基于神经网络的室内单站精确被动定位技术研究
2022-11-06张倩倩尹成友李安琪
张倩倩 尹成友 李安琪
(国防科技大学电子对抗学院,合肥 230037)
引 言
随着社会科技进步的不断发展,位置服务在人们生活中已经不可或缺.当前,室外定位的技术已趋于成熟,利用北斗系统、全球定位系统等就能够基本满足人们户外活动的需求.室内定位是近年来的研究热点,由于室内环境的复杂性以及多径效应的影响,信号的传输会受到一定的影响.复杂的传输信道会对信号造成反射、散射以及折射等,很多室外定位方法在室内环境下的定位效果并不理想.
室内定位系统可以分为两大类:一是传统的定位方法,不利用复杂多信道信息,依靠测量到达时间、到达时差、往返时间和到达角等参数来估算目标位置;二是利用复杂多信道信息的定位方法,将每个位置用唯一的信道指纹表示,室内定位系统从测量参数中提取特征,通过对多信道传递特征的分析,从而实现对目标的定位.
超宽带(ultra wide-band,UWB)系统具有提供高精度定位的能力,Segura 等人[1]提出了一种新型的UWB 室内定位系统,综合信号到达时间和测距估计方法,95%的位置测量结果误差在20 cm 以下,能够实现在室内环境下对移动机器人的精确定位,但在非视距环境下准确度不够.文献[2]针对这种问题,基于朴素贝叶斯原理,对两种场景进行精确识别,从而提高了非视距环境下的整体定位精度.但现实生活中,由于室内环境的复杂性,如目标的移动、信号衰减和多径传播等,UWB 定位技术仍面临着重大挑战.
在复杂场景下,传统定位方法往往受限于室内多径效应,难以从接收信号中提取目标位置的有效信息,而基于复杂多信道信息的定位方法,通过合理利用这些信息,可以提升定位效果,实现对目标的精确定位.
时间反演[3-4]是一种典型的利用复杂信道信息的定位方法.Hoefer 等人[3]通过数值实验,利用时间反演腔模型和时空离散传输线矩阵方法,重建空间中多个脉冲源,实现了对目标的超分辨定位.文献[4]通过在目标辐射源近场放置散射介质薄片,当时间反演与散射介质相结合时,能够提高对目标辐射源的定位精度,以网格分辨率重建脉冲点源的位置和幅度.时间反演方法定位精度较高,但主要用于目标对外辐射信号的情况,是对辐射源自身的定位.
利用接收信号强度(received signal strength,RSS)和信道状态信息(channel state information,CSI)的指纹定位技术是另一种典型的利用信道信息的定位方法.刘召伟等人[5]依据差分-距离损耗模型,利用RSS 估计距离,由已知距离下的差分接收功率值拟合得到模型参数,用最大似然法估计用户位置.李若南等人[6]为了降低室内复杂信道对接收信号强度的干扰影响,提出通过注意力机制捕获RSS 序列与区域位置粗细粒度特征的映射关系,进而获取区域位置信息,实现了不同大小网格采集下对目标的高精度定位.但RSS 是粗粒度信息,常常受到多径效应及噪声信号的影响,因此CSI 指纹定位技术更受青睐.Kaishun Wu 等人[7–9]通过研究正交频分复用(orthogonal frequency division multiplexing,OFDM)系统中子载波的频率分集,提出了一种利用CSI 在接收机上建立传播模型和指纹识别系统的方法[9],利用OFDM中的信道状态信息建立传播模型,将其与频率分集结合、多天线与空间分集结合用于室内位置指纹识别.在几个典型室内环境下开展实验,能够明显提高定位精度.在此之后,Wang 等人利用深度学习的方法,分别提出了Phase-Fi[10]和Deep-Fi[11]两种定位系统.Phase-Fi 系统提取CSI 相位信息,利用网络权值表示位置指纹,在实际室内环境中实验,能够实现客厅1.03 m 和实验室1.98 m 的平均定位精度. Deep-Fi 系统也能在不同实验情况下实现米级定位精度.文献[12]提出一种基于卷积神经网络(convolutional neural network,CNN)的定位方法,该方法利用不同信道的CSI 振幅和相位差构造位置指纹,与Phase-Fi 系统相比,定位精度提高了57.64%.但基于CSI 定位的前提条件是该区域无线基础设施较为完善,能够实现Wi-Fi 信号的全覆盖,但在部分场景中难以具备这样的条件,难以实现对目标的精确定位.
在上述的定位方法中,主动定位方法通常需要在空间中布设多个接收传感器,一般用于目标自身对外辐射信号的情况,难以实现单发单收情况下对目标的定位.而在被动定位情况下,对目标的定位精度通常只能达到米级,无法实现超分辨定位.因此,如何在室内复杂电波传播环境下,利用单接收站实现对目标的超分辨被动定位,仍然有很多问题亟待解决.
本文基于多径复杂信道的室内定位理论,将复杂室内环境视为二维的时间反演腔模型,利用不规则的墙壁增强目标与复杂场景中的障碍物的相互作用,进一步增强多径效应,从而接收的电磁波中也包含了更加丰富的目标信息,最终能够实现复杂室内环境下对目标的单站精确定位,为室内定位提供了一种新的方法.
1 基于多径复杂信道的室内定位原理
假设我们考虑图1 所示的室内定位问题.有一个辐射源位于A(rt)点,有一个接收传感器位于B(rr)点,有一个目标位于C(r0)点.A点辐射源辐射的信号在室内空间传播,照射到C点目标,产生散射信号,该信号经过多径传输到达B点接收点.现在的目的是利用B点的单站接收信号对C点目标进行定位.

