星链卫星碰撞威胁及预警策略研究
2022-11-09张荣之王秀红
张 炜, 张荣之, 王秀红, 赵 治, 卢 欣
(西安卫星测控中心, 西安 710043)
1 引言
根据美Space-track 网站发布的数据,目前可被探测的空间目标数量已超过2 万个,空间目标彼此间发生碰撞的几率明显增加。 实施轨道机动以规避高风险碰撞事件几乎成为各航天大国为保证各自航天器和空间站安全需开展的常规动作[1]。 常用的碰撞预警方法有BOX 区域法[2]和碰撞概率法[3-4]。 早期美国航天飞机的碰撞预警采用BOX 区域法,以航天飞机为中心,若有空间目标进入其沿迹方向±5 km、径向及法向±2 km范围内时,航天飞机进行机动规避碰撞风险。 后逐步演化使用碰撞概率Pc作为判据,对于国际空间站(International Space Station, ISS)和航天飞机,设置了碰撞概率中风险阈值(Pc=10-5)和高风险阈值(Pc=10-4),若Pc大于高风险阈值,就要进行规避控制,避免造成航天器硬件损伤[5]。
随着巨型星座的逐渐部署,针对巨型星座开展空间安全分析已成为当前的研究热点[6-9]。 星座大规模部署,将对空间碎片环境的可持续性产生重大影响。 一方面,卫星发射活动将增加空间碎片环境的密度,影响空间环境的稳定性;另一方面,星座卫星与其他在轨目标之间、星座卫星与星座卫星之间均存在碰撞风险,一旦发生空间碰撞事件极易产生凯斯勒效应,最终导致卫星无法长期安全运行。
星链(Starlink)计划是SpaceX 公司推出的全球高速卫星互联网计划,旨在通过太空在全球范围内提供互联网接入服务,计划部署4 万余颗卫星,是迄今为止最庞大、最具代表性的巨型星座。本文从星链卫星的部署规律出发,分析了不同阶段星链卫星对其他在轨卫星的碰撞威胁,针对其频繁机动导致编目轨道预报误差大等实际情况,分析了双行根数(Two Line Element, TLE)的精度,验证了碰撞概率判据的适用性,并提出了针对性的碰撞预警策略。
2 星链星座部署规律
2017 年3 月美国联邦通信委员会(Federal Communications Commission,FCC)批准SpaceX 公司发射4425 颗星链卫星,2018 年11 月15 日又批准第二批共7518 颗卫星的发射计划,星链星座规划的卫星数达到了惊人的1 1943 颗。 为了减少如此数量庞大的卫星星座对近地空间造成的影响,2018 年12 月SpaceX 公司对星链计划做出修订,削减了第一批第一阶段的卫星总数,由1600颗减少至1584 颗,轨道高度由1150 km 降至550 km,分布于24 个轨道面。 2019 年8 月,SpaceX公司再次对部署进行了修改,由24 个轨道面调整为72 个轨道面。
单颗星链卫星重约为260 kg,等效半径为2.39 m[6]。 受限于火箭运载能力和发射成本,一般使用批量方式发射入轨,一批一般为60 颗,入轨高度较低,入轨后利用氪离子发动机进行轨道机动,逐步部署至工作轨道。 以第17 批星链卫星为例,基于Space-track 网站公开发布的TLE 根数[10],入轨后,该批60 颗卫星的轨道高度变化情况如图1 所示,其中每一条线表示一颗卫星的轨道高度变化,颜色相同的为同一组卫星,最终部署于同一个轨道面。

图1 第17 批星链卫星轨道高度变化情况[10]Fig. 1 Orbital altitude of the 17th batch of Starlink satellites[10]
图中可以看到,星链卫星发射入轨后主要有以下阶段:
1)调整阶段。 卫星发射入轨后进行轨道机动抬升至较低轨道(一般为350 km 或380 km),进入调整阶段,开展卫星状态测试,并进行轨道面部署调整,也可称为停泊阶段。
卫星在调整阶段停留的时间并不固定,短则几天,长则数月,主要取决于星座构型需求。 同一批星链卫星的倾角相同,轨道面的差异主要来源于升交点赤经的漂移。 根据卫星轨道理论,升交点赤经的变化率可以表示为式(1)[11]:

式中,Ω为升交点赤经,i为倾角,p为半通径,J2为地球扁率特性的二次带谐项,n为平均运动速度。 例如对于第17 批星链,其倾角为53 °,调整阶段高度为380 km,升交点赤经的变化率约为4.89 °/d,550 km 工作轨道升交点赤经的变化率约为4.66 °/d,因此卫星经调整阶段可形成的升交点赤经差Δφ可近似表示为式(2):

