面向航天器的时间敏感网络技术应用研究
2022-11-09曹素芝余子晗李焕菁
曹素芝, 余子晗,2, 刘 鹏, 李焕菁,2
(1.中国科学院空间应用工程与技术中心, 北京 100094; 2.中国科学院大学, 北京 100049)
1 引言
航天器网络是航天电子系统的重要组成部分,目前主要使用FC-AE-1553、航空电子全双工交换式以太网(Avionics Full Duplex Switched Ethernet,AFDX)和SpaceWire 等技术来构建航天器网络[1]。 随着航天技术的快速发展和新型应用场景的出现,航天器网络对于承载流量带宽、端到端时延的要求不断提高[2-4]。 而国内现有航天器网络技术存在接口种类繁多、没有统一的硬件架构、缺乏统一标准、智能化设计水平不高和开发成本高昂等问题,无法适应航天电子系统综合化发展的需求。 时间敏感网络(Time Sensitive Network, TSN)基于传统以太网技术,通过流量调度、时间同步等机制使以太网支持高可靠、低时延特性,具有在航天器网络上应用的潜力。
为实现在航空航天、车载、工业互联网等领域的兼容性,时间敏感网络系列标准存在过于庞大的问题,需针对具体的应用领域对标准族进行取舍[5-6]。 目前,对于时间敏感网络在航天领域适用的垂直行业标准IEEE 802.1DP 处于讨论阶段,有必要对现有主流时间敏感网络调度技术在航天器上的适应性进行研究。 Chaine 等[7]对航天适用的时间敏感网络技术进行探讨,但缺乏对多种调度机制对网络时延性能影响的研究。 Simon 等[8]使用OMNeT++网络仿真软件对时间敏感网络调度机制时延进行研究,但仅局限于简单网络拓扑,不适用于复杂的航天器网络拓扑。
本文从航天电子系统网络对高带宽、低时延和确定性的需求出发,对时间敏感网络技术在航天电子系统上的应用进行适应性分析。 针对航天器网络拓扑和航天器网络中传输的数据业务类型,在典型场景中应用时间敏感网络相关调度机制,并基于时延分析软件RTaW-Pegase,对航天器网络应用时间敏感网络技术前后不同数据业务的端到端时延进行仿真验证,明确在面向航天器网络的基础架构上应用时间敏感网络的可行性。
2 需求分析与架构设计
2.1 航天器数据业务需求分析
以欧洲航天局的SAVOIR 星上参考架构中的分类为例,航天器网络中传输的数据类型可以划分为多种类型,不同的星上数据传输类型其传输频率及数据量不等,对时延和抖动的要求也有所区别。 针对航天器网络中不同的数据业务需求,航天器网络应至少满足如下需求[7]:
1) 能够支持几十个端系统接入,以满足航天器平台上各类传感器、执行器和科研设备的接入需求。
2) 网络中能够同时处理高速率和低速率数据流,即能同时满足平台网络和载荷网络的流量传输需求。
3) 网络能够在应对低延迟和低抖动流量传输的同时,保证对延迟和抖动不敏感但吞吐率大的流量的传输。 能够适配尽力而为流、带宽敏感流和时延敏感流等不同流量的业务需求。
4) 网络机制简单,方便对网络质量进行分析和对网络参数进行配置。
2.2 航天器网络拓扑结构
图1 展示了一个符合SAVOIR 参考架构的典型卫星网络拓扑结构。 航天器平台通常根据功能不同划分为2 个相互连通的网络:平台网络及有效载荷网络。 平台网络负责传输航天器上各个传感器产生的数据与航天器控制相关的命令,这些数据的数据量较小,但对时延要求敏感;有效载荷网络负责传输航天器上各个有效载荷产生的数据,这些数据的数据量往往较大。 图1 标明了2种网络的范围,并体现出了平台网络中一些典型星载传感器的连接方式。