图1 室内环境示意图Fig.1 Schematic diagram of indoor environment
辐射源辐射的信号记为st(t,rt),经过多径传播到达目标点的照射信号为
式中:*表示卷积运算;M表示室内复杂环境下有M条信号传播路径;ai为第i条信道接收信号的幅度;τi为第i条信道的时延.电磁波在近场传播过程中,包含物体、墙壁之间的相互作用,是一个非线性过程,所以我们这里用一个信道传递函数(r0,rt)来表达,其中包含了目标位置信息.式(1)中第二行将传输信道近似为一线性多径信道,第一项表示在视距情况下接收点接收到的直达波信号,第二项表示经过各种反射、散射的多径信号的叠加.
式(1)中的照射信号与目标作用后产生散射信号,经过多径传输信道到达接收传感器后的表达式为
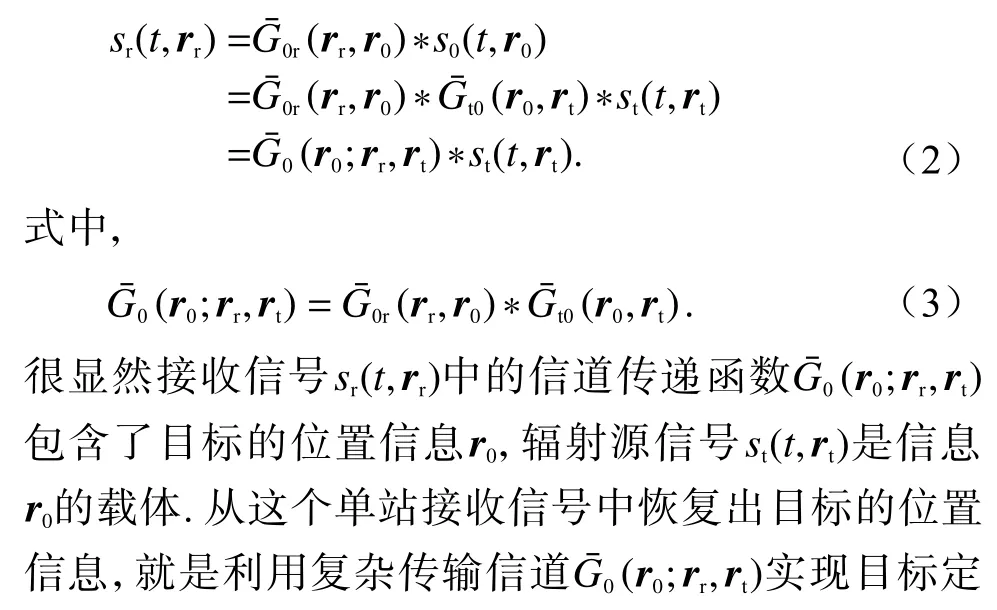