式中,t1为卫星在调整轨道停留的时间差,t2为从调整轨道机动至部署轨道的耗时,φ′为卫星机动过程对升交点赤经的修正量。
2)抬轨阶段。 一般来说,同一批星链卫星入轨后采用分组的方式爬升至工作轨道,同一轨道面为一组。 同一批卫星从调整轨道爬升至工作轨道耗时基本相同,表明同一批卫星发动机参数及控制参数基本一致,例如第17 批星链卫星,耗时均为25 d 左右,每天抬升约6.8 km。 但是不同批次参数可能存在差异,例如第2 批星链,从调整轨道(高度为350 km)爬升至工作轨道耗时约33 d,每天抬升约6.0 km。
3)部署阶段。 卫星通过轨道抬升到达预定工作轨道并实施部署,当前该高度主要为550 km和540 km,为维持部署高度,卫星需要进行常态化机动,以抵消大气阻力的耗散作用。
此外还有降轨阶段,SpaceX 公司对寿命末期的星链卫星实施主动降轨控制,以缩短卫星的在轨时间。 另有少部分星链卫星处于自然衰减状态,在大气阻力的作用下逐渐再入大气层,这类卫星可当成普通无控空间目标处理。
3 碰撞威胁分析
利用TLE 数据对2 颗在轨卫星进行碰撞预警计算,所选取卫星的基本信息如表1 所示。 其中,40903 号卫星的平均轨道高度约为401 km,与星链卫星的调整阶段高度、部署阶段高度均无交叉,预警计算时段为2022 年2 月1 日至28 日;44777 号卫星的平均轨道高度约为538 km,与星链卫星部署阶段高度存在交叉,预警计算时段为2021 年10 月1 日至31 日。 预警计算时段内未来3 d 接近距离小于5 km 的事件次数如图2 所示,上图为40903 号卫星每日预警的接近事件次数,下图为44777 号卫星每日预警的接近事件次数,均区分了星链卫星和星链卫星以外的所有其他空间目标。

表1 两颗在轨卫星的基本信息Table 1 Basic information of two test satellites
从图2 可以看到,2 颗卫星所受的星链卫星碰撞威胁情况相差很大。 对于40903 号卫星,仅2 月23 日至25 日存在1 次与星链卫星的接近事件,其余时段均无近距离接近事件,该接近事件中的星链卫星为2021 年12 月18 日发射的第33 批星链卫星中的一颗,在抬轨过程中穿过40903 号卫星的运行区域造成碰撞风险。 44777 号卫星由于与星链卫星的部署高度存在交叉,全时均存在高频次碰撞风险,所预警时段内,由星链卫星造成的接近事件次数日均约16.5 次,而其他空间目标造成的接近事件次数日均不到4 次,由星链卫星造成的碰撞威胁占约82%。

