基于5G+工业互联网的AGV/移动机器人智能运维系统设计与应用*
2022-11-09夏鹏程崔继轩马川李骏
夏鹏程 崔继轩 马川 李骏
(南京理工大学电子工程与光电技术学院,南京 210014)
0 引言
随着中国“互联网+”等战略的提出,我国工业互联网和智能制造正处于加速发展的阶段。其中在仓储、物流、生产制造等工业场景中,自动导引运输车(Automated Guided Vehicle,AGV)或其他非轮式的移动机器人能够解决传统人工物料运输方式中劳动强度大和环境危险的问题,已经逐步成为工业生产运输过程中的核心装备[1-2]。但是,随着此类设备数量和使用时间的不断上升,企业将会面临设备故障发生频率增加、设备停机、产线停产等问题[3-4],因此尽可能有效减少设备故障发生概率和高效解决设备故障是企业在生产过程中的迫切需求。
目前,已经有很多研究者提出了针对AGV/移动机器人的各类故障诊断方法,如基于决策树和长短期记忆网络进行设备故障分类[5]、基于小波分析和神经网络检测设备的旋转机械故障[6]等。但是,上述事后维修的方法并不能避免设备出现问题,面对有大量AGV设备的生产线环境,企业亟需一套能够实现AGV/移动机器人实时监控和故障隐患提前分析预警的解决方案。随着5G技术的不断发展,许多工业互联网服务商与生产制造企业都提出了“5G+工业互联网”设备运维解决方案。三一集团利用5G园区专网接入AGV设备进行远程实时监控[7],上海电信利用5G网络切片技术保障设备数据的可靠传输[8]。“5G+工业互联网”相关技术的引入,可以让大数据驱动的预测性维护方法发挥潜在的优势。相比于传统的基于专家先验知识的预测性维护方法,大数据驱动的方法结合人工智能,利用实时采集监测的工业大数据进行数据分析与训练,能够充分挖掘数据的价值,发现更多设备故障发生前的隐患信息,从而更有效地避免或减少设备故障。
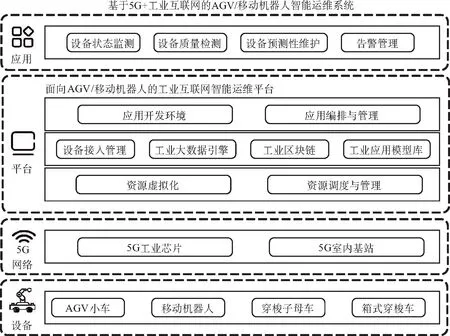
图1 AGV/移动机器人智能运维系统总体架构
结合上述研究现状与调研分析,本文总结了企业的几个痛点问题:其一,AGV/移动机器人原有的Wi-Fi通信方式延迟高且稳定性差,但5G改造方法和网络部署方案不明确;其二,AGV/移动机器人设备类型较多,采集的设备运维数据特征较多,企业缺乏有效的大数据处理方法;其三,企业缺少能够进行模型部署推理与快速构建运维业务应用的软件环境。针对上述问题,本文提出了基于5G+工业互联网的AGV/移动机器人智能运维系统设计方案,从网络、平台和应用3个层面给出了本系统的设计思路和建设方案,对系统中的智能运维模型优化方法进行了分析,并在某上市仓储设备制造企业中进行了系统的部署、测试与应用,实现了企业相关设备的实时状态监测和当前告警通知,并为企业提供预测性维护建议,减少了设备维修成本,提高了生产效率。
