便携式异步电动机PLC调速控制实训装置的研制
2022-11-09李嘉豪
李嘉豪
(西安科技大学,电气与控制工程学院, 陕西,西安 710054)
0 引言
“电气控制与PLC应用技术”是电气工程及其自动化专业的主干课程,同时也是一门实践性很强的课程。由于传统的PLC实训平台体积庞大,有一定的局限性,学生只能在实验室进行课程实践和实验环节。因此,为进一步提高本课程的教学效果,急需研制方便学生使用的实训装置,学生可将该实训装置带至图书馆、家里等场所进行实践练习,适合实施以学生为主导的探索式学习。在课程实践中需要学生自主设计整个实验过程,完成硬件组合连接和软件程序设计。通过实践能够使学生掌握常规低压电器的工作原理,提高学生运用PLC的实操能力,加深对理论知识的理解。实训装置以三相异步电动机为被控对象,建立触摸屏和PLC之间的通信,通过触摸屏设计人机交互界面,实现对异步电动机转速的调整[1-3]。
1 方案设计
“电气控制与PLC应用技术”课程中异步电动机变速调节和PID调节是2个比较典型的实验。新研制的实训装置应该具有异步电动机变速调节和PID调节2个实验功能。总体结构采用西门子S7-200 SMART为主控制器,由触摸屏设定电动机运行频率,通过以太网通信将数据传送至PLC,经D/A转换子程序处理后送至模拟量输出模块,再由模拟量输出模块将数据传送至变频器,从而完成频率给定,实现电动机速度调节;采用增量式旋转编码器对电动机速度进行采集,并将速度反馈给PLC实现速度闭环调节;利用触摸屏设计人机交互界面,与PLC进行通信,由上位机对电动机的运行频率进行设定并实时监测电动机转速[4],其设计结构框图如图1所示。同时,为了方便学生使用,新研制的实训装置采用便携式结构设计,将所有器件合理安装在手提箱里,并配备漏电保护、过载和短路保护,保障人身安全和设备使用安全,具有灵活、可靠、安全等特点。
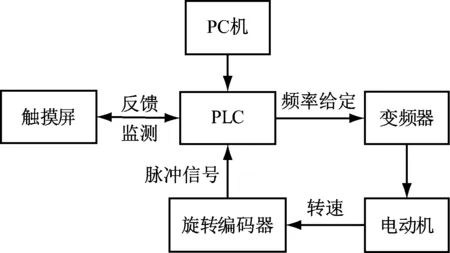
图1 实训装置结构图
2 实训装置硬件设计
2.1 硬件选型
根据实训任务要求,PLC共需数字量4路输入/2路输出、1路模拟量输出,本实训装置选择西门子S7-200 SMART PLC,CPU ST20模块+EM AE03模拟量转换模块;变频器采用VFD-M变频器,实现电动机正转、反转、变频调速控制;增量式旋转编码器选择HN3806-AB-400N,每圈输出400个脉冲,该编码器体积小、精度高;触摸屏选用Samkoon,操作简便、可视性好、可维护性强,可以用来显示电机转速、参数设定、监控PLC运行状态等。
S7-200 SMART PLC工作电源为直流24 V,故选择AC 220 V转DC 24 V开关电源供电,该电源安全、可靠;主回路电源通过空气开关接入实训装置,对电路或电气设备短路、严重过载及欠电压等进行保护;交流接触器的主触头可以通过大电流,故选择交流接触器作为异步电动机的控制器件;但交流接触器不具有过电流保护功能,需配备热继电器使用以实现电动机的过载保护,其体积小、结构简单,灵敏度高。装置硬件选型如表1所示。

表1 装置硬件选型
2.2 硬件电路设计
实训装置硬件接线原理图如图2所示,对其中的主要部分进行说明如下。
2.2.1 PLC
S7-200 SMART PLC采用24 V直流电源供电,L+、1M接+24 V,M接0 V;I/O地址分配如表2所示。旋转编码器增量脉冲由I0.0、I0.1输入,I0.2、I0.3分别接电动机正转、反转控制按钮,Q0.0、Q0.1控制中间继电器KA1、KA2线圈得电来控制变频器正、反转输入端子M0、M1。

表2 I/O地址分配表
2.2.2 旋转编码器
连接旋转编码器与PLC之前,第一步先选择PLC的高速计数器外部输入信号和工作模式。根据PLC的输入点确定高速计数HSC0,旋转编码器为AB正交相输出,工作模式为10模式。旋转编码器的电源、0 V端口分别接至PLC的L+和M端口,编码器的脉冲输出OUTA、OUTB接至PLC的I0.0和I0.1端口。
2.2.3 变频器
隔离开关QS控制变频器的工作电源,中间继电器KA1、KA2的常开触点分别接变频器数字量输入端M0、M1控制异步电动机正转、反转,PLC的EM AM03模拟量输出端0、0M分别接变频器模拟量输入控制端口AVI、GND,变频器的U、V、W三相输出经交流接触器的主触点接三相异步电动机。
2.2.4 控制回路
控制回路中,首先接热继电器的常闭触点,实现电动机的过载保护;SB1为停止按钮,接常闭触点;SB2为启动按钮,接常开触点;交流接触器的常开辅助触点与SB2并联,实现互锁;最后串联交流接触器的线圈,完成控制回路的设计。
3 软件设计
系统的软件设计语言使用梯形图,需配备西门子S7-200 SMART编译软件(STEP 7 MicroWIN SMART V2.4)。该编译软件有先进的程序结构、灵活方便的寻址方法、强大的通信功能、简化复杂任务的向导和库、PID参数自整定功能等。学生根据控制要求,编写梯形图程序,实现相应的功能。
3.1 主程序设计
在主程序设计中需要先对PLC内部寄存器进行初始化,初始化完成后将触摸屏给定的频率转换为0~27 648的数字量,再对该数字量进行D/A转换,转换为0~10 V的电压信号;变频器接收电压信号并输出相应的频率使电动机运转;利用增量式旋转编码器采集脉冲量并调用高速计数器子程序计算电动机转速;得到电动机转速调用PID子程序,经PID算法修改D/A模块输出值,判断实际转速是否与目标转速相等,若相等则结束主程序,若不等则返回PID子程序,经算法修改D/A模块输出值,构成一个完整的闭环控制系统[5-8]。主程序流程图如图3所示。

