紧凑型激光微水传感器的设计与研究
2022-11-12齐汝宾张施令李银华郑安平李新田柴慧娟曾晓哲王淑洁
姚 强,齐汝宾,张施令,李银华,郑安平,李新田,柴慧娟,曾晓哲,王淑洁
(1.国网重庆市电力公司电力科学研究院,重庆 401123;2.郑州轻工业大学电气信息工程学院,河南 郑州 450002; 3.河南省日立信股份有限公司,河南 郑州 450001)
1 引 言
水蒸气作为水的气态形式,渗透在人们生产生活的各个角落,而在电力领域,需要对微水含量(水分含量或水蒸气浓度或微水密度或湿度)进行严格检测与控制[1],以确保系统能够安全稳定运行和保证产品质量。如在高压开关等绝缘电气设备中,六氟化硫(SF6)气体由于具有优良的灭弧和绝缘性能以及良好的化学稳定性,是当前高压电气设备的重要绝缘介质,但在长期使用过程中,其内部微量水蒸气会在高压电弧放电等条件下与SF6气体发生反应生成腐蚀性气体,影响设备安全可靠运行[2]。在电厂发电过程中,因氢气具有较高的换热比和较低的风摩损耗而大多数发电机组使用氢气进行冷却,氢冷发电机内湿度过高,不仅危害发电机定子、转子绕组的绝缘强度,而且会使转子护环产生应力腐蚀裂纹;而氢气湿度过低,又可导致如定子端部垫块收缩和支撑环的裂纹等有害影响[3-4]。因此,在现场恶劣条件下快速、准确检测高压电气设备内部和氢冷机组氢气中水蒸气含量对于设备的安全稳定运行至关重要。此外,在制药[5]、半导体[6]、电子元器件[7]、高压开关分解产物检测[8]等行业,微量水蒸气会严重影响产品的质量和产量,因此,快速、准确测定微水含量,对提高产品质量和产量具有重要意义。
当前,对低浓度水蒸气进行检测的主要方式有阻容法[9]、露点法[10]等方式。阻容法体积小便于携带,检出限较低,但其响应速度较慢(一般需要3~5 min),精度较差,老化和偏移也较严重;露点法操作简单,仪器比较稳定,是目前准确度较高的方法,但其对污染物较为敏感,稳定时间长(低湿范围大概需要1 h),价格也较高。以上传统方法均不适用于现场恶劣环境条件下对水蒸气的快速、准确检测应用。而可调谐二极管激光吸收光谱技术(Tunable Diode Laser Absorption Spectroscopy,TDLAS)作为光学检测技术中的新技术,因其高精度,高测量速度,高可靠性的特点,是实现微水含量检测的最有潜力技术之一。本文即设计并实现了一种能够适用于现场的高灵敏度、快速、小型微水含量检测光学传感器。
2 检测原理
