稀疏MIMO 雷达实孔径三维成像技术
2022-11-06兰宇田佳豪刘丹阳朱永锋周剑雄
兰宇 田佳豪 刘丹阳 朱永锋 周剑雄
(国防科技大学电子科学学院,长沙 410073)
引 言
相较合成孔径雷达(synthetic aperture radar,SAR),实孔径雷达对前视以及近距离目标有较高的分辨率[1-3]和实时的成像能力,如层析SAR、阵列SAR 等三维SAR 成像需配合一定航迹的观测数据才能获得三维信息[4-5],而实孔径雷达可以快速解出目标三维信息,且具有较高的自由度.
为获得高角度分辨率,实孔径雷达需设计较大的天线孔径,可能会增加系统成本以及后期维护成本.稀疏阵列设计常采用遗传算法、粒子群算法等等优化算法[6-11],可以在较少阵元数量的前提下获得较大的阵列孔径,实现实孔径雷达低成本、高精度的目标.
多输入多输出(multiple-input multiple-output,MIMO)雷达是把通信系统中MIMO 概念与数字阵列雷达相结合的一种新体制雷达[12].MIMO 技术可以利用空间分集、极化分集、频率分集、波形分集等方式[13]获得收发联合的虚拟阵元和等效孔径,在等效孔径概念基础上,MIMO 阵列可以转换为单程阵列进行设计[14-15].MIMO 与稀疏阵列结合设计优势在于等效孔径为稀疏阵列设计提供了更多的设计空间,为更优的阵列性能创造了条件.
针对MIMO 稀疏阵列,本文给出了MIMO 单快拍成像模式(以下简称MIMO 模式)和相控阵多帧联合成像模式(以下简称相控阵模式)两种三维成像方法,推导了两种模式下的三维成像原理,对比了两种模式下角度分辨率和信噪比(signal noise ratio,SNR)的异同.分析过程及仿真结果表明 MIMO 模式与相控阵模式的角度分辨率是一致的,相控阵模式的SNR 大于MIMO 模式的SNR.
1 稀疏面阵三维成像原理
1.1 前提条件
本文推导过程满足:信号相对阵列为窄带信号,目标位于阵列远场.
窄带信号[16]7的带宽B满足

式中:v为信号源传播速度;L为阵列天线最大轮廓尺寸.
信号相对阵列为窄带信号,则各阵元接收(或到达)某一散射点处的信号时间差小于信号的时间分辨率(约等于1 /B),不影响信号的复包络[16]15,故各阵元接收(或到达)某一散射点处的距离处于同一个距离单元,与阵元位置无关,此时信号的时域和空域可以分开.
远场条件[1]4散射点与阵列的距离R满足

式中,λ为发射信号的波长.
当目标位于阵列的远场时,各阵元接收(或到达)某一散射点处的信号时间差可以线性表示.
1.2 测距原理(时域)
本文推导及仿真过程采用线性调频信号:

式中:T为调频时间;f0为载频;K为调频斜率.
发射信号经距离为R处的某个散射点,设信号强度为1,则回波信号表达式为

式中,τ=2R/c.
选择去斜接收方法对回波信号进行脉冲压缩,在混频之后进行采样能够有效降低对系统采样率的要求.
去斜接收具体过程如下:
1) 混频
因实孔径雷达成像一般用于近距离目标,故参考距离一般选作0,有

2) 采样
对混频之后的信号采样,设在整个调频时间T内进行L点采样,对式(5)做变量替换,得到采样之后的信号表达式为

3) 对式(6)做LFFT点快速傅里叶变换(fast Fourier transform,FFT),有

1.3 两种模式下的测角原理(空域)
均匀满阵是指阵元等间距排列的阵列,稀疏阵可以看成是在均匀满阵的栅格中选择部分阵元形成的[17],如图1 所示. (dx,dy)代表阵列最小间距,(xi,yi,0)代 表第i个阵列坐标,定义矩阵E,其元素为


图1 稀疏阵列图Fig.1 The graph of sparse array
1.3.1 MIMO 模式测角原理
假设接收阵元M个,发射阵元N个,(xrm,yrm,0)为第m个接收阵元的坐标,(xtn,ytn,0)为 第n个发射阵元的坐标,设某个散射点在球坐标系中坐标为 (R,θ,φ),在xyz直角坐标系中坐标为 (x0,y0,z0),阵列与目标相对位置关系如图2 所示.

