PMSM调速系统的新型指数趋近率滑模控制
2022-11-22宋桂英杨博伟张泽华
刘 畅,宋桂英*,杨博伟,张泽华
(1.省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学 电气工程学院),天津 300130;2.河北省电磁场与电器可靠性重点实验室(河北工业大学 电气工程学院),天津 300130)
永磁同步电机(permanent magnet synchronous motor, 简称PMSM)因功率密度大、控制简单、转矩输出平稳等优点而广泛应用于载人飞行器、高精度数控机床、机器人等领域[1-4].PMSM为非线性、多变量、强耦合的复杂系统,比例积分(proportional integral,简称PI)控制不能满足PMSM调速系统的控制要求.为了解决PI控制存在的问题,研究人员将一些新型智能控制应用于PMSM的矢量控制[5-7],其中滑模控制因鲁棒性强、响应迅速、对内部参数及外部扰动不敏感等优点而广泛应用于PMSM调速系统[8-10].抖振是滑模控制的主要缺点,趋近率控制是解决抖振问题的途径之一,因而成为研究热点.文献[11]在幂次趋近率中加入终端因子,使被控对象能全局收敛,加快了趋近速度且减小了抖振,但是参数确定较复杂.文献[12]把模糊控制引入滑模控制,能自适应改变滑模控制参数,使抖振得到抑制,但模糊控制算法复杂、实现难度大.文献[13]提出了一种基于反双曲正弦函数的指数趋近率,把系统状态变量加至反双曲正弦函数,以改变趋近率参数,有效降低了抖振.文献[14]基于分段函数设计了一种新型趋近率,该趋近率使系统的趋近速度随状态变量自适应改变,减小了稳态误差,但函数边界固定、系统抗扰动能力差.文献[15]基于积分型滑模面设计滑模控制器,解决了状态变量微分导致的高频噪声问题,系统的抗干扰能力得到提升.
该文在传统指数趋近率的基础上提出一种新型指数趋近率,基于该趋近率设计滑模控制器.另外,设计一种扰动观测器,把扰动观测结果反馈至滑模控制器,以降低外部扰动对控制系统的影响.通过Simulink仿真和RT-LAB半实物平台验证新型指数趋近率滑模控制器的有效性.
1 PMSM的数学模型
旋转坐标系下PMSM的数学模型为
(1)
其中:ud,uq分别为电机定子的直轴、交轴电压;id,iq分别为电机定子的直轴、交轴电流;Ld,Lq分别为电机的直轴、交轴电感;Rs为定子电阻;ωe为电机的电角速度;φf为电机的永磁体磁链.
永磁同步电机电磁转矩为
(2)
其中:pn为电机的磁极对数.
PMSM的动力学方程为
(3)
其中:Te为电磁转矩,B为摩擦因数,J为转动惯量,ωm为电机的机械角速度,TL为负载转矩.
2 新型指数趋近率
2.1 传统指数趋近率
传统指数趋近率由指数项和等速项组成,其表达式为
(4)
其中:ε为等速项系数,k为指数项系数,s为滑模面函数.
滑模控制器远离滑模面时,指数项和等速项共同作用使系统趋向滑模面的速度变快;滑模控制器到达滑模面时,在等速项作用下系统滑向原点.
滑模控制器接近滑模面时,传统指数趋近率可改写为
(5)
对趋近率进行离散后,可得
s(l+1)-s(l)=-εTsgns,
(6)
其中:l为采样次数,T为采样周期.
当滑模控制器接近滑模面时,s(l)=0+或0-,在符号函数作用下滑模控制器在滑模面附近来回切换,形成切换带,系统因此出现抖振.
2.2 新型指数趋近率
该文在传统指数趋近率的基础上,提出了新型指数趋近率,其表达式为
(7)

2.3 新型指数趋近率的控制性能
为了分析新型指数趋近率的控制性能,使用如下的典型系统方程
(8)
其中:x=[x1,x2]T,x1,x2为系统状态变量;u为新型指数趋近率的控制函数.