图2 两颗在轨卫星每日预警次数情况Fig.2 Closest events of two test satellites
综合分析星链卫星的碰撞威胁结果,主要有以下3 类情况:
1)处于调整阶段的星链卫星,高度一般为350 km 或380 km。 目前中国在此高度区域无卫星运行,星链卫星的影响基本可忽略;
2)抬轨/降轨阶段的星链卫星。 星链从调整轨道抬升至部署轨道,或从部署轨道降轨再入大气层,需穿过350~550 km 高度层,所有运行于该区域的卫星均可能受到影响。 但是由于星链卫星轨道高度抬升(或降低)速度在5 km/d 以上,威胁时间短,影响相对较小;
3)处于部署阶段的星链卫星。 当前星链卫星的部署高度主要为550 km 和540 km,由于卫星部署密集,单一壳层卫星数量超过1500 颗,是对该区域其他卫星影响最大的一类。
无论哪类星链卫星,均采用小推力模式进行轨道机动,且不同阶段卫星的控制策略差异较大,造成编目难度大。 由于无法获知准确控制参数及后续轨控计划,与其他无控类空间目标相比,星链卫星的轨道预报误差更大,轨道结果用于测站跟踪预报或碰撞预警计算的效果较差。 因此,需要针对星链卫星制定针对性的预警策略。
4 碰撞预警策略
4.1 星链卫星TLE 精度分析
4.1.1 方法
在无法获取精密轨道的情况下,可使用内符合方法进行星链卫星TLE 精度分析。 假设存在2条TLE,历元分别为t1和t2(t1<t2),选定第2 条TLE 为基准根数,并基于SGP4 模型生成某一时段内(一般是t1~t2之间)的位置速度作为基准轨道;利用第1 条TLE 生成相同时段的位置速度,并与基准轨道进行比较,即可得出该时段内第1条TLE 的精度情况。 内符合方法的关键在于找准基准轨道的时段,使得该时段的基准轨道与实际轨道最接近。 一般而言,TLE 前向预报和后向预报的精度是不同的,这主要取决于预报时段与拟合TLE 所使用轨道数据时段的重叠情况[12-13]。
以星链-2017(NORAD 编号为47351)为例,选取该目标2 条TLE,历元分别为2021-02-23 19 ∶51 ∶31.98(UTC) 和2021-02-24 18 ∶52 ∶13.74(UTC),间隔约为1 d,使用上述方法进行精度分析,结果如图3 所示。 从图3 可以看出,TLE1 的误差主要在横向(T方向),随时间逐渐减小,在TLE2 历元时刻附近达到最小值,后又逐渐增大。此特性与其他空间目标有很大不同。 一般而言,空间目标TLE 由定轨段数据拟合,TLE 历元为测量数据最后一点或最近升交点,因此前向预报与实际轨道较为接近。 而星链卫星大多处于频繁轨控状态,为了使预报段获得更高的轨道精度,拟合TLE 时采用的是含轨控计划的预报段数据。 针对星链卫星的这一特点,并结合误差呈短周期变化的规律,对轨道生成策略进行适应性调整,选取的比较时段为(t2,t2+Tsat) ,其中,Tsat为卫星轨道周期,分析该时段内TLE1 的误差情况,作为TLE1 预报时长(t2-t1) 的误差最大值。

图3 内符合法TLE 精度示例(以星链-2017 为例)Fig.3 Accuracy for TLE using internal coincidence method(take Starlink-2017 as example)
4.1.2 数据
目前可公开获取的星链卫星TLE 数据包括2类:①基于美SSN 监测网数据的编目结果,TLE的分类标识栏为U;②基于SpaceX 公司发布的含控制计划的星历数据拟合结果,TLE 的分类标识栏为C,本文记为TLE_C。 本文主要分析TLE_C数据的精度情况。
选取的2 个算例目标信息如表2 所示。 其中,星链-2305 发射于2021 年3 月24 日,2021 年10 月16 日至11 月18 日该卫星处于抬轨阶段,平均抬升速度约为6.0 km/d;星链-1751 发射于2020 年9 月3 日,2021 年11 月10 日至12 月31日该卫星处于降轨阶段,期间11 月26 日至12 月9 日无降轨动作,平均降低速度约为6.7 km/d。

表2 两个算例目标的基本信息Table 2 Basic information of two test objects
4.1.3 结果
使用4.1.1 节所述方法分析2 个算例目标的轨道预报精度。 其中,表3、图4 为星链-2305 TLE_C 数据预报1 d 和2 d 的误差情况,表4、图5 为星链-1751 TLE_C 数据预报1 d 和2 d 的误差情况,σR、σT和σN分别为预报误差在RTN坐标系中径向、横向和法向分量的标准差。此外,采用相同的方法分析了2021 年11 月3 日处于调整阶段的93 颗星链卫星TLE_C 精度情况,结果如表5 所示。 部署阶段星链卫星的精度情况与调整阶段星链卫星相当,此处不在详述。

表5 调整阶段星链卫星TLE_C 的精度情况Table 5 The accuracy of Starlink satellites in adjustment stage using TLE_C

