机器人关节空间轨迹规划研究进展
2022-11-11邓朝晖葛吉民李重阳
李 尉,邓朝晖,葛吉民,刘 伟,李重阳
(1.湖南科技大学难加工材料高效精密加工湖南省重点实验室,湖南 湘潭 411201) (2.湖南科技大学机电工程学院,湖南 湘潭 411201)
智能制造技术的快速发展,使得越来越多的机器人被应用到工业生产中。起初机器人主要在汽车自动化生产线上使用,如今在众多领域都可以看见它们的身影[1-4],而且机器人等自动化设备的大量应用也代表着国家的自动化水平在不断提高[5],工业机器人的研究也在朝着高精度、轻型化和智能化等方向快速发展[6]。
机器人轨迹规划是指综合考虑机器人的性能和工作环境后,在其工作空间内规划出末端执行器从起点运动到终点的轨迹。按工作空间不同,可分为笛卡儿空间轨迹规划和关节空间轨迹规划。实际应用过程中,多在关节空间进行轨迹规划,以此避免奇异性问题[7]。一条性能优良的轨迹,可以提高运行效率,减小运动过程中的冲击,降低能耗,提高工件的加工质量。除了机器人本身的运动性能对加工质量的影响外,运行轨迹的合理性在很大程度上也影响着工件的加工质量。机器人加工过程中的运动参数(如速度、加速度等)发生突变,会产生机械冲击,严重情况下会导致运动系统发生振荡,影响机器人的轨迹跟踪精度,从而导致工件加工质量不合格,甚至会损坏工件[8]。
目前,一般将关节空间的轨迹规划分为两种:一种是基本轨迹规划,另一种是最优轨迹规划。基本轨迹规划研究的是插值算法。最优轨迹规划研究的是如何设置合理的优化目标和如何利用算法将优化目标转化为约束条件,再运用合适的插值方法对轨迹进行规划。机器人轨迹规划技术的研究,对提高我国的高端制造水平,实现全面智能制造具有十分重要的意义[9]。为此,本文对机器人关节空间的基本轨迹规划和最优轨迹规划进行了综述,系统地分析了这两种轨迹规划方法的特点、优势与不足,并指出了未来轨迹规划技术的发展趋势。
1 基本轨迹规划
在关节空间中进行轨迹规划,就是要将机器人运动过程中的关节角度、角速度和角加速度等用关于时间的函数表示出来,通过控制各个关节的力和力矩[10],从而达到控制各个关节的角速度和角加速度的目的。目前,一般都是先使用示教或者离线编程[11]的方式,得到各个关节的始末位置,然后通过插值算法规划运动轨迹。基本轨迹规划方法分类如图1所示。

图1 基本轨迹规划方法分类
1.1 多项式插值的轨迹规划
多项式插值的轨迹规划是在点对点运动的基础上,通过多项式对这些关键点进行曲线拟合,形成一条平滑的曲线。
Kim和Lin等[12-13]用3次多项式对经过空间中多个关键点的轨迹进行规划,当经过的关键点数目较多时,计算量十分巨大,且无法保证加速度曲线连续。为了解决这个问题,Boryga等[14]先后利用5次、7次和9次多项式对运动轨迹进行拟合,并通过增加中间节点和利用设定的最大加速度值求解多项式,降低了求解系数的难度,但求解过程仍较复杂。李小为等[15]采用3-5-3多项式混合插值,得到平滑优越的运动轨迹,但在其起始点和终止点处,加速度仍存在突变。陈伟华等[16]用5次多项式对曲线拐角处进行光滑过渡,得到了一条运动性能较好的轨迹,其位移、速度和加速度曲线平滑。