1 系统总体架构设计
针对企业目前建设AGV/移动机器人运维系统存在的问题和需求,本文提出了一种基于5G+工业互联网的智能运维系统架构(见图1)。
整个系统包含4个部分,其中设备层包括各类AGV或移动机器人设备,如AGV小车、穿梭子母车、箱式穿梭车等;网络层、平台层和应用层为智能运维系统的核心部分。网络层面,为各类AGV设备部署5G工业芯片,搭建企业现场级5G室内网络,提供高可靠、低时延的数据传输网络环境;平台层面,搭建面向AGV/移动机器人的工业互联网智能运维平台,实现企业相关设备的数据采集、汇聚、存储和分析,并提供运维业务应用的开发、构建与运行环境;应用层面,利用迁移学习、联邦学习、深度学习等算法训练优化设备故障诊断/预测模型,开发设备状态监测、预测性维护、质量检测、告警管理等运维业务应用,实现设备运行状态的多维展示和监控,当前告警及时通知,设备效能统计分析以及设备故障提前发现。
2 系统关键模块设计
2.1 5G网络的设计与搭建
AGV/移动机器人设备原有的Wi-Fi通信方式抗干扰能力差、延时抖动大、网络连接稳定性不足,难以满足工业现场对网络传输质量的需求。随着5G通信技术的成熟,企业考虑在生产现场引入5G网络,但是现有的5G网络大多为公网或混合网络的部署模式,无法保证重点生产作业区域的覆盖率和满足企业数据的安全隔离要求。因此,本文采用5G基站的室内建设方案,从工业5G终端到5G核心网均在企业生产环境内部署搭建,满足企业对网络可靠性、隔离性和安全性的要求(见图2)。

图2 5G网络设计方案
现场各类AGV/移动机器人设备安装工业5G模组,其中芯片根据高性能的5G新空口通信协议需求、生产作业场景的低功耗要求和设备安装尺寸需求进行封装设计,终端模组的基带通信算法采用极化码Polar和低密度奇偶校验码的信道编译码技术,可实现时延的精细控制。
针对企业生产环境的5G信号覆盖率与时延性需求,系统采用现场级室内5G基站方案,包括射频拉远单元(Pico Remote Radio Unit,pRRU)、5G数据汇聚单元(5G HUB)、5G基带处理单元池(Building Base Band Unit,BBU)和5G核心网。其中5G HUB扩展主要负责通用公共无线接口数据处理;BBU资源池负责集中调配基带资源,进行信号调制处理;pRRU主要负责射频信号处理,每个厂区的多个工作区域都会部署pRRU以尽可能地覆盖5G信号。
