基于综合性能评估系统的智能接触器控制策略
2022-11-25刘佳璇许志红
刘佳璇,许志红,2,3
(1.福州大学电气工程与自动化学院,福建 福州 350108;2.福建省新能源发电与电能变换重点实验室,福建 福州 350108;3.智能配电网装备福建省高校工程研究中心,福建 福州 350108)
0 引言
接触器是一种大容量开关电器,目前大量装设于电源出线端与电动汽车充放电接口处,承担新能源并解网操作与电动汽车充放电任务,用量增加的同时对其性能提出了新的要求[1].研究者们提出通过仿真手段优化开关本体结构,或采取智能控制策略优化接触器的运动过程.本体结构受材料与尺寸约束,提升空间有限,电器智能化具有更大的潜力[2].但现有的控制方案都针对于特定的优化目标,控制方案孰优孰劣,以及控制方案对接触器综合性能的影响还有待讨论.因此,有必要对各种智能接触器产品进行分析,对控制策略进行综合评估,将控制策略与开关本体结构进行最优匹配,更好地提升接触器的综合性能.
选用高精度传感器件结合虚拟仪器建立接触器动态特性测试系统,可以检测线圈电流、线圈电压、铁心位移、触头信号等信息[3-4].在此基础上,文献[5-6]考虑接触器状态特征参数的相关性及其对电器状态的影响度,对接触器全寿命周期进行状态表征,并提出将灰色模糊理论应用于触头状态评估.孙曙光等[7-8]分析影响交流接触器电寿命的特征量,提出基于粗糙集与证据理论的交流接触器预期电寿命预测方法.杨怡君等[9]研究多台同规格交流接触器,提出交流接触器动态响应特性的评价方法.高筱婷等[10]采用核主成分分析方法进行信息融合,输入隐半马尔可夫模型中,实现智能电器运行状态的监测与识别.
以上研究针对传统接触器,反应接触器的剩余电寿命与动作可靠性.而智能接触器的评估体系需要重点考虑控制策略对性能参数的影响,能耗等级、抗干扰能力等也是关键的考核内容.本文设计智能接触器综合性能评估系统,在满足测试系统数据采集与处理分析功能的同时,利用高速可重配置的FPGA硬件模块实现接触器的运行全过程实时控制与高效的控制策略改写.提出基于云模型与TOPSIS方法的智能接触器性能评估方法,以分数、雷达图的方式直观表征评价结果.在此系统基础上,对智能接触器产品进行分析,进而对各类控制策略进行评估比较,使其与开关本体结构实现最优匹配.
1 智能接触器工作原理
接触器是一种依据电磁感应原理而动作的开关电器,在运动过程中始终满足电压平衡方程和运动学方程,如下式.

(1)
(2)
式中:ucoil、icoil为线圈电压、线圈电流;Rcoil、Lcoil为线圈电阻、线圈电感;ψ为电磁机构磁链;Lcoildicoil/dt为线圈电感自感电动势;x为铁心位移;vicoildLcoil/dx为动铁心运动产生的反电动势;F为电磁吸力;Ff为反力.静态电磁吸力可由下式求解,其中,δ为动静铁心之间的气隙.