由此可知:3次多项式插值一般应用于运动始末位置关节角度和角速度已知,且对轨迹精度要求不高的场合。5次多项式插值对角加速度增加了约束,适用于对冲击有一定约束要求的场合。而7次及以上多项式能提高拟合精度,但是计算复杂且轨迹局部不可控,难以广泛应用。多项式组合插值能减小计算量,但连接处曲线过渡不够平滑,仍存在冲击。
1.2 样条曲线插值的轨迹规划
样条曲线具有导数连续性、局部支撑性和几何不变性等[17]优良特性,经常用于连接多段轨迹的过渡区域,能提高整条曲线的平滑性[18]。根据控制点的间隔分布的不同,一般将B样条曲线分为均匀和非均匀B样条(non-uniform rational B-splines,NURBS)曲线。
B样条曲线不经过轨迹控制顶点,而对机器人运动轨迹进行规划时,一般希望轨迹尽可能多地通过给定的控制顶点(型值点)[19],这就需要对控制顶点进行处理。常用的处理方法有两种:1)利用经过的节点反求出控制顶点[20],再利用反求得到的控制顶点去构造生成B样条曲线(如图2[21]所示);2)利用几何关系,通过增加控制顶点的数目,使B样条曲线顺利经过需要的节点(如图3[22]所示)。
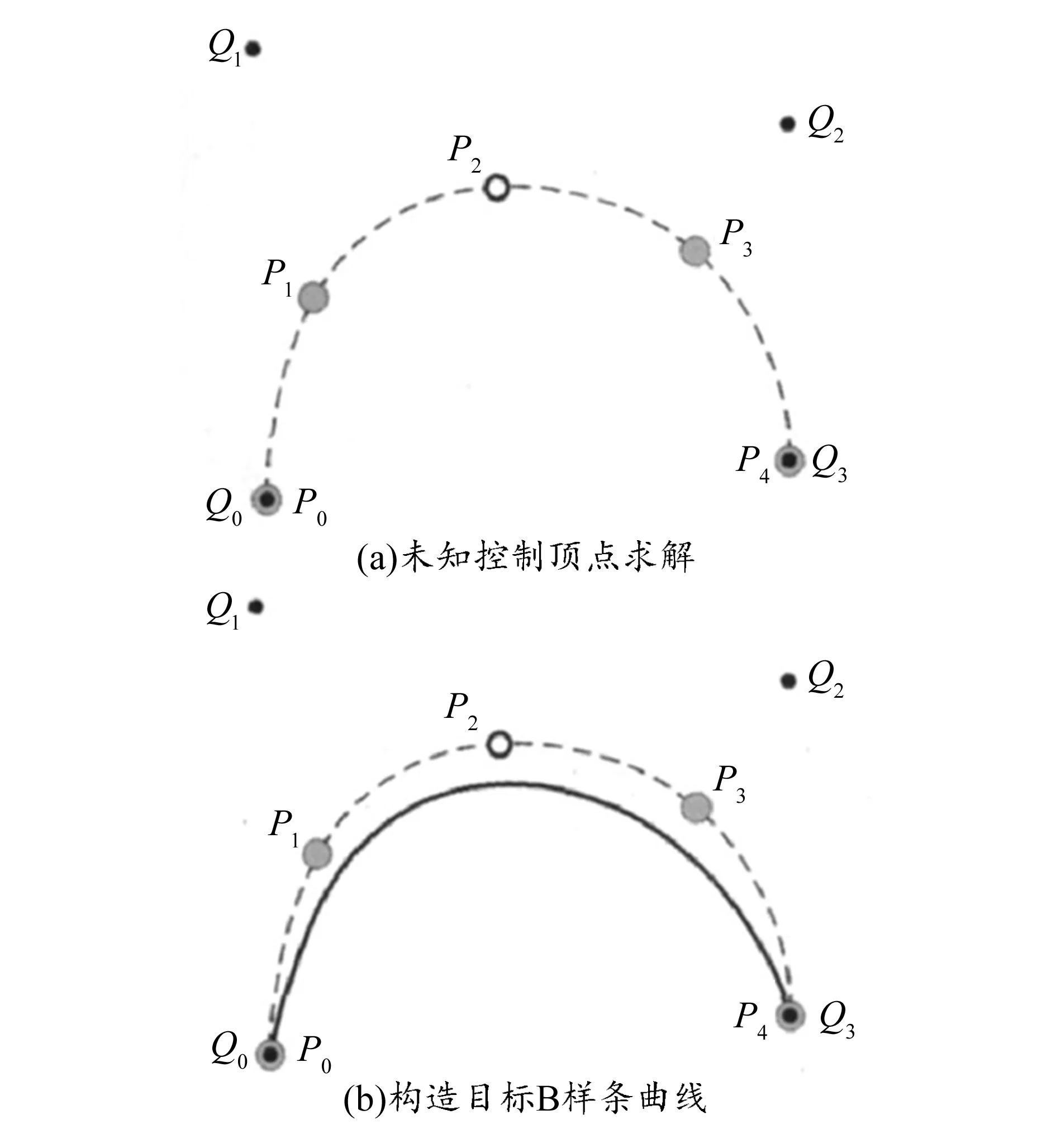
图2 未知控制顶点求解并构造目标曲线

图3 B样条函数的虚节点
Meike等[21]在关节空间中利用B样条曲线对点到点的运动轨迹进行拟合,在轨迹连接处使用3次B样条曲线进行平滑处理,得到的轨迹满足设定的边界条件。Wang等[22]利用虚拟节点控制拟合轨迹,使得轨迹顺利经过每一个中间节点。在此基础上,Gasparetto等[23]对3次和5次B样条曲线的插值效果进行对比分析,发现3次曲线插值能得到平滑的速度曲线,而5次曲线插值可得到平滑的加速度曲线。秦锋等[24]提出在轨迹的起点处和终点处的小段距离使用3次样条曲线来拟合、中间部分用5次样条曲线来拟合的新方法,适用于对轨迹中间点速度和加速度有特别要求的情况。朱世强等[25]采用7次B样条曲线,对机器人关节位置序列进行插值,确保了起点和终点的速度、加速度和脉动曲线的平滑。随着使用的B样条曲线次数的增高,曲线求解过程会变得越来越复杂,甚至会出现失真现象[26-27]。