上述5G网络的室内建设方案,可以为AGV/移动机器人设备构建大带宽、广覆盖和高可靠低时延的网络通信环境,支持对设备的大规模实时调度控制,其实时采集的设备运行数据有助于智能运维系统对设备故障的快速诊断与预测分析。
2.2 云边协同的工业互联网智能运维平台技术架构设计
考虑到工业企业对各类AGV设备的运维大数据和运维业务应用缺少统一和高效的管理工具,并且同类企业间缺少可信的模型共享空间以进一步挖掘运维大数据的潜在价值,本文提出了一种云边协同的工业互联网智能运维平台技术架构,旨在帮助企业快速形成设备运维大数据的治理环境,并为运维业务应用软件的快速开发与构建提供支撑。
如图3所示,整个智能运维平台分为企业级工业边缘云管平台和行业级中心云公共服务平台。企业级边缘云管平台部署在各企业的私有云服务器上,基础设施即服务(Infrastructure as a Service,IaaS)层主要基于云原生技术将边缘云基础设施的计算、存储和网络资源虚拟化,并通过资源监控和调度功能进行资源的管理和分配;平台即服务(Platform as a Service,PaaS)层提供针对设备运维数据与运维业务应用的相关服务,包括数据接入与汇聚、数据存储、数据分析与应用支撑。其中,数据接入与汇聚服务采集设备的静态信息、运行状态数据和当前故障数据,通过边缘数据处理模块进行数据预处理和格式转换,并利用规则引擎转发数据至上层组件;数据存储服务可存储大量时序数据,通过工业私有区块链进行设备运维日志的可信存证与溯源审计,在故障专家库中不断存储并更新设备故障诊断与维护知识;数据分析服务提供数据的在线/离线分析环境,以及设备故障模型的训练和推理环境;应用支撑服务则提供应用的运行与管理功能。行业级中心云公共服务平台部署在公有云服务器上,以工业联盟链为基础,为同类型企业构建可信的模型资源共享环境,利用联盟链进行模型的确权,通过联邦学习框架帮助多家企业在数据不出厂的条件下完成设备故障模型的高效聚合,并提供工业应用模型库以供各参与企业进行模型的共享。平台的工业应用服务则提供运维业务应用的开发、测试、构建、分发和部署功能,方便企业相关应用的快速上线。
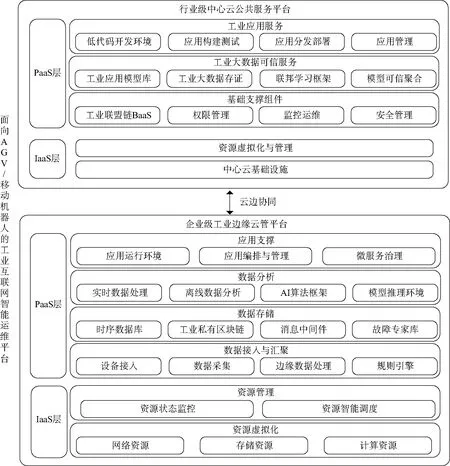
图3 云边协同的工业互联网智能运维平台技术架构
2.3 设备智能运维业务应用的构建方案设计
设备智能运维业务应用主要包括设备质量检测和预测性维护,需要以人工智能模型为核心进行开发构建,利用训练好的设备故障模型对实时数据流进行分析,从而给出设备维护建议并通知企业运维人员。因此,企业在设备智能运维业务应用的构建过程中,存在模型精度优化、模型实时推理、模型在线更新等需求。
