基于MCD的自动化装配站的虚拟仿真设计
2022-11-24顾宇峰王杰
顾宇峰 王杰
1. 江苏联合职业技术学院苏州工业园区分院,江苏苏州 215123;2.江苏汇博机器人技术股份有限公司,江苏苏州 215000
0 前言
《职业教育示范性虚拟仿真实训基地建设指南》中指出,要大力发展虚拟仿真实训基地建设,解决实训教学过程中高投入、高损耗、高风险及难实施、难观摩、难再现的“三高三难”痛点和难点[1]。装备制造类专业自动化设备投入大、损耗高、教学难观测,特别是全国职业院校技能竞赛工业机器人技术应用、机器人系统集成等赛项,一台设备在60万以上,购置10台以上设备进行教学是不可能的。本文以工业机器人技术应用赛项设备为对象,进行MCD机电一体化概念设计[2],采用KEBA科控的工业机器人虚拟仿真软件KeMotion3进行机器人虚拟仿真系统编程设计,采用西门子博图V15软件进行PLC虚拟仿真系统编程设计,通过OPC Server软件KEPServerEX 6 Configuration软件配置,MCD软件中进行外部信号配置与信号映射,最终调试完成自动化装配站的虚拟仿真。
1 工作原理
1.1 设备说明
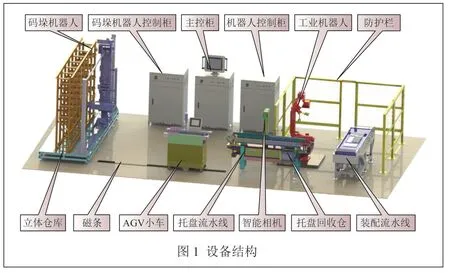
“工业机器人技术应用”竞赛在“工业机器人技术应用实训平台”上进行,该设备由工业机器人、自主导航AGV机器人、智能2D相机、托盘流水线、装配流水线和码垛机立体仓库等6个单元组成[3],如图1所示。系统的主要工作目标是实现机器人关节的混流生产,基本流程为:码垛机器人从立体仓库中取出工件放置于自主导航AGV机器人上部输送线;自主导航AGV机器人输送至托盘流水线上,利用智能2D视觉系统引导工业机器人对托盘中放置的工件进行分选识别;接着,工业机器人进行混流装配;装配完成后,工业机器人抓取成品套件放置于自主导航AGV机器人上部输送线上;自主导航AGV机器人转运至立体仓库入库位置,完成成品套件的入库作业[4]。
1.2 MCD说明
机电一体化概念设计解决方案(MCD)是一种全新解决方案,适用于机电一体化产品的概念设计[5]。借助该软件,可对包含多物理场以及通常存在于机电一体化产品中的自动化相关行为的概念进行3D建模和仿真,MCD支持功能设计方法,可集成上游和下游工程领域,包括需求管理、机械设计、电气设计以及软件、自动化工程。此次设计将大赛设备进行三维建模,然后导入到MCD软件中,进行合理布局,如图2所示。

2 系统软件设计
2.1 MCD配置和仿真