利用TDLAS技术实现对水蒸气的检测,并采用波长调制技术(WMS)结合相敏检波技术来降低测量系统中的噪声和干扰,实现对微弱信号的提取。此时,可得二次谐波(2f)信号可表示为:
S2f(v)=βI0H2(v,a)PtolcrelNtotL
(1)
式中,β为量纲一的比例常数,取决于传感器的传递函数;H2为线型函数的二次谐波系数;v为激光频率;a为调制幅度;Ptol为气体总压强;crel为被测气体比浓度;Ntot为气体总分子数密度;L为气体吸收路径长度[10]。
经光强校准后,2f信号可不受激光功率波动的影响,此时二次谐波信号可表示为:
S2f,cor(v)=βcorH2(v,a)PtolcrelNtotL
(2)
3 传感器设计
3.1 谱线选择
H2O在红外区域有着丰富密集的吸收谱线,在进行光谱探测时需要选择无邻近谱线和其他气体吸收谱干扰的谱线,并且为达到较高的探测灵敏度,要求尽可能选择吸收较强的谱线。依据文献[11]的方法,对Hitran谱库中的H2O以及可能的共存干扰物CO、CO2、HF、H2S、SO2和O2等气体在v2+v3谱带内的吸收谱线数据进行仿真,结果如图1所示。图1中H2O的体积比浓度设置为100 ppm,其他气体浓度均设置为1000 ppm,所有气体的光程设置为20 cm,气压为1 atm。从图中可看出,H2O在1367~1369.5 nm范围内存在着若干条明显且独立的吸收谱线,而在此波段范围内无其他气体吸收谱的干扰,其中尤以1368.6 nm附近处的吸收线为最强,如图1虚线内所示,因此,结合近红外区域可选激光光源的性能、价格等因素,本设计将选择该谱线作为被测谱线。
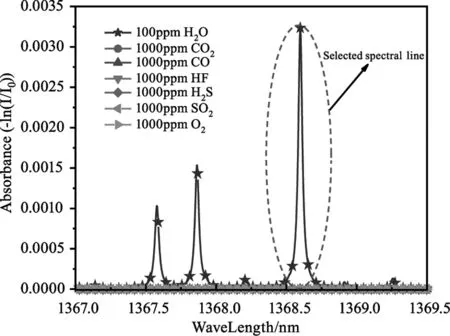
图1 由Hitran谱库仿真所得H2O、 CO、CO2、HF、H2S、SO2及O2等气体v2+v3谱带内的吸收谱Fig.1 Absorption spectra inv2+v3 bands of H2O,CO,CO2,HF,H2S,SO2 and O2 obtained by simulation from Hitran
3.2 结构设计
由于H2O为极性分子,偶极矩较大,在氢键的作用下,具有较强的吸附性[12],且大气环境中广泛存在着大量水汽,使得现场对微水含量的检测非常困难。本研究为克服微水检测速度慢、准确度低问题,设计了紧凑型的激光光谱检测传感器,其结构如图2(a)所示。传感器采用单次直通式光路结构,反应气室为内径4 mm的不锈钢管,从而尽可能的减小体积和气体与池壁的接触面积,降低了吸附与吹扫时间。