针对上述需求,本文提出了一种设备智能运维业务应用的构建方案,可以基于智能运维平台高效地构建部署此类应用(见图4)。首先采集各类设备的原始数据,对其进行数据预处理和格式转换,处理后的数据通过编排好的规则进行数据转发,发送给时序数据库存储为历史数据,同时一部分数据会发送至消息中间件进行缓存。时序数据库会将大量历史数据汇聚给大数据分析引擎进行离线的故障诊断/预测模型训练,并将训练好的基准模型保存至工业应用模型库中。消息中间件的实时数据流会传输至大数据分析引擎进行模型的在线训练和优化,同时也会将一段时间内缓存的数据输入至实时计算组件Flink进行模型推理,其中用于推理的模型是由工业模型库在聚合、评估和优化多家企业模型后提供的当前最优模型。告警管理组件对模型推理结果进行分析判断,将维修建议和故障预警消息转发至企业的维修工单系统,由该系统向运维人员派发工单进行设备检查维护,最终将故障处理信息反馈至设备故障知识专家库,并将故障数据更新至时序数据库。该类应用可以按照上述方案,灵活调用各组件相关接口,最终构建成容器镜像部署在企业级工业边缘云管平台。
3 系统关键技术分析
AGV/移动机器人智能运维系统的关键技术在于使用智能运维模型进行实时推理,依据推理结果给出企业运维工作的相关意见,帮助企业快速定位设备故障,减少故障发生率。但是,在企业的实际生产环境中,模型的训练和优化总会存在一些问题:支撑模型训练的数据量不足或质量不高、收集的故障样本比例太少、设备类型较多导致各类模型训练开销大。针对这些实际问题,本文基于所提的系统架构,提出了两种智能运维模型优化方法。
3.1 基于迁移学习的设备故障模型预训练与优化方法
针对多类设备故障模型训练与更新开销大、部分设备缺少高质量训练数据的问题,本文提出基于迁移学习的设备故障模型预训练与优化方法(见图5)。
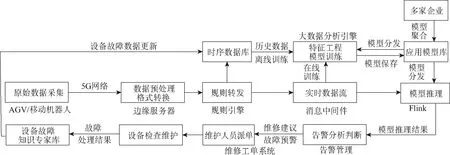
图4 设备智能运维业务应用构建方案
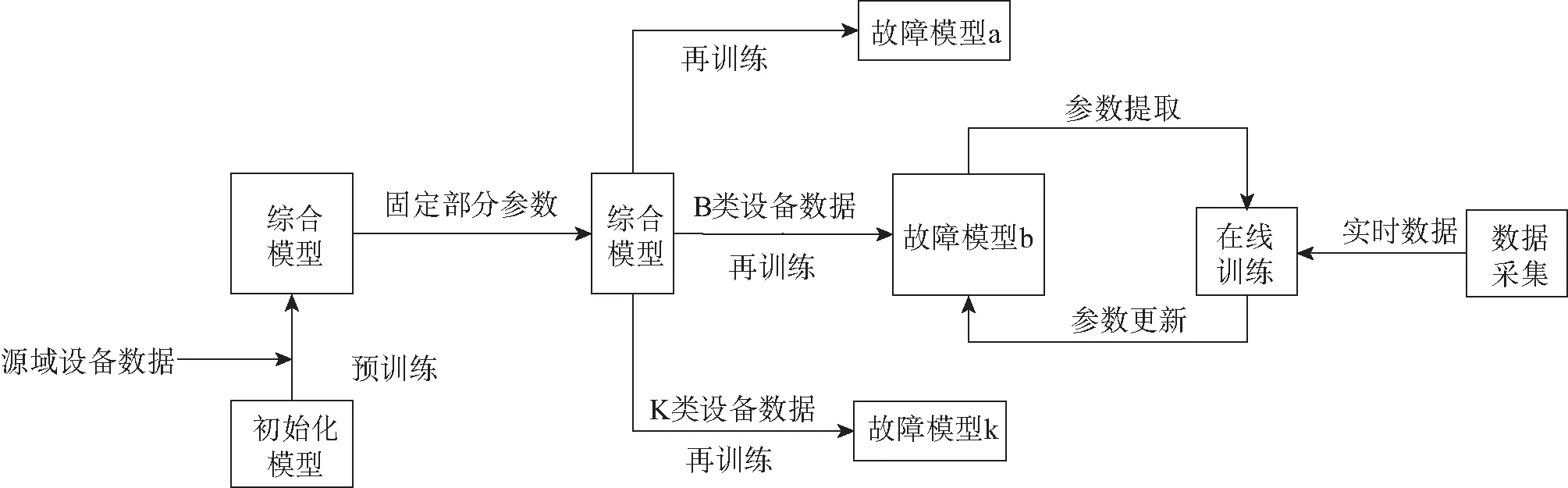
图5 基于迁移学习的设备故障模型预训练与优化方法
将迁移学习应用到模型构建中,即将源域Ds中源任务Ts知识迁移到目标域Dt中目标任务Tt中[9],用公式表示为
Ds=Xs,PXs,Ts=Ys,fs·
Dt=Xt,PXt,Tt=Yt,ft·
(1)
其中,Xs、Xt为源域、目标域特征空间,PXs、PXt为对应边缘概率分布,Ys、Yt为源任务、目标任务标签空间,fs·、ft·为对应预测函数。