图1 典型卫星网络拓扑结构Fig.1 Typical satellite network topology
航天器的运行环境特殊,要求卫星网络的运行平稳可靠,在出现单点故障等突发状况时依然能够正常运行。 网络拓扑结构的冗余设计,包括同分支冗余、交叉分支冗余、跨层冗余、双端口冗余和主备双机等,能够确保卫星网络满足上述要求。 以图1 中的网络为例,电源系统、通信系统、星载计算机与星载传感器都有主备2 套,有效载荷有2 个端口分别连接2 台互为备份的开关设备,实现双冗余交换。
基于时间敏感网络的航天器网络在网络拓扑结构上与传统航天器网络并无差别,仅需将时间敏感网络技术和网络中其他技术进行桥接,作为统合各种接口技术的桥梁,以此应用于航天器网络,应用方案如图2 所示。 以时间敏感网络作为航天器的骨干网部分,与当前航天器网络现有的各种总线进行连接,可以支持多种网络架构组成混合网络拓扑,对传统载荷和特殊需求载荷提供传统接口,对新引入的商用现货以太网设备提供以太网接口,保证与现有航天网络技术的兼容性,以实现多种业务类型的共网传输。

图2 TSN 与传统航天器网络相结合的网络架构Fig. 2 Network architecture combining TSN with traditional spacecraft network
3 调度机制与时延分析
航天器网络对低时延、高可靠性、高确定性和QoS 均有需求。 在时间敏感网络中传输的可靠性依靠IEEE 802.1CB 标准来保障,通过冗余备份在物理上提高可靠性。 同时调度机制对时间敏感网络中的精确时延估算影响很大。 因此需要适合的调度机制来保障服务质量,实现确定性有效传输,并根据选择的调度机制进行精确时延计算。
3.1 调度机制与适配分析
对于航天数据业务场景,需要结合实际应用流量需求,选取如表1 所示3 个调度机制简化网络调度复杂度,同时缩短配置表项数量。

表1 适合航天器网络的调度机制Table 1 Scheduling mechanism suitable for spacecraft network
1) 时间感知整形器。 时间感知整形器由IEEE 802.1Qbv 标准定义,可将数据帧划分为1 ~8 个不同的静态优先级[9],其作用机制如图3 所示。 而对于数据帧的优先级区分可以通过IEEE 802.1Q 规定的以太网VLAN 字段中的3 bit 优先级字段来区分。

图3 时间感知整形器Fig.3 Time aware shaper
时间感知整形器对于每个优先级队列引入了传输门,传输门有开、关2 个状态。 传输的选择过程仅选择那些数据队列的门是开状态的信息,而这些门的状态由门控制列表定义。 门控制列表每隔一段时间切换状态,通过不断循环执行门控制列表实现时间感知整形。
2) 帧抢占机制。 为了解决时间感知整形器中存在的保护带对带宽的占用问题和低优先级反转问题,IEEE 802.1Qbu 规定了帧抢占机制[10]。将数据帧按照优先级分为可被抢占(低优先级帧)和不可被抢占(高优先级)2 种。 当高优先级帧准备好传输时,若此时低优先级的帧仍在占用传输队列,则高优先级帧可以抢占其传输,等高优先级帧传输完成再恢复低优先级帧的传输。 帧抢占机制的引入降低了高优先级帧的传输等待时间。
3) 预整形机制。 预整形机制是对时间感知整形器的进一步优化,对于流量在中继节点的传输过程不做处理,而在流量注入网络的端节点进行操作[11]。 预整形要求在端节点对于流量注入网络中的时间进行规划,在满足端到端时延约束的情况下,尽量保持一个合理的流量注入网络的时间间隔,从而减少网络中高优先级流量可能出现的延迟,以提高网络传输性能。
通过上述3 种时间敏感网络的调度机制,基本上可以满足航天器网络中的流量传输需求。
3.2 基于网络演算的精确时延分析
网络中数据帧在端到端传输的时延可以定义为从源节点到目的节点的路径中,在每一跳节点出现延迟的总和。 其中,时延可根据类型不同分为数据存储时延、链路传播时延、交换机处理时延等类型,这些时延可近似为一个确定值进行计算。 因此,对一条应用流,分析其流经的每一条中继节点而产生的时延,则可计算出该流的端到端时延。
在时间敏感网络中,其流量调度机制主要由时间感知整形机制实现,相应优先级的流量仅能在其对应优先级的门控状态为开的情况下传输,故该机制将产生额外的门控列表开关等待时延。根据网络拓扑中不同的应用流量情况,中继节点应用的门控列表也会相应发生改变,这对端到端时延带来了不确定性,因此,为确定时间敏感网络的端到端时延特性,需要分析流量传输中的各个过程,以实现对网络的精确时延预估。
为了确定数据传输时受突发流量干扰情况下的网络延迟性能,而发展出了网络演算理论。 网络演算使用基于最小加代数的理论工具,由到达曲线、服务曲线和推算定理3 个部分组成[12-13]。
1)到达曲线:一条流可由累积函数R来表示,R(t) 是该流在时间t内发送的总比特数。 给定广义增函数α, 当满足∀t,s≥0,R(t+s)-R(t) ≤α(s),则称流R有到达曲线α。
2)服务曲线:接收并对流进行转发的服务器S反映了输入累积函数R和输出累积函数R′ 直接的关系,且满足R′≤R。 则说明流R经过服务器S转发并生成相应的输出流R′。 如果对于任意时刻t,R′≥R⊕β,这样的服务器S具有服务曲线β。