滑模面函数s=cx,求导得
(9)
由式(7)~(9)可得
u=(cB)-1[-cAx-f(x1,s)sgns-ksβ],
(10)

相同参数条件下,传统指数趋近率及新型趋近率的控制性能如图1,2所示.
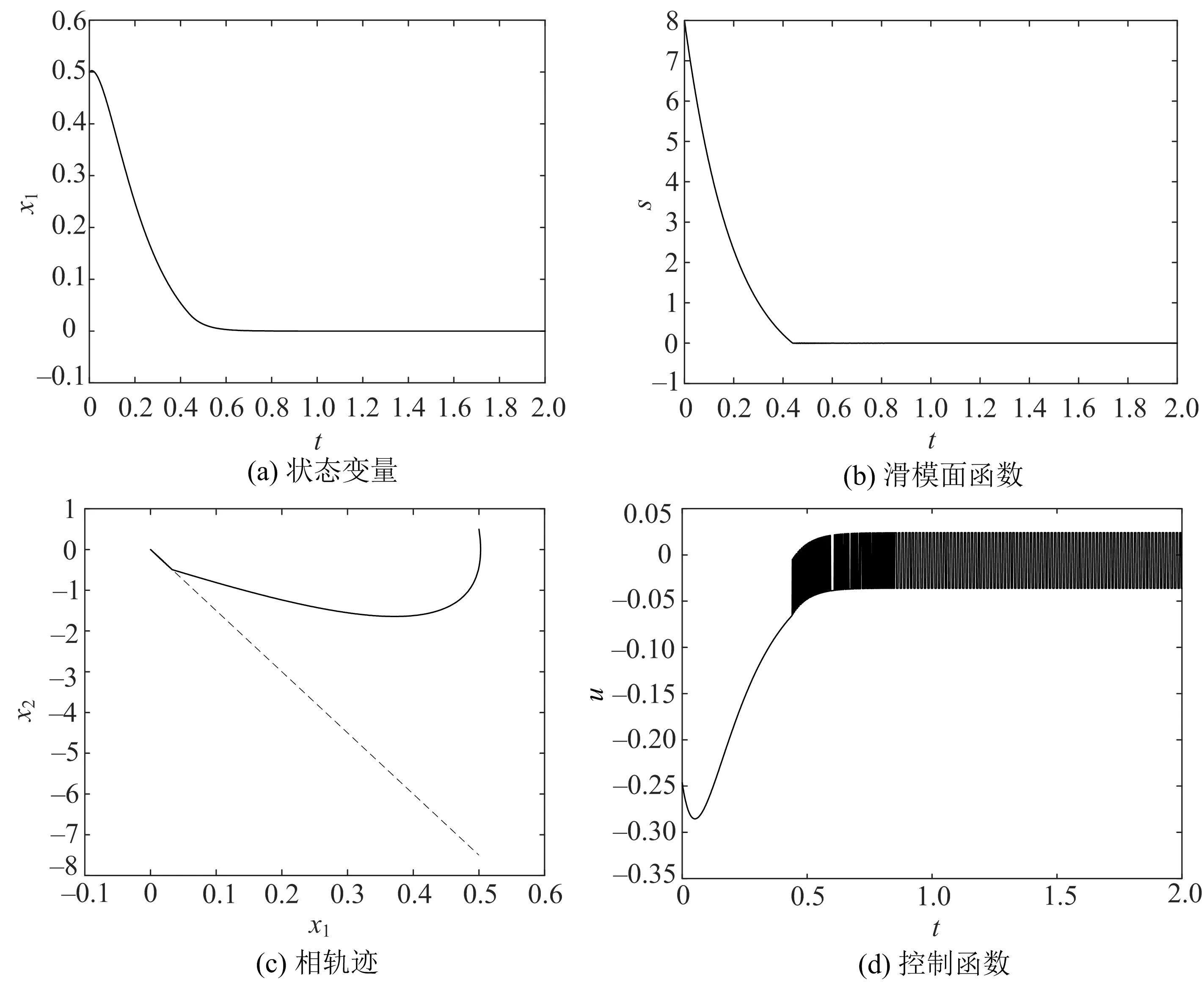
图1 传统指数趋近率的控制性能
由图1(a),2(a)可知,新型指数趋近率的系统状态变量x1收敛至原点的时间比传统指数趋近率的状态变量x1收敛至原点的时间短.由图1(b),(c)和图2(b),(c)可知,新型指数趋近率的滑模控制器达滑模面的时间比传统指数趋近率的滑模控制器达滑模面的时间短.由图1(d),2(d)可知,相对于传统指数趋近率,新型指数趋近率的系统输出能力更强、抖振减弱更明显.