图2 是在室内二维情况下,利用电磁仿真软件计算产生的2PSK 发射信号和两个不同位置目标的接收信号的波形图.
图2 发射信号和接收信号示意图Fig.2 Schematic diagram of transmitted and received signals
图2(a)为发射的2PSK 信号,图2(b)和(c)为目标位于不同位置点的接收信号.从图2(b)、(c)可以看出,由于复杂传播信道的作用,不同位置目标经过两次复杂信道的传输,在接收点的信号包含了丰富的多径信息.我们利用发射信号与接收信号卷积来近似观察复杂信道特征,得到图2(d)和(e),这些信号的起伏特征可为不同位置目标定位提供重要信息.
从信息角度来考虑,由于复杂室内环境中的多径效应,接收信号包含更多的目标位置信息.由于不规则墙壁的存在,信号传播过程中会出现多次反射、散射的现象,在这一过程中,一方面由于复杂传播信道中格林函数的贡献,另一方面由于目标与障碍物间的复杂相互作用,包含的倏逝波信息转移到传输波,从而接收点的接收信号中会包含携带目标位置精细的细节信息.利用这些信息,就能够实现对目标的精确定位,甚至超分辨定位.
接收信号中信道传递函数(r0;rr,rt)中包含目标位置信息,当室内环境确知,辐射源位置rt和接收传感器位置rr也确知的情况下,它包含目标位置信息r0,辐射信号是其作用对象.对于常规的Wi-Fi 类信号,其载频f0已知,调制样式ms已知.问题是如何利用这些已知信息对r0实现最优估计?

从式(4)可见,r0与接收信号之间是一个复杂的非线性函数关系,要写出这样的表达式非常困难,如何求解式(4),我们自然想到机器学习的方法.
2 基于深度学习的定位算法实现
神经网络的通用近似定理告诉我们,深度学习神经网络可以逼近到任何一个连续有界非线性函数.因此,我们可以通过神经网络学习的方法解决式(4)的问题.
本文根据电磁仿真的训练数据集,合理设计深度学习CNN 结构,将定位问题转化为回归模型的问题.通过数据采集、特征提取和模型训练,建立信道指纹与位置之间的非线性关系来完成被动定位.
2.1 数据集的产生
考虑图3 所示的二维典型的三居室房间布局情况下的定位问题.其中,Nx、Ny是每个房间对应剖分的网格数,在本文设定的场景下,Nx、Ny是常数.为了模拟整个空间电磁波的传播,我们在房间墙壁外设置了一个完全匹配层(uniaxial perfect lymatched layer,UPML).
对场景参数进行设置.室内环境是二维典型的三居室房间布局,如图3 所示,包括两个房间和一个走廊.A 区为实验室,长8 m,宽6 m;B 区为走廊,长4 m,宽1.4 m;C 区为办公室,长6 m,宽4 m.根据稳定性条件,设置网格剖分大小为 Δx=Δy=0.2 m,因此三个场景分别占据30×40、7×20 和20×30 个网格,共1 558 个网格点.组合场景由不规则混凝土墙壁包围,墙壁的电导率和相对介电常数分别为 σ=0.06和εr=6.4,墙壁厚度一般为24 cm,因此设置墙壁占据一层网格.墙壁外部区域填充的是空气,最外围由UPML 包围,作为电磁仿真的吸收边界.

图3 房间模型参数设置Fig.3 Parameter settings for the room model
在神经网络训练过程中,训练数据对于神经网络的训练至关重要,也直接影响了训练生成的网络对于处理新数据的准确性.本文利用MATLAB 进行编程,产生发射信号,利用时域有限差分(finitedifference time-domain,FDTD)法仿真出辐射源发射信号到接收点进行采集的传播过程.设置目标位于室内不同位置,辐射源辐射利用随机产生的m序列调制的2PSK 信号,同时接收点记录目标位置和采集接收数据,形成训练数据集.
2.1.1 辐射信号设置
对于接收站持续采集的信号,我们需要保证在输入层输入的训练数据中含有包含目标位置的有效信息,即保证输入的训练数据中应尽可能多地包含发射信号经过目标反射后的散射回波以及经过多次反射、散射后的多径信号,使得位于远场的接收站能够接收更多的目标位置相关信息.
本文采用的辐射信号是目前数据通信中常用的2PSK 调制信号,为了满足传输数据的随机性,这里采用m序列产生调制数据,以尽可能地考虑定位系统对数据通信的内容没有任何限制和要求.
PSK 信号是一种常用信号,使用二进制的基带信号来控制载波的相位,使载波的相位能够反映出数字消息的特征,表达式如下:

式中:a表示脉冲幅度;TB为矩形脉冲的持续时间;fc为载波信号的频率.基带信号(t)与高频载波相乘,使得数字基带信号能够控制高频载波的相位.
2.1.2 基于FDTD 的数据集获取
FDTD 以差分原理为基础,从麦克斯韦方程出发,直接将其转化为差分方程,能够在离散数值时空中仿真再现电磁波传播的物理过程.其二维TM 波的差分方程迭代公式为:
式中,CA(m),CB(m),CP(m),CQ(m)是与媒质参数和时间、空间网格大小有关的参数[13].
辐射信号用线电流源J模拟,由式(8)中引入进行激励和辐射.
待定位目标假设是一个正方形的金属散射体,占据3×3 个网格.在产生不同数据集样本的过程中,将目标沿着室内场景的剖分网格按序移动,记录其处于不同位置时对应的接收信号.在定位过程中,默认目标中心点坐标 (x,y)代表整个目标的位置,目标所占据网格的大小及整体位置坐标为

为保证离散后差分方程组的解是收敛和稳定的,离散麦克斯韦方程的稳定性和收敛性对时间和空间离散间隔有一定的限制.依据Courant 稳定性条件以及数值色散对空间离散间隔的要求,对空间离散 Δx、Δy,时间离散 Δt做出如下规定:

式中,λ表示信号的最小波长.
经过FDTD 迭代适当步数达到稳态后,记录接收点场强数据作为我们的训练输入数据,记录目标点位置作为输出标签数据.
利用FDTD 算法对图3 所示室内场景结构进行仿真,得到的室内场强分布如图4 所示.
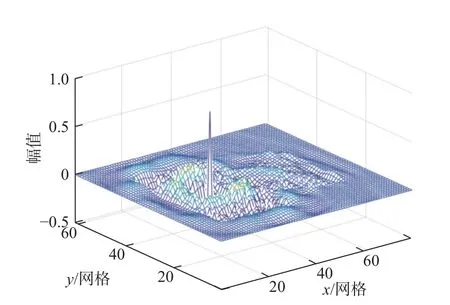
图4 室内场强分布Fig.4 Distribution of indoor electrical field
由于室内的多径反射,传递函数的复杂性,场强的空间分布信息非常丰富.
2.2 定位算法神经网络的结构设计
依据信号的物理特征构建有效的神经网络结构对算法至关重要.从多径信号中提取目标位置信息,需要充分考虑多径信号的时序特征,循环神经网络是一个不错的选择,但循环神经网络计算非常耗时,效果并不理想.
针对时序数据的这一特性,本文提出采用CNN来实现,利用卷积处理局部序列的前后关联性和特征提取,将看似杂乱无章的接收信号转换为蕴含信道传递规律的卷积结果.2PSK 信号经过多径传输,由图2 可以看出卷积是提取多径信息的有效方法,但由于发射信号调制数据并非已知,而我们知道发射信号序列是由0、1 构成,也可以理解成由00、01、10、11 序列构成,进一步理解由000-111 构成.考虑到0、1 没有码元的过渡信息,000-111 八个卷积核对接收数据长度有一定要求,本文采用00、01、10、11 序列构成四个一维卷积核,实现对包含目标位置信息的信道特征进行提取.图5 为图3 场景下某一位置目标产生的接收信号与四个卷积核卷积后得到的结果.


图5 接收信号与不同卷积核的卷积结果Fig.5 Convolution results of received signals with different convolution kernels
由图5 可以看到,不同的卷积核卷积结果呈现不同的规律性.从物理意义上讲,卷积结果体现了目标经过墙壁、目标反射散射后的时延变化特征,从而将时序信号中的时延信息转换为体现空间分布情况的位置信息,然后利用全连接层,捕获不同位置点的精细位置特征,最终实现室内精确定位.
CNN 结构如图6 所示,神经网络主要由两部分构成:CNN 层、全连接层.