图2 二维阵列与目标的相对位置Fig.2 Relative position of the 2D array to the target
第n个发射阵元发射的信号到散射点处的信号sn(t)为

当散射点位于阵列的远场时,各阵元到散射点之间的时延差满足线性关系:

式中:v=sin θsinφ;u=cos θsinφ.

在MIMO 模式下发射信号在散射点处不进行相干叠加,第n个发射信号到达第m个接收阵元信号为

式中:nmn(t)为高斯白噪声.
由式(12)可推出MIMO 虚拟接收阵元位置[16]:

式中:M为接收阵元数量;N为发射阵元数量;MN为等效阵元数量.MIMO 模式可在任意一个快时间维采样点上(单快拍)获得MN个虚拟通道,通过空间分集、波形分集等方式使信号在散射点处不进行相干叠加.
由式(12)和(13)可得到MIMO 收发联合导向矢量:

1) 收发联合数字接收波束形成
设数字接收波束指向 (vr,ur),在线性加权情况下,MIMO 等效阵列接收波束形成权系数为

MN个等效接收阵列的波束形成使信号幅度、噪声功率、SNR 均增加了MN倍,故波束形成等效于相干累积过程.


式中:I1=max(x)/dx;I2=max(y)/dy;(dx,dy)为等效接收阵列最小间距.
令矩阵E满足

结合式(17)得

如果等效接收阵列为均匀满阵,则E为一个元素全为1 的矩阵,式(19)简化为

均匀面阵的方向图近似为两个sinc 函数的乘积,采用3 dB 波束宽度表征其角度分辨性能:

由式(20)、(21)可以得出:稀疏面阵的波束形成相当于对均匀满阵做二维加窗FFT,E(i1,i2)是阵元维的二维窗函数,可使稀疏面阵方向图的主瓣展宽.
采用阵列方向图一个周期内的波束指向变化范围表征阵列的无模糊测角范围[18]:

可以看出,阵元间距 (dx,dy)与无模糊测角范围成反比,当dx=λ/2,dy=λ/2时,-1 ≤vr≤1,-1 ≤ur≤1,可以获得全向的探测范围.
1.3.2 相控阵模式测角原理
N个发射阵源发射信号到达目标散射点处,表达式为

在各阵元线性加权的情况下,设发射波束指向(vt,ut),相控阵发射波束形成权系数为

相控阵模式下,信号在目标散射点处加权叠加,有

式中,Pt(vt,ut)=为发射方向图函数.在相控阵模式下信号在散射点处相干叠加,这是相控阵模式与MIMO 模式最本质的区别.
信号经散射到达M个接收阵元的信号可表示为

相控阵数字接收波束形成权系数为

用式(27)中的权系数对式(26)进行数字接收波束形成,有

为相控阵方向图,其为接收方向图Pr(vr,ur)与发射方向图Pt(vt,ut)的乘积.
当数字接收波束指向(vr,ur)及其步进等于发射波束指向 (vt,ut)及其步进时,可以对回波信号进行多帧联合信号处理,对式(29)做等价变换,有

求得峰值点坐标为vrmax=v,urmax=u,峰值为max(P相控阵(v,u))=MN.
1.3.3 相控制模式与MIMO 模式等效阵列的一致性
稀疏阵列的波束形成等价于对均匀面阵的二维加窗波束形成,所以

式中:(drx,dry)为 接收阵最小间距;(dtx,dty)为发射阵最小间距.
对式(31)做变量替换,有

由以上过程可推导出多帧联合处理的等效阵列:

与式(13)对比可以看出,相控阵多帧成像的等效阵列与MIMO 模式下是一致的.
等效接收阵列最小间距为发射阵列最小间距和接收阵列最小间距的最大公约数,所以dx≤min(dtx,drx)及dy≤min(dty,dry),虚拟接收阵列相比实际接收阵列更有可能获得更大的无模糊测角范围.
1.3.4 相控阵模式与MIMO 模式SNR 分析
MIMO 模式下,信号幅度的相干增益来自于MN个等效接收阵列的数字接收波束形成;相控阵模式下,信号幅度的相干增益来自于N个发射阵元的发射波束形成和M个接收阵元的数字接收波束形成.两种模式下空间波束形成带来的信号相干增益是一致的.发射阵列稀疏可能导致发射方向图产生异变(比如栅瓣),接收阵元稀疏也可能导致接收方向图产生异变,但经过多帧联合成像,相控阵合成的方向图是接收方向图和发射方向图的乘积,等效于MIMO模式的方向图,改善了稀疏阵列的方向图形态.
MIMO 模式和相控阵模式各接收机接收到的信号可以看作是一个合成信号,M个接收通道之间的噪声是相互独立的.MIMO 模式以波形分集为例,N个发射信号正交,各接收通道的匹配滤波器组与N个发射信号一一对应,M个相互独立的噪声随接收信号经过匹配滤波器组后,得到MN个相互独立的噪声.对于相控阵模式,各接收通道的匹配滤波器组对应一个相同的发射信号,得到M个相互独立的噪声.
雷达系统的噪声主要来自于外部噪声(太阳和宇宙的噪声)以及内部噪声(热噪声、起伏噪声和闪烁噪声等),接收机的热噪声是最主要的部分[19].在MIMO 模式下,噪声产生于数字接收波束形成之前,因此噪声经过了MN个虚拟接收阵元的功率合成.在相控阵模式下噪声绝大部分都产生于发射波束形成之后,所以噪声只经过M个实际接收阵元的功率合成.
MIMO 模式与相控阵模式波束形成中SNR 与发射阵元数量N、接收阵元数量M的关系如表1 所示,可以得出相控阵模式与MIMO 模式SNR 的比值为发射阵列数量N.

表1 两种模式下阵元数量与SNR 关系Tab.1 Relationship between array number and SNR with 2 modes
2 稀疏阵列三维成像仿真
2.1 稀疏阵列设计结果
本文根据MIMO 等效阵列结构进行稀疏阵列设计,采用粒子群算法[7-10],得到稀疏阵列结构及其等效阵列,如图3 所示.发射和接收阵数量分别为8 和16,等效阵列数量为124,等效阵列最大孔径为110、113 个栅格,栅格大小(最小阵元间距)约等于半波长,第一副瓣水平为-9 dB 左右.
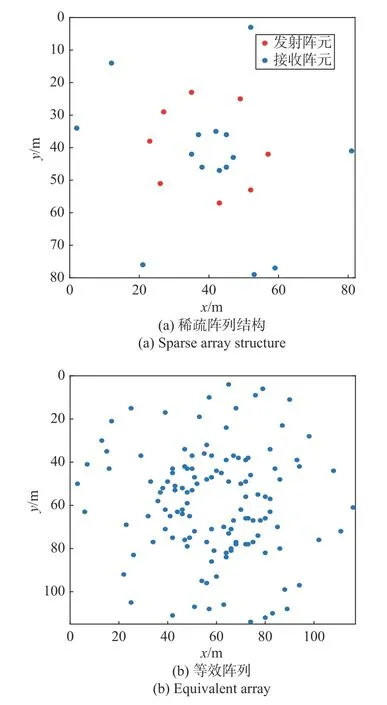
图3 稀疏阵列结构及其等效阵列Fig.3 The sparse array structure and its equivalent array
2.2 三维成像仿真结果
仿真条件:载频f0为77 GHz,调频带宽B为512 MHz,最大无模糊距离为75 m 左右,目标位置x轴:-21 m~21 m,y轴:0~15 m,z轴:19.5~37.5 m,初始SNR 为10 dB,MIMO 模式及相控阵模式三维仿真结果如图4 所示.依照图4(a)中的船只模型仿真得到图4(b)和(c),可以看出,MIMO 模式和相控阵模式的三维仿真结果类似.