(3)
在线圈两端施加电压后,铁心电磁吸力克服弹簧反力与机械摩擦力做功,动铁心运动带动动触头,直至动静触头闭合.传统的交流接触器控制电源直接与线圈相连,由此导致运行过程中存在诸多问题,如功耗大、受合闸相位影响动作时间分散性大、运行噪声大、燃弧时间长等.智能控制的引入可以有效解决上述问题.
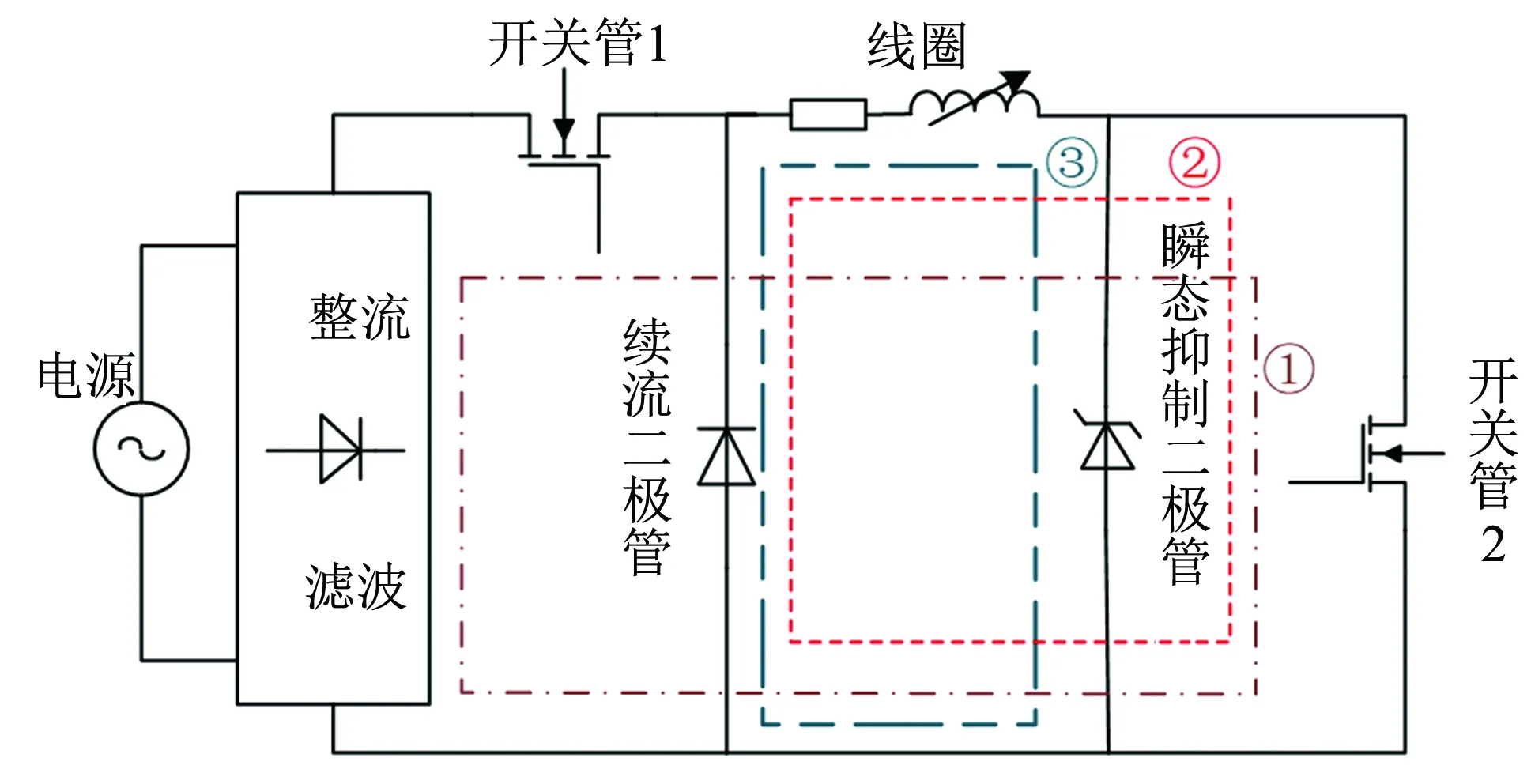
图1 接触器控制模块主电路Fig.1 Contactor control module main circuit
智能接触器电子控制模块主回路电路结构如图1所示,该电路有3种工作模态.若两开关管同时导通,电路工作在激磁态,icoil上升;若开关管1断开,开关管2导通,icoil经续流二极管缓慢下降,电路工作在续流态;若两开关管均关断,去磁模块工作,在线圈两端施加反向电压,icoil急速下降,电路工作在去磁态.对两开关管的导通状态进行控制,即可动态调节icoil、ucoil,使得接触器在交直流宽电压范围内工作.
2 智能接触器综合性能评估系统
2.1 综合性能评估体系
对接触器控制策略研究的相关文献进行统计整理,归纳控制策略对接触器性能影响的表征参数,并结合专家经验与工程实际,选取接触器运行过程中的重点参数,建立图2所示的初始评估体系.初始评估体系中存在指标冗余,引入层次聚类法对指标进行筛选,存在两组指标具有强相关性,即燃弧时间与燃弧能量、燃弧功率与电弧侵蚀量,对其进行剔除.得到最终的接触器综合性能评估体系.
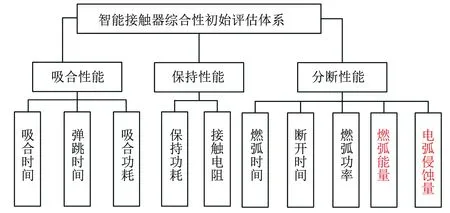
图2 智能接触器综合性能初始评估体系Fig.2 Initial evaluation system for comprehensive performance of intelligent contactor
评估体系中每项指标对评估结果的贡献程度不同,需要合理分配指标权重.层次分析法(analytic hierarchy process,AHP)对各个指标两两进行重要性比较[11],构造判断矩阵Arp.修正Arp使其通过一致性校验,用算术平均法求权重.AHP法易受人的感情因素影响,不同决策者给出的Arp不同,无法衡量权重分配的可靠性,于是引入客观赋权方法.客观赋权法考察样本数据的差异性来决定权重大小[12].其中,熵权法对数据量要求较大,对于异常数据过于敏感,容易造成某项权重极大的不合理情况出现;主成分分析法的赋权结果不针对原始指标,不利于对后续评价结果进行定性分析;变异系数是统计学中用来表示指标变化程度的参数,受样本离散程度与平均水平的影响,可以充分反映指标的差异度.
采取AHP法与变异系数法结合的综合赋权法.主客观权重的差距越小,证明两权重取值越合理,故采用离差最小化法进行主客观权重的分配.计算公式如下,假设有m个待评样本,n项指标,rij为指标数值,a为主观权重占比,b为客观权重占比,wz为主观权重,wk为客观权重,w为组合权重.组合赋权中客观权重受指标数据影响,不同的样本测试数据会改变最终的赋权结果,使得权重可以自适应调节.