使用均匀B样条曲线进行轨迹规划,起止点的导数值存在突变,会造成机器人启停时发生振动[28]。Saravanan等[29]使用NURBS曲线,不仅消除了振动,还提高了轨迹的精度和稳定性。王昕等[30]提出了一种NURBS曲线插补算法,该算法能够根据设计的最大轮廓误差、加速度和加加速度自适应地调整插补速度,从而确保速度曲线平滑。乐英等[31]在最短路径的要求下,分别采用3次多项式、3次B样条和3次NURBS曲线对轨迹进行规划,结果表明3次NURBS曲线规划出来的轨迹性能较好。胡嘉阳等[32]采用5次NURBS曲线使轨迹更加平滑。样条曲线的“次数”越高,它所能满足的约束条件也越多,但并非次数越高越好。高阶NURBS曲线结构复杂,求解速度慢,而且目前对高阶NURBS曲线的轨迹规划的研究也较少。
综合来看,多项式插值及样条曲线插值的特点及应用场合见表1[33-37]。

表1 关节空间曲线插值算法比较
基本轨迹规划侧重于运动轨迹的连续性和平滑性,但在实际作业中,效率、能量和冲击等问题是不可忽视的,因此需要对这些方面进行深入研究,进一步优化轨迹,从而提高运动轨迹的性能。
2 最优轨迹规划
实际作业任务的限制和追求更大的效益,势必会促使轨迹规划技术往提高机器人的运行效率、减少轨迹运行过程中的能量消耗和降低关节冲击等方向发展,这就使研究者开始研究如何优化机器人的运行轨迹。一般将轨迹优化称为最优轨迹规划,如今研究者主要从时间、能耗和冲击这3个方面展开研究,具体分类如图4所示。

图4 最优轨迹规划分类
2.1 单目标最优的轨迹规划
2.1.1时间最优的轨迹规划
将机器人引入工业生产,不仅是为了提高产品质量,也是为了提高生产率,机器人可以不间断地工作,减少空闲或浪费时间[38]。在保证加工质量的前提下,如何使机器人以最短时间到达指定位置完成工作任务,是减少运行时间的关键。
目前,实现时间最优的轨迹规划的方法主要分为3种:1)通过优化算法寻找出时间最优的轨迹[39];2)根据运动学和动力学的约束[40],分别求解出机器人运行过程中各关节允许的速度和加速度的最大值[41],通过提高运行过程中的速度来减少运行时间[42-44];3)将时间目标转换为其他更易计算的目标[45-46],减少轨迹运行时间。
Fares等[47]利用遗传算法获得了时间最短的轨迹。Bobrow和Shin等[48-49]基于动力学方程,提出新的轨迹规划优化算法,但计算量大,难以获得机器人的动力学参数的准确值,不适用于实际工作中。在运动学和动力学的约束下,Lin和Elias等[13,50]通过3次多项式对关节空间的关键点进行轨迹规划,优化了机器人的运行时间。但是,如果关键点分布偏差较大,机器人则难以实现高速运动。南文虎等[10]利用修型/射靶算法去矫正多重约束下的最大速度曲线,并通过提高轨迹运行速度,来减少运行时间。Lee等[45]通过将时间优化转变为对点对点的优化,采用启发式算法加快搜索速度,并利用时间尺度法处理制动器力矩约束,找到了时间最优轨迹。Debrouwere等[46]将时间最优轨迹规划问题转换为凸优化问题,既简化了计算也优化了轨迹运行时间。