图6 CNN 结构Fig.6 Structure of CNN
输入层为接收传感器接收到的一段N维时间序列x=[x1,x2,···,xN],在输入数据维数的选取上,为了使其充分含有信号传播过程中的空间多径信息,我们选取N=1 000,包含十个码元长度和四十个载波周期.
在自定义卷积核的过程中,为了与发射的2PSK信号保持一致,卷积核中包含0 和1 两种码元信息,考虑到调制码元含有信息及码元长度的不同,决定CNN 层采用四个1×200 的卷积核.由于不同卷积核的卷积结果对应着不同的物理意义,需要充分保留卷积结果,因此将池化层大小设为1,不对卷积结果做出舍弃.
全连接层设计为两层隐藏层,由于要解决的是室内定位问题,目标的位置坐标变化限制在一定范围内,因此两个隐层的激活函数分别设为ReLU 和Sigmoid;神经元个数分别设为1 024 和512;最终的输出层结果y对应着目标所处位置的横纵坐标,是一个回归问题;输出层采用线性激励函数.
CNN 选用均方误差(mean square error,MSE)作为代价函数,表达式为

式中:N为小批量样本的样本数量;yˆ(x)和y(x)分别为对目标的预测坐标及标签坐标.
综上所述,得到图7 所示的训练流程图.

图7 CNN 训练流程Fig.7 The process of CNN training
3 实验结果及分析
在实验中,本文利用FDTD 方法产生神经网络需要的训练数据集和测试数据集,设置入射波为二维TM 波.针对不同情况,分别讨论接收传感器固定在室内和室外、室内环境存在噪声、目标大小发生变化的定位情况.
3.1 实验一
本节讨论辐射源位于室内固定位置(25,30),接收传感器位于室内固定位置(58,38)时,利用神经网络对室内目标的定位情况.
在数据集采集过程中,目标位于空间位置(x,y)处,辐射源持续发射信号,辐射信号采用m序列调制的2PSK 信号,载波设置为100 MHz.接收传感器对信号进行接收.假设接收信号长度为Nt,神经网络输入维度N=1 000,记K=■Nt/N」,即目标每一处位置标签(x,y)对应着接收信号的K组数据集.
我们将CNN 与普通全连接层神经网络进行对比,观察二者的定位效果.为了减少计算量,本文设置训练小批量样本大小为256,训练轮数为100,学习率为0.008,优化器为Adam.
在定位耗费时间方面,主要对网络的训练耗时比较多,且与笔记本性能关系较大,笔记本型号是ThinkPad T14s,CPU 为AMD 锐龙7 PRO 4850U,集成显卡.
目前数据集大小是312 620×1 000,1 000 为输入长度,312 620 为数据组数.其中90%作为训练集,10%作为测试集.利用CNN 训练一轮的时间为3 min 左右,通常训练二十几轮网络能够基本收敛,可以根据所需要的定位精度确定训练轮数.在网络训练结束后,我们对测试集内所有点进行定位,经过计时,三万多组数据的测试集定位大概需要1 min.
设计对比试验中的普通全连接层神经网络,记为FC Net,其中含两层隐藏层,第一层隐藏层1 200 个神经元,激活函数为ReLU;第二层隐藏层512 个神经元,激活函数为Sigmoid;其余参数设定同CNN.
表1 为两种不同神经网络测试结果.

表1 两种神经网络的测试结果Tab.1 Results of the two neural networks
图8 为不同情况下的训练和测试MSE 曲线.