图4 星链-2305 TLE_C 数据的精度情况Fig.4 The accuracy of Starlink-2305 using TLE_C
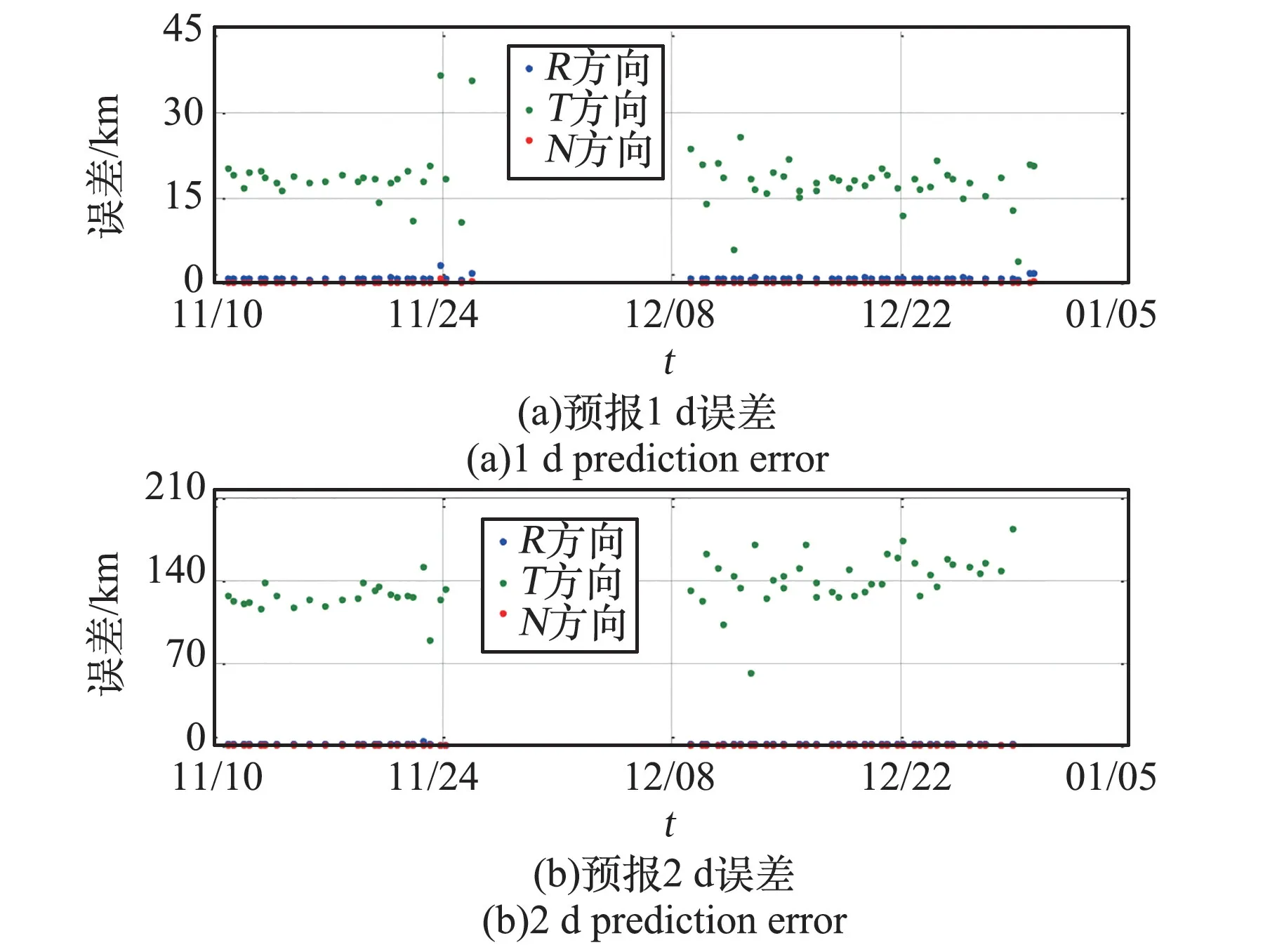
图5 星链-1751 TLE_C 数据的精度情况Fig.5 The accuracy of Starlink-1751 using TLE_C

表3 星链-2305 TLE_C 数据的精度统计Table 3 The accuracy of Starlink-2305 using TLE_C

表4 星链-1751 TLE_C 数据的精度统计Table 4 The accuracy of Starlink-1751 using TLE_C
根据精度分析结果,可以得出以下结论:
1)TLE_C 的置信期较短,一般不超过24 h。例如调整阶段的星链卫星24 h 预报误差一般小于3 km,48 h 预报误差接近40 km,原因可能是拟合TLE_C 时采用的是星历数据的前部分数据,而非完整段;
2)不同阶段星链卫星的预报精度不同。 一般来说,调整阶段和部署阶段星链卫星的TLE_C精度最高,预报24 h 位置误差一般小于3 km,其次是抬轨阶段的星链卫星,预报24 h 位置误差一般小于8 km,降轨阶段的星链卫星精度最差,预报24 h 位置误差一般小于20 km。
另外需要说明的是,由于进行比较的2 条轨道均基于SGP4 模型计算,存在系统模型误差[14],因此实际误差要大于本文分析结果。
4.2 碰撞概率判据的有效性分析
碰撞概率Pc是卫星碰撞预警工作中的一种常见判据。 碰撞概率值不仅取决于交会时刻卫星与空间目标的空间位置关系,还与2 个目标的尺寸、位置速度几何关系、位置速度的不确定性等因素相关。Pc是两目标中心的距离小于等效半径之和的概率,可以表示为式(3):
式中,ρ表示两目标中心的距离,R为两目标的等效半径之和。
碰撞概率的显式表达式可以表示为式(4)[15]:


假设Δh、Δl均为0(即2 个目标的接近距离为0),在轨卫星的等效半径为5 m,星链卫星的等效半径为2.4 m,为1000 m,为300 m,Pc随星链卫星T方向分量误差的变化如图6 所示。从图6 可以看出,随着T方向误差增大,碰撞概率减小,且轨道面夹角越小,变化越明显。 若轨道面夹角φ为20 °,T方向误差为5 km 时,碰撞概率约为5.5E-6;T方向误差为10 km 时,碰撞概率约为2.8E-6。 若轨道面夹角为φ为150 °,T方向误差为5 km 时,碰撞概率约为2.1E-5;T方向误差为10 km 时,碰撞概率约为1.0E-5。 另外,图6 示例中假设2 个目标的接近距离为0,实际计算时几乎不可能出现,而Pc随Δh、Δl的增大而减小,因此实际计算出的碰撞概率更小。

图6 碰撞概率随T 方向误差变化Fig.6 Changes of collision probability with the error in T direction
以4.1 节中的2 个算例目标为例,利用公开的TLE 数据计算与48274 号航天器的接近情况,计算碰撞概率时48274 号航天器的等效半径取为20 m,结果如表6 所示。 最终得到星链-2305 卫星与该航天器的碰撞概率为9.8E-7,星链-1751 卫星与该航天器的碰撞概率为3.5E-6,均小于1E-5。

表6 2 颗星链卫星与48274 号航天器的接近情况Table 6 The collision information between two Starlink satellites and Satellite No. 48274
若轨道误差过大,空间目标位置定位的不确定性增大,碰撞概率衰减至一个很小的值,但是并不意味着碰撞风险减小,最终导致碰撞概率置信度降低[16]。 在与星链的碰撞问题中,碰撞概率判据是否有效主要取决于轨道数据的精度情况。 抬轨阶段星链卫星TLE 数据T方向24 h 预报误差一般大于8 km,降轨阶段的误差更大,基于TLE进行碰撞预警计算几乎不可能出现高风险接近事件(碰撞概率值大于1E-4),因此认为碰撞概率不适合作为2 个阶段星链卫星的预警判据;而调整阶段和部署阶段星链卫星的TLE 数据精度较高,碰撞概率值仍具有较高的置信度。
4.3 针对星链卫星的碰撞预警策略
根据第2 节星链卫星部署规律、4.1 节TLE数据精度情况及4.2 节碰撞概率判据适用性的分析结果,针对星链卫星的碰撞预警策略建议如下:
1)由于星链卫星TLE 的置信期较短,需要对星链卫星的预警时长进行调整,一般预警时长不超过24 h;
2)不同阶段星链卫星的轨道数据精度不同,需采用不同的判据。 对于调整阶段和部署阶段的星链卫星,由于TLE 数据的精度较高,可采用碰撞概率或碰撞概率与BOX 区域相结合的判据;对于抬轨或降轨阶段的星链卫星,在当前精度条件下几乎不可能出现碰撞概率大于1E-4 的高风险接近事件,与碰撞威胁客观存在的实际不符,因此建议采用BOX 区域作为预警判据;
3)采用BOX 区域作为判据时,需要根据不同阶段星链卫星的轨道精度情况分别确定各方向的距离阈值;
4)星链卫星的轨控计划与实际轨控的实施可能存在差异,导致少数TLE 的误差较大,可通过增加预警频次来降低影响。
5 结论
1)在轨卫星受星链卫星的碰撞威胁情况与卫星运行区域有关。 若卫星运行于350 ~550 km高度之间,接近事件与星链卫星的抬轨时机有关,影响较小;若卫星运行于星链卫星的部署高度,星链卫星的影响很大,部分卫星80%以上的碰撞威胁均来自于星链卫星;
2)对处于持续抬轨和降轨阶段的星链卫星,由于轨道预报误差大,碰撞概率的置信度降低,不适合作为该阶段星链卫星的预警判据;而调整阶段和部署阶段星链卫星的轨道预报精度较高,碰撞概率值仍具有较高的置信度。