肖仁等[51]使用量子粒子群优化 (quantum particle swam optimization,QPSO) 算法去优化轨迹运行时间,解决了多项式插值由于阶次高难以快速求解和优化的问题。居鹤华等[52]提出了基于遗传算法(genetic algorithm,GA)的3-5-3多项式轨迹规划方法,与粒子群优化(particle swarm optimization,PSO)算法相比,机器人运动时间更短,运行更平稳。陈晗等[53]先用5-7-5多项式插值对轨迹进行拟合,然后在拟合得到的轨迹的基础上,通过复合形法对轨迹进行优化,减少了轨迹运行时间,满足了设定的要求。在前者的基础上,丁阳等[54]利用QPSO算法进行时间寻优,与PSO算法和差分进化算法(differential evolution algorithm,DE)的优化效果相比,该方法得到的轨迹在运行过程中花费的时间更短。
目前,大部分的研究都是在运动学和动力学的约束下,去研究如何提高算法的收敛速度和该优化结果是否为全局最优。现在使用较多的GA、PSO、DE和QPSO等算法都有其适用条件,需要根据具体场合选用合适的优化算法。
2.1.2能量最优的轨迹规划
工业机器人的能耗约占工件生产过程中消耗总电能的8%[55],如何降低机器人的能耗、提高能源效率,是智能制造未来发展过程中必定要解决的问题。目前,对降低机器人能耗的研究主要在往能耗函数的确立和优化能耗算法的应用这两个方向发展。
在能耗函数的确立方面,主要是使用转矩平方的积分[56]、能量成本函数[57]、能耗代价函数[58]和各关节动能之和[59-60]等代表机器人的能耗,这些表示函数及优缺点见表2。
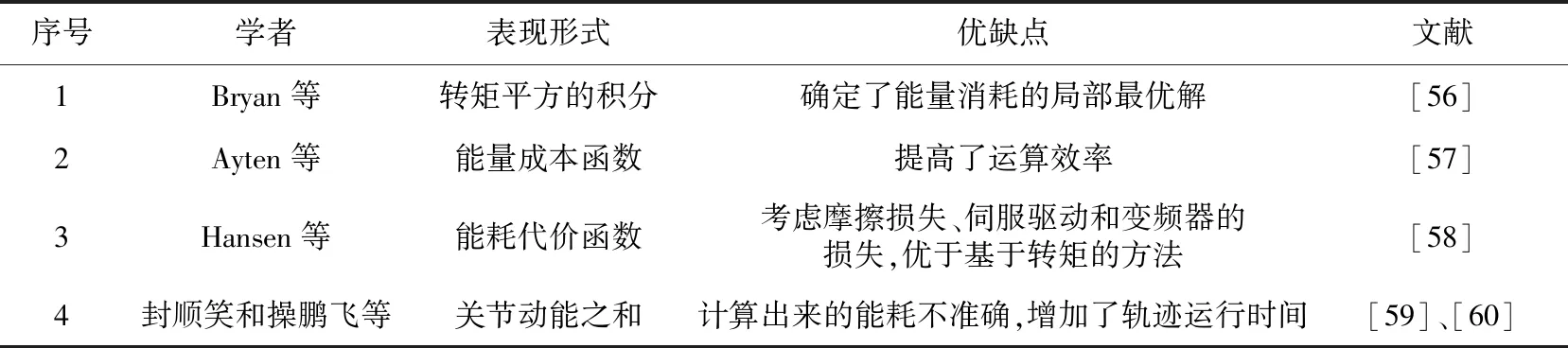
表2 能耗表现形式及特点
有些学者使用优化算法,实现机器人运行轨迹的能量优化。封顺笑[59]以动能作为能耗函数,将遗传算法和粒子群算法结合起来使用,虽然可以减少整条轨迹运行过程中的能耗,但是增加了运行时间。为了减少轨迹运行时间,王成[61]将已经规划好的轨迹作为约束条件,把相邻节点间的运行时间作为优化变量,利用改进遗传算法对节点间的运动时间进行求解,降低了机器人的能量消耗,提高了加工效率。彭建文[62]分别以力矩、电机所做机械功、电机消耗的总能量来表示能耗函数,再将关节轨迹参数化[63],将能耗优化问题转变为控制点的选择问题。如此做的优点是只需求解出一组最优控制点,就能通过构造曲线得到需要的机器人能耗最优的运行轨迹。白云飞等[64]提出一种利用神经网络建立机械臂能耗模型的方法,根据所建立的能耗模型,结合机器人关节空间轨迹构造了能耗目标函数,最后采用自适应PSO算法得到了能量最优的轨迹参数,实现了优化能耗的目的。Field等[65]提出一种迭代动态规划方法,虽然无法求得全局的最优解,但对求解的函数类型没有限制,能够简易地求解复杂能耗函数,且能够实现并行计算,当硬件的计算力足够时,计算所需时间更短。Perez等[66]将机器人各关节电机消耗的机械能作为总能耗,利用遗传算法收敛性、实时性较好的特点求解能耗优化函数。Devendra等[67]分别采用GA和模拟退火(simulated annealing,SA)算法对机器人轨迹运行中消耗的能量进行求解,其中SA算法的求解速度更快。