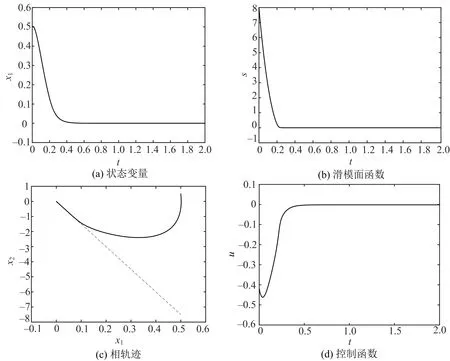
图2 新型指数趋近率的控制性能
3 新型指数趋近率滑模控制器
3.1 滑模控制器的设计
把交轴电流iq作为滑模控制器的输出,把机械角速度的跟踪误差定义为状态变量.基于新型指数趋近律设计了滑模控制器,该滑模控制器状态变量x1,x2的表达式为
(11)
滑模面函数对滑模控制器的性能有重要影响,积分型滑模面可解决因状态变量的微分而带来的高频噪声问题,故该文选取积分型滑模面函数作为滑模面函数,其表达式为

(12)
其中:c1为可调正数.
对式(12)求导,可得
(13)
结合式(2)~(3),(13)可得滑模控制器输出的交轴电流为
(14)
考虑参数变化以及外部负载扰动后,式(14)可改写为
(15)
其中:F(t)为外部扰动.
3.2 滑模控制器的稳定性
为分析该文设计的滑模控制器的稳定性,选取李雅普诺夫方程为
(16)
对式(16)求导,得
(17)
由式(7),(17),可得
(18)
3.3 扰动观测器的设计
外部扰动F(t)对控制系统带来影响,因此需设计扰动观测器对外部扰动进行观测,并将观测值反馈至滑模控制器,以降低外部扰动对滑模控制器性能的影响.
电机的电气时间常数远小于机械时间常数,可近似认为一个采样周期内负载转矩是恒定的,即
(19)
进而可得
(20)
考虑外部扰动F(t)后,由式(3)可得
(21)
扰动观测器的状态方程为
(22)

由式(21),(22)得观测误差方程为
(23)
其中:e1为机械角速度跟踪误差,e2为扰动观测误差.
该文选取的滑模面函数为
(24)
其中:c2为可调正数.
对式(24)求导可得
(25)
其中:ε1为趋近率的切换增益.

(26)
(27)
(28)
由式(28)可得
(29)
当g<0时,扰动观测误差会逐渐减小至0.
选取李雅普诺夫函数为
(30)
对式(30)求导可得
(31)
由式(23)~(25)可得
(32)
(33)
4 Simulink仿真结果

图3 新型指数趋近率滑模控制系统的仿真模型
永磁同步电机的参数设置如表1所示.另外,设置直流电侧的电压为30 V,开关频率及采样频率均为10 kHz.