(4)
2.2 评估解算模型
本文应用云模型理论以实现两层指标的转换.假设定性概念的论域为U={X},X为与其相关的元素,X对U的隶属度μ为一个具有稳定倾向的随机数,隶属度在论域上的分布称为云,每一个随机数都称为云滴[13].云模型的核心是3个数字特征,期望Ex、熵En和超熵He,定性概念与定量概念均可用这3个数字特征进行表示.期望是样本的平均值;熵反映云滴的离散程度与取值范围;超熵反映云滴的凝聚程度与厚度.接触器各特性参数充满随机性与分散性,使用云模型进行评估可以充分表现样本数据的分布特征,使得评估结果可信度更高.
划分定性指标的评价等级,确定各等级的评语范围[cmin,cmax].选择五级制评价等级,将可以满足基本动作要求的产品定为及格以上,囊括较大的范围,各等级划分范围如表1所示.计算各评价等级的数字特征,公式如下,He一般取0.01~0.10,熵越小He越小,本文选取He=0.01.

表1 定性指标评价等级划分Tab.1 Qualitative index evaluation grade division
(5)
(6)
测算得到的指标数据用数字特征表述,公式如下:

(7)

(8)

(9)

(10)

图3 数据云图与等级云图Fig.3 Data cloud map and grade cloud map
以某组实验吸合时间实验数据为例,云滴数设为1 000,生成数据云图与等级云图,如图3所示.根据数据云图的所在位置判断该样机的吸合时间隶属性能评价等级良,但图形评价结果较为粗泛,没有具体的数值表征结果,不易于对多层评估体系中的评估结果进行综合表示.故在此基础上需要寻求一种数值算法表征评估结果.
TOPSIS算法计算待评样本与正负理想解的距离,从而计算相对贴近度[14].将由云数字特征构成的云向量作为TOPSIS方法的待评估量,选择评价等级最高与最低的云向量作为正负理想云向量.构建决策云矩阵如下:

(11)


(12)
(13)
(14)

(15)
2.3 综合性能评估系统实现
CompactRIO系统中FPGA机箱高速访问外接I/O模块,处理需要高速逻辑与精密定时的密集任务,RT控制器实时显示与记录高质量数据.本研究利用该设备高速数据采集与控制相结合的优势,配合上位机虚拟仪器开发了智能接触器综合性能评估系统,构造如图4所示.控制模块中的器件选择耐压1 000 V、耐流20 A,目前市面上接触器的控制电压等级为24~500 V,该控制模块可以对此控制电压范围内的所有接触器进行智能控制,适用于各类智能控制策略的执行.