底座、端部结构件和气体进出口接头均采用不锈钢材质,电路板嵌入气室与底座之间,使得整体结构紧凑而稳固。气室上部装配有3D打印PA12壳体,起保护作用。所用光源为输出中心波长在1368 nm附近的近红外半导体激光器(NanoPlus NP-DFB-1368-TO5),输出平均功率8 mW。光电探测器为InGaAs PIN光电二极管(滨松G12180-010 A)。气室内植入了微型气压及温度传感器对被测气体进行实时温度和压力的检测与校准。
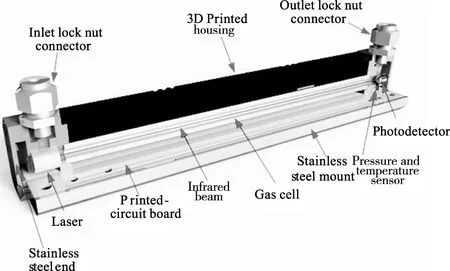
图2 微水传感器结构及尺寸图Fig.2 Structure and dimension drawing of micro water sensor
3.3 电路模块设计
传感器电路部分采用嵌入式CPU芯片(STM32F407)为控制与信号处理核心,外围电路由激光器电流控制模块、温度控制模块、前置放大单元、滤波电路等组成。电流调制模块实现对激光器的低频波长扫描和高频波长调制,以实现谐波检测,温度控制模块对激光器管芯温度进行高精度控制,以实现输出波长的稳定性。探测电路包括前置放大单元和滤波电路,将光电转换后携带有光谱信息的电信号进行电流电压转换及滤波放大。温度和压力传感器输出数字信号,直接被CPU读取后作进一步处理。相敏检测在CPU内由软件部分实现,微水含量检测结果通过ModBus协议经RS485总线输出。
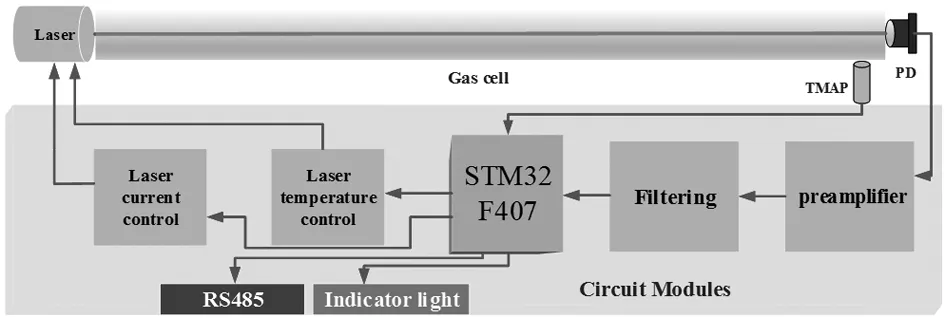
图3 微水传感器电路设计示意图Fig.3 Schematic diagram of micro water sensor circuit design
4 性能评价实验系统
由于H2O分子特殊的物理和化学特性,很难制成商品化的标准气体,尤其是在低湿范围,标准湿度的产生非常困难,因此为验证传感器性能,搭建了如图4所示的校准测试实验平台。实验平台首先将空气通入两级干燥筒进行充分干燥,而后经减压稳压后通入两位三通阀,该两位三通阀将干燥空气分别通入一路干气质量流量计和两路湿气质量流量计,并将多余的干气排空。其中一路湿气质量流量计为最大流量为50 sccm的高精度质量流量计,用于配制低湿气体,以提高配制精度,另外一路最大流量为3 L,用于配制高湿气体。经湿气质量流量计后的湿气气路通入一个恒温水槽用于产生饱和湿气,在湿气室缓冲平衡后与干气气路混合,生成一定水汽浓度的标准湿度气体,分三路并联分别输出至标准仪器(镜面露点仪)、被校准测试传感器和排空。该湿度校准测试实验平台以当前国际公认的对湿度具有较高检测精度的瑞士MBW373LX镜面露点仪(以下统称为标准表)为标准,对湿度发生装置产生的各个水平湿度值与本研究传感器一起进行并联同步检测,结果作为校准值对传感器进行校准。