对于一条流Ri,在其途经节点k(1 ≤k≤n)的输出曲线和下一节点k+1 的输入曲线的关系可以表示为式(1):

使用网络演算对时间敏感网络进行时延分析的流程如图4 所示。

图4 网络仿真流程Fig.4 Flowchart of network simulation
4 仿真结果及讨论
为了验证时间敏感网络在航天器网络上应用的可行性,本文以航天器网络中的流量端到端时延为分析目标,使用RTaW-Pegase 网络时序分析工具,对比分析简单网络拓扑及航天器拓扑中应用时间敏感网络技术前后的端到端时延。 实验中网络链路的传输带宽为100 Mbit/s,交换机造成的转发延迟设置为5 μs。
4.1 简单拓扑示例
为了验证时间敏感网络的优先级队列机制和门控制列表机制对网络传输的端到端时延影响,设计了如图5 所示的简单拓扑。

图5 简单拓扑示例Fig.5 Simple topology example
对于图5 的拓扑,BE_tx1、BE_tx2、BE_tx3 分别发送周期为0.5 ms 的尽力而为流;ST_tx 发送周期为0.5 ms 的时间敏感流。 具体流量特征如表2 所示。 其中,ST_tx 流设置优先级为7(最高优先级),其余流设置其优先级为6。 应用优先级划分前后的流量端到端时延见表3。

表2 简单拓扑示例发送的流量说明Table 2 Description of traffic sent by simple topology example
从表3 中可以看出,如未应用优先级划分,ST_tx 流的端到端时延无法满足约束。 应用优先级划分之后,平均时延降低,最坏时延满足约束,而BE 类型流量的平均时延和最坏时延都增加。 说明应用时间敏感网络的优先级队列机制,可以提供高优先级队列更好的质量保证,但会影响低优先级队列的流量传输。