图8 训练和测试MSE 曲线(室内单接收站)Fig.8 Training and test MSE curves(indoor single receiving station)
从实验结果能够明显看出,相较于普通全连接层神经网络,本文设计的组合CNN 具备更高的训练效率和更好的训练效果,仅利用普通神经网络八分之一的训练量,就达到了与其精度相差不大的训练效果.在训练数据量相当的情况下,CNN 训练精度远远高于普通全连接层神经网络.对于测试数据,该方法的平均坐标定位距离误差为0.621 个网格,对应到空间实际平均定位距离误差为12.42 cm.
经过分析,CNN 的优越性主要体现在,普通全连接层仅仅是对数据的训练,而非建立在时序信号物理特性的基础上进行的分析训练.本文的发射信号是m序列调制的2PSK 信号,是四种码卷积核形式信号的组合,经过空间中的多径传播,接收传感器对其进行接收,二者通过卷积,即不断滑动求和,能够捕捉到各种多径信号.卷积相关峰波动较大的地方,代表信号在空间传播过程中遇到墙壁等障碍物引起的反射,导致相位发生突变.当与含有不同码元信息的卷积核卷积时,这种相位的突变能够体现室内环境的几何结构,且由于不规则的墙壁构设、障碍物间的复杂相互作用,接收信号会包含携带目标精细几何细节的信息,因此可以通过卷积从中训练出有效位置信息.
3.2 实验二
本实验检验利用室外接收传感器对室内目标的定位效果.实验环境同实验一,接收传感器位于室外固定位置(57,15).
在本轮实验中,利用CNN 进行训练,本文设置K=203,训练小批量样本大小为256,训练轮数为100,学习率为0.008,优化器设置为Adam.
由于训练至30 轮时已基本收敛,下降幅度很小,因此取前30 轮代价函数值画出变化曲线.图9 为前30 轮的训练和测试MSE 曲线.
由图9 明显看出,CNN 能够有效学习接收信号中的位置信息,从而实现室外接收站对室内目标的精确定位.测试过程中,平均定位距离误差为0.482 个网格,对应空间实际平均定位距离误差为9.64 cm.
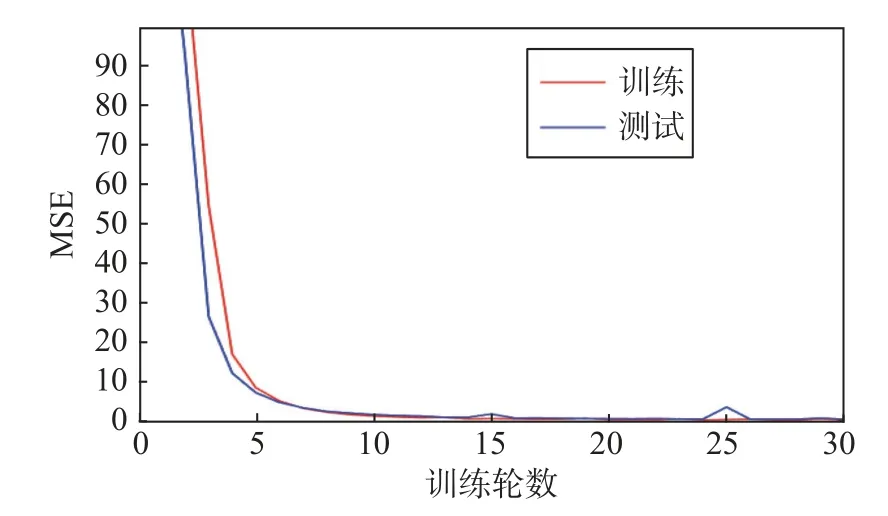
图9 训练和测试MSE 曲线(室外单接收站)Fig.9 Training and test MSE curves (outdoor single receiving station)
图10 为分别利用训练后网络和测试接收数据集预测五个不同位置目标的定位分布图.图中红色圆点为目标的位置标签,散落在目标周围的点为训练后的网络对目标的定位情况,颜色越浅,则定位坐标偏离目标位置越远.从对同一位置目标的定位分布可以发现,通过该算法估计出的定位坐标均匀地分布在标签周围,即定位误差方差较小,且每次定位精度较为稳定,能够实现室外单接收站对室内目标的精确定位.

图10 CNN 对任意目标位置的定位分布图Fig.10 The location distribution of CNN towards targets at any position
3.3 实验三
本实验检验算法在不同信噪比条件下利用CNN 对目标的定位情况.实验环境同实验一.在实际环境中,或多或少地存在噪声的影响,我们人为地在接收端加入高斯白噪声,以模拟噪声存在情况下的室内定位,观察该方法在不同信噪比条件下对目标的定位情况.训练过程中,利用CNN,设置K=203,训练小批量样本大小为256,训练轮数为100,学习率为0.000 8,优化器为Adam.
表2 为不同信噪比下的定位情况.

