可忽视时间NT差别不大;在交互事件较多情况下,无信息过载防控时,多个交互事件等待操作员响应,信息过载防控模型分配无人机自主响应部分交互事件,减少了部分交互事件的等待时间,故信息过载防控模型大幅降低了平均交互时间IT,进而提升了监督控制性能FO。仿真实验表明,基于过载防控机制有效降低了信息过载的负面影响,提高了多无人机监督控制系统的交互效率。
6 结束语
本文以人机交互事件为对象,开展了面向多无人机监督控制任务的操作员信息过载防控方法研究,主要工作如下:
(1)基于概率和信息理论建立了人机交互事件的信息量化模型,通过分析信息量与个人决策质量的映射关系,建立了信息过载阈值的计算模型,实现了信息过载的判定。
(2)基于人机功能动态分配方法设计了面向信息过载的人机交互事件响应方式及其实施策略,并通过评价多无人机监督控制任务性能验证了信息防控方法的有效性。
因此,本文提出的面向多无人监督控制任务的操作员信息过载防控方法,可为有人-无人系统的协同任务下的监督控制模式、协同决策机制、人机高效交互,以及态势认知增强等问题的研究提供方法参考。