图4 微水湿度传感器校准测试平台Fig.4 Calibration and test platform for micro moisture sensor
5 结果及性能分析
5.1 谐波信号分析
由湿度发生装置配制出各个湿度下的气体,而后被所设计光学传感器和标准表以并联方式同时进行检测,得到各个浓度梯度下传感器输出的二次谐波信号,以及由标准表给出的浓度校准值。图5为校准湿度为826 ppm时的传感器输出二次谐波信号及滤波分析图,其中横坐标为采样点,纵坐标为传感器输出信号幅度(与采集光电信号成正比的内码值)。图5中,灰色曲线为滤波前传感器输出二次谐波信号,可以看出,在整个谱线范围内均存在一定幅度的噪声干扰。采用加权多项式拟合平滑数字滤波算法,即Savitzky-Golay滤波(SG滤波),可以很好的将噪声滤除,图中黑色曲线为进行25点SG滤波后二次谐波信号。因此,在后续测试及应用中,传感器都将采用该滤波算法将采集二次谐波信号进行滤波后再做进一步处理和分析。
图6所示为光学传感器测量所得,经滤波处理后的各个湿度下的二次谐波信号,从图中可看出,传感器从低湿(数十ppm)到较高湿度(>5000 ppm)均能输出具有一定信噪比的二次谐波信号。
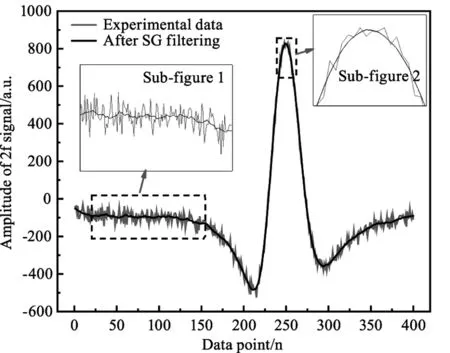
(灰色曲线为滤波前传感器输出二次谐波信号,黑色曲线为进行25点SG滤波后二次谐波信号;子图1为无吸收位置处滤波前后信号放大图;子图2为吸收线峰值位置处滤波前后信号放大图)
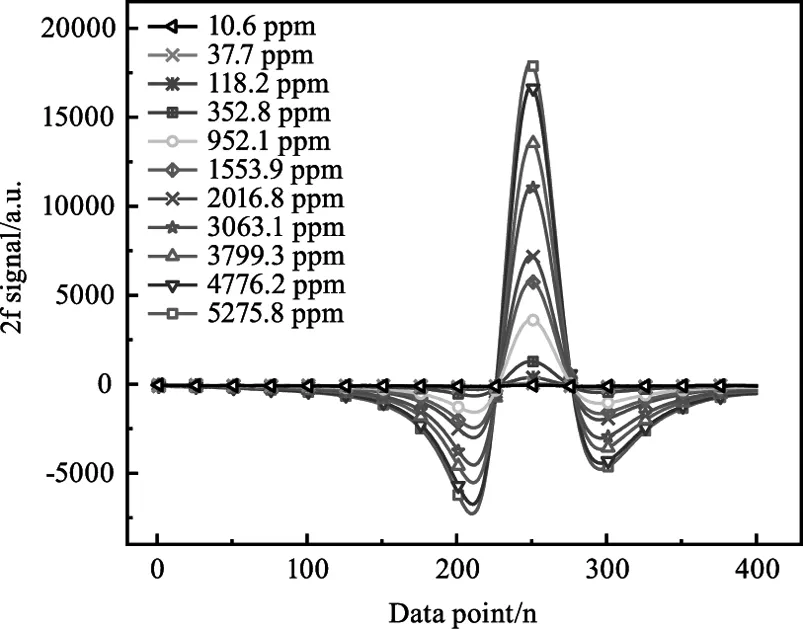
图6 湿度梯度下的传感器输出二次谐波信号Fig.6 Second output second harmonic signal under humidity gradient
5.2 线性及测量范围
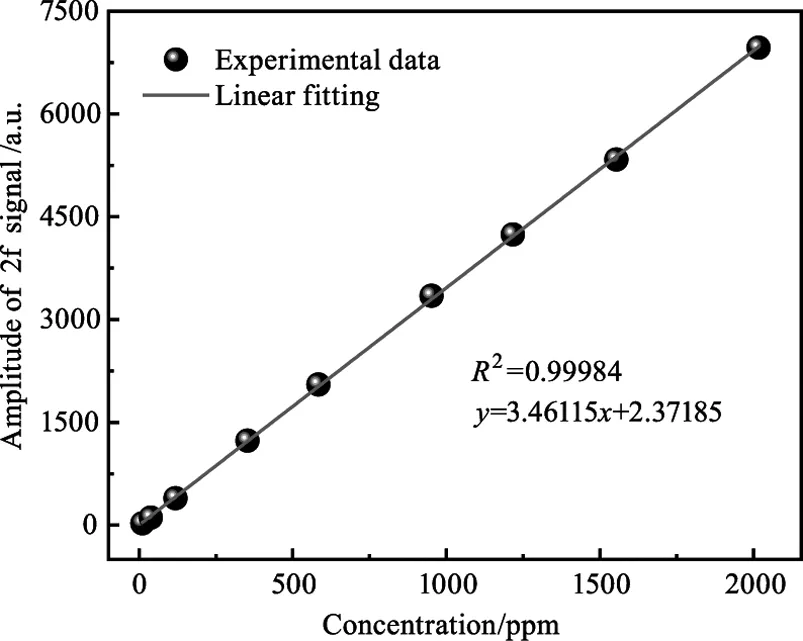
校准后,传感器输出二次谐波信号幅值(峰-峰值)与对应浓度关系如图7和图8所示。图7所示为水蒸气浓度从~10 ppm到~2000 ppm范围变化,即图6中前九组浓度数据时,实验所得二次谐波信号幅值与线性拟合结果,在该浓度梯度范围内,拟合的R2值达0.99984,可见,谐波幅值与水蒸气浓度之间呈良好的线性关系。