图4 接触器综合性能评估系统Fig.4 Contactor comprehensive performance evaluation system
3 智能接触器控制策略评估
3.1 智能接触器产品性能分析

表2 实验参数Tab.2 Experiment parameter
智能接触器产品众多,分析比较不同智能接触器产品的性能差异,并借此寻找影响产品性能的关键实验参数.选择来自3个不同厂家,容量均为40 A,尺寸重量近似的智能接触器作为测评样本.3款产品本体结构不同,价格为厂家C>厂家A>厂家B.实验参数如表2所示,考虑负载不同功率因数、控制电压交直流下不同电压大小、不同安装倾斜角度来模拟实际运行情况.
正交实验法是一种多因素多水平情况下高效经济的实验设计方法,可以有效减小实验次数,并通过实验数据分析出实验的关键影响因素.本文实验中涉及功率因数、控制电压、倾斜角度3个变量,试品的额定控制电压为AC/DC 100~250V,额定倾斜角度范围为-20°~20°,阻感性负载,设计正交实验因素水平表.
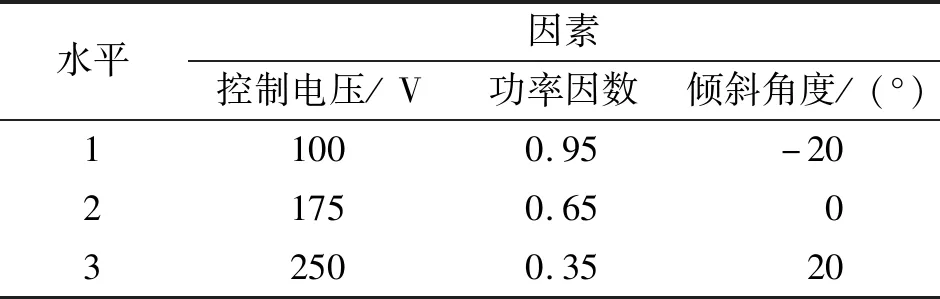
表3 各因素水平表Tab.3 Level table of each factor