根据实际的运动关系,在机电虚拟调试软件中设置刚体、碰撞体、运动副、位置控制、传感器等,创建竞赛平台的模型。在MCD软件中完成AGV、板链单元-备品库、板链单元-成品库、板链单元-输送、板链单元-装配工位、倍速链单元、基座、电机、减速器、输出法兰、机器人单元-ER20、机器人单元-双吸盘工具、输送板链单元、托盘、移动小车、仓储的参数配置。以AGV小车为例,需要进行刚体、滑动副、位置控制、传输面、碰撞材料等参数配置,如图3所示。
2.2 机器人虚拟仿真软件编程
采用工业机器人虚拟仿真软件KeMotion3编程[6],通过模块化编程方式,编写主程序MAIN、机器人回原点子程序HOME、取放工件的子程序、工件装配的子程序、取放托盘的子程序、成品入库的子程序、点位示教的子程序等,通过主程序调用子程序的方式完成程序设计,点位示教子程序中,需要操作虚拟仿真软件示教器在MCD软件中进行点位的示教。图4为工件装配时的部分程序和场景。
2.3 博图软件编程与配置
采用西门子博图V15软件进行编程[7],采用模块化的编程方法建立主程序MAIN(OB1),新建组IO、组MCD、组传送带、组AGV、组机器人、组码垛机、组相机等。在组模块下再新建子程序,例如,组MCD下新建子程序MCD主程序、MCD通讯处理、新建数据块MCD通讯数据DB104,如图5所示。




3 系统通讯参数配置
3.1 OPC Server软件参数配置
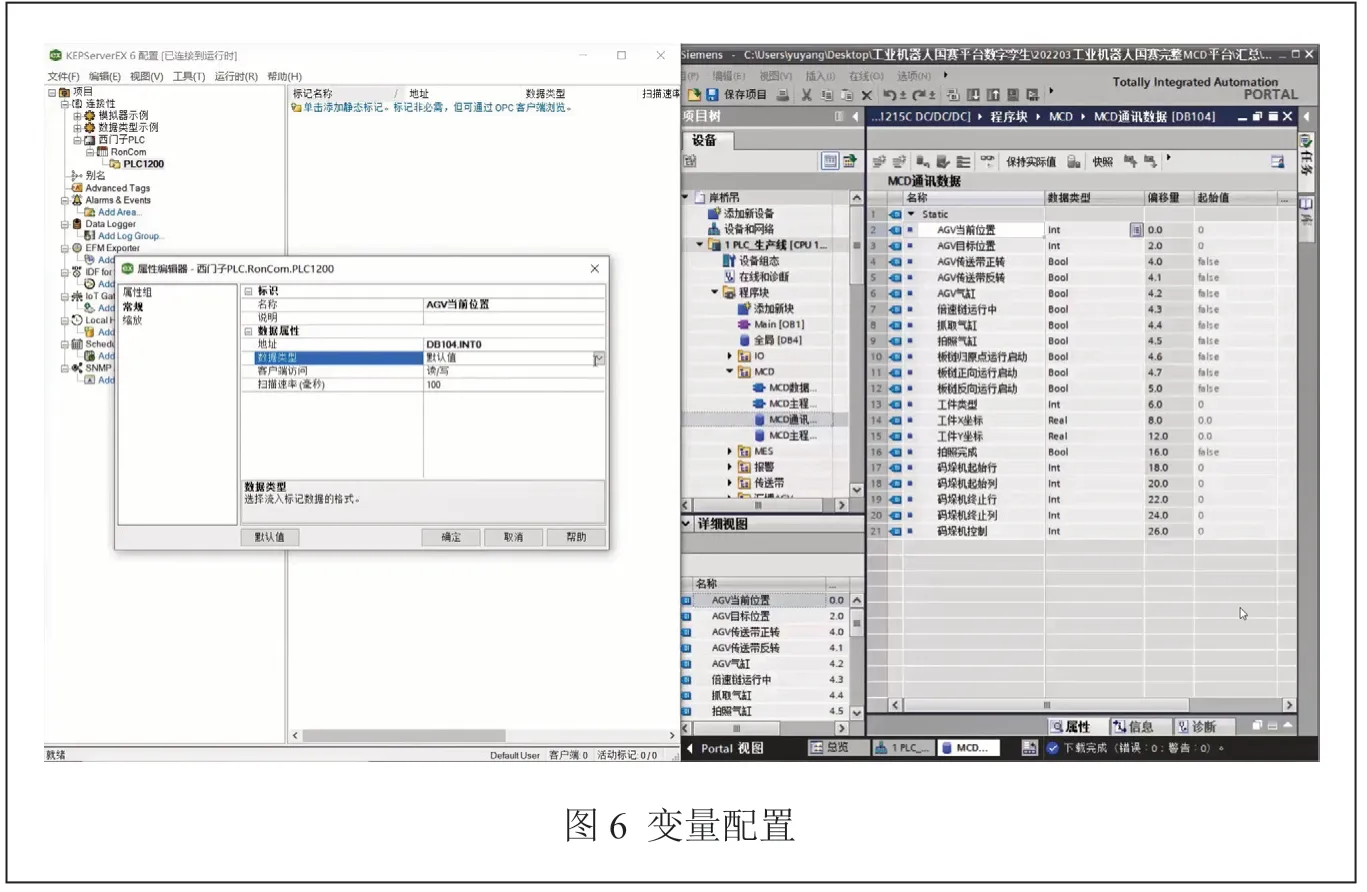
根据系统虚拟仿真测试要求,使用OPC Server软 件KEPServerEX 6 Configuration进行通讯参数配置,通过在该软件中建立变量,与西门子博图软件中的MCD通讯数据进行关联,达到数据通讯测试的作用。具体参数配置步骤如下:首先,在OPC软件中选择要创建的通道类型,选择“siemens TCP/IP Ethernet”,网络适配器选择计算机以太网通讯网卡,添加设备,选择型号为“S7-1200”,ID输入PLC以太网地址;然后,打开博图软件,观测MCD通讯数据中的变量名称和地址,在OPC软件中新建标记组,将MCD通讯数据中的变量名称和地址依次添加到OPC属性编辑器中,如图6所示,例如,观测到博图软件中MCD通讯数据中变量名称为AGV当前位置,数据类型为INT,则添加到OPC中名称也应为AGV当前位置,地址则输入“DB104.INT0”,完成所有MCD通讯数据中所有变量的添加,则变量配置结束。