图8中黑色圆球为实验所得所有浓度下二次谐波信号幅值与对应浓度,直线由虚线框内数据拟合得到,即仍为图7中数据拟合直线。在虚线框外,随着湿度的增大,传感器输出的二次谐波幅值与对应浓度之间的非线性也越来越大,这是由于该波长位置水蒸气的吸收线强较强(1.8×10-20cm-1/(molecule·cm-2)),根据式(1),光强变化也随浓度增加呈现非线性。
因此,为提高传感器的准确度及缩小测量时间,设定传感器的测量范围为具有良好线性的0~2000 ppm范围。
(拟合浓度分别为:10.6ppm、37.7ppm、118.2ppm、352.8ppm、583.5ppm、952.0ppm、1216.9ppm、1553.9ppm、2016.8ppm)
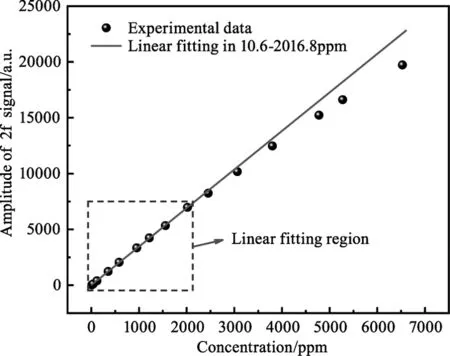
图8 传感器输出二次谐波信号幅值与对应浓度关系曲线Fig.8 The relationship curve between the amplitude of the sensor′s 2f signal and the corresponding concentration
5.3 测量准确性分析
为评价所设计传感器对水蒸气浓度测量的准确性,在实验平台上分别配制出若干浓度梯度的水蒸气,由标准表和光学传感器同时进行测量,标准表测得浓度分别为14.82 ppm,60.21 ppm,182.17 ppm,441.06 ppm,1057.8 ppm,1553.94 ppm和1936.83 ppm,作为标准浓度,与传感器测量结果进行对比作图,如图9上方图所示。图9下方图为对应浓度位置处传感器测量浓度与标准浓度的相对误差,可看出误差范围在-5.53 %~1.84 %之间,且除较低浓度外,在大部分浓度位置处相对误差均较小,说明所设计传感器在测量范围内具有较好的测量准确性。
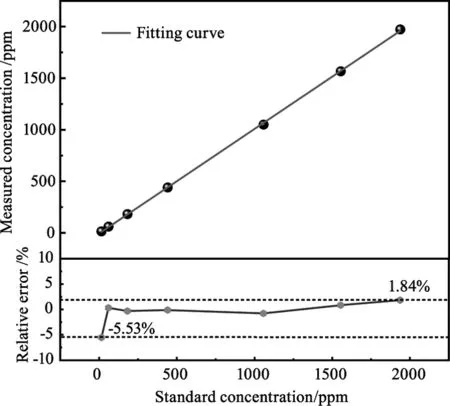
(上图:传感器实际测量数据与标准浓度的拟合曲线;下图:传感器测量浓度与标准浓度相对误差)
5.4 最小检出限
根据国际纯粹与应用化学联合会(IUPAC)推荐的以3倍信噪比为检测极限来确定本系统的检出限。图10(a)所示为传感器测量所得37.7 ppm水蒸气的二次谐波信号,其中灰色曲线为滤波前原始数据,黑色曲线为采用SG滤波后曲线。如图10(a)所示二次谐波信号的幅值为218.5,噪声为19.2 dB,信噪比为11.4 dB,计算可得该系统对微量水蒸气的检出限为10 ppm。