表3 应用优先级划分前后端到端时延对比Table 3 Comparison of end-to-end latency before and after application prioritization ms
为了验证门控列表机制对于流量传输的影响,在图5 所示的简单拓扑和表2 的业务流量基础上,对交换节点添加门控表机制,门控表执行周期固定为50 μs,不断调整门控列表计算的粒度。表4 为应用不同粒度门控表之后,模拟流量传输30 min,得到的ST_tx 流量的端到端传输时延统计。
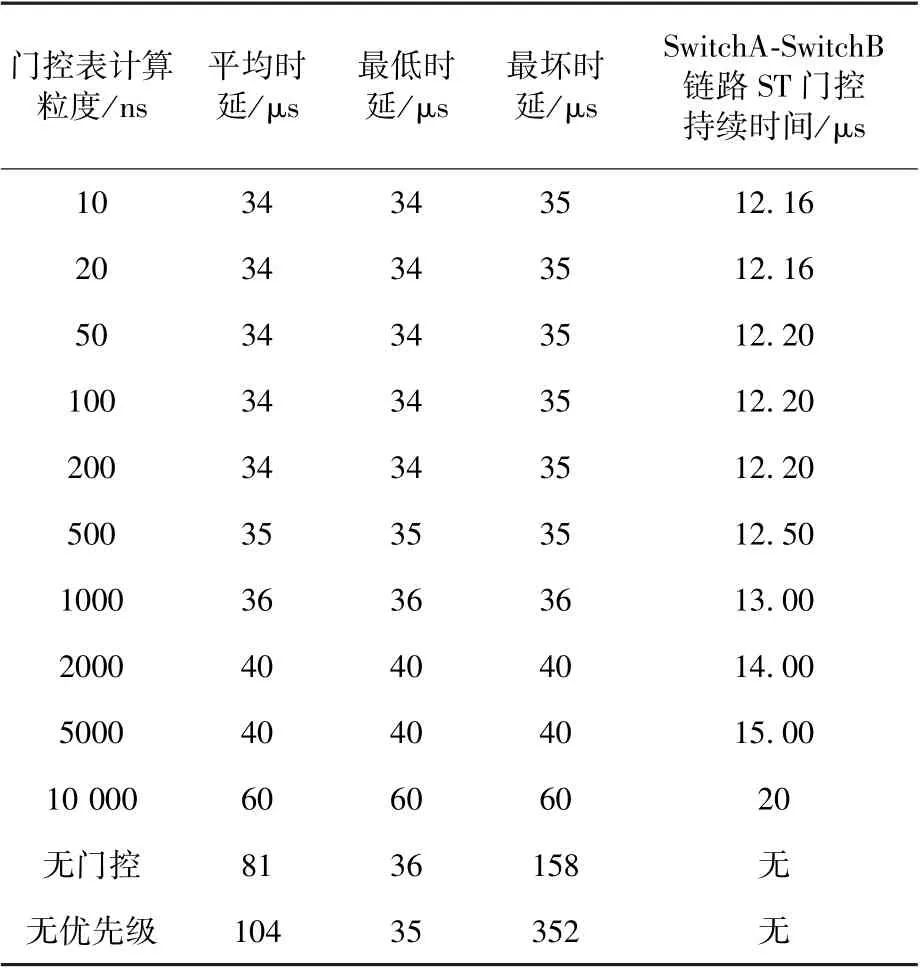
表4 不同门控表粒度下ST 流量的端到端时延Table 4 End to end delay of ST traffic with different gating table granularity
从表4 可以看出,在相同门控表周期时间下,随着门控表计算粒度的增加,ST 流量的端到端最坏时延逐渐增加,同时端到端平均时延也逐渐增加。 同时,在链路SwitchA-SwitchB 上分配给ST流量的时长也逐渐增加。 与无门控表机制和无优先级机制相比,使用门控表机制大大降低了端到端时延。 同时,门控表计算粒度越小,对高优先级流量门控调度越精细,其延迟也越小。
通过简单拓扑示例的实验,说明了时间敏感网络的优先级队列以及门控制列表机制能够有效降低高优先级流量的端到端时延,可进一步应用于航天器网络。
4.2 航天场景示例
本节使用MIURA-1 探空火箭网络拓扑[9]和国际空间站网络拓扑来对时间敏感网络在航天器上的应用进行验证。
西班牙PLD 航天公司的MIURA-1 号探空火箭上应用了时间敏感网络技术。 根据项目执行方案,可将MIRUA-1 号的网络拓扑抽象为图6 所示[16]。 其中,方形蓝底代表交换机,方形橙底代表终端。 假设其中链路的传输速率都为100 Mbit/s。

图6 MIRUA-1 号探空火箭网络拓扑[16]Fig.6 Mirua-1 sounding rocket network topology[16]
根据MIURA-1 探空火箭的功能,可将其网络拓扑传输的应用流量类型分为控制类流量、遥测类流量、视频类和时间同步类流量4 类。 为了保证数据传输的冗余度,每条流量采用2 组不同的路由路径传输到接收节点。 具体流量传输特征以及传输数量如表5 所示。