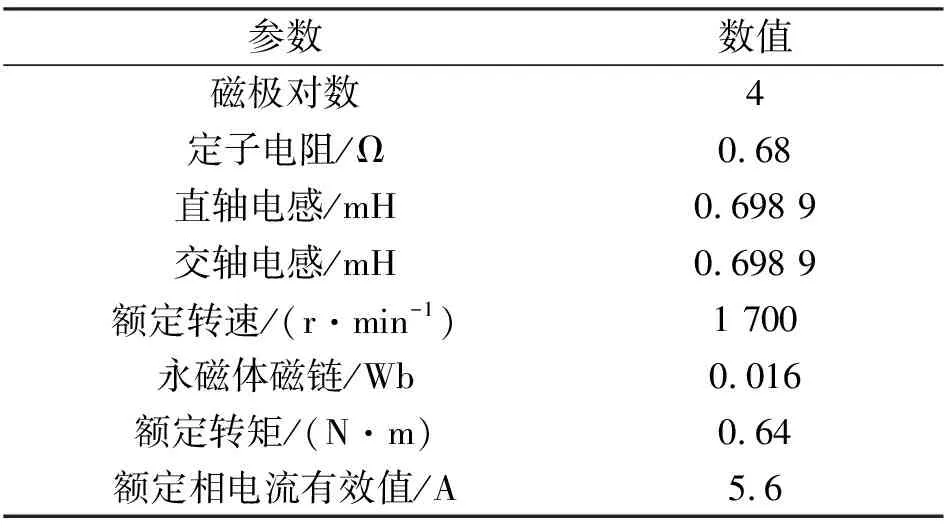
表1 永磁同步电机参数
仿真的相关设置为:仿真时间为0.4 s;id=0;电机起始转矩为0.05 N·m,运行至0.2 s突增至0.15 N·m.将新型指数趋近率滑模控制与PI控制及传统指数趋近率滑模控制进行对比,以证明新型指数趋近率滑模控制的有效性.
图4为3种控制下PMSM调速系统启动时的转速响应.图5为3种控制下PMSM调速系统负载突增时的转速响应.
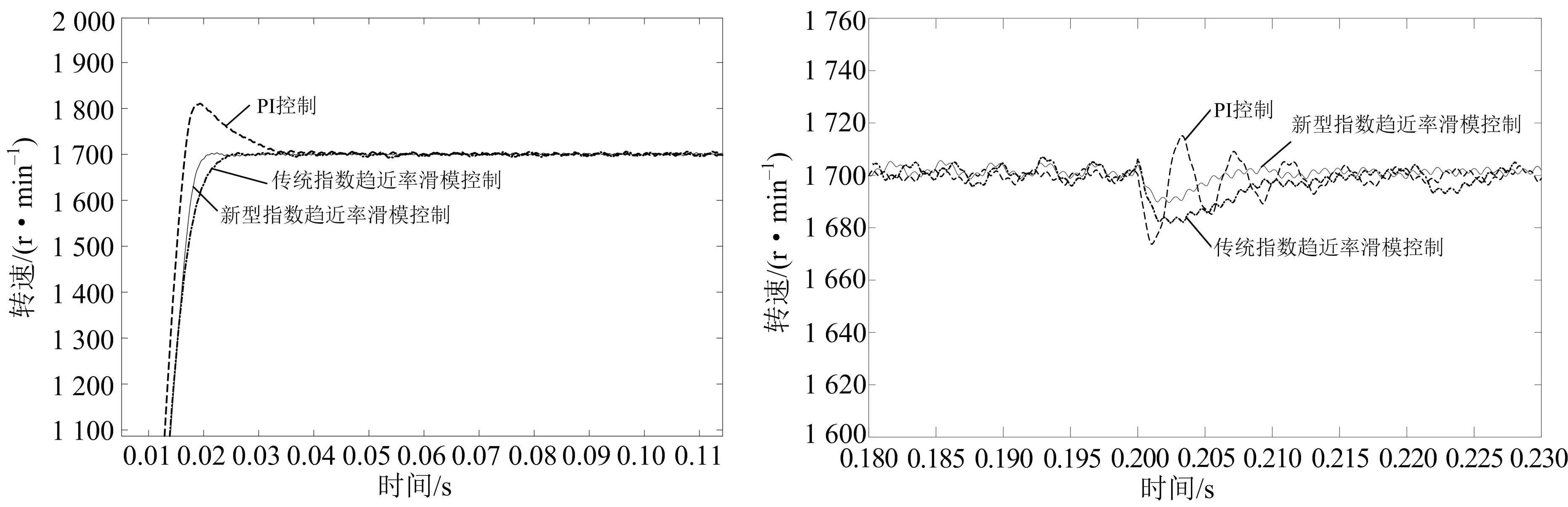
图4 3种控制下PMSM调速系统启动时的转速响应 图5 3种控制下PMSM调速系统负载突增时的转速响应
由图4可知,PMSM调速系统启动时,新型指数趋近率控制的转速跟踪性能优于传统指数趋近率控制和PI控制的转速跟踪性能.由图5可知,PMSM调速系统负载突增时,相对于传统指数趋近率控制和PI控制,新型指数趋近率控制转速波动最小、抗扰动能力最强.