3.2 MCD软件外部信号配置与信号映射
根据系统虚拟仿真测试的要求,需要在机电虚拟调试软件中配置对应的通信[8],根据通信方式对应的通信协议配置对应的信号,将配置好的信号和模型驱动接口建立一一映射的关系。配置步骤如下:首先,在MCD软件中点击外部信号配置,选择OPC DA通讯,点击 添 加Kepware.KEPServerEX.V6,在OPC DA中将所有信号进行勾选,点击确定;然后,在外部信号配置中选择信号映射,将MCD信号和外部信号进行变量关联,如图7所示,关联所有外部信号,则信号配置结束。
4 仿真测试
4.1 测试过程
在工业机器人虚拟仿真软件中编写好程序,并且在MCD中示教好点后,点击仿真播放;将虚拟仿真软件示教器设置在手动挡,然后手动单步调试程序,观测MCD中机器人搬运和装配工件的单步运行情况;运行正确后,就可以将虚拟示教器设置在自动档,按下运行按钮,测试自动运行。
将博途PLC程序下载到虚拟PLC中,然后将虚拟PLC运行,MCD软件点击仿真播放,在博途软件中输入立体仓库和AGV小车位置号,测试立体仓库和AGV小车虚拟运行的情况。
运行虚拟PLC,将虚拟示教器设置在远程端,播放MCD软件,进行设备整体虚拟测试。工业机器人竞赛平台自动运行,执行工件出库、AGV输送至托盘流水线、工件检测、工业机器人装配、工业机器人拆解、AGV输送至立体仓库、工件入库等全流程。
如果以上仿真测试出现故障,应立即停止仿真,排除故障后再调试,直至运行正常并稳定,则测试结束。
4.2 测试结果
在MCD配置和仿真不变的基础上,修改博途软件编程,即可改变立体仓库出库和入库的库位及仿真、自主导航AGV机器人的位置及仿真;修改工业机器人虚拟仿真软件编程,即可改变工件装配和拆解的流程。经过多次测试,证明该系统具备了自动化装配站虚拟仿真功能,运行稳定,具有安全性。
5 结束语
基于MCD的自动化装配站的虚拟仿真设计,将全国高职组“工业机器人技术应用”赛项设备虚拟化,将虚拟化的PLC、工业机器人示教器、MCD设备进行了软件在环的虚拟调试,很好地解决了实训教学过程中的“三高三难”痛点和难点。
该系统使用MCD软件将导入的三维模型设备进行参数配置,通过工业机器人虚拟仿真软件示教器进行编程,通过与MCD联合仿真完成工业机器人点位示教,通过博图PLC进行程序编写,通过OPC服务器软件进行参数配置,再通过MCD配置完成信号映射,最终完成系统的整体虚拟测试。
经过多次测试,证明该系统具备了自动化装配站虚拟仿真功能,运行稳定,具有安全性。