图2 实训装置硬件接线原理图

图3 主程序流程图
3.2 子程序设计
在子程序设计中,首先对高速计数器进行初始化;然后启动定时中断进入中断子程序。在中断子程序中记录100 ms内高速计数器的脉冲数并计算电动机的转速;算出电动机转速后中断返回并进入PID子程序,获取转速差并通过PID算法计算转速增量,根据增量修改D/A模块值,通过比较实际转速与目标转速是否相等来决定D/A模块的输出;若相等,则D/A模块输出值保持不变,并进一步判断转速是否稳定,若不稳定,返回修改PID参数。子程序流程图如图4所示。

图4 子程序流程图
4 实验调试与分析
学生通过新研制的实训装置需要自行完成硬件电路的搭建、变频器参数设定、触摸屏画面设计、软件编程、PID参数整定等来实现异步电动机变速调节和PID调节2个实验。
4.1 硬件搭建
参考硬件接线原理图完成实训装置硬件的搭建,实物如图5所示,各元器件布局合理、符合规范。变频器安装在左上角,与PLC保持一定的距离,减小PLC在变频器使用过程中产生电磁场的干扰;PLC安装在导轨上,确保安全稳固;触摸屏安装在箱盖上,可操作性强。通过硬件的搭建,学生可掌握常规低压电器的工作原理及使用。

图5 硬件实物图
4.2 变频器参数设定
首先需对变频器参数进行设置,按变频器控制面板“MODE”按钮,显示P00(主频率输入来源设定);按变频器控制面板“ENTER”按钮,显示“00”(查找手册设置主频率的来源)。本实验中设定为“01”(主频率输入由模拟信号0~10 V输入),按“ENTER”按钮,再次进入“P00”;按上、下选择按钮,显示P01(运行信号来源设定);按“ENTER”按钮,显示“00”(查找手册运行信号的来源)。本实验中设定为“00”(通过上、下按钮改变参数),按“ENTER”按钮(表示确定,参数设置成功);按“MODE”按钮,直至回到频率界面。通过变频器参数的设定,学生可掌握变频器的调试及使用方法。
4.3 触摸屏设计
创建一个新的项目,选择菜单栏下的网络,双击SIEMENS网络设定通信协议,制造商选择SIEMENS,系列选择对应的S7-200 SMART,IP地址要与PLC的IP地址相同,否则通信不成功。设置完成后在主界面根据实验要求设计监控界面,触摸屏控制界面如图6所示。通过该过程,学生可掌握人机交互界面的设计、触摸屏和PLC的通信,为设计更复杂的自动化控制系统打下基础。

图6 触摸屏控制界面
4.4 实验测试及分析
异步电动机变速调节实验中,通过触摸屏设定异步电动机的不同运行频率,观察电动机的实际转速变化,测试结果如表3所示。通过该过程,学生可进一步加深对PLC模拟量控制的理解。

表3 改变频率值测试结果
PID调节实验中,需要对PID参数KP、KI、KD进行调节,使电动机能够稳定在目标转速周围,具体调节过程:初始设定KP为较大的值,KI、KD设置为0,观察速度变化情况,当出现振荡时,记录此时的系数值;接下来调节KI,设定一个初始值,当摆动在目标值附近单一轮回且恢复慢时,适当减小KI,当摆动在目标位置多次来回波动,加大KI;最后设置KD,偏离目标值大且恢复慢,加大KD,单位时间内偏离目标角度误差不大,但振荡频繁,则减小KD。PID调试测试结果如表4所示。

表4 PID调节测试结果
实验过程总结:通过硬件电路搭建、变频器参数设定、触摸屏设计、PID参数整定等具体的实验过程,学生可掌握常规低压电器的工作原理、变频器的使用、人机交互界面的设计、PLC模拟量控制、PID参数调试及自动化控制系统的构成。
5 总结
本实训装置将触摸屏、PLC、变频器、编码器和三相异步电动机组建成一套完整的电动机调速系统。学生通过本实训装置可完成异步电动机的变速调节和PID调节2个实验,进一步加深对PLC控制技术的理解,并能够更深层次地掌握PID控制的相关理论和调试方法;同时采用便携式结构设计,方便学生自行学习和实训,为理论教学与实践教学相结合提供了很好的支撑。