图6为PMSM调速系统的动态转矩响应.由图6可知,相对于PI控制,新型指数趋近率滑模控制动态转矩波动较小、响应快.图7为PMSM调速系统启动及负载突增时的电流响应.由图7可知,PMSM调速系统启动及负载突增时,相对于PI控制,新型指数趋近率滑模控制电流响应更快更平稳,表明其具有更好的抗干扰性能.
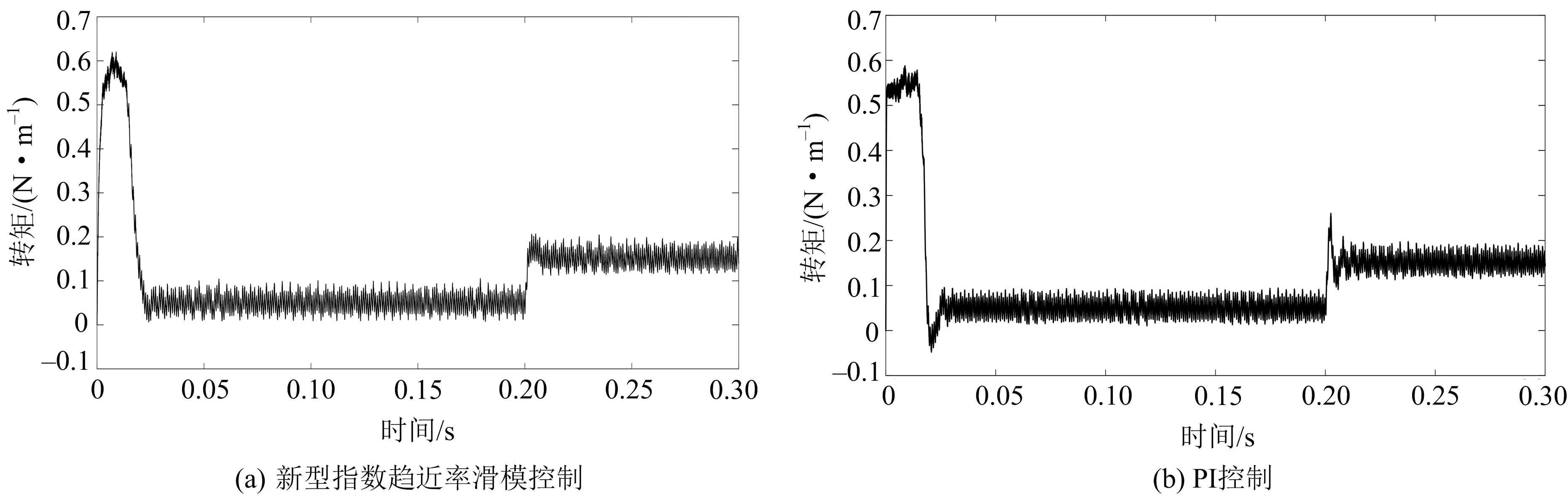
图6 PMSM调速系统的动态转矩响应
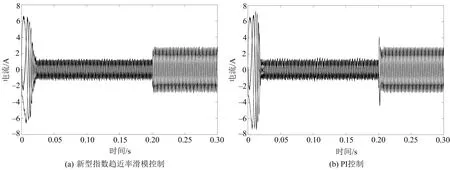
图7 PMSM调速系统启动及负载突增时的电流响应
图8为新型指数趋近率滑模控制的负载转矩观测结果.由图8可知,新型指数趋近率滑模控制转矩观测速度较快、结果较准确.