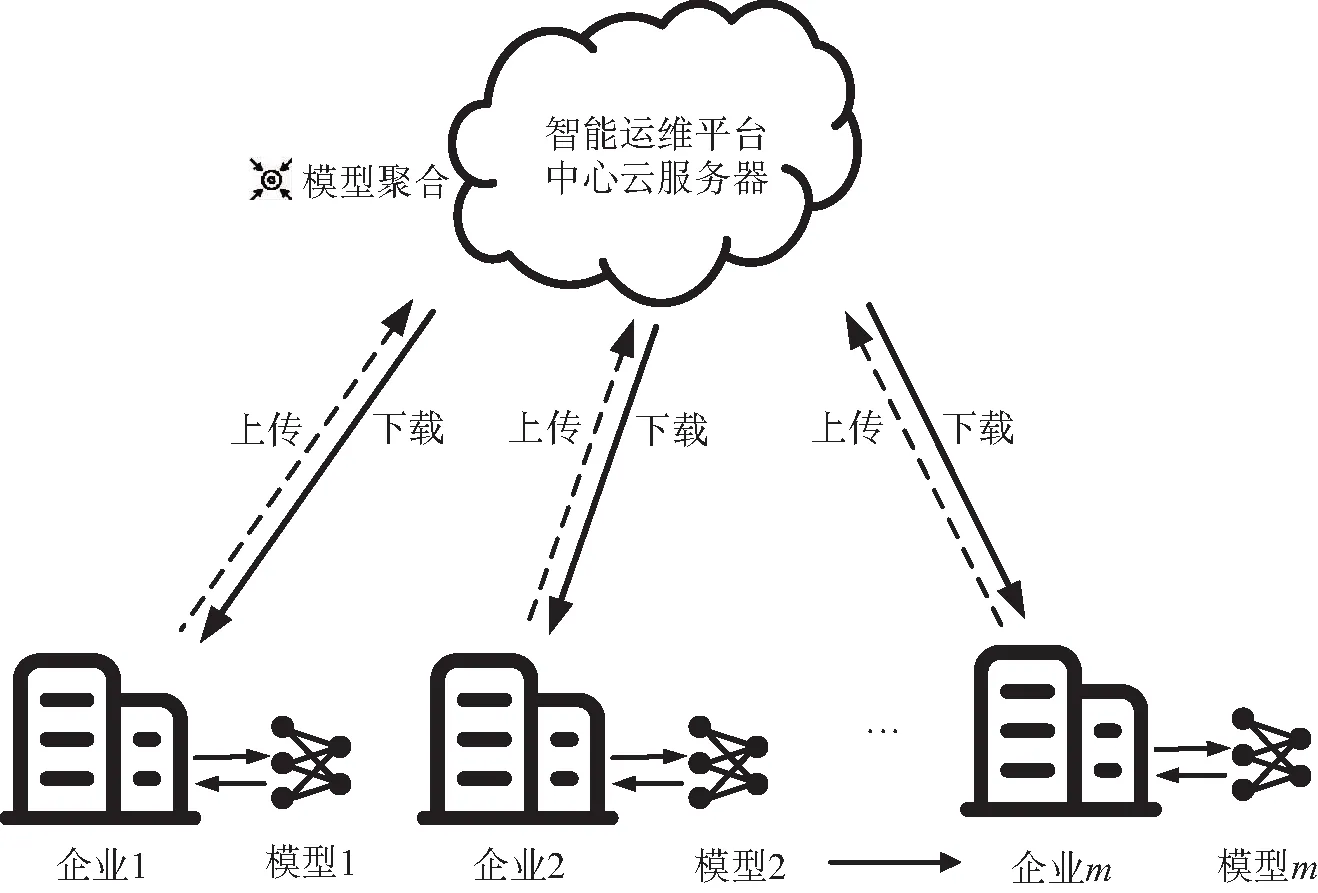
图6 基于横向联邦学习的故障模型聚合与优化方法
首先,选取质量较高的设备数据对模型预训练,固定部分参数后分别用各目标设备数据再训练,完成模型构建。该方法不仅可以节省开销,还能够提升目标设备模型性能。其次,周期性自动化地提取模型参数,利用实时数据不断在线更新模型,从而提高模型实时可用性并减少人为更新所耗费的资源。
根据上述方法,企业可以从系统时序数据库中筛选较高质量的历史数据进行初始模型的离线预训练,将训练好的模型结合其余相似类型的设备数据进一步训练优化,并利用系统采集的实时数据进行在线更新,更新优化后的模型都将定期保存至工业应用模型库中,以供系统的Flink组件调用模型进行实时推理。
3.2 基于横向联邦学习的设备故障模型聚合与优化方法
针对多方模型联合优化场景,考虑到同类型企业的设备数据特征相似,但样本数据不会重叠的情况[10],本文提出基于横向联邦学习的设备故障模型聚合与优化方法(见图6)。各企业参与方将从中心云服务器下载的全局模型在本地训练后,再上传至中心云服务器。中心云服务器对模型进行安全聚合,再将聚合后的模型发送给各参与企业。
中心云服务器的模型聚合目标函数如下。
(2)
其中,m是参与企业总数,n是数据量总和,nk是第k个参与企业的数据量,Fkw是第k个参与企业的本地目标函数。
根据上述方法,各企业参与方可以使用系统公共服务平台的联邦学习框架,在数据不出厂的前提下进行模型的安全聚合,同时利用公共服务平台的工业联盟链进行模型确权,最后使用联合优化好的模型进行本地实时推理。这样既可以在单个企业数据样本不足的情况下联合提升模型精度,又可以保护各家企业的数据隐私。
4 系统部署与应用
在某智能仓储设备制造领域的上市企业生产厂区内进行设备智能运维系统的部署、测试与应用,具体的实施场景如图7所示。该生产环境内具有托盘搬运AGV、三向叉车AGV、箱式四向穿梭车等12种AGV或移动搬运机器人设备,考虑到企业数据通信的低时延高可靠需求,将每类设备的Wi-Fi通信模块替换为工业5G模组,在厂房内各立体库顶部安装pRRU设备,并在室内部署其余相关5G网络设备,使整个生产环境基本都覆盖5G网络。本文选取了厂区内多个不同位置,使用测试软件对厂区通信环境进行了时延测试,发现Wi-Fi网络的上下行时延在4~111 ms内频繁抖动,并且终端设备的快速移动会导致时延增大;而5G网络的上下行时延可以稳定在5~23 ms范围内,时延抖动相对Wi-Fi网络明显较小,平均时延更低,并且在终端快速移动的情况下时延也未产生明显抖动。由此可见,5G网络的部署解决了原有Wi-Fi通信方式时延高和不稳定的问题。
