掘进机远程虚拟自动截割控制系统的应用研究
2022-11-12杨文龙
杨文龙
(阳煤集团寿阳开元矿业有限责任公司, 山西 晋中 045400)
引言
掘进机是煤矿井下巷道掘进的关键设备,具有对井下复杂地质条件适应性强、截割可靠性高的优点,掘进机在掘进作业中主要是依靠人工在驾驶室的操作控制,但井下巷道内的截割作业环境较为复杂、粉尘浓度大、截割作业视线差,导致司机注意力需高度集中,劳动强度大、易疲劳,给井下的巷道掘进作业带来了较大的安全隐患。
随着井下综采技术水平的不断提升,实现井下“无人化”掘进已经成为煤矿综采作业的发展趋势,因此本文提出了一种新的掘进机远程虚拟自动截割控制系统,首先建立掘进机和井下巷道的三维空间模型,再通过虚拟现实控制技术,建立虚拟掘进机和井下掘进机实物之间的联动控制系统,实现了掘进机的远程虚拟控制。根据实际应用表明,虚拟机截割轨迹和掘进机截割轨迹的重合度高达99.4%,为实现井下的无人化掘进控制奠定了基础。
1 虚拟操作控制系统
虚拟现实技术也称VR 技术,是一种具有高真实性、高交互性的控制技术,包括掘进机控制子系统及漫游控制子系统两个部分。在工作时控制人员在控制中心给虚拟系统的掘进机发出控制指令,控制虚拟掘进机的运行,同时虚拟掘进机的运行姿态会形成一个调整指令发送到控制中心的数据单元,由数据单元直接对井下掘进机发出调整控制指令,控制掘进机的运行姿态。设置在掘进机上的各类传感器将掘进机的运行姿态数据实时传递到控制中心,将实际的姿态和理论姿态进行对比,获取姿态偏差量,然后再对掘进机的掘进姿态进行修正,确保实际运行状态符合控制姿态调整数据。该虚拟操作控制理论原理如图1 所示。
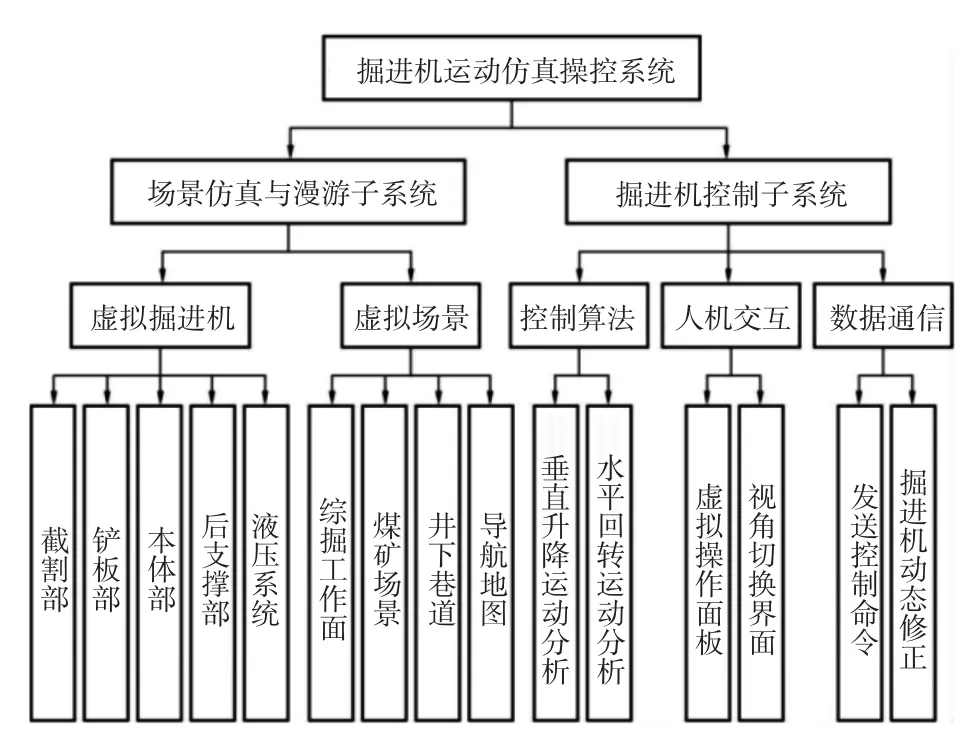
图1 虚拟操作理论控制原理示意图
2 虚拟截割控制子系统设计
掘进机的虚拟操作控制系统包括了掘进机控制子系统及漫游控制子系统两个部分,其共同作用下保证了掘进机运行控制的可靠性。
漫游控制子系统主要是通过三维建模的方式建立掘进机、巷道的虚拟模型,利用PROE 三维建模软件完成建模后再利用3ds Max 渲染[1],系统的连接可以采用HTC VIVE 眼睛,通过交互式的虚拟眼睛来完成对掘进机运行状态的虚拟控制。
掘进机子控制系统,对掘进机的实时控制采用了“虚实同步、人工协同”的控制理论[2],整个控制子系统主要包括了数据通信模块、数据处理模块、人机交互模块3 个部分,其整体结构如图2 所示。