若在全部工况下进行实验,每类产品将进行54组实验,采用正交实验法,以L9(33)正交表作为实验指导,如表4所示,每个样本的实验组数减小到18组.
评估结果以雷达图形式表示,图中1~9表示实验组别标号,颜色深浅表示评估结果,中心颜色最深处评估结果为0,最边缘处评估结果值为1.观察一级指标评估结果,如图5所示.产品C在3款产品中性能表现最为出色,尤其是在交流吸合过程优势显著.产品B在交流情况下吸持与分断阶段表现尚佳,但吸合阶段表现较差,在直流情况下出现拒动作.产品A在交流情况下性能表现最差,在直流情况下较差.各试品各运动阶段直流下的性能表现都明显低于交流评估结果.
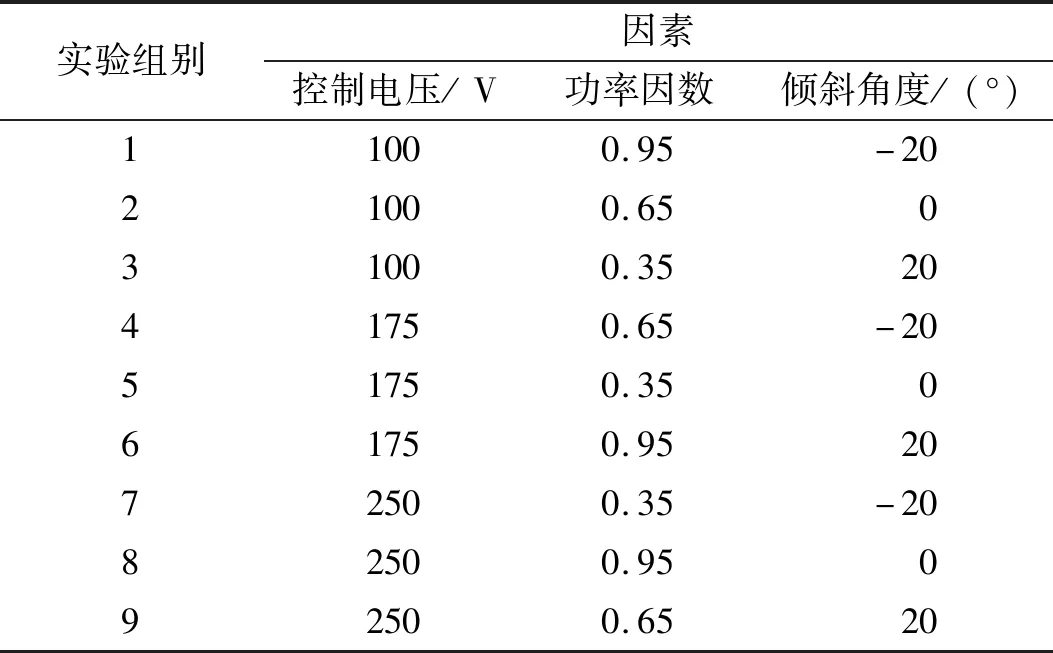
表4 L9(33)正交表Tab.4 Orthogonal array of L9(33)
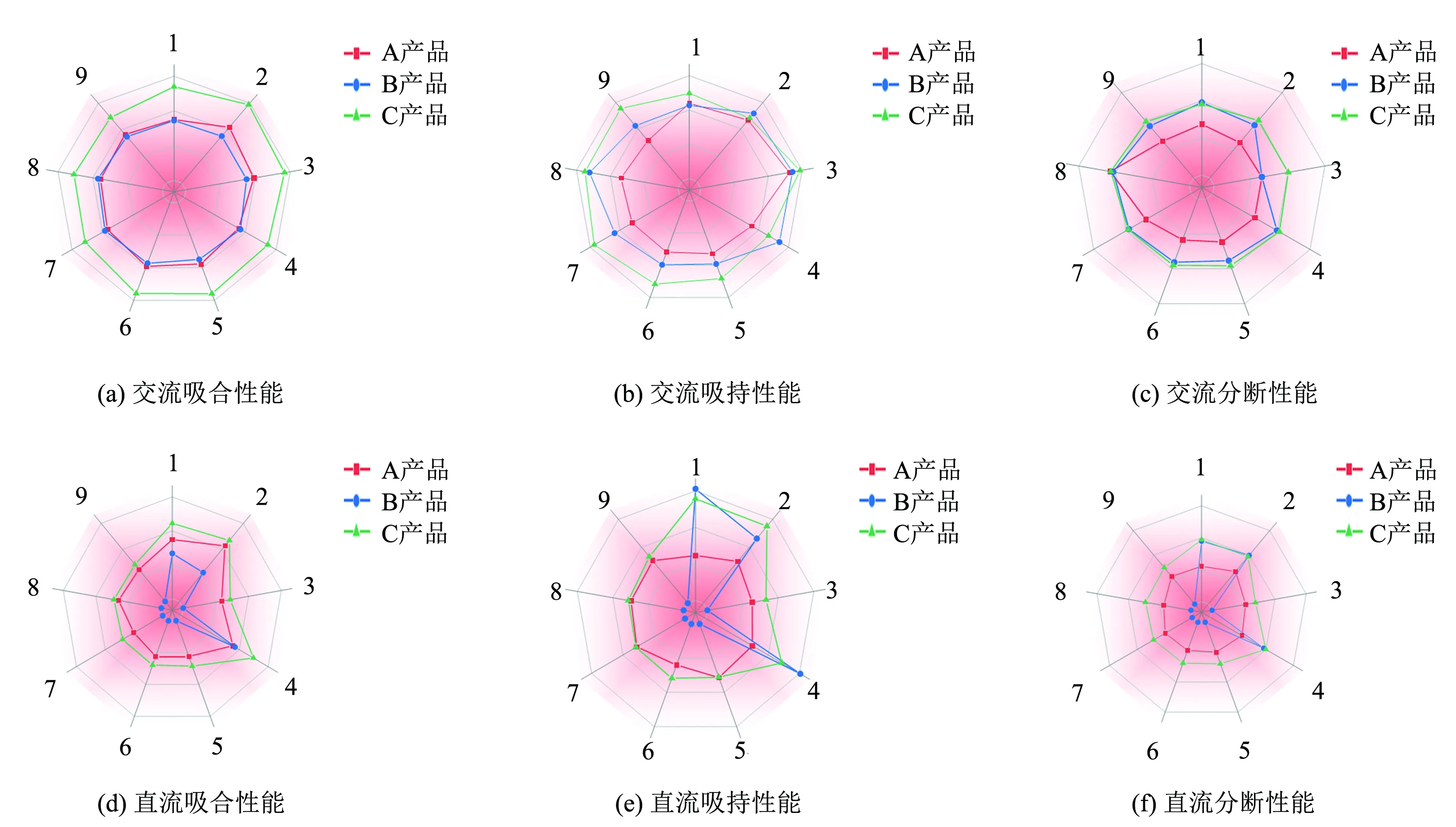
图5 一级指标评估结果Fig.5 Evaluation results of first-level indicators
分析正交实验中各因素对评估结果的影响,结果如表5所示,在两自由度均为2的情况下F临界值为19,F值超出19表示变异来源与评估结果有显著关联.评估最差值出现在控制电压250 V,功率因数0.35,倾斜角度20°时,即该实验参数下的性能表现评估结果为最低值.