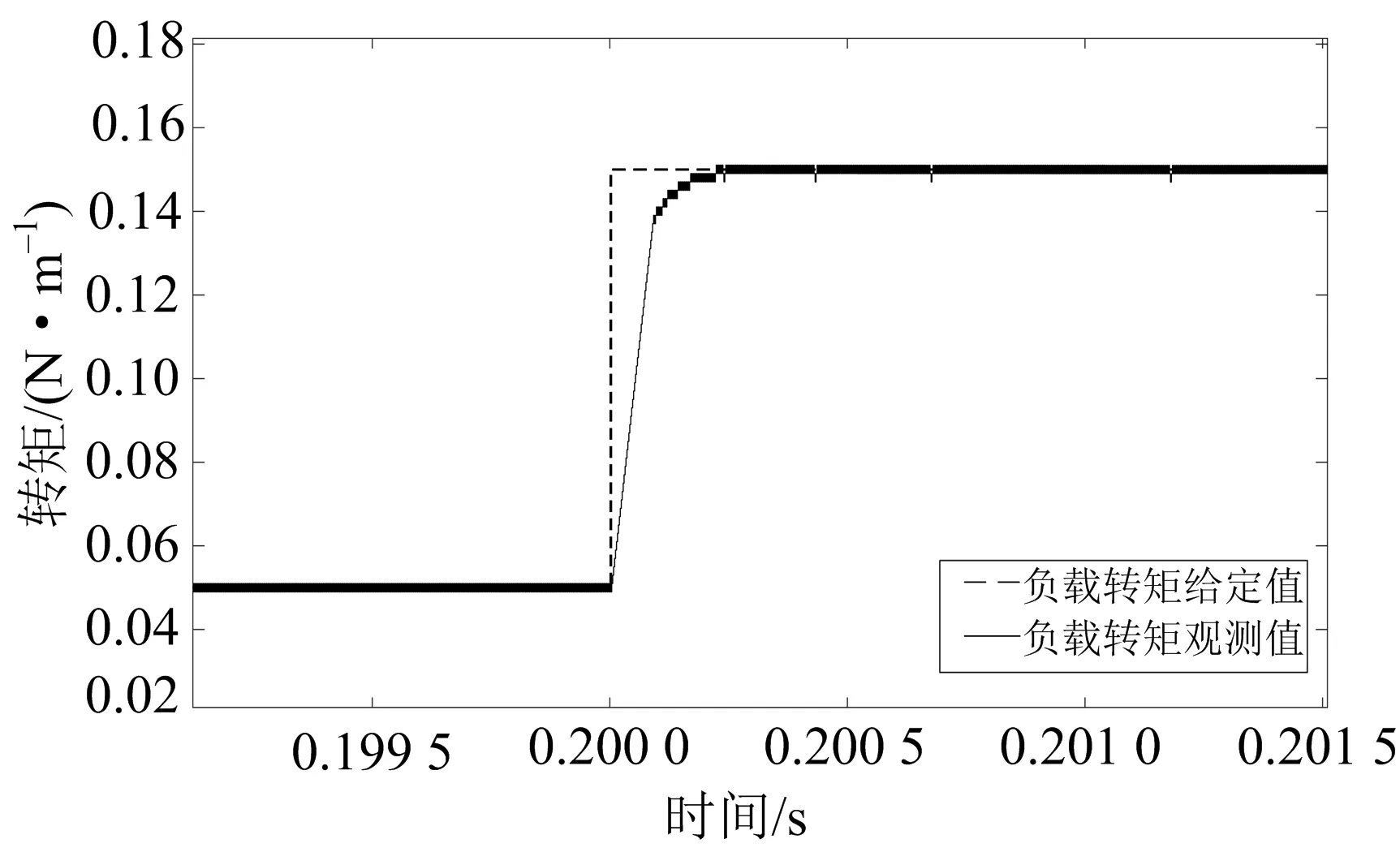
图8 新型指数趋近率滑模控制的负载转矩观测结果
图9为PMSM调速系统的稳态转速曲线.由图9可知,相对于传统指数趋近率控制,新型指数趋近率滑模控制稳态转速波动较小、抖振得到更明显的抑制.