为验证最小检出限指标,实验配制了较低浓度的水蒸气,传感器测量得到浓度值为10.5 ppm,如图10(b)所示即为传感器采集得到的二次谐波数据,滤波前的原始数据信号幅度已接近于噪声幅度,进行SG滤波后提高了信噪比,且信噪比接近并大于3,与理论计算结果相吻合。

图10 水蒸气浓度为37.7 ppm及10.5 ppm时的二次谐波信号Fig.10 2f signal when the water vapor concentration is 37.7 ppm and 10.5 ppm
5.5 响应时间
传感器的响应时间用处于测量范围内的高、中、低三个典型浓度进行测试,实验时,先用干气将传感器的气室吹干,传感器测量并记录数据,连续测量约4 min后,迅速切换至高浓度水蒸气,同样连续测量约4 min后,再切换至干气,重复上述测量过程并分别对中浓度和低浓度水蒸气进行测试。测试结果如图11所示。传感器测量得到高、中、低浓度分别为1910 ppm、1055 ppm和145 ppm。根据测量结果,得到传感器对高浓度水蒸气测量的上升时间为5 s,下降时间为7 s,对中浓度水蒸气测量的上升时间为5 s,下降时间为6 s,对低浓度水蒸气测量的上升时间为5 s,下降时间为5 s。因此,所设计传感器具有良好的时间响应特性。
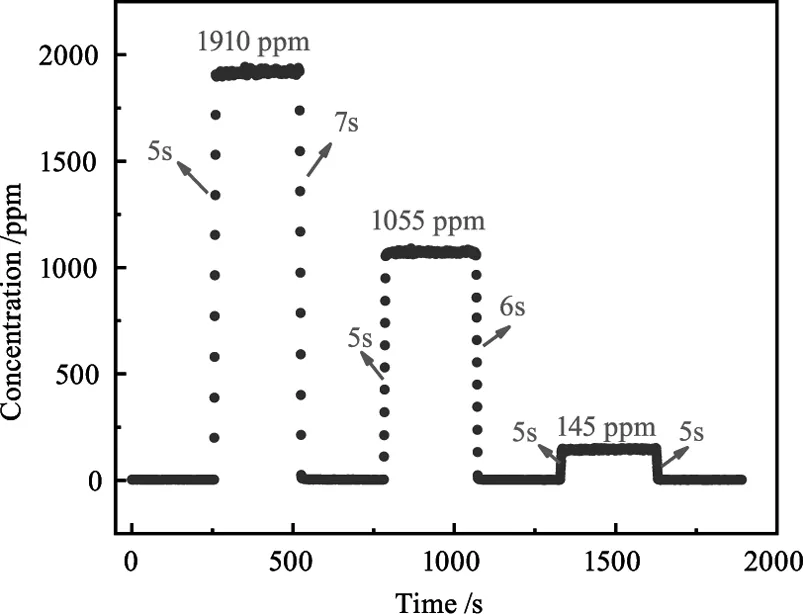
图11 传感器在不同浓度变化时的响应时间Fig.11 Response time of the sensor at different concentration
6 结 论
本文设计了一种基于可调谐激光吸收光谱技术的微量水蒸气浓度检测传感器,并详细讨论了传感器的设计思路、结构及性能分析。传感器结构紧凑,外形尺寸3 cm×3 cm×20 cm,内置有红外激光器、气体池、探测器、温压传感器、电路板等模块。通过与高精度镜面露点仪测试结果的对比与校准测试,得到了传感器对水蒸气体积比浓度的测量范围达0~2000 ppm,与标准表相比较的相对测量误差在-5.53 %~1.84 %之间,系统最小检出限达10 ppm,响应时间小于7 s。该传感器性能指标满足在高压开关、氢冷发电机、化工、制药等多个行业对微湿度检测的要求,相比于传统湿度检测方法,具有测量准确度高、速度快、结构紧凑等优点,可为行业发展提供重要技术手段。