表5 MIRUA-1 号传输流量说明Table 5 Mirua-1 transmission flow description
为验证传输的时间同步帧对整个网络中的应用流量造成的影响。 实验分为2 个不同场景:网络中包含时间同步帧且时间同步帧的优先级为最高的场景(AS Above)和网络中包含时间同步帧且时间同步帧的优先级低于控制类流量的场景(AS Below)。 AS Above 场景中流量类别的优先级排序为:时间同步类>控制类>遥测类>视频类;AS Below 场景中流量类别的优先级排序为:控制类>时间同步类>遥测类>视频类。 图7 展现了时间同步帧优先级对端到端时延的影响。 当时间同步帧被设置为最高优先级,大部分同步帧的端到端时延相较于设置为次高优先级降低。 当航天器网络中若对时间同步精度要求较高,可将时间同步帧优先级设置为较高优先级来保证时间同步帧的传输时延,以提升时间同步精度。

图7 2 个场景下的时间同步帧的端到端时延对比Fig.7 End to end delay comparison of time synchronization frames in different scenarios
图8 是2 个场景下控制帧的端到端最差时延对比。 As Above 场景的控制帧端到端最坏时延较As Below 场景的更高,这是由于时间同步帧对于控制帧的优先级抢占的影响,控制帧需要等待高优先级的时间同步帧传输完成才能进行传输。所以,在航天器网络中应用时间敏感网络的时间同步技术时,需要对最高优先级的应用流量类型的设置进行权衡,结合实际场景的使用需求对时间同步帧进行优先级设置。 如果优先级设置不当,反而会影响原本的应用数据传输。

图8 含时间同步帧2 种场景的控制帧端到端时延对比Fig. 8 End to end delay comparison of control frames in two scenarios with time synchronization frames
为了验证时间敏感网络在综合复杂航天场景下应用多种调度技术的可行性,以图9 所示假设的国际空间站复杂网络拓扑场景为例[17]。 在该网络拓扑结构下随机生成3 组网络流量,每组网络流量包括80 条流,包含控制流量、遥测流量和视频流量的场景,如表6 所示。 并对每组流量场景,分别对比在流量无优先级划分、优先级划分、应用预整形+优先级划分+帧抢占的流量端到端时延情况。

图9 国际空间站网络拓扑结构[17]Fig.9 International Space Station network topology[17]

表6 国际空间站网络拓扑传输流量参数Table 6 International Space Station network topology transmission traffic parameters
表7 展示了针对这3 组网络流量中控制流量在应用3 种不同优先级组合之后的时延比较。 可以看出,应用优先级调度策略之后,控制流量的平均端到端时延和最大端到端时延相比于无优先级调度策略有了下降,同时方差平均值也降低,说明控制流量的时延抖动性更低,流量的确定性得到了提升。 同时,在应用了预整形+优先级+高优先级流量帧抢占机制之后,控制流量的确定性得到进一步提升。

表7 控制类流量在不同调度机制下的端到端时延Table 7 End to end delay of control class traffic under different scheduling mechanisms
表7 表明时间敏感网络的多种调度机制在复杂的航天网络场景拓扑下是可行、有效的,能提升航天器网络中高优先级流量(如控制类流量)的性能。
通过上述实验数据可知,在航天器中应用时间敏感网络技术可以有效改善网络中关键流量的时延,验证了在航天器中应用时间敏感网络的可行性。 同时,在航天器上应用时间敏感网络时,仍需结合具体应用特征选取相应的调度机制组合,来保证关键流量类别的传输要求。
5 结论
本文探讨时间敏感网络在航天器上应用可行性,设计了基于时间敏感网络的航天器网络架构,并设计合理的调度策略,在此基础上研究时间敏感网络对于流量传输端到端时延的改善。
使用网络时序分析工具对航天器网络进行实验仿真,分析不同调度机制下的端到端时延,验证时间敏感网络在航天器网络上应用的可行性。 结果表明,在航天器网络上应用时间感知整形器、帧抢占、预整形等时间敏感网络相关技术,能提高航天网络传输的带宽、降低端到端时延、提高网络设备接入的通用性,为航天器网络中应用时间敏感网络、选用调度机制、优化网络配置提供了参考。
随着IEEE 在航空航天领域的TSN 配置标准(IEEE 802.1DP)的推进,该项标准预计2023 年4月完成,先进的确定性网络技术会加快航天器网络智能化进程,使时间敏感网络能够更好地适配航天器网络。