求解迅速且准确的算法能够快速地得到高精度、平滑性较好的轨迹,因此寻找一种计算过程简单、求解准确的算法显得尤为重要。能量最优的轨迹规划,不仅可以减少运行过程的能量消耗,而且可以产生平滑轨迹,降低制动器和机械手结构的应力,但衡量应力的指标是机器人运动过程中的冲击,因而研究者对冲击最优的轨迹规划展开了相关的研究。
2.1.3冲击最优的轨迹规划
关节冲击对机器人运行轨迹的平稳性影响很大,而平稳性是衡量高端机器人工作性能的重要指标之一[68]。将关节冲击保持在较小的范围,对提高机器人的运动性能至关重要[69],这就需要对轨迹冲击产生的原因及如何对冲击进行优化进行深入研究。目前国内外对轨迹冲击的研究分为冲击评价指标设定和优化冲击算法应用这两个方向。
当运动过程中角加速度发生突变时,就会产生关节冲击。通过研究,学者们认为关节冲击与关节角加速度对时间的导数(即关节角加加速度)有关[70]。后来逐渐将冲击评价指标分为表3中的3种形式。

表3 冲击评价指标的表现形式及其特点
在关节冲击优化算法应用方面,孙志毅等[74]使用DE算法,降低了多项式组合插值过程中的冲击,同时也节省了工作时间。郭明明等[75]使用改进差分进化算法对多项式组合插值进行优化,减小了关节冲击。Dan将[76]神经网络应用于冲击优化问题,对优化函数进行理论推导,用关节角优化代替冲击优化,得到了角加速度连续的曲线,关节冲击明显减小。Lin[77]使用K-均值聚类的PSO算法,将冲击优化问题转化为时间优化问题,在总时间一定的约束下,通过减小加加速度,从而减小运动过程中的冲击。该方法不仅可以用于解决不同目标函数下的优化问题,而且因其能同时对大量节点进行处理,所以计算效率较高。唯一的不足之处就是依赖于操作者的经验,人为地设置算法的参数,同时由于设定的参数对结果影响较大,因此需要科学地确定参数,降低主观因素对优化结果的影响。
要避免冲击,就是要使角加速度连续,即对机器人的角加加速度进行限制,但限制角加加速度,就会影响机器人的工作效率,如何减小这种影响,对研究者提出了新的挑战。目前的实际研究中,多将时间与冲击这两个指标一起进行优化,提高机器人轨迹的性能。
2.2 多目标综合最优的轨迹规划
目前,多目标优化问题的处理方法一般分为两种:1)将最重要的一个目标作为优化目标,然后把其他目标作为约束条件,将其限制在许可范围内[78];2)根据各个目标的重要程度不同,给其设定不同的权重系数[79],将综合优化问题简化成单目标优化问题[80-81]。方法2)减小了计算复杂程度,所以大多学者倾向于使用它对多目标优化问题进行求解。
