欧姆龙视觉系统与ABB工业机器人通信的实现
2022-11-07庞智张廷婷曾令培
庞智 张廷婷 曾令培
(1.成都农业科技职业学院,四川成都 611130;2.四川水利职业技术学院,四川成都 611200)
0 引言
在现代生产过程中常常采用视觉系统进行产品测量和识别,再将结果通过通信传输给工业机器人进行作业,在这个过程中通信的设置非常重要[1]。本文对欧姆龙FH-L550视觉系统与ABB工业机器人的通信实现过程进行了分析,主要任务是使视觉系统为ABB工业机器人提供数据的检测结果,工业机器人根据数据结果进行相关作业。本文主要讨论了视觉系统通信传输实现的整个流程。
1 视觉软件中基于以太网的通信设置
欧姆龙FH-L550视觉系统控制器的主要通信方式有以下5种[2],分别是:并行通信、PLC LINK通信、Ethernet通信、EtherCAT通信、无协议通信。这5种通信方式在通信过程中各有特点,在现代设备中,以Ethernet通信(以太网通信)最为常见,故本文以以太网通信方式为例进行分析讲解。
首先在主界面中选择“工具”选项,选中“系统设置”菜单(图1),在进入“系统设置”菜单后,单击“启动设定”选项,选择“通信模块”选项卡(图2),完成以上设置后返回主界面保存设置(图3)。最后选择功能菜单进行系统重启设置,等待系统完成重启再进行下一步操作。

图1 工具下拉菜单
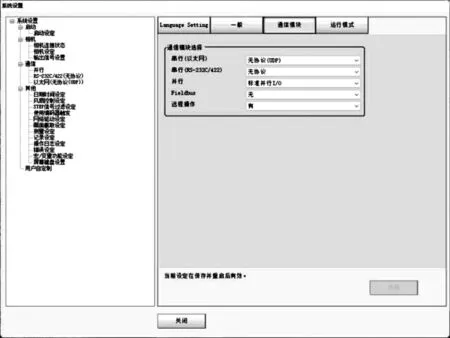
图2 通信模块参数设置

图3 保存通信设置
系统重启完成以后重新点击“系统设置”菜单,选中“以太网(无协议(UDP))”选项(图4),在这个选项中会有IP地址以及端口等参数设置。这里需要注意的是两个IP地址参数,需要填写“地址设定2”中的参数,需要填入的信息有视觉控制器的IP地址、子网掩码、默认网关和DNS服务器等。

图4 以太网参数设置
在菜单最下方“输入/出设定”的端口号设置中,设置与传感器控制器进行数据输入的端口号,注意该端口号应该与主机侧相同,最后完成设置以及相应的数据保存工作。
2 ABB工业机器人通信设置
首先要对ABB工业机器人配置WAN口IP地址[3]。在示教器中选中控制面板,然后选中配置,接下来在主题中选中communication,点击IPseting,设置好IP信息后点击“更改”保存IP信息。
下一步使用SocketCreate机器人指令创建一个使用流型协议TCP/IP的新套接字,并分配到相应变量(图5)。紧接着使用SocketConnect指令将套接字与远程计算机进行连接。通信连接完成以后需要发送及接收视觉系统的信息。发送信息采用SocketSend指令向远程计算机发送数据指令。当经过视觉系统采集信息和判断后,工业机器人系统将接收来自远程计算机的数据,接收数据采用SocketReceive指令来完成,该指令在接收数据的同时把数据存储到相应的字符串变量中。在接收的数据信息中需要提取有用信息,这就需要StrPart寻找指定字符位置指令,从字符串中提取指定位置的数据,并将结果赋值给新的字符串变量。最后,当不使用套接字连接时,使用SocketClose来关闭。

图5 ABB工业机器人指令实例
3 结语
如今,在包装、搬运等的工作场景中,视觉系统负责采集搬运包装物品的关键信息[4],该关键信息通过以太网等通信协议传输给工业机器人,工业机器人接收到相关信息后通过程序控制对相关物品进行对应处理,该系统对提升作业的精准度及效率有很好的帮助。本文中采用欧姆龙视觉系统为ABB工业机器人提供检测结果,机器人作为主站通过以太网对欧姆龙视觉检测模块进行控制和数据采集。根据本文所述进行通信设置后,欧姆龙视觉系统与ABB工业机器人成功建立了通信联系,并取得了较好的实际应用效果。