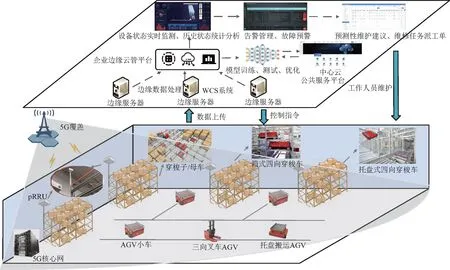
图7 系统部署实施场景示意图
由于厂区内每个区域的穿梭车或AGV小车均由独立的仓储控制系统(Warehouse Control System,WCS)进行管理,缺少统一的设备监控运维中心,故在企业私有云服务器部署了工业互联网企业边缘云管平台,汇聚了各类设备的运维监测数据(电机转速/电流、行走里程、伸叉次数、换向次数、告警信息等30多类特征维度)。
基于企业边缘云管平台,可实现各类设备实时的运行状态监测,基于历史状态数据的设备效能统计分析和故障告警通知,并通过平台内的工业私有区块链可实现重要运维日志的可信存证与追溯审计,不断积累故障运维模式和数据,丰富设备故障知识专家库。同时,利用大数据分析引擎进行设备故障模型的离线训练,其中针对重型托盘式四向穿梭车的数据集训练分为对照组和迁移组两种方式,对照组只使用重型四向车数据单独训练故障模型,而迁移组先使用轻型四向车数据进行模型的预训练,再将预训练后的模型用于重型四向车的模型训练。图8所示为轻/重型四向穿梭车设备运行故障预测模型(预测未来10 min内是否发生故障)的训练与测试结果。从结果上看,对轻型箱式穿梭车的数据集单独训练并交叉验证,可以达到较低虚警率下82%的故障预测正确率;使用本文所提基于迁移学习的方法进行重型托盘式穿梭车(可用真实数据集较少)的模型优化,相对于不使用迁移学习的训练方式可以提升23%的故障预测正确率。考虑到该企业的多家客户方均有同类型设备,故可以利用中心云服务平台的联邦学习框架在保障客户数据隐私的情况下进行故障预测模型的再优化,提升模型精度。根据故障预测模型的推理结果,系统能够及时发现设备运行异常情况,并向企业给出相应的预测性维护建议,有效减少了由于设备非计划故障停机造成生产效率降低的情况,从而实现了企业工业生产的降本增效。
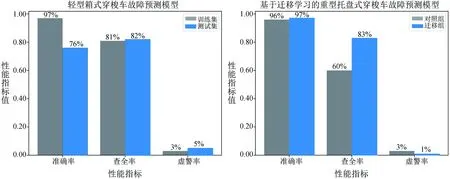
图8 轻/重型四向穿梭车设备故障预测模型的训练与测试结果
5 结束语
本文提出了基于5G+工业互联网的AGV/移动机器人智能运维系统设计方案,并在企业实际生产环境中进行了系统的部署、测试与应用,实现了高可靠、低时延的设备数据采集,设备运行状态实时监测,设备告警信息及时通知,设备关键运维日志的可信存储和设备预测性维护建议提示。同时,真实数据集的测试结果验证了本文所提智能运维模型优化方法的有效性与可行性。但是,要提升各类型设备的故障预测准确性,还需要联合多家企业进一步训练和优化模型,并进行模型的实际效果测试与推理应用。