2.2.1时间-能量最优的轨迹规划
早在1992年,Shiller[82]就开始了机器人轨迹运行时间和能耗方面的优化研究,他建立了一个时间-能量代价函数,通过公式推导,给出了时间-能量最优的必要条件,从而将时间-能量优化问题转变为一个四阶两点边值问题。只需将其中一个边界条件代入,利用计算机迭代求解,就能得到需要的结果。唐建业等[83]通过确定下来的工作空间轨迹位置序列,经过逆运动学计算出关键点在关节空间中的位置序列,再利用分段多项式去构造机器人关节空间的运动轨迹。在减少运行时间的同时,尽可能地降低平均速度,不仅优化了时间,也减少了机器人的能耗。Balkan[84]通过动态规划方法,提高轨迹运行过程中的最大速度,减少了轨迹运行时间,通过实验,证实了可以利用惯性来节省机器人运行过程消耗的能量。徐海黎等[85]使用加权系数法定义代价函数,同时考虑多种运动学约束,利用罚函数对机器人运动学约束进行排序,并使用基因环境双演化免疫克隆算法对罚函数进行优化,提高了算法求解速度和优化的效果。
2.2.2时间-冲击最优的轨迹规划
在加工过程中,除了要求高加工效率外,对稳定性也有较高的要求。工业机器人运行过程中产生的冲击,影响着机器人的稳定性,因而对运行时间和冲击进行综合优化是很有必要的[86]。
Gasparetto等[87]根据具体工况,通过调整权系数的方式,改变了运行时间和冲击在优化中的重要程度,而且在设置约束时无需知道执行任务的总时间,该综合优化函数应用场合基本上不受限制。在此基础上,Lanzutti[88]通过改变权重系数值证明权重系数对优化效果会产生影响,从得到的加加速度对比曲线,可以直观看出冲击减小。国内学者Huang等[89]利用精英非支配排序遗传算法(elitist nondominated sorting genetic algorithm,NSGA-Ⅱ)对机器人的运动时间和关节冲击一起进行优化。该算法求解直接,但收敛性、时效性不是很好。陆佳皓等[90]通过优化运行时间和冲击这两个相互耦合且矛盾的目标,用约束顶点的方式来代替机械臂的运动约束,用5次NURBS曲线去拟合运动轨迹,再使用NSGA-Ⅱ对时间-冲击函数进行优化,不仅提高了机器人的运行效率,而且减小了机器人运动过程中的冲击,优化效果较好。
2.2.3时间-能量-冲击最优的轨迹规划
时间-能量-冲击最优的轨迹规划,是目前较好的轨迹规划方案,也是较难实现的规划方案。使用该方案时,要同时考虑机器人的运动学、动力学和结构特性,在不同的应用场合、不同的加工要求下,设置不同的目标权重,从而使规划得到的轨迹能够适应实际工作需求。