图2 虚拟现实远程控制结构示意图
数据通信模块,主要用于保证虚拟现实系统各个模块之间的数据传输,由于所需要的数据传输效率要求高,因此经过数据通信对比后,在控制中心PLC 和虚拟平台之间采用了RS485 总线通信控制[3],采用了双回路数据通信结构,一个回路用于下发控制指令,实现对掘进机远程调控,另一个回路用于采集数据的传输和分析,提高数据信息传输的效率和可靠性。
人机交互模块[4],主要用于实现操作人员和虚拟掘进机之间的数据交换,由操作人员通过虚拟操控面板来对掘进机下发操作控制指令,虚拟机接收到指令后完成自动调整,在人机交互模块内,控制人员能够切换不同的视觉,保证对虚拟机控制的精确性。
数据处理模块主要是对所采集的各类数据进行分类汇总、分析,保证虚拟机和掘进机实物的数据同步性。
3 掘进机关键部位姿态修正
掘进机在工作的过程中需要根据实际掘进情况对掘进机的截割臂位置及截割姿态进行修正,根据系统虚拟界面内所显示的掘进机截割臂空间位置数据、截割姿态空间位置数据和存储库内的标准数据进行对比,获取掘进机在掘进作业过程中的偏差值,然后控制中心再发出位姿调节信号,对掘进机的掘进姿态进行修正,提高掘进机实际截割姿态和虚拟截割姿态的一致性[5]。
在调整过程中掘进机的位姿数据主要是通过工业相机对掘进机回转台上红外靶标的实时监测获取,在获取红外靶标图像后进行数据分析和对比得出掘进机截割机构的姿态角,然后存储在数据库内,便于系统进行及时获取,掘进机掘进作业过程中的姿态修正界面如图3 所示[6]。

图3 掘进机姿态修正示意图
4 掘进系统应用情况分析
为了对该定向掘进控制系统的实际应用效果进行验证,本文以悬臂式掘进机为研究对象,首先建立掘进机、井下巷道的三维结构模型,建立起虚拟现实控制体系,然后对悬臂式掘进机进行控制系统改造,加装各类监测传感器及控制系统,实现对井下掘进机的虚拟截割控制。利用该控制系统对掘进机的掘进作业进行控制。
在进行巷道断面截割作业的过程中,对井下掘进机截割作业时摇臂的角度数据进行采集,总共采集了1 449 个角度值,然后利用MATLAB 数值分析软件[7]对实际角度轨迹、理论角度轨迹进行分析,结果如图4 所示,在截割控制过程中真实掘进机和虚拟掘进机的姿态对比如图5 所示。

图4 截割控制数据偏差情况对比

图5 真实掘进机和虚拟掘进机姿态对比
由图5 可知,在掘进作业的过程中,井下掘进机的运行姿态和虚拟界面上掘进机的运行姿态保持了高度的一致性,通过对1 449 个角度值的对比分析,其重合性高达99.4%,表明了该掘进机远程虚拟自动截割控制系统的应用可靠和调节的精确性,为进一步实现井下“无人化”巷道掘进作业奠定了基础。
5 结论
为了解决掘进机在运行过程中采用人工控制效率低、安全性差的不足,提出了一种新的掘进机远程虚拟自动截割控制系统,建立虚拟掘进机和井下掘进机实物之间的联动控制系统,实现了掘进机的远程虚拟控制,根据实际应用表明:
1)掘进机的虚拟操作控制系统包括了掘进机控制子系统及漫游控制子系统两个部分,其共同作用下保证了掘进机运行控制的可靠性。
2)掘进机姿态调整时的位姿数据主要是通过工业相机对掘进机回转台上红外靶标的实时监测获取,监测精度高。
3)虚拟机截割轨迹和掘进机截割轨迹的重合度高达99.4%,为实现井下的无人化掘进控制奠定了基础。
(编辑:贾娟)