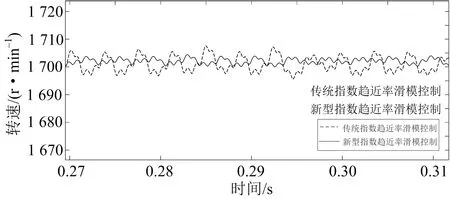
图9 PMSM调速系统的稳态转速曲线
5 RT-LAB半实物平台的实验结果
在RT-LAB半实物平台是一个实时平台,相对于Simulink更接近实际情况.实验相关设置与Simulink仿真设置相同.图10~13均为实验时示波器上显示的相关图像.
图10为2种控制下PMSM调速系统启动时的转速响应.由图10可知,PMSM调速系统启动时,相对于PI控制,新型指数趋近率控制转速跟踪性能更优、转速到达设定值的时间更短、响应更迅速.
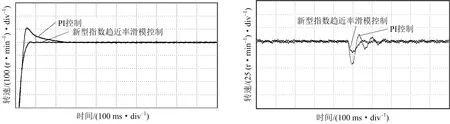
图10 2种控制下PMSM调速系统启动时的转速响应 图11 2种控制下PMSM调速系统负载突增时的转速响应
图11为2种控制下PMSM调速系统负载突增时的转速响应.由图11可知,PMSM调速负载突增时,相对于PI控制,新型指数趋近率控制转速波动更小、转速回到设定值时间更短.
2种控制下PMSM调速系统启动及负载突增时的电流响应如图12所示.由图12可知,负载突增时,新型指数趋近率滑模控制相对于PI控制电流响应更平稳.
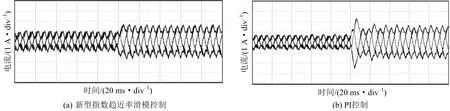
图12 2种控制下PMSM调速系统启动及负载突增时的电流响应
图13为2种控制下PMSM调速系统的稳态交直轴电流.由图13可知,相对于传统指数趋近律控制,新型指数趋近律控制稳态交直轴电流波动更小,表明其能更有效地抑制抖振.

图13 2种控制下PMSM调速系统的稳态交直轴电流
6 结束语
该文在传统指数趋近率的基础上提出了一种新型指数趋近率,基于该趋近率设计了PMSM调速系统的滑模控制器.Simulink仿真结果表明:PMSM调速系统负载突增时,相对于传统指数趋近率控制和PI控制,新型指数趋近率控制转速波动最小、抗扰动能力最强;相对于PI控制,新型指数趋近率滑模控制电流响应更快更平稳;相对于传统指数趋近率控制,新型指数趋近率滑模控制稳态转速波动较小、抖振得到更明显的抑制.RT-LAB半实物平台的实验结果表明:PMSM调速系统负载突增时,相对于PI控制,新型指数趋近率控制转速波动更小、电流响应更平稳;相对于传统指数趋近律控制,新型指数趋近律控制稳态交直轴电流波动更小,表明其能更有效地抑制抖振.因此,该文设计的新型指数趋近律控制器具有有效性.