Saravanan等[91]提出了一个多准则代价函数,该函数以时间、能量、冲击为优化目标,加速度和可操作性作为评价指标,先采用B样条曲线进行轨迹拟合,再分别利用NSGA-Ⅱ和DE算法对代价函数进行求解。使用DE算法收敛速度更快、计算时间更短,但由于该加权系数是人为设定的,且系数对优化结果的影响较大,导致该方法应用场合受限。杨云等[92]以六自由度吊机运动过程中的时间、能量、冲击等为优化目标,使用改进带精英策略的遗传算法(SUMTNSGA-Ⅱ)去求解多目标优化函数,能有效确保解集的多样性和求解效率。王磊[93]用惩罚函数,将有约束优化转变成无约束优化,提高了算法的效率。徐智浩等[94]对时间、能量、冲击这3个目标进行优化,先求出优化函数的一组最优解集,再通过模糊判断从前面求出的最优解集中挑选一个需要的解。
多目标综合优化是一种理想的轨迹规划方式,但是目前各目标之间的具体联系尚未明确,相关权重系数也是根据经验设置,未给出科学的计算公式,还较难应用于实际加工。
3 结束语
机器人关节空间的基本轨迹规划方法已有较为成熟的应用,但还存在轨迹拟合精度不高、段与段连接处过渡不圆滑等问题,可采用B样条、NURBS等拟合能力更强的曲线拟合轨迹,此外曲线的参数化也简化了轨迹的求解过程,提高了求解速度。
单目标最优的轨迹规划主要侧重于对时间、能耗的优化,多目标综合优化中附加权系数法使用最为广泛,但权重系数的确定有很大的主观性,针对不同工作环境和加工要求的动态确定权重系数方案尚未得到解决。
目前,轨迹规划方法大多是算法层面的研究,部分算法通用性差,对新型传感器的应用较少。未来可以从如下几个方面对机器人轨迹规划展开深入研究:
1)分段组合插值的轨迹规划。
分段组合插值拟合精度较高、拟合速度快。分成若干小段后,每段的关键点较少,可以减少计算量。多项式组合插值、样条曲线组合插值都应用得较为广泛,但多项式与样条曲线组合插值的研究却较少。如何提高段与段连接处的平滑性,如何去平衡轨迹平滑性与计算复杂度,将分段组合插值变得如点对点的轨迹规划一样简单易实现是今后将要解决的一个问题。
2)不同工况的多目标轨迹规划。
目前,多目标优化大多是针对特定工况的多目标优化,今后应该扩大多目标函数的应用范围,设计出可以针对不同工况和加工要求,自适应调整各个目标权重的多目标算法。综合考虑各个优化目标之间的联系,确定符合实际的优化目标和更科学的权重系数,研究如何提高优化算法求解速度和准确性也是今后需要解决的一个难题。
3)多传感器信息融合的智能轨迹规划。
未来可通过传感器对机器人工作环境和自身的工作状态进行智能感知。视觉传感器获取的图像能够实时确定位姿信息,力传感器则能监测机器人末端执行器的受力状况,通过云计算和人工智能技术,并借助5G通讯网络,使得机器人能够快速自我学习。对大量的不同工况的机器人轨迹规划数据进行分析,机器人能够面对不同加工对象,自适应选取插值关键点;针对不同加工场合,自适应选取不同的轨迹插值方法;面对不同加工要求,动态调整多目标优化参数。单一的视觉传感器获取的信息有限,多种传感器共同作用,实现多传感器信息融合,将能规划出更好的轨迹,这也是今后轨迹规划研究的一个重点。