表2 不同信噪比下的测试结果Tab.2 Results with different SNRs
通过对上述结果的分析,我们能够实现对不同信噪比环境下利用单接收站实现对室内目标的精确定位,且信噪比越高,定位精度越高.
为了减少训练次数,验证网络的泛化性,本文利用在室内理想无噪声情况下的训练网络,实现对其他存在噪声条件下的定位.当测试数据中信噪比为20 dB 时,对目标的平均定位距离误差为3.812 个网格,对应空间实际平均定位距离误差为76.24 cm;当测试数据中信噪比为30 dB 时,对目标的平均定位距离误差为0.662 个网格,对应空间实际平均定位距离误差为13.24 cm;当测试数据中信噪比为40 dB 时,对目标的平均定位距离误差为0.43 个网格,对应空间实际平均定位距离误差为8.6 cm.说明无噪声理想环境下训练的网络对含噪声信号定位具有一定的泛化性.经过分析,在对不同信噪比测试信号数据的定位过程中,卷积的过程相当于是滑动平均,能够起到噪声平滑的作用.同时可以看出,随着信噪比降低,定位精度下降明显,即定位算法对噪声具有敏感性.信噪比在高于20 dB 情况下,算法仍然能够得到比较满意的定位精度.
3.4 实验四
本实验检验算法在待定位目标大小发生变化的情况下利用CNN 对目标的定位情况.实验环境同实验一.
首先由实验一得到目标大小为3×3 个网格训练好的网络,利用该网络结构对1×1 大小的目标进行定位测试.经过测试,平均定位距离误差为6.378 个网格,对应空间实际平均定位距离误差为1.276 m.
然后设置目标大小为1×1,产生训练数据,并对其进行训练,训练环境同实验一,网络训练MSE 为0.333,测试MSE 为2.488.利用训练好的网络结构对3×3 大小的目标进行定位测试,经过测试,平均定位距离误差为5.359 个网格,对应空间实际平均定位距离误差为1.072 m.
对以上测试结果进行分析,由于待定位目标大小发生变化,其产生散射场的等效电流发生变化,接收信号随之发生变化,因此定位精度会受到影响.但在用训练好的网络对不同大小的目标进行定位时,本算法仍然能够实现米级的定位精度,说明本算法对不同大小目标的定位具有一定的适应性,适用于对定位精度要求不高的情况下的粗略定位.
3.5 实验五
本实验检验算法在待定位目标大小发生变化的情况下利用CNN 对目标的定位情况.实验环境在实验一基础上增设一个金属柜,如图11 所示.

图11 室内场景示意图(有金属柜)Fig.11 Setting of room model parameter with a metal cabinet
金属柜占据的网格坐标位置范围为

在场景发生变化的情况下,需要对训练数据集进行更新,利用FDTD 方法生成新的训练集和测试集.训练结果如下所示:训练MSE 为0.076,测试MSE 为0.188,平均测试定位误差为0.505 个网格,对应实际误差为10.10 cm.
记室内房间没有金属柜的环境为场景A,室内房间增设金属柜的环境为场景B,利用场景A 训练的网络对场景B 的测试数据进行测试,定位效果不甚理想.经过分析发现主要是因为在室内场景中放置金属柜以后,对室内辐射源信号的传播信道影响较大,导致其与场景A 下的空间传播路径区别很大,因此由场景A 训练出的神经网络节点间的权重和偏置相差很大,CNN 难以对场景B 的目标进行精确定位.
4 结 论
本文提出一种室内单站定位技术,利用CNN 对室内电波传播的多径效应构成的复杂信道信息进行学习,通过自定义卷积核,赋予神经网络结构一定的物理意义,实现高效的精确定位.本文通过训练实现了固定接收单传感器位于室内和室外情况下的精确定位.
在单接收站位于室内时,能够实现一个网格(0.2 m)内的精确定位,对测试数据的平均定位距离误差为0.621 个网格(12.42 cm);当单接收站位于室外时,测试数据的平均定位距离误差为0.482 个网格(9.64 cm);针对存在噪声环境试验发现,噪声在信噪比高于20 dB 情况下,算法仍然能够得到比较满意的定位精度.该算法具备一定的抗噪声性和泛化性,为室内定位提供了一种新的方法.本文是在二维相对理想条件下进行的算法设计,算法如何推广到三维,以及适应不同大小的目标、目标的运动情况都需要进一步研究.