图4 船只模型及其三维仿真结果Fig.4 The ship model and its 3D MIMO simulation results
3 角度分辨率仿真结果
3.1 角度分辨率分析
根据稀疏阵列设计的结果,指向法线方向(v=0,u=0)的等效虚拟接收阵列方向图如图5 所示.


图5 指向法线方向的等效阵列方向图Fig.5 The pattern of equivalent array pointing the normal direction
取归一化方向图函数值为-3 dB 的坐标点,计算得到主瓣波束宽度为:(v3dB≈0.021,u3dB≈0.023).
等效阵列最大孔径为 (I1=110,I2=113)个半波长,若是阵元间距为半波长的均匀满阵,(v=0,u=0)附近的角度分辨率为

与均匀满阵相比,稀疏阵列角度分辨性能有所下降,验证了E(i1,i2)可使方向图主瓣展宽的结论.
3.2 仿真结果
在v-u平面设置2 个点,坐标为 (-0.010 5,0)、(0.010 5,0),仿真结果如图6(a)和(b)所示;在v-u平面设置2 个点,坐标为 (0,-0.011 5)、(0,0.011 5),仿真结果如图6(c)和(d)所示.可以看出,相控阵模式与MIMO 模式的角度分辨率是一致的.


图6 MIMO 模式与相控阵模式角度分辨率Fig.6 The angle resolution of MIMO and phased array modes
4 SNR 仿真结果
仿真条件:载频f0为77 GHz,调频带宽B为256 MHz,最大不模糊测距为75 m 左右,散射点在xyz坐标系中为 (0,0,15),初始SNR 为-5 dB,沿y=0截取,得到xz平面的投影图,如图7 所示.可以看出,相控阵模式下的SNR 明显优于MIMO 模式.
MIMO 模式与相控阵模式SNR 验证:截取图7中z=(30 60)范围内的数据作为噪底求其方差,取最大值作为信号幅度,统计得出SNRMIMO=2.643 6×104和SNR相控阵=3.339 0×104,得到:

图7 MIMO 模式与相控阵模式SNR 对比Fig.7 The SNR comparison between MIMO and phased array modes

说明相控阵模式与MIMO 模式SNR 的比值等于发射阵元数量.
虽然稀疏阵列在尽量少的阵元数量情况下可获得较高的角度分辨率,但会导致副瓣水平的提高,从图5可以看出稀疏阵列的方向图旁瓣水平较高,约为-9 dB,且保持不变,不会出现均匀满阵方向图中旁瓣水平逐渐衰减的特性,因此图7 中副瓣区域明显比底噪区域值高.
5 结 论
相控阵多帧联合成像模式的优点:一是因其发射合成波束的特点,所以具有较高的SNR;二是在信号处理过程中,不需要对各个发射通道分别匹配滤波,数据维度相较MIMO 模式少很多,信号处理过程更简洁.
MIMO 单快拍模式的优点:一是MIMO 单快拍模式下可以实现实时成像,可以不经过多帧数据积累而获得较高的角度分辨率;二是波形设计较为灵活,比如作为车载雷达,利用正交波形可以避免不同车载雷达发射信号之间的干扰;三是MIMO 模式不需要波束扫描,进行几百以至于上千个积累脉冲数的积累而不需要考虑跨波束的问题[13].
因此,MIMO 单快拍模式适合复杂的并且对实时性要求较高的环境,相控阵多帧联合模式适合对SNR 要求较高且较为简单的场景.
本文主要讨论了目标位于阵列远场条件下的三维成像方法,下一步将研究目标位于阵列近场条件下的三维成像方法[2].