表5 方差分析表Tab.5 DC experimental analysis of variance
3.2 智能接触器控制策略匹配
在对3款智能接触器产品进行比较后发现,若不计入成本,产品C无疑是最优的选择,但在实际应用中,除性能表现外还需考虑价格因素,产品C价格过高,与产品A、B相比性价比明显较低.若能在较低结构生产成本的同时拥有更高的产品性能无疑是更好的方案.故选择产品B的本体结构作为对象,研究与之最为匹配的控制策略,备选控制方案见表6.
以4种吸合过程智能控制方案作为研究对象.方案1为电压开环控制,根据输入电压大小设置恒定的PWM占空比.方案2为线圈电流闭环控制策略,使线圈电流维持在恒定值.方案3为多级分段电流闭环控制策略,在方案2基础上,将吸合过程分为几个阶段,选择不同的线圈电流参考值[15].方案4为基于磁链变量的闭环控制策略,以磁链大小作为准则调节线圈电流[16].
以3种吸持过程智能控制方案作为研究对象.方案1为PID控制,设置PID各环节的控制参数以降低噪声.方案2为线圈电流闭环控制策略,以恒定的参考电流值使接触器稳定吸持.方案3为多变量反馈吸持控制策略[17],将线圈电流和母线电压实时反馈,自动更新占空比.
分断阶段的控制策略主要有两种,方案1在硬件电路中添加快速去磁电路,使开关快速分断.方案2即零电流分断技术,利用触头电流数据在电流零点进行分断,可以有效减小燃弧时间与燃弧能量,提高触头的电寿命[18].
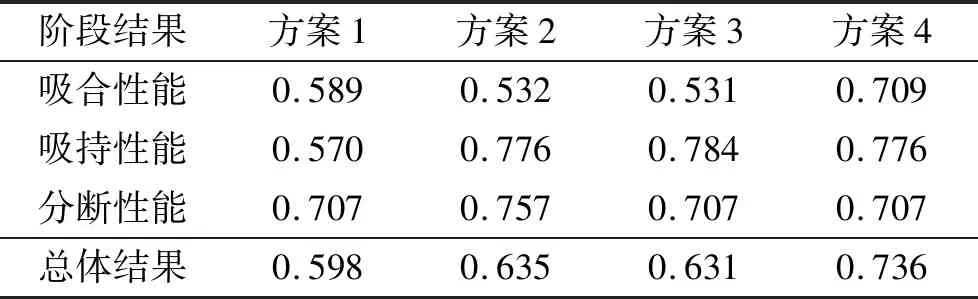
表7 控制方案评估结果Tab.7 Control plan evaluation results
各控制策略的评估结果如表7所示.吸合阶段,方案4评估值最高,判定为最优吸合方案.吸持阶段,多变量反馈吸持控制策略与线圈电流闭环控制均取得较高分数.但多变量反馈吸持控制策略可以自适应调整线圈电流吸持参考值,不依赖于开关的本体结构参数,在复杂工况下也可以稳定吸持,判定为最优吸持方案.分断阶段,零电流控制策略评估结果优于直接快速分断.零电流控制策略的实现需要等待触头电流零点再添加相应的延时,从而延长了接触器分断指令下达后的断开时间,但从评估结果可以看出,这样的延长还是利大于弊的.
4 结语
本文构建智能接触器性能评估系统,在考虑控制特性的情况下对智能接触器全运动过程进行评估,分析智能接触器性能表现,指导控制策略与本体结构进行最优匹配.基于云模型理论构建的智能接触器性能评估模型,将定性指标与定量指标统一度量,充分反映各运行参数的数学特性,使得评估结果具有更高可信度.对3个厂家智能接触器产品进行性能评估分析,评估结果显示,交直流通用的智能接触器在直流控制下面临更大挑战,性能表现不如交流控制环境,且易受各实验参数的影响.据此结论在直流控制下研究智能控制方案,以寻找最优控制方案与样机结构相匹配,最终确定吸合阶段采用基于磁链变量的闭环控制策略,吸持阶段采用多变量反馈吸持控制策略,分断阶段采用零电流分断控制策略为最佳控制方案.
